Спосіб навчання льотного і інженерно-технічного складу транспортних засобів, переважно повітряних
Номер патенту: 89900
Опубліковано: 10.03.2010
Автори: Матвієвський Олександр Миколайович, Лушніченко Володимир Миколайович, Бих Олександр Іванович, Бих Іван Олександрович, Матвієвський Микола Олександрович

Формула / Реферат
1. Спосіб навчання льотного і інженерно-технічного складу транспортних засобів, переважно повітряних, що включає розміщення в учбовому приміщенні тренажера у складі кабіни екіпажа, робочого місця інструктора, системи візуалізації, багатокомп'ютерного обчислювального комплексу з процесором і блоком із спеціалізованим програмним забезпеченням, імітатора авіаційних шумів і мовних повідомлень та системи електроживлення, введення до складу багатокомп'ютерного обчислювального комплексу реєстратора польотної інформації, а також блока моделювання різноманітних учбових ситуацій з пристроєм обчислення розв'язувальних рівнянь математичної моделі динаміки просторового руху центру мас транспортного засобу і його систем, та подальше моделювання на основі тренажера різноманітних учбових ситуацій, що включають виконання основних експлуатаційних режимів, відпрацювання дій в особливих випадках і основних задач бойового застосування, який відрізняється тим, що як реєстратор польотної інформації використовують аварійно-експлуатаційний реєстратор польотної інформації, який попередньо експлуатують в умовах реальних польотів реального транспортного засобу, під час яких до реєстратора польотної інформації вводять і записують дані об'єктивного контролю, після чого отриману інформацію використовують при експлуатації тренажерного транспортного засобу, а як вхідні дані для пристрою обчислення розв'язувальних рівнянь математичної моделі динаміки просторового руху центру мас транспортного засобу і його систем використовують дані об'єктивного контролю, що надходять з аварійно-експлуатаційного реєстратора польотної інформації, отримані під час реальних польотів реального транспортного засобу.
2. Спосіб за п. 1, який відрізняється тим, що як дані об'єктивного контролю використовують польотні дані, а також дані технічного стану систем, агрегатів і устаткування транспортного засобу, отримані в реальних умовах його експлуатації.
3. Спосіб за п. 1, який відрізняється тим, що як дані об'єктивного контролю використовують польотні дані, отримані в умовах реальних польотів реального транспортного засобу, з можливістю їх варіювання в кількості до 64 параметрів.
4. Спосіб за п. 1, який відрізняється тим, що використовують аварійно-експлуатаційний реєстратор польотної інформації з Flash-пам'яттю, який оснащують спеціальним програмним забезпеченням.
5. Спосіб за п. 1, який відрізняється тим, що аварійно-експлуатаційний реєстратор польотної інформації одночасно використовують як навчальний так і як технічний засіб.
6. Спосіб за п. 1, який відрізняється тим, що використовують тренажер у складі нерухомої або рухомої кабіни екіпажа.
7. Спосіб за п. 1, який відрізняється тим, що аварійно-експлуатаційний реєстратор польотної інформації виконують з можливістю накопичення і збереження польотної інформації під час експлуатації чи у випадку настання аварії реального транспортного засобу.
Текст
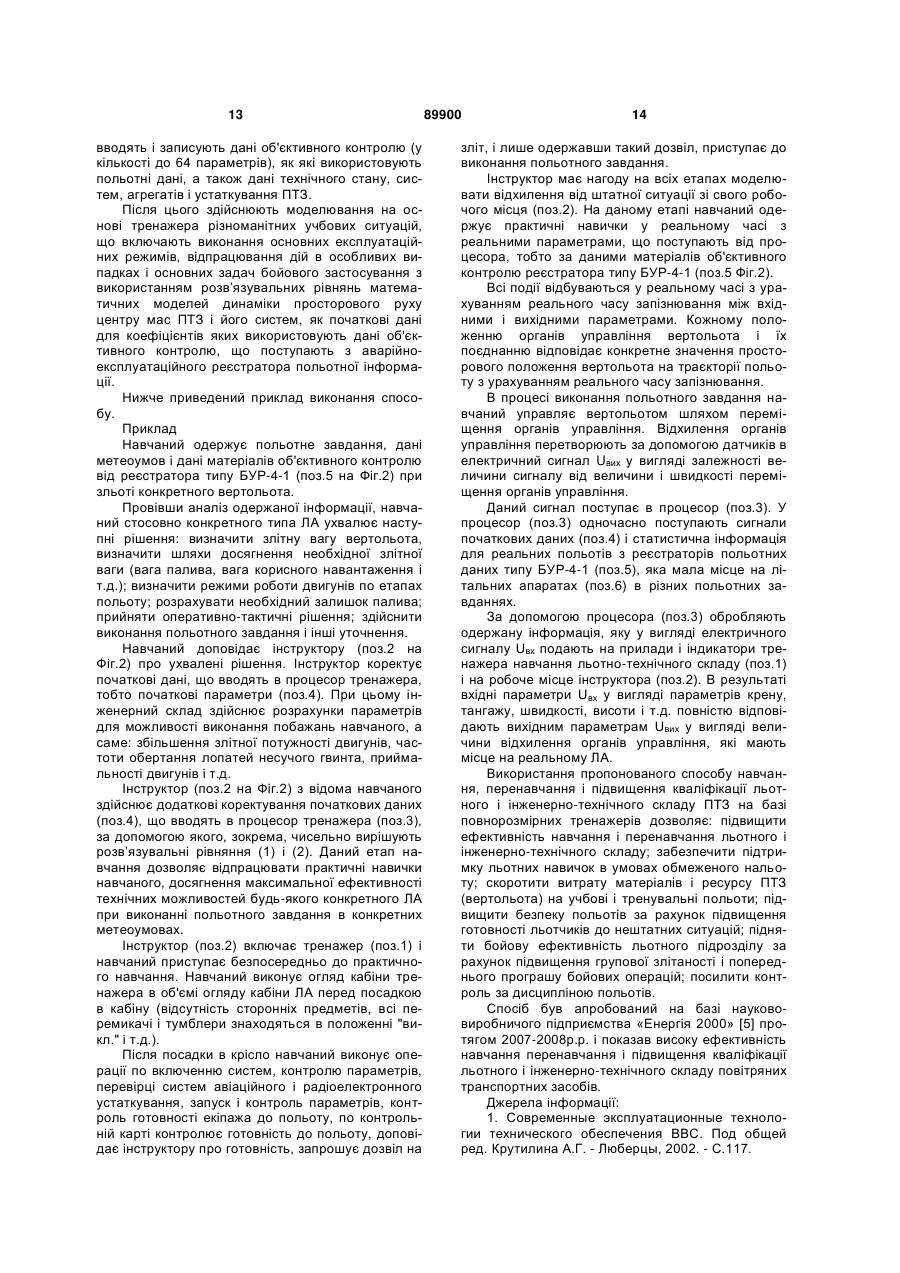
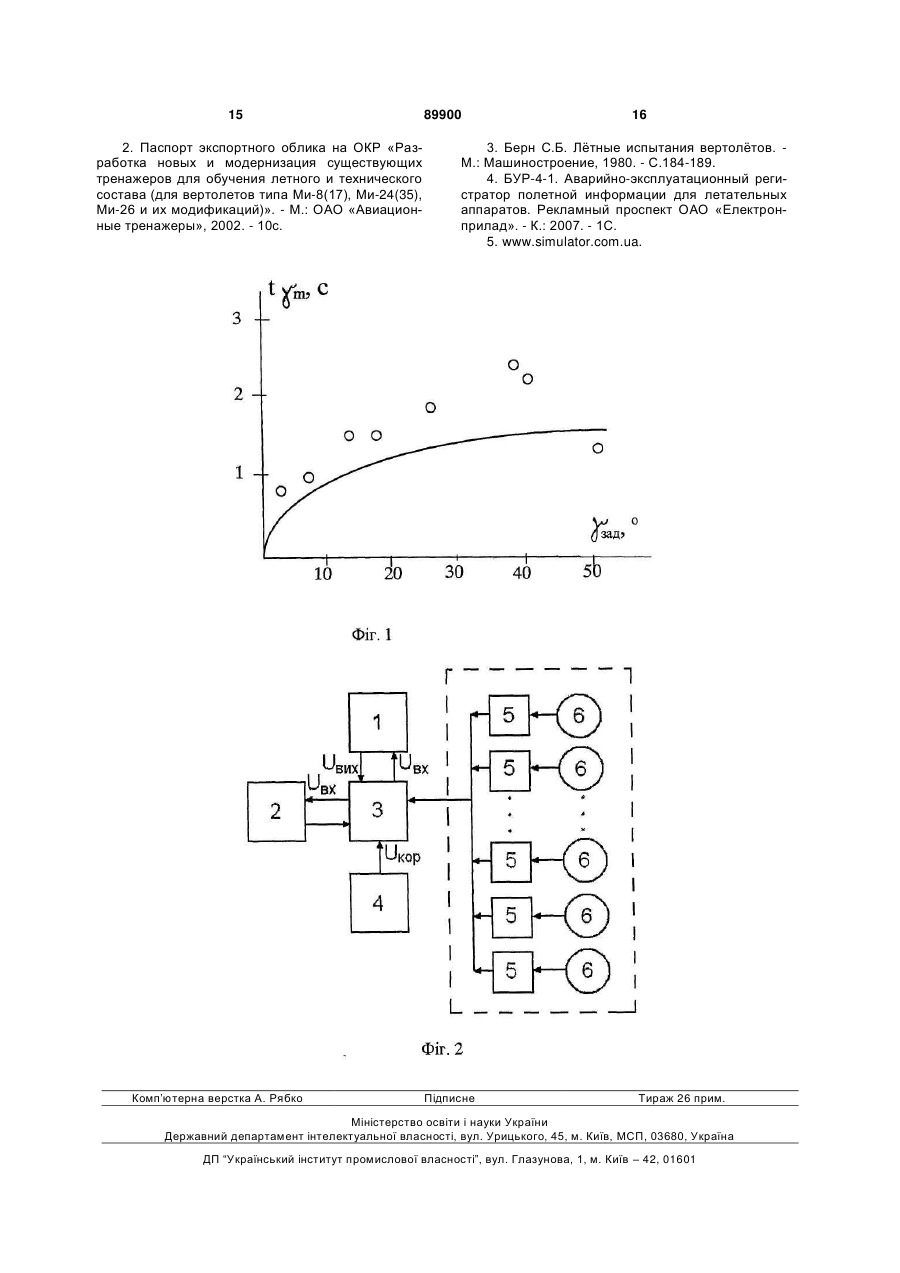
1. Спосіб навчання льотного і інженернотехнічного складу транспортних засобів, переважно повітряних, що включає розміщення в учбовому приміщенні тренажера у складі кабіни екіпажа, робочого місця інструктора, системи візуалізації, багатокомп'ютерного обчислювального комплексу з процесором і блоком із спеціалізованим програмним забезпеченням, імітатора авіаційних шумів і мовних повідомлень та системи електроживлення, введення до складу багатокомп'ютерного обчислювального комплексу реєстратора польотної інформації, а також блока моделювання різноманітних учбових ситуацій з пристроєм обчислення розв'язувальних рівнянь математичної моделі динаміки просторового руху центру мас транспортного засобу і його систем, та подальше моделювання на основі тренажера різноманітних учбових ситуацій, що включають виконання основних експлуатаційних режимів, відпрацювання дій в особливих випадках і основних задач бойового застосування, який відрізняється тим, що як реєстратор польотної інформації використовують аварійно-експлуатаційний реєстратор польотної інформації, який попередньо експлуатують в умо 2 (19) 1 3 Винахід відноситься до способів навчання, перенавчання і підвищення кваліфікації льотного і інженерно-технічного складу транспортних засобів, переважно повітряних (ПТЗ), на базі повнорозмірних тренажерів. Відомий спосіб навчання льотного і інженернотехнічного складу транспортних засобів на базі використання спеціалізованих комп'ютерних підручників, що вибраний як аналог [1]. Недолік способу