Спосіб оцінювання функціонального стану опорно-рухового апарату
Номер патенту: 71927
Опубліковано: 25.07.2012
Автори: Чепурний Віктор Андрійович, Колесніченко Віра Анатоліївна, Літвіненко Костянтин Миколайович, Тяжелов Олексій Алимович

Формула / Реферат
Спосіб оцінювання функціонального стану опорно-рухового апарату людини, установленої у вертикальній позі на горизонтальній площині опорної платформи, що полягає у вимірюванні координат антропометричних точок тулуба і нижніх кінцівок у фронтальній і сагітальній площинах та їх аналізі, який відрізняється тим, що визначають проекцію та прямокутні координати проекції загального центру мас тіла людини на горизонтальну площину опорної платформи, вимірюють прямокутні координати проекцій антропометричних точок на горизонтальну площину опорної платформи та обчислюють величину зміщення прямокутних координат проекцій на горизонтальну площину опорної платформи антропометричних точок відносно прямокутних координат проекції на горизонтальну площину опорної платформи загального центра мас.
Текст
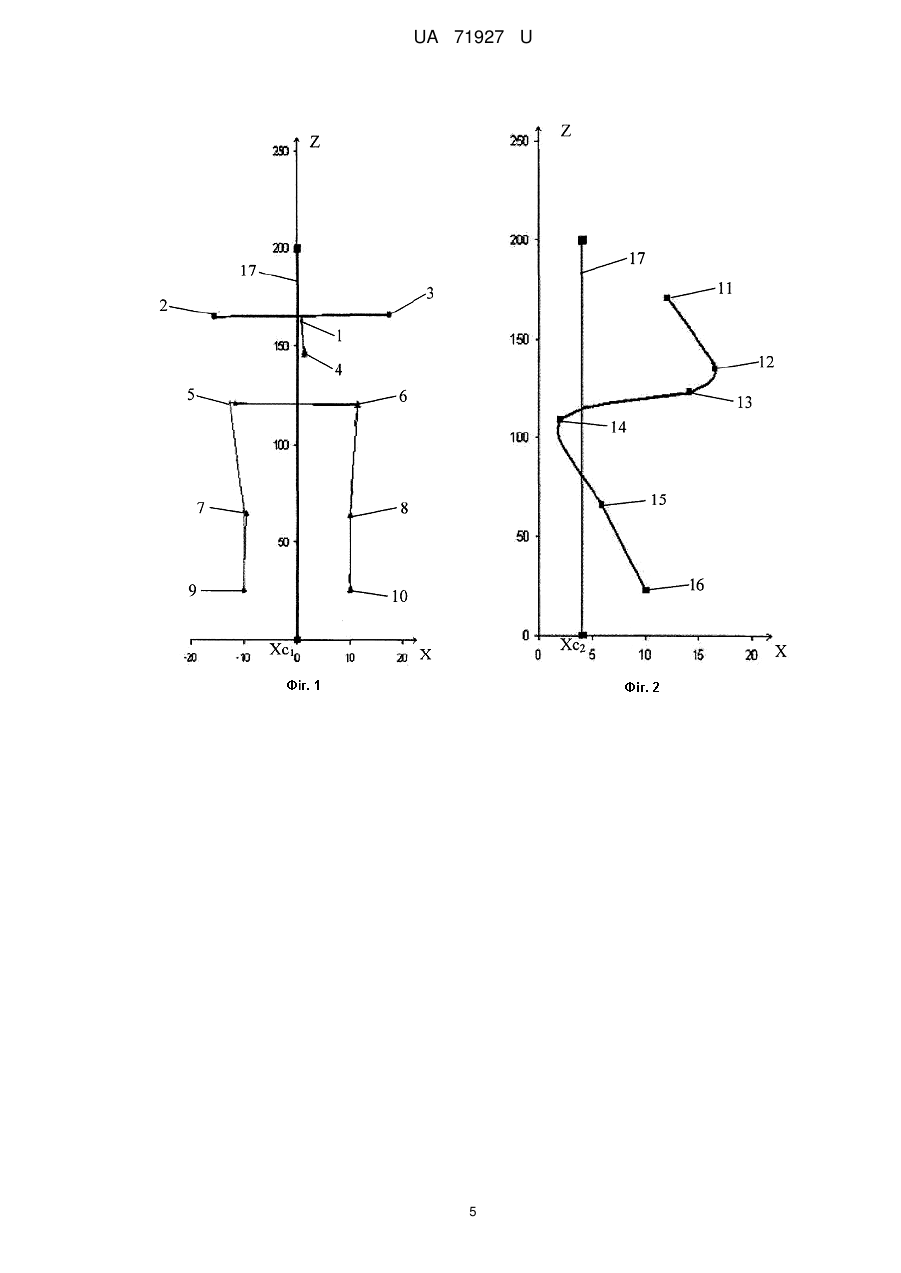
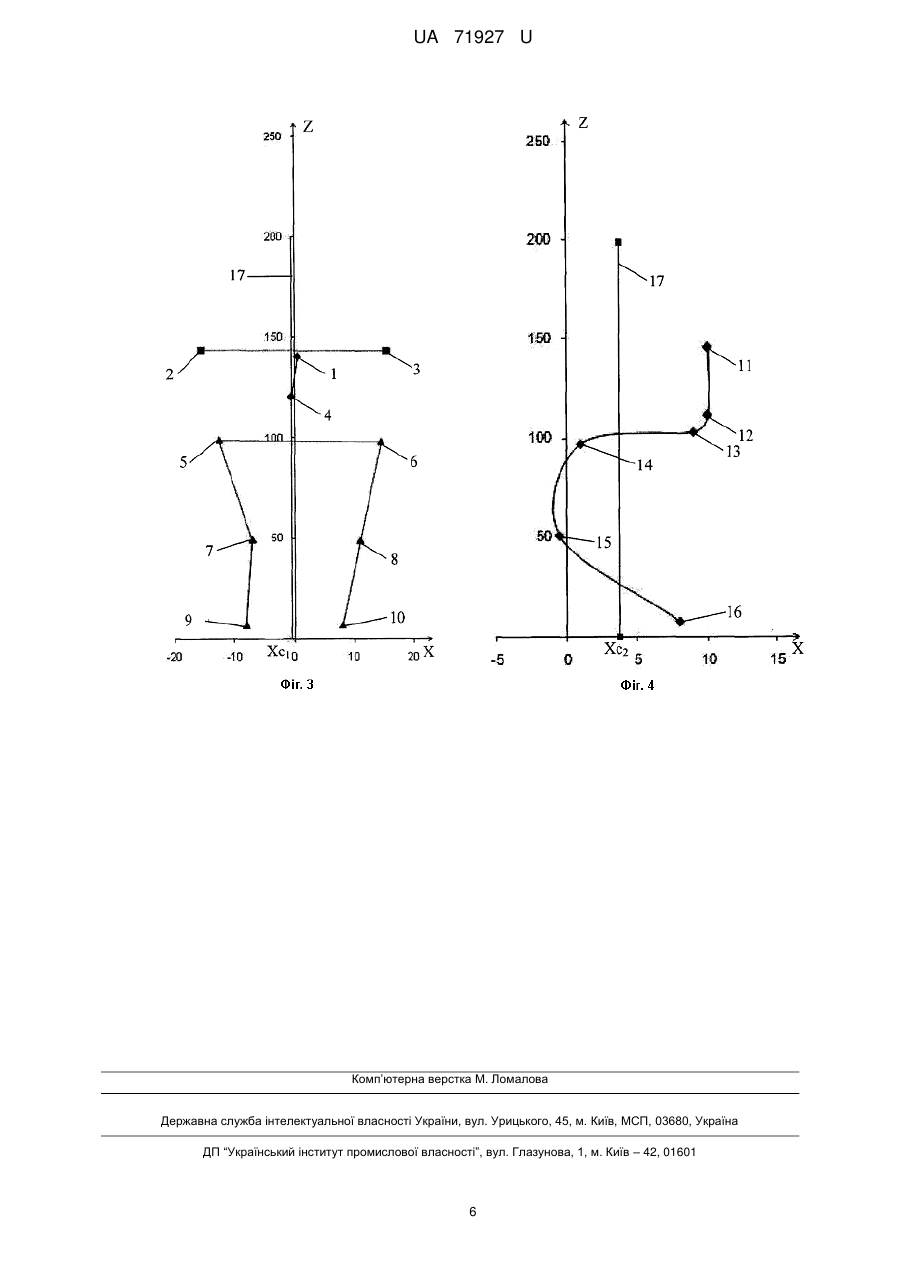
Реферат: Спосіб оцінювання функціонального стану опорно-рухового апарату людини належить до галузі медицини, а саме до травматології та ортопедії, зокрема до визначення, вимірювання та реєстрації для діагностичних та лікувальних цілей, та забезпечує можливість визначити спосіб замикання опорних суглобів тіла людини, підвищити точність визначення характеру позиційної роботи м’язів та взаємодії м’язових груп в утриманні вертикальної пози. UA 71927 U (12) UA 71927 U UA 71927 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі медицини, а саме до травматології та ортопедії, зокрема до визначення, вимірювання та реєстрації для діагностичних та лікувальних цілей, і може бути використана для оцінювання функціонального стану опорно-рухового апарату людини. Відомий спосіб оцінювання функціонального стану опорно-рухового апарату людини шляхом обстеження його хребетного стовпа у сагітальній площині з використанням топографічної фотометрії (патент Російської Федерації 2272563 (С1), М. кл. А61В 5/103, опубл. 27.03.2006). Згідно з відомим способом, пацієнта установлюють на горизонтальній площадці у природній вертикальній позі в розслабленому положенні його тіла, маркують антропометричні точки хребта, фотографують спину пацієнта цифровою фотокамерою, виводять отримане зображення на екран монітора комп'ютера, обробляють його шляхом контурування, програмного побудування тримірного зображення хребетного стовпа у сагітальній площині, обчислюють координати антропометричних точок відносно вертикалі, яка задається програмою, та горизонтальної площини, а також поперековий кут та аналізують ці координати. Недоліками відомого способа є відсутність урахування положення тулуба та головних суглобів нижніх кінцівок, що не дає можливості визначити характер позиційної роботи м'язів по утриманню вертикального положення тіла, а також те, що не оцінюється розташування