Гідролокатор
Номер патенту: 88750
Опубліковано: 10.11.2009
Автори: Шличек Любов Іванівна, Клочан Валентина Іванівна, Донченко Світлана Іванівна, Гончар Анатолій Іванович, Клочан Юрій Анатолійович, Голод Олег Саулович

Формула / Реферат
Гідролокатор, що містить пристрій відображення інформації, пристрій обробки інформації, пристрій керування, формувач частоти запуску, формувач імпульсу запуску, підсилювач потужності, випромінюючу антену, першу й другу приймальні антени, перший і другий підсилювач-обмежник, фазовий детектор, керований фазообертач і подільник частоти, причому перший вихід пристрою керування з'єднаний з входом формувача частоти запуску, вихід формувача частоти запуску з'єднаний з входом формувача імпульсу запуску, вихід формувача імпульсу запуску з'єднаний з входом підсилювача потужності, вихід підсилювача потужності з'єднаний з входом випромінюючої антени, виходи першої й другої приймальних антен з'єднані з входами першого і другого підсилювача-обмежника відповідно, вихід першого підсилювача з'єднаний з першим входом фазового детектора, вихід другого підсилювача-обмежника з'єднаний з другим входом фазового детектора, вихід фазового детектора з'єднаний з сигнальним входом пристрою обробки інформації, керуючий вхід пристрою обробки інформації з'єднаний з другим виходом пристрою керування, вихід пристрою обробки інформації з'єднаний з входом пристрою відображення інформації, а керуючий вхід пристрою відображення інформації з'єднаний з третім виходом пристрою керування, при цьому вхід формувача імпульсу запуску з'єднаний з входом подільника частоти, вихід подільника частоти з'єднаний з входом керованого фазообертача, четвертий вихід пристрою керування з'єднаний з першим керуючим входом подільника частоти запуску, другий вхід керованого фазообертача з'єднаний з виходом другого підсилювача, а вихід керованого фазообертача з'єднаний з іншим входом фазового детектора, який відрізняється тим, що у нього введений підсилювач і пристрій вимірювання різниці миттєвих частот, причому вхід підсилювача підключений до виходу другої антени, вихід підсилювача з'єднаний з третім входом пристрою обробки інформації, перший вхід пристрою вимірювання різниці миттєвих частот підключений до виходу першого підсилювача-обмежника, другий його вхід підключений до виходу другого підсилювача-обмежника, а вихід - до четвертого входу пристрою обробки інформації.
Текст
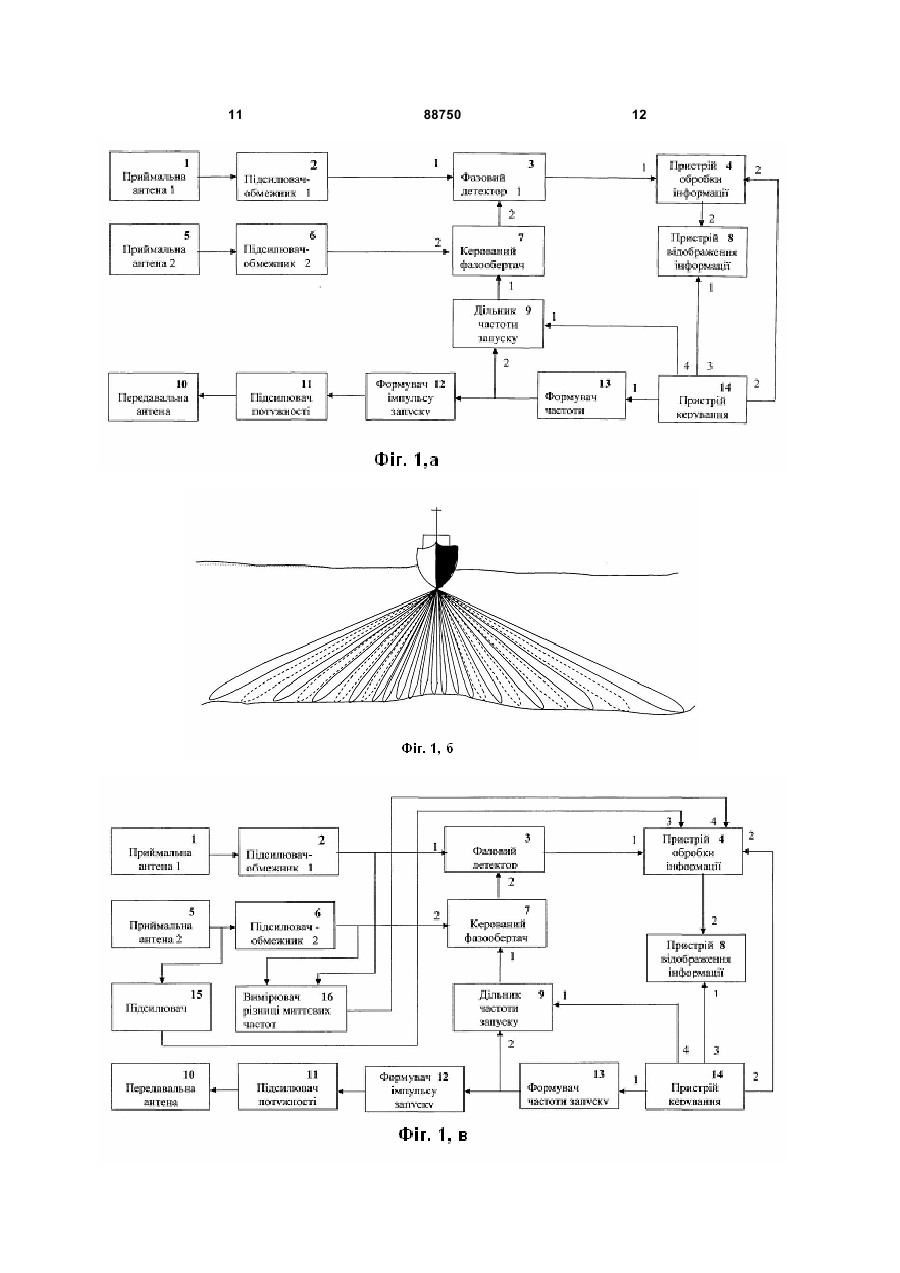
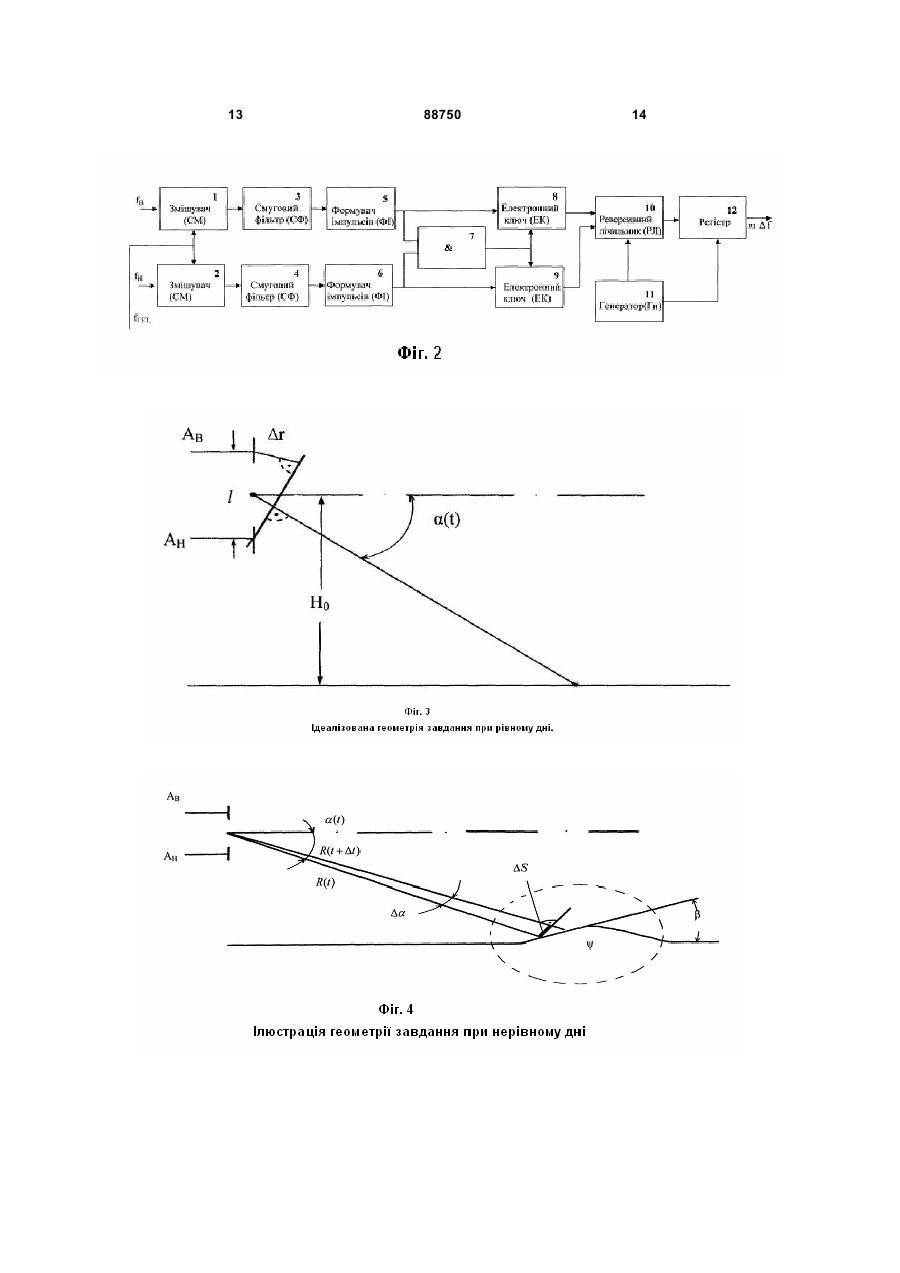
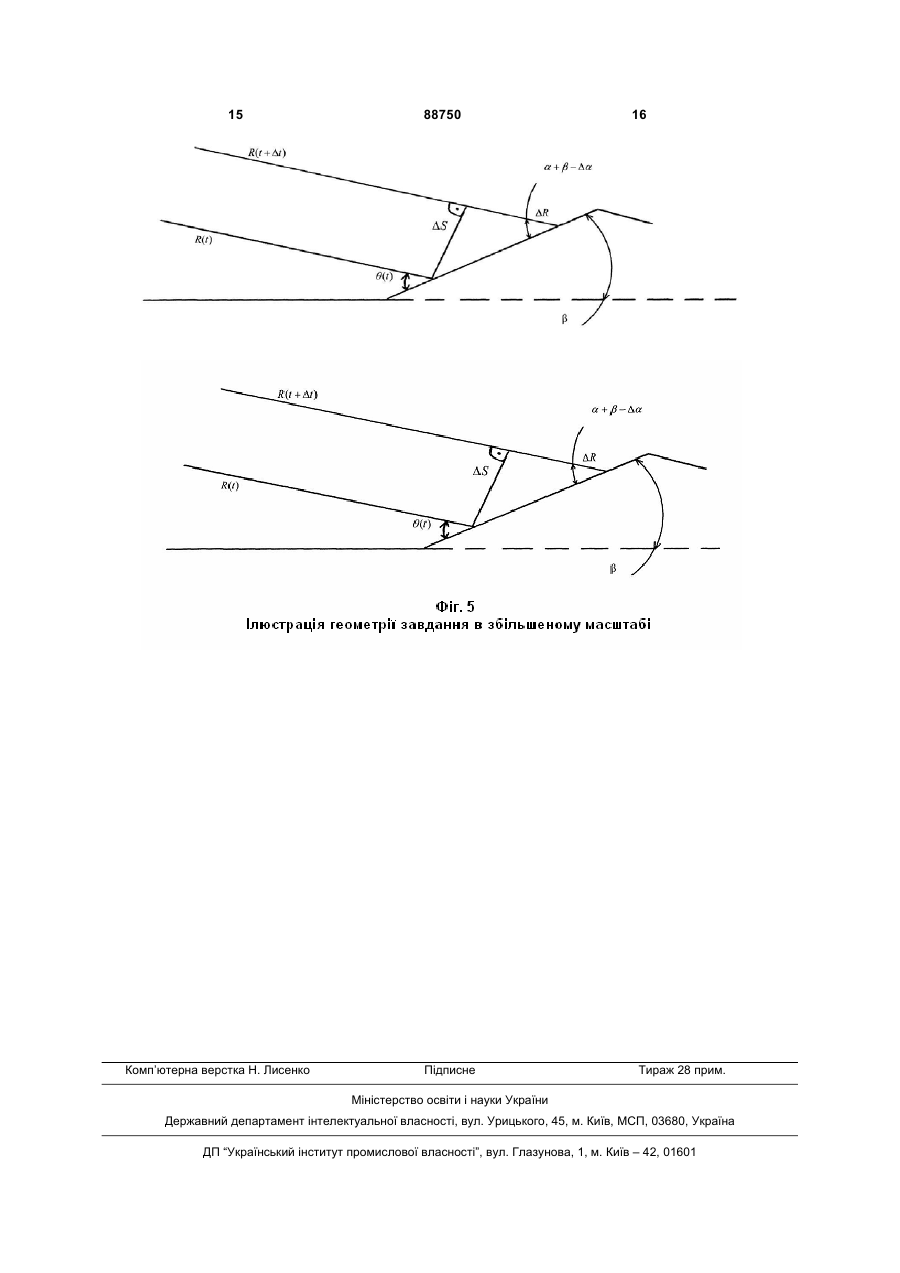
Гідролокатор, що містить пристрій відображення інформації, пристрій обробки інформації, пристрій керування, формувач частоти запуску, формувач імпульсу запуску, підсилювач потужності, випромінюючу антену, першу й другу приймальні антени, перший і другий підсилювачобмежник, фазовий детектор, керований фазообертач і подільник частоти, причому перший вихід пристрою керування з'єднаний з входом формувача частоти запуску, вихід формувача частоти запуску з'єднаний з входом формувача імпульсу запуску, вихід формувача імпульсу запуску з'єднаний з входом підсилювача потужності, вихід підсилювача потужності з'єднаний з входом випромінюючої антени, виходи першої й другої приймальних антен з'єднані з входами першого і другого підси C2 2 (11) 1 3 88750 комутатор, передавальний тракт, приймальнопідсилювальний тракт, пристрій обробки інформації, пристрій відображення інформації й пристрій керування, причому вихід антени гідролокатора бокового огляду через антенний комутатор, підключений до виходу