аналога - низька ефективність навчання і перенавчання навчаних, а також відпрацювання дій в особливих умовах і основних задач бойового застосування, унаслідок проведення навчальних тренувань в умовах, віддалених від реальних умов проведення польотів і експлуатаційних режимів. Як найближчий аналог вибраний спосіб навчання льотного і інженерно-технічного складу ПТЗ з використанням інтелектуальних навчальних систем на базі повнорозмірного тренажера, що включає розміщення в учбовому приміщенні тренажера у складі кабіни екіпажа, робочого місця інструктора, системи візуалізації, багатокомп'ютерного обчислювального комплексу із спеціалізованим програмним забезпеченням, імітатора авіаційних шумів і мовних повідомлень, а також системи електроживлення, з подальшим моделюванням на основі тренажера різноманітних учбових ситуацій, що включають виконання основних експлуатаційних режимів, відпрацювання дій в особливих випадках і основних задач бойового застосування з використанням розв’язувальних рівнянь математичної моделі динаміки просторового руху центру мас транспортного засобу і його систем з апріорі вводимими даними для коефіцієнтів розв’язувальних рівнянь [2]. Недолік способу найближчого аналога - низька ефективність навчання і перенавчання навчаних, а також відпрацювання дій в особливих умовах і основних задач бойового застосування, унаслідок проведення навчальних тренувань в умовах, віддалених від реальних умов проведення польотів і експлуатаційних режимів, малої достовірності використовуваних для навчання апріорі вводимих даних для коефіцієнтів розв’язувальних рівнянь математичної моделі динаміки просторового руху транспортного засобу і його систем, а також відсутності фактичних тимчасових реакцій транспортного засобу (вертольота) на переміщення органів управління ним. В основу винаходу поставлена задача підвищення ефективності способу навчання, перенавчання і підвищення кваліфікації льотного і інженерно-технічного складу ПТЗ на базі тренажерів шляхом введення до складу повнорозмірних тренажерів додаткових технічних і навчальних засобів, а також підвищення достовірності математичного моделювання динаміки просторового руху центру мас ПТЗ і його систем при проведенні навчальних тренувань в умовах, максимально наближених до реальних умов проведення польотів і експлуатаційних режимів. Вказана задача вирішується тим, що у способі навчання льотного і інженерно-технічного складу 89900 4 транспортних засобів, переважно повітряних, на базі тренажерів, що включає розміщення в учбовому приміщенні тренажера у складі кабіни екіпажа, робочого місця інструктора, системи візуалізації, багатокомп'ютерного обчислювального комплексу із спеціалізованим програмним забезпеченням, імітатора авіаційних шумів і мовних повідомлень та системи електроживлення, з подальшим моделюванням на основі тренажера різноманітних учбових ситуацій, що включають виконання основних експлуатаційних режимів, відпрацювання дій в особливих випадках і основних задач бойового застосування з використанням розв’язувальних рівнянь математичної моделі динаміки просторового руху центру мас транспортного засобу і його систем, новим є те, що, до складу багатокомп'ютерного обчислювального комплексу тренажера додатково вводять аварійноексплуатаційний реєстратор польотної інформації, в який вводять і записують дані об’єктивного контролю, а як дані для коефіцієнтів розв’язувальних рівнянь математичної моделі динаміки просторового руху центру мас транспортного засобу і його систем використовують дані об'єктивного контролю, що поступають з аварійно-експлуатаційного реєстратора польотної інформації. Як дані об'єктивного контролю використовують польотні дані, а також дані технічного стану, систем, агрегатів і устаткування транспортного засобу. Як дані об'єктивного контролю використовують польотні дані в кількості до 64 параметрів. Використовують аварійно-експлуатаційний реєстратор польотної інформації з Flash-пам'яттю, який постачають спеціальним програмним забезпеченням. Аварійно-експлуатаційний реєстратор польотної інформації одночасно використовують як навчальний і як технічний засіб. Використовують тренажер у складі нерухомої або рухомої кабіни екіпажа. Відтворюють інтер'єр кабіни з штатним оснащенням реально використовуваного транспортного засобу. Забезпечують візуалізацію позакабінного простору на всіх режимах польоту повітряного транспортного засобу, наприклад, вертольота, з імітацією різноманітних тимчасових і погодних умов. Забезпечують поле огляду позакабінного простору повітряного транспортного засобу, наприклад, вертольота, в нижньобічному напрямі. Перераховані вище ознаки складають сутність винаходу. Наявність причинно-наслідного зв'язку між сукупністю істотних ознак винаходу і технічним результатом, що досягається, полягає в наступному. Відома в даний час система