антропометричних точок тіла людини у фронтальній площині. Тобто цей відомий спосіб має обмежені функціональні можливості та дає недостатньо вірогідну і недостатньо інформативну оцінку функціонального стану опорно-рухового апарату людини. Недоліками відомого способу є неможливість визначення способу замикання опорних зчленувань тіла людини, недостатня точність визначення характеру позиційної роботи м'язів та взаємодії м'язових груп в утриманні вертикальної пози. За найближчий аналог технічного рішення, що заявляється, вибрано спосіб оцінювання функціонального стану опорно-рухового апарату людини, установленої у вертикальній позі на горизонтальній площині опорної платформи, що включає визначення координат антропометричних точок тулуба і нижніх кінцівок у фронтальній та сагітальній площинах та їх аналіз (патент України 15652 (U), М. кл. А61В 5/107, опубл. 17.07.2006). Згідно з цим відомим способом, фотографують тіло пацієнта, з попередньо маркованими на ньому антропометричними точками, цифровою фотокамерою на фоні координатної сітки або метричної стрічки-виска, обробляють фотографічне зображення тіла пацієнта за допомогою комп'ютерної програми з використанням ліній координатної сітки або метричної стрічки-виска як вертикальних та горизонтальних перпендикулярів при розмітці зображення, наносять на одержане зображення тіла пацієнта на екрані монітора комп'ютера горизонтальні лінії-орієнтири та вертикальні лінії-виски, орієнтуючись на лінії координатної сітки, проектують лінії-виски на зображення тіла пацієнта та обчислюють по комп'ютерним зображенням координати антропометричних точок, які далі аналізують. Цей відомий спосіб, на відміну від попереднього аналога, ураховує положення тулуба та головних суглобів нижніх кінцівок та дає можливість оцінити розташування антропометричних точок тіла людини у фронтальній площині. Однак ця оцінка розташування антропометричних точок тіла людини є непрямою. Крім того, відомий спосіб має низку тих же недоліків, що й попередній аналог: неможливість визначення способу замикання опорних зчленувань тіла людини, недостатня точність визначення характеру позиційної роботи м'язів та взаємодії м'язових груп в утриманні вертикальної пози. В основу корисної моделі поставлена задача створення такого способу оцінювання функціонального стану опорно-рухового апарату, в якому б забезпечувалось виявлення способу замикання опорних зчленувань шляхом визначення розташування ланок кінематичного ланцюга тіла людини відносно лінії дії сили ваги, досягалось підвищення точності визначення характеру позиційної роботи м'язів та взаємодії м'язових груп в утриманні вертикальної пози. Поставлена задача вирішується тим, що у способі оцінювання функціонального стану опорно-рухового апарату людини, установленої у природній вертикальній позі на горизонтальній площині опорної платформи, який полягає у визначенні координат антропометричних точок тулуба і нижніх кінцівок у фронтальній та сагітальній площинах та їх аналізі, згідно з корисною моделлю, визначають