передавального тракту і входу приймально-підсилювального тракту, перший, другий, третій, четвертий й п'ятий керуючі виходи пристрою керування з'єднані з керуючими входами передавального тракту, приймальнопідсилювального тракту, пристрою обробки й пристрою відображення інформації, вихід приймально-підсилювального тракту з'єднаний через пристрій обробки з входом пристрою відображення інформації. Характеристика направленості антени гідролокатора бокового огляду широка (≈40-60)° у вертикальній площині й вузька (≈1-2)° у горизонтальній площині, орієнтована під прямим кутом до напрямку руху судна. При цьому огляд і реєстрація зображення елементів звукорозсіюючого середовища в товщі води та донної поверхні здійснюється в прямокутній системі координат (похила дальність - шляхова дальність). Недоліком даного пристрою є відсутність можливості вимірювання глибини осторонь від судна. Відомі також гідролокатори бокового огляду (А.В.Говоров, Б.М.Малахов, В.П.Терехов. Гидролокационная аппаратура для площадной съемки дна и ее применение для целей картографирования. Сб. научных трудов ЦНИИ геодезии, аэросъемки и картографирования им. Ф.Н.Красовского. Вып. 238, М., 1985), які призначені для гідролокаційної зйомки донної поверхні й складаються з двох вертикально рознесених на відстань d антен, у силу чого, через ефект інтерференції ревербераційних сигналів, мають багатопелюсткову характеристику направленості в кутомісній площини виду ⎛ πd ⎞ R(θ ′) = cos⎜ sin θ ′ ⎟R 1 (θ ′) (1) ⎝ λ ⎠ Напрямок максимумів визначається формулою λ sin θ n = n, (2) d де n=0, 1, 2,..., N-1, N - ціла частина відношення d/λ. При відповідному виборі відношення d/λ можна одержати кілька інтерференційних смуг, які відповідають різниці фаз сигналів φ-2πn. Кожна інтерференційна смуга відповідає певному куту ковзання акустичного променя. Похила дальність до інтерференційної смуги визначається часом приходу ехо-сигналів Тн (або по шкалі реєстратора), глибина λ X( t ) = zn = rn sinθn = rn n, (3) d горизонтальне відстояне 2 ⎛λ ⎞ Y( t ) = rn cos θn = rn 1 − ⎜ n ⎟ , ⎝d ⎠ (4) і визначення координат (х, у) зводиться до виміру похилих відстаней 4 rn = cTn (5) , 2 де с - швидкість поширення звуку у воді, і визначенню номера смуги. Гідролокатор, що містить в собі пристрій відображення інформації, пристрій обробки інформації, пристрій керування, формувач частоти запуску, формувач імпульсу запуску, підсилювач потужності, випромінюючу антену, першу й другу приймальні антени, перший і другий підсилювачобмежник, фазовий детектор, причому перший вихід пристрою керування з'єднаний з входом формувача частоти запуску, вихід формувача частоти запуску з'єднаний із входом формувача імпульсу запуску, вихід формувача імпульсу запуску з'єднаний з входом підсилювача потужності, вихід підсилювача потужності підключений до входу випромінюючої антени, виходи першої й другої приймальної антени з'єднані з входами першого й другого підсилювача-обмежника відповідно, вихід першого підсилювача з'єднаний з першим входом фазового детектора, вихід другого підсилювачаобмежника з'єднаний з другим входом фазового детектора, вихід фазового детектора з'єднаний з сигнальним входом пристрою обробки інформації, керуючий вхід пристрою обробки інформації з'єднаний з другим виходом пристрою керування, вихід пристрою обробки інформації з'єднаний з входом пристрою відображення інформації, а керуючий вхід пристрою відображення інформації з'єднаний з третім виходом пристрою керування. Недоліком даного інтерферометричного гідролокатора є нерівномірність