підготовки льотного і інженерно-технічного складу транспортних засобів (як наземних, так і повітряних) передбачає використання тренажерів в процесі навчання, відновлення і підвищення кваліфікації навчаних. На сучасних тренажерах імітація польоту ПТЗ (наприклад, літального апарату - ЛА) базується на використанні математичного моделювання руху 5 89900 центру мас ЛА, а саме розв’язувальних рівнянь різноманітних математичних моделей динаміки просторового руху центру мас транспортного засобу і його систем При цьому мала достовірність використовуваних математичних моделей динаміки просторового руху ПТЗ і його систем, що має місце в способах аналогах [1] і найближчого аналога [2], обумовлена наступними причинами. ПТЗ (вертоліт), як динамічна система, володіє рядом особливостей, до основних з яких можна віднести такі. В першу чергу необхідно відзначити динамічну нестійкість вертольота, потім - особливості несучої системи, відмінної тим, що вона є рухомою щодо фюзеляжу і виконує функції управління, зокрема - безпосередньо управляє підйомною силою. 6 До того ж несуча система вертольота є динамічною системою, що має запізнювання. Це призводить у ряді випадків до необхідності розглядати вертоліт як систему, що складається з декількох тіл. Сили і моменти, створювані несучою системою, які є визначальними серед аеродинамічних сил і моментів, діючих на вертоліт, не залежать від квадрата швидкості польоту, як у літака. Це не дає можливість при описі руху вертольота перейти до математичних рівнянь з безрозмірними коефіцієнтами. На вертольоті у значній мірі виявляється аеродинамічна взаємодія поздовжнього і бічного рухів. Так, найпростіша система рівнянь, що описує достатньо точно основні властивості вертольота як динамічної системи для зв'язаних осей, має вигляд [3]: m Vx k Vz k y Vy k z Rx G sin ; m Vy k Vx k z Vz k x Ry G cos cos ; m Vz k Vy k x Vx k y Rz G cos sin ; Jx x Jz y z Jy y Jz z Jy B Jx Jy Jy Jz Jx x x y y Jx y x Jx y y Jx y z y M x ; (1) z x My ; 2 y 2 x Mz ; My B де m - маса вертольота, кг, Vxk, Vyk, Vzk - складові прискорень зв'язаних осей ох, оу і oz, м/с2, Vzk y , Vxk z , Vyk x - складові швидкостей зв'язаних осей ох, оу і oz, м/с, Jx, Jу, Jz - моменти інерції зв'язаних осей ох, оу і oz, кг·м2, -1 х, у, z, x , y , z - кутові швидкості (с ) і їх похідні (с-2), Rx, Ry, Rz - складові рівнодіючої аеродинамічних сил, що діють на вертоліт, уздовж осей ох, оу і oz, Н, G - вага вертольота, кг, Мх, Му, Мz - складаючі крутильні моменти осей ох, оу і oz, Н·м, , і - кути між осями зв'язаної системи і земною системою координат, град; МуВ - сума крутильного моменту, створюваного лопатями несучого гвинта і моменту, створюваного силовою установкою, Н м; - кутове прискорення обертання лопатей несучого гвинта (с-2). Рівняння (1) одержані при наступних основних допущеннях: - елементи конструкції вертольота вважаються абсолютно жорсткими; - кути розмаху лопатей несучого гвинта змінюються миттєво і пропорційно зміні параметрів руху і відхилень органів управління; - зміни положення центру мас і величин моментів інерції від переміщення лопатей у пов'язаних з вертольотом осях не враховуються; - сили інерції фюзеляжу і його частин не враховуються. Оскільки проекції сили тяжіння залежать від кутів, що визначають орієнтацію вертольота щодо землі, то до системи рівнянь (1) необхідно додати співвідношення (2), що зв'язують кути , і з кутовими швидкостями х, y, z: y x sin tg z cos y cos z sin (2) 1 y cos x sin cos У результаті вертоліт розглядається як динамічна система, що складається з двох елементів. Перший елемент - це фюзеляж як тверде тіло, на яке діють сили і моменти, створювані фюзеляжем, і рівнодіючі сил і моментів несучого і хвостового гвинтів. Математична модель другого елементу вертольота описує обертання ланок несучої системи щодо валу гвинта. Отже, система диференціальних рівнянь (1), що характеризують рух вертольота, складається з шести рівнянь, що описують рух фюзеляжу як твердого тіла, і рівняння рівноваги моментів щодо осі валу несучого гвинта. Система, об'єднуюча розв’язувальні рівняння (1) і (2), складається з нелінійних диференціальних рівнянь, тому вирішувати її можна тільки чисельними методами на ПЕОМ. Унаслідок нелінійної 7 залежності сил і моментів, діючих на вертоліт, від ряду параметрів руху, ці системи не можна використовувати для опису руху центру мас і систем вертольота при великих змінах цих параметрів, що задаються апріорі, в процесі практичного навчання льотного і інженерно-технічного складу. Тому для вирішення практичних задач в процесі навчання апріорі вводять ряд спрощень, а саме враховують нелінійності, пов'язані із зміною тільки одного з параметрів руху. Це є вимушеною мірою і, як наслідок, одержані результати значно відрізняються від фактичних значень. Крім того, математичне моделювання в способах [1] і [2] не враховує час запізнювання між вхідними і вихідними параметрами, який реально коливається від 0,5 до 5с. Обертання ланок несучої системи щодо валу гвинта передбачає застосування обертальних координат, а вони є неголономними, тобто такими, що не інтегруються. Загальновідомо, що математичне моделювання руху центру мас ЛА до теперішнього часу залишається основним методом отримання вхідних параметрів руху для тренажерів ПТЗ. При цьому спрощення і неточності, а також відсутність в розрахунках сил інерції частин вертольота дає далеко не повну, з грубими (досягаючими одного порядку і більше) відхиленнями модельованих за способами [1] і [2] параметрів польоту від параметрів реального польоту вертольота. До того ж зв'язок у реальному часі вхідних (дія навчаного на органи управління) і вихідних параметрів (зміни напряму повної сумарної аеродинамічних сил) на тренажерах умовні, тобто не достовірні. Цим можна пояснити практичну однотипність усіх тренажерів, в яких відмінність між типами вертольотів створюється штучно, а саме шляхом введення в розв’язувальні рівняння руху вертольота (1) і (2) різноманітних суб'єктивних поправочних коефіцієнтів, що не враховують реальні режими польоту. Таким чином, модель руху (центру мас) вертольота при переміщенні органів управління ним в процесі математичного моделювання, при якому апріорі штучно вводять дані для коефіцієнтів розв’язувальних рівнянь руху вертольота (1) і (2), далека від реальності. Тому використання такого загальноприйнятого підходу за способами [1] і [2] не забезпечує якісної підготовки льотного і інженерно-технічного складу, підвищення льотної майстерності льотного складу, і дозволяє набути навчаним тільки первинних, але не стійких професійних навичок. Для усунення вищезгаданих невідповідностей і неточностей необхідно у реальному часі зв'язувати фактичні вхідні параметри руху органами управління, зовнішні дії і фактичні вихідні параметри (зміни сил і моментів), і на базі одержаних статистичних даних створювати статистично достовірну модель руху вивчаємого ЛА, тобто отримувати статистично достовірні дані для коефіцієнтів розв’язувальних рівнянь математичних моделей динаміки просторового руху центру мас транспортного засобу (ЛА) і його систем. У свою чергу, необхідність навчання льотного і інженерно-технічного складу вміло використовува 89900 8 ти матеріали об'єктивного контролю при підготовці до польотів на конкретному ЛА украй необхідна, оскільки вона дозволяє набути навички враховувати особливості кожного конкретного ЛА при виконанні різних польотних завдань в різних метеоумовах, в різних кліматичних умовах. Нами було встановлено, що для підвищення ефективності навчання як фактичні параметри у реальному часі для коефіцієнтів розв’язувальних рівнянь руху вертольота (1) і (2) можна використовувати дані об'єктивного контролю для конкретного типу ЛА На ЛА до теперішнього часу встановлювалися системи автоматичної реєстрації параметрів польоту типа САРПП-12 з можливістю запису 6 постійних параметрів і 9 разових команд, а також для збереження записаної інформації у разі механічного удару. Постійно записувалися наступні параметри: барометрична висота; приладова швидкість; крок несучого гвинта; обороти несучого гвинта; кут тангажу вертольота; кут крену вертольота. Всі вищезгадані записувані параметри є вихідними. До того ж вони не в повному об'ємі визначають просторове положення ЛА. В даний час створені реєстратори польотних даних з аналогічною метою (збір і збереження параметрів польоту), але кількість параметрів значно збільшена і значення записуваних параметрів у них можна варіювати. Так, на реєстраторі польотних даних типу БУР-4-1 існує можливість постійно записувати 32 параметри і 32 разові команди, тобто всього 64 даних [4]. Стало можливо задавати такі параметри, які точніше визначають просторове положення і еволюції вертольота, а також набувати поточні значення тиску, витрат і температур робочих рідин і газів в системах вертольота. До того ж ці реєстратори згідно розробленого способу, використовують з Flash-пам'яттю і постачають спеціальним програмним забезпеченням, а також використовують одночасно як навчальні і як технічні засоби. Так, наприклад, додатково можливо записувати поточні значення вертикального, поздовжнього і поперечного перевантажень не тільки в районі центральної частини фюзеляжу, але і в найвіддаленішій зоні - в районі рульового гвинта. Ці параметри украй необхідні при визначенні просторового положення фюзеляжу вертольота при його обертанні. Так, наприклад, наявність даних щодо тиску, витрат і температур в гідро-, мастильно-, паливній і повітряній системах дозволяє по величині і швидкості зміни параметрів визначити технічний стан систем в цілому і агрегатів зокрема. Математичне моделювання руху центру мас ПТЗ (вертольота) за способами [1] і [2] вимагає участі великого колективу програмістів і математиків, тоді як використання згідно пропонованої корисної моделі даних об'єктивного контролю дозволяє точніше, простіше і швидше виконати модель динаміки польоту вертольота (тобто одержати вхідні дані для дані для коефіцієнтів розв’язувальних рівнянь математичних моделей динаміки просторового руху центру мас транспор 9 тного засобу і його систем) і набагато меншим колективом обслуговуючого учбовий процес персоналу при одночасному підвищенні якості навчання. Крім того, за розробленим способом, повністю присутні фактичні тимчасові реакції вертольота на переміщення органів управління ним, відсутні при реалізації способів [1] і [2]. У свою чергу, використання аварійноексплуатаційного реєстратора польотної інформації з Flash-пам’яттю забезпечує автоматизацію польотної інформації ПТЗ та розширює функціональні можливості реєстратора. Спосіб ілюструється фігурами, де на Фіг.1 представлений характерний приклад залежності часу зміни кута крену t m (с) з оптимальною швидкодією від значення заданого кута крену t зад (град), одержаний по формулах (1) і (2) для одногвинтового вертольота; на Фіг.2 показана спрощена блоксхема тренажерного комплексу. На Фіг.2 прийняті наступні умовні позначення: 1 - тренажер; 2 - робоче місце інструктора; 3 - процесор зі спеціальним програмним забезпеченням; 4 - блок введення (коректування) початкових даних; 5 - аварійно-експлуатаційний реєстратор польотної інформації типу БУР 4-1; 6 - ЛА; Uвих параметри, відповідні величинам відхилення органів управління; Uвх - параметри, відповідні величинам просторового положення транспортного засобу; Uкор - параметри, що коректують початкові дані. З Фіг.1 видно істотну розбіжність фактичних даних (○) і модельних даних (––), одержаних по розв’язувальних рівняннях (1) і (2) унаслідок введення апріорі різноманітних суб'єктивних поправочних коефіцієнтів, що не враховують реальні режими польоту. Спосіб здійснюють таким чином. В учбовому приміщенні розміщують тренажерний комплекс (1) у складі кабіни (рухомої або нерухомої) екіпажа, робочого місця інструктора (2), системи візуалізації (на Фіг.2 не позначена), багатокомп'ютерного обчислювального комплексу із спеціалізованим програмним забезпеченням і процесором (3), імітатора авіаційних шумів і мовних повідомлень, системи електроживлення (на Фіг.2 не позначена), а також аварійноексплуатаційний реєстратор польотної інформації (5) типу БУР 4-1 з Flash-пам'яттю і спеціальним програмним забезпеченням. За допомогою реєстратора записують параметри руху органів управління і положення у просторі ЛА (6). Вищеописані засоби реєстрації і навчання базуються на єдиній програмній і апаратній технології, орієнтованої на застосування ІВМ-сумісних комп'ютерів. Це забезпечує високу надійність і простоту експлуатації і ремонту використовуваного в процесі навчання тренажерного комплексу. Для підвищення універсальності тренажера приладову індикацію реалізують засобами комп'ютерної графіки на дисплеях. Зображення позакабінної обстановки проектують на встановлений перед кабіною екран. Кабіну тренажера оснащують реальними важелями управління з відповідними системами завантаження і тримірування, встановлюють також 89900 10 панелі управління системами вертольота, необхідні для вирішення задач, на відпрацювання яких орієнтований тренажер. За допомогою використання тренажера забезпечують відпрацювання наступних дій навчаних: • передпольотну підготовку і контроль бортових систем на робочих місцях екіпажа; • підготовку до запуску, запуск і випробування двигунів; • рулювання по злітно-посадочній смузі і установку на курс зльоту; • техніку пілотування на всіх режимах в нормальних і ускладнених умовах виконання польоту з робочих місць льотчика і штурмана; • маршрутний політ по пілотажно-навігаційних приладах з використанням засобів приведення на аеродром посадки; • вертолітоводіння по запрограмованому і оперативно змінному маршруту; • пошук, виявлення, розпізнавання і ураження характерних наземних цілей комплексом некерованого озброєння, наземних, навідних і повітряних цілей комплексом керованого озброєння. За допомогою комплексних тренажерів здійснюють тренування льотного і інженерно-технічного складу в повністю реальному інтер'єрі кабіни, в реальному приладовому оточенні і з штатними панелями і важелями управління. Завдяки повному відтворенню інтер'єру кабіни з штатним оснащенням, реалізують ширші можливості для навчання льотного складу виконанню основних експлуатаційних режимів, відпрацювання дій в особливих випадках і основних задач бойового застосування. Інтер'єр кабіни в геометричному і функціональному значенні є точною копією кабіни вертольота, що конструктивно забезпечується наступними основним і альтернативними засобами: - використовується наявний списаний натурний вертоліт; - кабіна