проекцію та прямокутні координати проекції загального центру мас тіла людини на горизонтальну площину опорної платформи, вимірюють прямокутні координати проекцій антропометричних точок на горизонтальну площину опорної платформи та обчислюють величину зміщення прямокутних координат проекцій на горизонтальну площину опорної платформи антропометричних точок відносно прямокутних координат проекції на горизонтальну площину опорної платформи загального центра мас. 1 UA 71927 U 5 10 15 20 25 30 35 40 45 50 55 60 Визначення проекції та прямокутних координат проекції загального центру мас тіла людини на горизонтальну площину опорної платформи, вимірювання прямокутних координат проекцій антропометричних точок на горизонтальну площину опорної платформи та обчислення величини зміщення прямокутних координат проекцій на горизонтальну площину опорної платформи антропометричних точок відносно прямокутних координат проекції на горизонтальну площину опорної платформи загального центра мас забезпечує виявлення способу замикання опорних зчленувань шляхом визначення розташування ланок кінематичного ланцюга тіла людини відносно лінії дії сили ваги, підвищення точності визначення характеру позиційної роботи м'язів та взаємодії м'язових груп в утриманні вертикальної пози. Суть корисної моделі пояснюється конкретним прикладом її здійснення та кресленнями, на яких: фіг. 1 - діаграма, що відображає розташування у координатній площині XOZ антропометричних точок, проекції загального центра мас та лінії дії сили ваги у фронтальній площині в нормі, тобто при відсутності патологічних станів опорно-рухового апарату; фіг. 2 - діаграма, що відображає розташування у координатній площині XOZ антропометричних точок, проекції загального центра мас та лінії дії сили ваги у сагітальній площині в нормі, тобто за відсутності патологічних станів опорно-рухового апарату; фіг 3 - діаграма, що відображає розташування у координатній площині XOZ антропометричних точок, проекції загального центра мас та лінії дії сили ваги у фронтальній площині при відхиленні від норми, тобто за наявності патологічних станів опорно-рухового апарату; фіг 4 - діаграма, що відображає розташування у координатній площині XOZ антропометричних точок, проекції загального центра мас та лінії дії сили ваги у сагітальній площині при відхиленні від норми, тобто за наявності патологічних станів опорно-рухового апарату. Спосіб оцінювання функціонального стану опорно-рухового апарату людини згідно з корисною моделлю здійснюють таким чином. На тілі пацієнта позначають водорозчинними позначками антропометричні точки, показані на діаграмах у координатній площині XOZ (фіг. 1-4): у фронтальній площині - яремна вирізка 1, проекція 2 правого ключично-акроміального зчленування, проекція 3 лівого ключичноакроміально зчленування, мечоподібний відросток 4, права верхня передня клубова ость 5, ліва верхня передня клубова ость 6, проекція 7 правого колінного суглоба, проекція 8 лівого колінного суглоба, проекція 9 правого