розрізнювальної здатності по дальності (нерівномірність розташування інтерференційних смуг по горизонтальній похилій дальності), що призводить в районі обстеження дна, особливо в дальній зоні, до великого розносу між інтерференційними смугами і, відповідно, до зменшення загальної розрізнювальної здатності по дальності і відсутності можливості визначення кута між розсіюючою площадкою дна та падаючим променем, необхідного для оцінки розсіюючих властивостей дна. Найбільш близьким до запропонованого пристрою є інтеферометричний гідролокатор, що описується в у патенті на винахід України №79032 (заявл. 10.05.2007р.). У даний інтерферометр, що включає пристрій відображення інформації, пристрій обробки інформації, пристрій керування, формувач частоти запуску, формувач імпульсу запуску, підсилювач потужності, випромінюючу антену, першу й другу приймальні антени, перший і другий підсилювачобмежник, фазовий детектор, керований фазообертач і подільник частоти, причому перший вихід пристрою керування з'єднаний з входом формувача частоти запуску, вихід формувача частоти запуску з'єднаний з входом формувача імпульсу запуску, вихід формувача імпульсу запуску з'єднаний з входом підсилювача потужності, вихід підсилювача потужності включень з входом випромінюючої антени, виходи першої й другої приймальної антени з'єднані з входами першого й другого підсилювача-обмежника відповідно, вихід першого підсилювача з'єднаний з першим входом фазового 5 детектора, вихід другого підсилювача обмежника з'єднаний з другим входом фазового детектора, вихід фазового детектора з'єднаний з сигнальним входом пристрою обробки інформації, керуючий вхід пристрою обробки інформації з'єднаний з другим виходом пристрою керування, вихід пристрою обробки інформації з'єднаний з входом пристрою відображення інформації, а керуючий вхід пристрою відображення інформації з'єднаний з третім виходом пристрою керування, при цьому вхід формувача імпульсу запуску з'єднаний з входом подільника частоти, вихід подільника частоти з'єднаний з входом керованого фазообертача, четвертий вихід пристрою керування з'єднаний з першим керуючим входом подільника частоти запуску, другий вхід керованого фазообертача з'єднаний з виходом другого підсилювача, вихід керованого фазообертача з'єднаний з другим входом фазового детектора. У даному гідролокаторі розрізнювальна здатність поліпшується за рахунок введення циклічної, через одну посилку (почергової), зміни фазового зрушення у фазових каналах інтерферометра. У результаті чого відбувається циклічний просторовий зсув променів інтерферометра, що за 2 посилки еквівалентно подвоєнню кількості променів у сумарному віялі характеристики направленості (Фіг.1.а, Фіг.1.б). Недоліком даного гідролокатора є відсутність можливості оцінки розсіюючих властивостей дна. Метою винаходу є підвищення інформативності інтерферометричного гідролокатора за рахунок оцінки розсіюючих властивостей дна за допомогою визначення кута між розсіюючею площадкою дна й падаючим променем інтерферометричного гідролокатора. Поставлена мета досягається тим, що в гідролокатор, який містить в собі пристрій відображення інформації, пристрій обробки інформації, пристрій керування, формувач частоти запуску, формувач імпульсу запуску, підсилювач потужності, випромінюючу антену, першу й другу приймальну антени, перший і другий підсилювач-обмежник, фазовий детектор, керований фазообертач і подільник частоти, причому перший вихід пристрою керування з'єднаний з входом формувача частоти запуску, вихід формувача частоти запуску