тренажера, що спеціально виготовляється по технічних вимогах, оснащується повним набором важелів, панелей, пультів, приладів, дисплеїв, світлосигнальних табло, крісел, що є в кабіні реального вертольота. Завдяки повному відтворенню інтер'єру кабіни з штатним оснащенням, крім перерахованих вище задач навчання, забезпечують відпрацювання наступних задач: • зависання і переміщення поблизу поверхні землі; • посадка по-вертолітному; посадка політаковому; • бойове маневрування на межі експлуатаційних обмежень; • закріплення навичок дій екіпажа в характерних особливих ситуаціях польоту, створюваних помилками пілотування і експлуатації авіаційної техніки, відмовами основних функціональних систем, дією на вертоліт атмосферних збурень і бойових засобів ураження; • спостереження і керівництво діями екіпажа, зміна тактичної повітряної і наземної обстановок, ускладнення умов виконання польоту, створення 11 персонах ситуацій польоту з робочого місця інструктора; • реєстрацію і експрес-аналіз управляючих дій екіпажа, звукову і візуальну видачу рекомендацій і попереджень екіпажу в реальному масштабі часу; • формування бази даних по рівню підготовки льотного складу. Умови розміщення тренажерного комплексу: 2 кондиційоване приміщення площею 25м , висота від підлоги до стелі 4,5м. Електроживлення: 110/220В, 380В, загальна потужність - 5кВт. Робоче місце інструктора (РМІ). РМІ оснащують імітаторами важелів управління вертолітного типу. РМІ забезпечує вирішення наступних основних задач: • формування сценаріїв тренування; • завдання умов польоту (початкові умови, польотне завдання, район і маршрут польоту, конфігурація, заправка, метеоумови і т.д.); • виконання функцій керівника польотів; • спостереження в ході тренування за вертольотом (вигляд збоку, траєкторія польоту на фоні карти місцевості, кутове положення на траєкторії); • візуалізація комп'ютеризованого експресаналізу управляючих дій екіпажа; • демонстрація навчаному особливостей пілотування, застосування керованого і некерованого озброєння, коректування його дій; • підігравання дій наземної цілі або вертольота-партнера; • введення імітованих відмов авіаційної техніки; • відтворення зареєстрованого "польоту"; • архівація результатів тренажу з подальшим зберіганням в базі даних і протоколюванням; • розбір результатів тренажу. Система візуалізації. За допомогою програми генерації зображення забезпечують візуалізацію позакабінного простору на всіх режимах польоту вертольота з імітацією всіляких тимчасових і погодних умов. При цьому імітують наступні об'єкти: • ландшафти (рівнини, горби, гори і т.п.), зокрема на основі цифрової картографії; • водні поверхні (морити, річки, озера); • рослинність (ліси, лісопосадки, окремо стоячі дерева); • будівельні об'єкти (дорогі, мости, міста, селища, укріпрайони); • райони аеродромів (злітно-посадкова смуга і руління, світлотехнічне устаткування, споруди); • рухомі об'єкти (літаки, кораблі, автомобілі, танки, ракети і ін.); • зміна представлення об'єктів (по дальності, після ураження авіаційними засобами ураження і ін.); спецефекти: • пори року, час доби, тип освітлення (яскраве сонце, розсіяне світло, посадочні фари); • хмарність (із зміною інтенсивності, верхньої і нижньої кромок); • туман, серпанок і дальність видимості від 0 до 20км; • дими, вибухи, сліди ракет і літаків, трасери куль; 89900 12 • одиночні і групові вогні постійного свічення, розсіяного і направленого випромінювання. Крім засобів синтезу позакабінної обстановки, важливим елементом системи візуалізації є оптичний тракт, що створює ілюзію віддаленості зображення на нескінченність. У пропонованих тренажерах він виконується в наступних варіантах: • На основі оптико-колімаційних пристроїв (ОКП), що є сферичним скляним дзеркалом + напівпрозоре скло в одно- і багатоканальному виконанні. Кути огляду по одному каналу складають 40° по горизонталі і 30° по вертикалі, рівень колімації - 100%. Конструкція ОКП володіє необхідною міцністю для установки на системи рухливості і припускає створення багатоканальних систем візуалізації з широким полем огляду по горизонталі, вертикалі і в нижньобічному напрямі. • На основі комп'ютерних DLP (Digital Micromimr Device) проекторів Кути огляду 40° по горизонталі і 30° по вертикалі по одному каналу, проекційна відстань складає 4-6м. Передбачена також можливість створення багатоканальних систем з оглядом в нижньобічному напрямі. Реалізація в пропонованих тренажерах огляду в нижньобічному напрямі необхідна саме для вертолітних тренажерів, оскільки забезпечує адекватне моделювання злітно-посадочних режимів, зависання і польоту на малих висотах. Обчислювальний комплекс. Обчислювальний комплекс формується на основі стандартних IBMсумісних технологій. Динамічний міжкомп’ютерний зв'язок в рамках одного тренажного комплексу реалізується за допомогою