надп'ятково-гомілкового суглоба, проекція 10 лівого надп'ятково-гомілкового суглоба, у сагітальній площині - остисті відростки 11, 12, 13 хребців СVII, LI, LV відповідно, верхівка 14 великого вертлюга (анатомічний орієнтир кульшового суглоба), проекція 15 щілини колінного суглоба на перетині з верхівкою малогомілкової кістки (анатомічний орієнтир колінного суглоба), верхівка 16 зовнішньої кісточки (анатомічний орієнтир надп'ятково-гомілкового суглоба). Хворого установлюють на горизонтальну опорну платформу комп'ютерного стабілографа в природній вертикальній позі з опорою на обидві ноги на позначені місця, що задані настройками комп'ютера стабілографа, згідно з розміром стопи і по зображенню на координатній сітці на екрані монітора комп'ютера стабілографа визначають місцеположення проекції загального центра мас тіла пацієнта на координатній сітці, побудованій у системі плоских прямокутних координат XOY, яка нанесена на горизонтальну площину опорної платформи стабілографа. Після цього вимірюють по координатній сітці опорної платформи прямокутні координати ХC, YC горизонтальної проекції загального центру мас тіла пацієнта на горизонтальну площину опорної платформи, відповідно у фронтальній та сагітальній площинах. На певній відстані від опорної платформи установлюють вертикально у фронтальній площині екран з прозорого матеріалу, зокрема з плексигласу, поділений навпіл нанесеною на нього вертикальною лінією, яку вибирають за вісь OZ, перпендикулярною до горизонтальної площини, так, щоб координата X проекції вертикальної лінії екрана, що ділить його навпіл, на горизонтальну площину дорівнювала нулю на осі ОХ координатної сітки опорної платформи. Далі пацієнт займає природну вертикальну позу при стоянні з опорою на обидві ноги і дивиться прямо поперед себе, зосередивши погляд на точці, яка знаходиться на відстані приблизно п'ять метрів від нього. За наявності у пацієнта больового синдрому допускається його перебування в аналогічній позі. Вимірюють фронтальний та сагітальний профілі постави. Для цього наводять лазерний промінь крізь прозорий екран з плексигласу по черзі на усі позначені антропометричні точки, вибрані за візуальні орієнтири у відповідній площині, притиснувши генератор лазерного променя до плексигласового скла екрана, і наносять маркером на поверхню скла екрана проекції цих точок за лазерним променем. Після цього 2 UA 71927 U 5 10 15 20 25 30 35 40 45 50 55 60 пацієнт сходить з опорної платформи. Перенесення проекцій антропометричних точок на екран з плексигласового скла займає приблизно одну хвилину, що є достатнім для збереження пацієнтом зручної для нього нерухомої вертикальної пози. За допомогою лінійки або іншого вимірювального інструмента для вимірювання вручну вимірюють на прозорому екрані координати Χ, Ζ кожної з нанесених на нього проекцій антропометричних точок у системі прямокутних координат ΧΟΖ, де О - початок координат, ОХ вісь абсцис, що лежить у горизонтальній площині опорної платформи і розташована перпендикулярно вертикальній