з'єднаний з входом формувача імпульсу запуску, вихід формувача імпульсу запуску з'єднаний з входом підсилювача потужності, вихід підсилювача потужності з'єднаний з входом випромінюючої антени, виходи першої й другої приймальних антен з'єднані з входами першого й другого підсилювача-обмежника відповідно, вихід першого підсилювача з'єднаний з першим входом фазового детектора, вихід другого підсилювача-обмежника з'єднаний з другим входом фазового детектора, вихід фазового детектора з'єднаний з сигнальним входом пристрою обробки інформації, керуючий вхід пристрою обробки інформації з'єднаний з другим виходом пристрою керування, вихід пристрою обробки інформації з'єднаний з входом пристрою відображення інформації, а керуючий вхід пристрою відображення інформації з'єднаний з третім виходом пристрою керування, при цьому вхід формувача імпульсу 88750 6 запуску з'єднаний з входом подільника частоти, вихід подільника частоти з'єднаний з входом керованого фазообертача, четвертий вихід пристрою керування з'єднаний з першим керуючим входом подільника частоти запуску, другий вхід керованого фазообертача з'єднаний з виходом другого підсилювача, вихід керованого фазообертача з'єднаний з другим входом фазового детектора, введені підсилювач і пристрій вимірювання різниці миттєвих частот, причому вхід підсилювача підключений до виходу другої антени, вихід підсилювача з'єднаний із третім входом пристрою обробки інформації, перший вхід пристрою виміру різниці миттєвих частот підключений до виходу першого підсилювача-обмежника, другий його вхід підключений до виходу іншого підсилювача-обмежника, а вихід до четвертого входу пристрою обробки інформації (Фіг.1.в). При цьому бажаний ефект: оцінка розсіюючих властивостей досягається за рахунок вимірювання кута між падаючим променем і елементом розрізнення площадки дна в інтерферометричному гідролокаторі бокового огляду, тому що для оцінки властивостей дна необхідно вимірювати не тільки інтенсивність зворотного розсіювання, але й кут між площадкою дна що розсіює, й падаючим променем. Разом з тім, вимірювання тільки кутових координат за допомогою інтерферометра не дає інформації про кутову орієнтацію роздільного елемента дна, тому що величина реального кута між падаючим променем і площадкою дна, що розсіює, в цьому випадку не оцінюється. Для пояснення суті завдання покажемо застосування інтерферометричного пеленгатора при вимірюванні потокового кута між падаючим променем і площадкою дна, що розсіює. Для наочності візьмемо найпростіший варіант геометрії завдання: інтерферометрична антена орієнтована паралельно рівному дну (Фіг.3.). Антена перебуває на відстані Но від дна, кут візування розсіюючого у цей момент часу t елемента дна щодо осі антени рівняється α(t). Антени рознесені у вертикальній площині на відстань l=kλ, де λ -довжина хвилі пеленгованого ехо-сигналу. Різниця фаз ∆φ(t) між сигналами, прийнятими антенами Ан і Ав інтерферометра описується співвідношенням: (1) ∆φ(t)= 2πksinα(t) Швидкість зміни різниці фаз ∆φ(t) визначитися як результат диференціювання виразу (1) за часом: d∆ϕ ( t ) dα ( t ) = 2πκ cos α ( t ) (2) dt dt c З трикутника на Фіг.3 видно R = t , і кут a(t) є: 2 2H0 α ( t ) = arcsin (2a) ct Тоді: dα ( t ) H0 1 =− = − tgα ( t ) 2 dt t (3) ⎛ ct ⎞ 2 t ⎜ ⎟ − H0 ⎝2⎠ 7 У випадку нерівного дна на дальності R(t) = 88750 ct 2 елементарна ділянка дна має кут нахилу βR. Поширення зондувального імпульсу уздовж ділянки дна, що має нахил βR, ілюструє Фіг.4. У момент часу t відстань до пеленгуємої діляct нки була R(t) = , кут візування α(t). Через ін2 тервал часу ∆t ехо-сигнал буде знаходитися від антени на відстані R+∆R, при цьому кут візування елемента зміниться на ∆α. На Фіг.5 зображене збільшення ∆R(t) й викликане ним збільшення α(t) в збільшеному масштабі. Замінивши дугу ∆S перпендикуляром до променя R+∆R, маємо ∆S=R·∆a≈∆Rtg(α+βR-∆α). Т.