стандартних мережевих засобів в середовищі WINDOWS NT, що забезпечує необхідну для режиму реального часу швидкість передачі інформації. Для зв'язку аналогового і цифрового устаткування застосовують пристрій зв'язку устаткування. Багатофункціональні індикатори, що є на приладовій панелі і дисплеї, імітують стандартними кольоровими або монохромними дисплеями заданих розмірів і розрізняльної здатності, формування інформації для яких здійснюється за допомогою відповідних комп'ютерів. Спеціальне програмне забезпечення розроблене вітчизняним виробником [5] і включає з себе· математичну модель динаміки просторового руху вертольота і його систем, зокрема його силової установки; програмне забезпечення синтезу зображень позакабінної обстановки; програмне забезпечення середовища моделювання; програмне забезпечення імітації авіаційних шумів і мовних повідомлень; програмне забезпечення робочого місця інструктора. Імітатор авіаційних шумів і мовних повідомлень. Програмне забезпечення імітації шумів забезпечує моделювання наступних тривимірних звукових ефектів: запуск і робота двигуна на всіх режимах; пробіжка по смузі; посадка (удар коліс шасі об землю); аеродинамічний шум обертання несучого гвинта; застосування бортових засобів ураження; дія на вертоліт засобів ураження супротивника; мовні повідомлення. В процесі навчання в аварійноексплуатаційний реєстратор польотної інформації 13 вводять і записують дані об'єктивного контролю (у кількості до 64 параметрів), як які використовують польотні дані, а також дані технічного стану, систем, агрегатів і устаткування ПТЗ. Після цього здійснюють моделювання на основі тренажера різноманітних учбових ситуацій, що включають виконання основних експлуатаційних режимів, відпрацювання дій в особливих випадках і основних задач бойового застосування з використанням розв’язувальних рівнянь математичних моделей динаміки просторового руху центру мас ПТЗ і його систем, як початкові дані для коефіцієнтів яких використовують дані об'єктивного контролю, що поступають з аварійноексплуатаційного реєстратора польотної інформації. Нижче приведений приклад виконання способу. Приклад Навчаний одержує польотне завдання, дані метеоумов і дані матеріалів об'єктивного контролю від реєстратора типу БУР-4-1 (поз.5 на Фіг.2) при зльоті конкретного вертольота. Провівши аналіз одержаної інформації, навчаний стосовно конкретного типа ЛА ухвалює наступні рішення: визначити злітну вагу вертольота, визначити шляхи досягнення необхідної злітної ваги (вага палива, вага корисного навантаження і т.д.); визначити режими роботи двигунів по етапах польоту; розрахувати необхідний залишок палива; прийняти оперативно-тактичні рішення; здійснити виконання польотного завдання і інші уточнення. Навчаний доповідає інструктору (поз.2 на Фіг.2) про ухвалені рішення. Інструктор коректує початкові дані, що вводять в процесор тренажера, тобто початкові параметри (поз.4). При цьому інженерний склад здійснює розрахунки параметрів для можливості виконання побажань навчаного, а саме: збільшення злітної потужності двигунів, частоти обертання лопатей несучого гвинта, приймальності двигунів і т.д. Інструктор (поз.2 на Фіг.2) з відома навчаного здійснює додаткові коректування початкових даних (поз.4), що вводять в процесор тренажера (поз.3), за допомогою якого, зокрема, чисельно вирішують розв’язувальні рівняння (1) і (2). Даний етап навчання дозволяє відпрацювати практичні навички навчаного, досягнення максимальної ефективності технічних можливостей будь-якого конкретного ЛА при виконанні польотного завдання в конкретних метеоумовах. Інструктор (поз.2) включає тренажер (поз.1) і навчаний приступає безпосередньо до практичного навчання. Навчаний виконує огляд кабіни тренажера в об'ємі огляду кабіни ЛА перед посадкою в кабіну (відсутність сторонніх предметів, всі перемикачі і тумблери знаходяться в положенні "викл." і т.д.). Після посадки в крісло навчаний виконує операції по включенню систем, контролю параметрів, перевірці систем авіаційного і радіоелектронного устаткування, запуск і контроль параметрів, контроль готовності екіпажа до польоту, по контрольній карті контролює готовність до польоту, доповідає інструктору про готовність, запрошує дозвіл на 89900 14 зліт, і лише одержавши такий дозвіл, приступає до виконання польотного завдання. Інструктор має нагоду на всіх етапах моделювати відхилення від штатної ситуації зі свого робочого місця (поз.2). На даному етапі навчаний одержує практичні навички у реальному часі з реальними параметрами, що поступають від процесора, тобто за даними матеріалів об'єктивного контролю реєстратора типу БУР-4-1 (поз.5 Фіг.2). Всі події відбуваються у реальному часі з урахуванням реального часу запізнювання між вхідними і вихідними параметрами. Кожному положенню органів управління вертольота і їх поєднанню відповідає