лінії, що ділить прозорий екран навпіл, ΟΖ - вісь ординат, що співпадає з вертикальною лінією прозорого екрана. Координату X кожної з антропометричних точок відраховують від вертикальної лінії прозорого екрана у площині останнього по горизонталі вліво або вправо. Координату Ζ кожної з антропометричних точок відраховують на площині прозорого екрана від рівня горизонтальної площини опорної платформи, тобто від осі ОХ, уздовж вертикальної лінії прозорого екрана, що є віссю ΟΖ. Результати вимірювань координат антропометричних точок та загального центра та проекції загального центра мас реєструють в електронному вигляді та вводять в програму MS Excel. За цими даними на екрані монітора комп'ютера одержують відображення розташування антропометричних точок та загального центра мас у системі координат XOZ у фронтальній та сагітальній площинах (фіг. 1-4). Для здійснення оцінки функціонального стану опорно-рухового апарата пацієнта, від проекції загального центра мас на горизонтальну площину опорної платформи, що визначається координатою Х С1 для антропометричних точок фронтальної площини (дорівнює вищезазначеній координаті Х С проекції загального центра мас на горизонтальну площину опорної платформи) та координатою Х С2 для антропометричних точок сагітальної площини (дорівнює вищезазначеній координаті YС проекції загального центра мас на горизонтальну площину опорної платформи), проводять паралельно осі OZ вертикальну лінію 17 дії сили ваги і проекції антропометричних точок з'єднують між собою лініями так, як показано на фігурах креслень. На фіг. 1, 3 горизонтальна лінія, що з'єднує між собою антропометричні точки 2, 3, характеризує положення надпліччя, вертикальна лінія, що з'єднує між собою антропометричні 1, 4, відповідає проекції груднини, ламана лінія, що послідовно з'єднує між собою антропометричні точки 9, 7, 5, 6, 8, 10, характеризує положення нижніх кінцівок та таза. Сагітальний контур опорно-рухового апарату, утворений його кінематичними ланками, характеризується криволінійною лінією, що послідовно з'єдную між собою антропометричні точки 11, 12, 13, 14, 15, 16. Одержані графічні зображення у системі прямокутних координат наглядно демонструють розташування антропометричних точок, а отже й відповідних їм опорних суглобів, у просторі відносно лінії дії сили ваги і дають можливість здійснити вірогідну оцінку відхилень положень опорних суглобів від їх нормальних положень по величині зміщення на фіг. 1-4 проекцій на вісь ОХ антропометричних точок відносно координат Х С1, ΧС2 проекцій на цю вісь загального центра мас. Це дає уявлення про способи замикання суглобів та характер взаємодії м'язових груп, які стабілізують суглоби та приймають участь у підтримці вертикальної пози. Фіг. 1, 2 креслень демонструють нормальний функціональний стан опорно-рухового апарату людини, що стоїть на опорній платформі, прийнявши природну вертикальну позу. В нормальному стані розташування антропометричних точок свідчить про таке. Як видно з фіг. 2, в сагітальній площині, коли