к. α+β>>∆α, то: ∆α ( t ) d α ( t ) 1 ≈ = − tg(α + βВ ) (4) ∆t dt t Із співставлення (3) і (4) явно, що швидкість зміни кута візування розсіюючого елемента дна визначається сумою кутів візування дна й нахилу дна, тобто кутом між променем і розсіюючою площадкою дна або кутом падіння променя на розсіюючу в цей момент ділянку дна. Для оцінки величини (α+βR) підставимо (4) в (2): d∆ϕ ( t ) 2πκ =− cos α ( t )tg(α + βR ) dt t (5) Як видно : d ∆ϕ ( t ) d [ϕH( t ) − ϕb ( t )], = dt dt де φн(t) й jb(t) - фази сигналів прийнятих відповідно нижньою й верхньою антенами інтерферометра. Тоді: d ∆ϕ ( t ) d ϕ H ( t ) d ϕ b ( t ) = − . dt dt dt Оскільки d ∆ϕ ( t ) = ω ( t ) = 2πf ( t ) , dt де f(t) - миттєва частота сигналу, то: dϕ ( t ) = 2π [fH ( t ) − fB ( t )] = 2π∆f ( t ) (6) dt де fH(t), fВ(t) - відповідно миттєві частоти сигналів, прийнятих нижньою й верхньою антенами інтерферометра; ∆f(t) - різниця миттєвих частот сигналів, прийнятих нижньою й верхньою антенами в момент часу t. Піставляючи (5) в (6) видно, що значення кута θ(t) між падаючим променем і площадкою дна: ⎡ t ⋅ ∆f ( t ) ⎤ θ ( t ) = α ( t ) + βR ( t ) = arctg⎢ (7) ⎥ ⎣ K cos α ( t ) ⎦ де βR(t) - кут нахилу ділянки дна, від якого в момент t приходить ехо-сигнал, α(t) - кут візування цієї ділянки дна, кут a(t)+βR(t)=θ(t) - кут падіння променя на дану розсіюючу площадку. Таким чином, вимірювання різниці миттєвих частот ∆f(t) сигналів, прийнятих антенами інтерферометра в момент часу t від ділянки дна, роз 8 ct від антени й одно2 часне вимірювання кута візування цієї ділянки дна α(t), дають можливість визначити кут падіння променя на дану площадку. Вимірювання кута візування α(t) розсіюючого елемента дна забезпечується відомими структурами інтерферометрів. Для виміру різниці миттєвих частот ∆f(t) може бути використаний пристрій, схема якого зображена на Фіг.2. Дані ознаки підвищують інформативність інтерферометрічного гідролокатора бокового огляду, забезпечуючи можливість оцінки розсіюючих властивостей дна за допомогою визначення кута між розсіюючою площадкою дна й падаючим променем інтерферометрічного гідролокатора. Фіг.1.а. - Структура побудови інтерферометра; Фіг.1.б. - Принцип дії прототипу; Фіг.1.в - Структура побудови запропонованого пристрою; Фіг.2 - Структурна побудова пристрою вимірювання різниці миттєвих частот; Фіг.3 - Ідеалізована геометрія завдання при рівному дні; Фіг.4 - Ілюстрація геометрії завдання при нерівному дні; Фіг.5 - Ілюстрація геометрії завдання в збільшеному масштабі; Гідролокатор, що заявляється, містить: приймальну антену 1, підсилювач-обмежник 2, фазовий детектор 3, пристрій обробки інформації 4, приймальну антену 5, підсилювач-обмежник 6, керований фазообертач 7, пристрій відображення інформації 8, подільник частоти запуску 9, передавальну антену 10, підсилювач потужності 11, формувач імпульсу запуску 12, формувач частоти запуску 13, пристрій керування 14, підсилювач 15, вимірник різниці миттєвих частот 16. При цьому перший вихід пристрою керування 14 з'єднаний з входом формувача частоти запуску 13, вихід формувача частоти запуску 13 з'єднаний з входом формувача імпульсу запуску 12 і входом подільника частоти запуску 9, вихід формувача імпульсу запуску 12 з'єднаний