пацієнт повернутий до прозорого екрану лівим боком, тулуб (точки 11-13) нахилений уперед, відносно лінії дії сили ваги, кульшовий суглоб (точка 14) зміщений уперед, колінний (точка 15) та надп'ятково-гомілковий (точка 16) суглоби знаходяться позаду лінії дії сили ваги. У фронтальній площині (фіг. 1) кожна пара правих і лівих однойменних антропометричних точок (точки 2-3; 5-6; 7-8; 9-10) розташована симетрично відносно проекції ХС1 загального центру мас та лінії 17 дії сили ваги на однаковій відстані від горизонтальної площини опорної платформи (від осі ОХ на фіг. 1). Проекція груднини (лінія, що з'єднує точки 1, 4) розташована на фіг. 1 справа від лінії 17 дії сили ваги під невеликим кутом до неї, причому яремна вирізка (точка 1) розташована ближче до лінії 17 дії сили ваги, ніж мечоподібний відросток (точка 4). При такому розташуванні антропометричних точок обертальні моменти, які створюються під дією сили ваги в кожному з опорних суглобів, дорівнюють нулю, що свідчить про врівноважену дію м'язів-згиначів та м'язів-розгиначів кожного із опорних суглобів, внаслідок чого опорні суглоби стабілізуються переважно пасивним напруженням зв'язкового апарату та ізотонічним напруженням мускулатури, тобто з мінімальними енергетичними витратами. Відхилення функціонального стану опорно-рухового апарату людини від норми демонструють фіг. 3, 4 креслень, що відповідають наведеному нижче клінічному прикладу. Клінічний приклад. Хворий С., 31 рік, історія хвороби № 81106. Діагноз: остеохондроз поперекового відділу хребта, грижі міжхребцевих дисків хребтових рухових сегментів LIV-LV, 3 UA 71927 U 5 10 15 20 LV-SI, іритація корінців хребців LV, SI зліва. У лабораторії біомеханіки ДУ "ІПХС ім. проф. М. Л. Ситенка НАМНУ" було проведено обстеження хворого пропонованим згідно з корисною моделлю способом на наявність патологічних станів опорно-рухового апарату. За результатами вимірювань координат антропометричних точок (фіг. 3, 4) виявлений тип стояння, при якому в сагітальній площині тулуб (точки 11, 12, 13) розташований майже паралельно лінії 17 дії сили ваги, кульшовий (точка 14) та колінний (точка 15) суглоби знаходяться попереду, надп'ятковогомілковий суглоб (точка 16) - позаду лінії 17 дії сили ваги. Про особливості розташування опорних суглобів при цьому характеризує величина зміщення координат X відповідних їм антропометричних точок відносно координати Х С2 проекції загального центра мас. Стабілізація випрямленого тулуба забезпечується надлишковою позиційною роботою м'язів - випрямлячів хребта. Фіксація колінного суглоба, який знаходиться в згинальній установці, відбувається з надлишковою позиційною роботою прямого м'яза стегна. У фронтальній площині (фіг. 3) відмічається нахил таза вправо (як компенсація анталгічної деформації тулуба) з позиційним розслабленням та розтягненням м'язів пельві-торакальної та пельві-трохантерної груп праворуч та перенапруженням м'язів пельві-трохантерної групи та м'язів нижньої кінцівки вліво. Таким чином, пропонований згідно з корисною моделлю спосіб оцінювання функціонального стану опорно-рухового апарату дає можливість визначити спосіб замикання опорних зчленувань тіла людини, підвищити точність визначення характеру позиційної роботи м'язів та взаємодії м'язових груп в утриманні вертикальної пози, визначити наявність та особливості м'язового дисбалансу. До того ж, пропонований спосіб є доволі простим у реалізації. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 Спосіб оцінювання функціонального стану опорно-рухового апарату людини, установленої у вертикальній позі на горизонтальній площині опорної платформи, що полягає у вимірюванні координат антропометричних точок тулуба і нижніх кінцівок у фронтальній і сагітальній площинах та їх аналізі, який відрізняється тим, що визначають проекцію та прямокутні координати проекції загального центру мас тіла людини на горизонтальну площину опорної платформи, вимірюють прямокутні координати проекцій антропометричних точок на горизонтальну площину опорної платформи та обчислюють величину зміщення прямокутних координат проекцій на горизонтальну площину опорної платформи антропометричних точок відносно прямокутних координат проекції на горизонтальну площину опорної платформи загального центра мас. 4 UA 71927 U 5 UA 71927 U Комп’ютерна верстка М. Ломалова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for assessment of functional state of locomotor system
Автори англійськоюKolesnichenko Vira Anatoliivna, Tiazhelov Oleksii Alimovych, Lytvynenko Kostiantyn Mykolaiovych, Chepurnyi Viktor Andriovych
Назва патенту російськоюСпособ оценивания функционального состояния опорно-двигательного аппарата человека
Автори російськоюКолесниченко Вера Анатольевна, Тяжелов Алексей Алимович, Литвиненко Константин Николаевич, Чепурный Виктор Андреевич
МПК / Мітки
МПК: A61B 5/103, A61B 5/00
Мітки: опорно-рухового, апарату, стану, функціонального, спосіб, оцінювання
Код посилання
<a href="https://ua.patents.su/8-71927-sposib-ocinyuvannya-funkcionalnogo-stanu-oporno-rukhovogo-aparatu.html" target="_blank" rel="follow" title="База патентів України">Спосіб оцінювання функціонального стану опорно-рухового апарату</a>
Спосіб непрямої оцінки функціонального стану опорно-рухового апарату людини
Номер патенту: 58892
Опубліковано: 15.08.2003
Автори: Мітелев Дмитро Анатолійович, Радченко Володимир Олександрович, Рябов Олег Валентинович, Суббота Ігор Анатолійович, Карпінський Михайло Юрійович
МПК: A61B 5/103
Мітки: стану, непрямо, апарату, опорно-рухового, оцінки, людини, функціонального, спосіб
Формула / Реферат:
Спосіб непрямої оцінки функціонального стану опорно-рухового апарату людини, що заснований на отриманні статограм при двохопорному стоянні та стоянні з переважною опорою на кожну з нижніх кінцівок із наступним порівняльним аналізом проекцій загального центра мас на площині опори при одноопорному стоянні на правій та лівій кінцівках відносно сагітальної площини, яка проходить через центр проекції загального центра мас при двохопорному стоянні,...
Спосіб непрямої оцінки функціонального стану опорно-рухового апарату людини
Номер патенту: 62170
Опубліковано: 15.12.2003
Автори: Мітелев Дмитро Анатолійович, Карпінський Михайло Юрійович, Радченко Володимир Олександрович, Левшин Олександр Анатолійович, Тяжелов Олексій Алимович, Суббота Ігор Анатолійович
МПК: A61B 5/103
Мітки: опорно-рухового, непрямо, людини, функціонального, стану, апарату, спосіб, оцінки
Формула / Реферат:
Спосіб непрямої оцінки функціонального стану опорно-рухового апарату людини, що заснований на розташуванні пацієнта на статографі, виконанні пацієнтом на ньому першого кроку, реєстрації статограми першого кроку та наступному її аналізі, який відрізняється тим, що на статограмі наносять лінію, яка проходить через точку початку руху і паралельна проекції фронтальної площини, визначають взаємне розташування криволінійного відрізка траєкторії...
Спосіб визначення ступеня тяжкості патологічного стану опорно-рухового апарату
Номер патенту: 12992
Опубліковано: 15.03.2006
Автори: Сідельникова Тетяна Андріївна, Єрмоленко Тетяна Олексіївна, Мардашко Олексій Олексійович, Кузьміна Алла Володимирівна, Кузьмін Віктор Євгенович, Ігнат'єв Олександр Михайлович, Бацуля Людмила Олексіївна
МПК: A61B 10/00
Мітки: ступеня, апарату, визначення, патологічного, спосіб, тяжкості, стану, опорно-рухового
Формула / Реферат:
Спосіб визначення ступеня тяжкості патологічного стану опорно-рухового апарату, що включає вимір щільності кісткової тканини, який відрізняється тим, що визначають швидкість проходження ультразвукового імпульсу крізь кісткову тканину, вагу та зріст пацієнта, будують на основі одержаних даних класифікаційне дерево рішень та за ієрархічною його будовою визначають ступінь патології кісткової тканини, а саме: при умовному позначенні патології...
Спосіб виявлення порушень кінематичної функції опорно-рухового апарату людини за допомогою телемедичних систем
Номер патенту: 62560
Опубліковано: 12.09.2011
Автори: Климовицький Володимир Гаррійович, Владзимирський Антон Вячеславович, Попова Тетяна Валеріївна
МПК: A61B 5/11
Мітки: телемедичних, функції, порушень, допомогою, апарату, виявлення, спосіб, опорно-рухового, кінематичної, систем, людини
Формула / Реферат:
Спосіб виявлення порушень кінематичної функції опорно-рухового апарату людини, при якому здійснюють визначення взаємних положень опорних структур, які мають вирішальну роль в формуванні біомеханіки опорно-рухового апарату, у положенні стоячи та при нахилі тулуба при використанні телемедичних систем.
Спосіб непрямого виявлення осередку ураження, наприклад опорно-рухового апарату людини
Номер патенту: 67108
Опубліковано: 15.06.2004
Автори: Яковенчук Наталія Миколаївна, Суббота Ігор Анатолійович, Карпінський Михайло Юрійович, Бірюков Андрій Андрійович, Хвисюк Олександр Миколайович
МПК: A61B 5/05
Мітки: апарату, спосіб, ураження, людини, виявлення, наприклад, опорно-рухового, непрямого, осередку
Формула / Реферат:
Спосіб непрямого визначення осередку ураження, наприклад опорно-рухового апарату людини, що включає пальпацію відповідних ділянок тіла та реєстрацію больового відчуття, який відрізняється тим, що пацієнта перед визначенням розташовують на статографі, реєструють спочатку фонову криву коливань загального центра його ваги без пальпації у фронтальній та сагітальній площинах, а потім - криву коливань загального центра ваги при пальпації...
Попередній патент: Спосіб визначення джерел метановиділення з підробленого масиву
Наступний патент: Спосіб виготовлення пружної призматичної шпонки
Випадковий патент: Вентилятор "парус"