з входом підсилювача потужності 11, вихід підсилювача потужності 11 з'єднаний з входом передавальної антени 10, виходи приймальних антен 1 і 5 з'єднані з входами підсилювачів обмежників 2 і 6 відповідно, вихід підсилювача обмежника 2 з'єднаний з входом фазового детектора 3, вихід фазового детектора 3 з'єднаний з першим входом пристрою обробки інформації 4, вихід підсилювача обмежника 6 з'єднаний з першим входом керованого фазообертача 7, другий вхід фазообертача 7 з'єднаний з виходом подільника частоти запуску 9, вихід керованого фазообертача 7 з'єднаний з другим входом фазового детектора З, другий вихід пристрою керування 14 з'єднаний з керуючим входом 1 пристрою відображення інформації 8, другий вхід пристрою відображення інформації 8 з'єднаний з виходом пристрою обробки інформації, третій вихід пристрою керування 14 з'єднаний з другим входом пристрою обробки інформації, четвертий вихід пристрою керування 14 з'єднаний з керуючим входом підси ташованої на відстані R(t) = 9 лювача частоти запуску 9, вхід підсилювача 15 підключений до виходу другої антени 5, вихід підсилювача 15 з'єднаний з третім входом пристрою обробки інформації 4, перший вхід пристрою виміру різниці миттєвих частот 16 підключений до виходу першого підсилювача-обмежника 2, другий його вхід підключений до виходу другого підсилювача-обмежника 6, а вихід до четвертого входу пристрою обробки інформації 4. Передавальна антена 10 - гідроакустична передавальна антена з широкою (≈40-60)° характеристикою направленості в одній площині й вузькою (≈1-2)° характеристикою направленості в іншій площині, орієнтованими вниз по напрямку до дна. Підсилювач-обмежник 2 і 6 виконує типове завдання по частотній селекції, посиленню й обмеженню ревербераційних сигналів. Фазовий детектор 3 - пристрій для виділення фазового зсуву вхідних сигналів. Пристрій обробки інформації 4 - робить статистичну обробку прийнятих сигналів. Приймальні антени 1 і 5 - гідроакустичні приймальні антени, призначені для прийому гідроакустичних сигналів і рознесені в просторі на відстань d/λ з широкою (≈40-60)° характеристикою направленості в одній площині й вузькою (≈1-2)° характеристикою направленості в іншій площині орієнтованими по вниз напрямку до дна. Керований фазообертач 7-пристрій, за допомогою якого можна змінити зсув фази сигналу від 0 до 180° ( електричне коло, в якому фаза напруги на виході зрушується відносно фази напруги на вході на задане значення). Пристрій відображення інформації 8 - являє собою кольоровий відеотермінал (дисплей). Подільник частоти запуску - цифровий логічний пристрій, який зменшує частоту вхідного сигналу в ціле число разів. Підсилювач потужності 11 - підсилює по потужності зондувальні сигнали. Формувач імпульсу запуску 12 - пристрій, формуючий зондувальний імпульсний сигнал. Формувач частоти запуску 13 - цифровий пристрій, який генерує періодичний сигнал із частотою запуску. Пристрій керування 14 - формує й видає синхронізуючі імпульси у формувач частоти запуску 13, у пристрій відображення інформації 8, пристрій відображення інформації 4, а також у подільник частоти запуску для виключення зміщеного пофазі інтерференційного сигналу в ближній зоні ехолокації. Гідролокатор, що заявляється, працює в такий спосіб: пристрій керування 14 формує синхроімпульс і подає його на входи пристрою відображення інформації 8, подільника частоти запуску 9, пристрою відображення інформації 4 і вхід формувача частоти запуску 13. З виходу формувача частоти запуску 13 безперервний тональний сигнал 88750 10 надходить на формувач імпульсу запуску 12. З виходу імпульсу запуску 12 сформований радіоімпульс подається на вхід підсилювача потужності 11, а посилений по потужності сигнал надходить на вхід гідроакустичної передавальної антени 10. Відбитий від морського дна ехо-сигнал надходить на входи приймальних антен 1 і 5, далі підсилюється - обмежується по амплітуді підсилювачами обмежниками 2 і 6, з виходу підсилювачаобмежника 2 сигнал надходить на перший вхід фазового детектора 3, з виходу підсилювачаобмежника 6 сигнал через керований фазообертач 7 надходить на другий вхід фазового детектора 3, з виходу фазового детектора 3 сигнал надходить на перший вхід пристрою обробки інформації 4, з виходу пристрою обробки сигналу 4 інформаційний сигнал надходить на другий вхід пристрою відображення інформації 8. Сигнал з виходу приймальної антени 5 підсилюється підсилювачем 15 і подається на третій вхід пристрою обробки інформації 4 для формування в ньому й відображення в пристрої 8 ехограми ділянки донної поверхні. Сигнали з виходів підсилювачів-обмежників 2 і 6 надходять відповідно на 1 і 2 входи вимірника різниці миттєвих частот 16, сигнал різниці миттєвих частот з якого подається на 4 вхід пристрою обробки інформації 4, де використовує в алгоритмі визначення кута між розсіюючою площадкою дна й падаючим променем інтерферометричного гідролокатора. Принцип роботи вимірника різниці миттєвих частот наданий на Фіг.2. Сигнали з входів каналів верхньої й нижньої антен надходять на змішувачі (CM) 1 і 2, де вони переносяться в область високих частот, далі фільтруються смуговими фільтрами (СФ) 3 і 4, перетворюються формувачами імпульсів (ФІ) 5 і 6 у послідовність імпульсів і через електронні ключі (ЕК) 8 і 9 надходять на підсумовуючий і віднімаючий вхід реверсивного лічильника (РЛ) 10, у лічильник по установчих входах записане число, рівне половині ємності лічильника 10. Цей лічильник 10 обнуляється періодично імпульсами генератора (Гн) 11 через інтервали часу, дорівнюючи тривалості зондуючого імпульсу. Перед скиданням лічильника 10 його показання фіксуються в регістрі 12, вони у відповідному масштабі дорівнюють вимірюваній величині ∆f/(x). Щоб виключити збої в лічильнику імпульсів 10, які водночас надходять на різні входи лічильника, у пристрої використана схема И 7, яка закриває електронні ключі (ЕК) 8 і 9. Запропонований гідролокатор вигідно відрізняється від прототипу, тим, що дозволяє підвищити інформативність інтерферометричного гідролокатора за рахунок оцінки розсіюючих властивостей дна за допомогою визначення кута між розсіюючою площадкою дна є й падаючим променем інтерферометричного гідролокатора. 11 88750 12 13 88750 14 15 Комп’ютерна верстка Н. Лиcенко 88750 Підписне 16 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSonar
Автори англійськоюHolod Oleh Saulovych, Honchar Anatolii Ivanovych, Donchenko Svitlana Ivanivna, Klochan Yurii Anatoliiovych, Klochan Valentyna Ivanivna, Shlychek Liubov Ivanivna
Назва патенту російськоюГидролокатор
Автори російськоюГолод Олег Саулович, Гончар Анатолий Иванович, Донченко Светлана Ивановна, Клочан Юрий Анатолиевич, Клочан Валентина Ивановна, Шличек Любовь Ивановна
МПК / Мітки
МПК: G01V 1/38, G01S 15/00
Мітки: гідролокатор
Код посилання
<a href="https://ua.patents.su/8-88750-gidrolokator.html" target="_blank" rel="follow" title="База патентів України">Гідролокатор</a>
Гідролокатор бокового огляду

Номер патенту: 71068
Опубліковано: 15.11.2004
Автори: Клочан Валентина Іванівна, Клочан Юрій Анатолійович
МПК: G01V 1/38, G01S 15/00
Мітки: бокового, огляду, гідролокатор
Формула / Реферат:
Гідролокатор бокового огляду, що містиь приймально-випромінюючу антену, передавальний тракт, формувач основного зондуючого імпульсу, приймальний тракт, формувач часового автоматичного регулювання підсилення ехосигналу, блок оперативної пам'яті обробки основного зондуючого імпульсу, пристрій керування, формувач синхроімпульсу, пристрій відображення інформації, причому вихід передавального тракту з'єднаний з виводом приймально-випромінюючої...
Фазовий гідролокатор бокового огляду
Номер патенту: 74686
Опубліковано: 16.01.2006
Автори: Гончар Анатолій Іванович, Клочан Юрій Анатолійович, Клочан Валентина Іванівна
МПК: G01V 1/38, G01S 15/00
Мітки: фазовий, гідролокатор, бокового, огляду
Формула / Реферат:
Фазовий гідролокатор бокового огляду, який містить формувач основного зондуючого імпульсу, передавальний тракт, випромінюючу антену, першу і другу приймальні антени, перший і другий приймальні тракти, перший і другий смугові фільтри, фазовий детектор, фільтр низьких частот, пристрій відображення інформації і пристрій керування, причому вихід передавального тракту з'єднаний з виходом випромінюючої антени, вихід першої приймальної антени...
Інтерферометр
Номер патенту: 79032
Опубліковано: 10.05.2007
Автори: Клочан Валентина Іванівна, Гончар Анатолій Іванович, Клочан Юрій Анатолійович
МПК: G01V 1/38, G01S 13/66, G01S 15/00
Мітки: інтерферометр
Формула / Реферат:
Інтерферометр, що містить пристрій відображення інформації, пристрій керування, формувач частоти запуску, формувач імпульсу запуску, підсилювач потужності, передавальну антену, першу і другу приймальні антени, перший і другий підсилювачі-обмежники, фазовий детектор і пристрій обробки інформації, причому перший вихід пристрою керування з'єднаний із входом формувача частоти запуску, вихід формувача частоти запуску з'єднаний із входом формувача...
Пристрій для лікування логоневрозу
Номер патенту: 44854
Опубліковано: 15.03.2002
Автор: Кубай Роман Іванович
МПК: A61F 5/58
Мітки: логоневрозу, пристрій, лікування
Формула / Реферат:
Пристрій для лікування логоневрову, який містить мікрофон з'єднаний з входом блока керування, блок затримки, електростимулятор, вихід якого з'єднаний з електродами, який відрізняється тим, що в блок керування введені перший підсилювач, перший формувач імпульсів, логічний елемент 2 "І", логічний елемент 2 "АБО", датчик ритму серця, другий підсилювач, другий формувач імпульсів, а в блок затримки входять одновібратор і...
Пристрій для вимірювання короткочасної нестабільності частоти
Номер патенту: 68370
Опубліковано: 16.08.2004
Автори: Клейман Олександр Самуїлович, Тимофеєв Євген Петрович
МПК: G01R 23/00
Мітки: нестабільності, вимірювання, пристрій, короткочасної, частоти
Формула / Реферат:
Пристрій для вимірювання короткочасної нестабільності частоти, що складається з послідовно з’єднаних фазового детектора, підсилювача, перестроюваного фільтра верхніх частот і вимірювача середньоквадратичного значення напруги, а також кола фазового автопідстроювання частоти опорного генератора, який відрізняється тим, що в нього додатково введені регульований підсилювач, ввімкнений в коло фазового автопідстроювання, вольтметр, ввімкнений на...
Попередній патент: Спосіб прогнозування розриву серця при гострому інфаркті міокарду
Наступний патент: Спосіб діагностики загрози дестабілізації перебігу ішемічної хвороби серця при негоспітальній пневмонії в осіб, інфікованих chlamydophila pneumoniae
Випадковий патент: Спосіб нагрівання повітронагрівача доменної печі