конкретне значення просторового положення вертольота на траєкторії польоту з урахуванням реального часу запізнювання. В процесі виконання польотного завдання навчаний управляє вертольотом шляхом переміщення органів управління. Відхилення органів управління перетворюють за допомогою датчиків в електричний сигнал Uвих у вигляді залежності величини сигналу від величини і швидкості переміщення органів управління. Даний сигнал поступає в процесор (поз.3). У процесор (поз.3) одночасно поступають сигнали початкових даних (поз.4) і статистична інформація для реальних польотів з реєстраторів польотних даних типу БУР-4-1 (поз.5), яка мала місце на літальних апаратах (поз.6) в різних польотних завданнях. За допомогою процесора (поз.3) обробляють одержану інформація, яку у вигляді електричного сигналу Uвх подають на прилади і індикатори тренажера навчання льотно-технічного складу (поз.1) і на робоче місце інструктора (поз.2). В результаті вхідні параметриUвх у вигляді параметрів крену, тангажу, швидкості, висоти і т.д. повністю відповідають вихідним параметрам Uвих у вигляді величини відхилення органів управління, які мають місце на реальному ЛА. Використання пропонованого способу навчання, перенавчання і підвищення кваліфікації льотного і інженерно-технічного складу ПТЗ на базі повнорозмірних тренажерів дозволяє: підвищити ефективність навчання і перенавчання льотного і інженерно-технічного складу; забезпечити підтримку льотних навичок в умовах обмеженого нальоту; скоротити витрату матеріалів і ресурсу ПТЗ (вертольота) на учбові і тренувальні польоти; підвищити безпеку польотів за рахунок підвищення готовності льотчиків до нештатних ситуацій; підняти бойову ефективність льотного підрозділу за рахунок підвищення групової злітаності і попереднього програшу бойових операцій; посилити контроль за дисципліною польотів. Спосіб був апробований на базі наукововиробничого підприємства «Енергія 2000» [5] протягом 2007-2008р.р. і показав високу ефективність навчання перенавчання і підвищення кваліфікації льотного і інженерно-технічного складу повітряних транспортних засобів. Джерела інформації: 1. Современные эксплуатационные технологии технического обеспечения ВВС. Под общей ред. Крутилина А.Г. - Люберцы, 2002. - С.117. 15 2. Паспорт экспортного облика на ОКР «Разработка новых и модернизация существующих тренажеров для обучения летного и технического состава (для вертолетов типа Ми-8(17), Ми-24(35), Ми-26 и их модификаций)». - М.: ОАО «Авиационные тренажеры», 2002. - 10с. Комп’ютерна верстка А. Рябко 89900 16 3. Берн С.Б. Лѐтные испытания вертолѐтов. М.: Машиностроение, 1980. - С.184-189. 4. БУР-4-1. Аварийно-эксплуатационный регистратор полетной информации для летательных аппаратов. Рекламный проспект ОАО «Електронприлад». - К.: 2007. - 1С. 5. www.simulator.com.ua. Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюTraining method for flight and technical engineering personnel of vehicles mainly air ones
Автори англійськоюMatvievskyi Oleksandr Mykolaiovych, Matviievskyi Mykola Oleksandrovych, Bykh Oleksandr Ivanovych, Bykh Ivan Oleksandrovych, Lushnichenko Volodymyr Mykolaiovych
Назва патенту російськоюСпособ обучения летного и инженерно-технического состава транспортных средств, преимущественно воздушных
Автори російськоюМатвиевский Александр Николаевич, Матвиевский Николай Александрович, Бых Александр Иванович, Бых Иван Александрович, Лушниченко Владимир Николаевич
МПК / Мітки
Мітки: спосіб, повітряних, льотного, навчання, переважно, складу, засобів, інженерно-технічного, транспортних
Код посилання
<a href="https://ua.patents.su/8-89900-sposib-navchannya-lotnogo-i-inzhenerno-tekhnichnogo-skladu-transportnikh-zasobiv-perevazhno-povitryanikh.html" target="_blank" rel="follow" title="База патентів України">Спосіб навчання льотного і інженерно-технічного складу транспортних засобів, переважно повітряних</a>
Спосіб побудови і експлуатації тренажерів, призначених для навчання льотного і інженерно-технічного складу транспортних засобів
Номер патенту: 37554
Опубліковано: 25.11.2008
Автори: Лушніченко Володимир Миколайович, Бих Олександр Іванович, Матвієвський Микола Олександрович, Матвієвський Олександр Миколайович, Бих Іван Олександрович
Мітки: експлуатації, засобів, інженерно-технічного, побудови, складу, навчання, льотного, спосіб, призначених, тренажерів, транспортних
Формула / Реферат:
1. Спосіб побудови і експлуатації тренажерів, призначених для навчання льотного і інженерно-технічного складу транспортних засобів, переважно повітряних, що включає розміщення в учбовому приміщенні тренажера у складі кабіни екіпажа, робочого місця інструктора, системи візуалізації, багатокомп'ютерного обчислювального комплексу з процесором і блоком із спеціалізованим програмним забезпеченням, імітатора авіаційних шумів і мовних повідомлень та...
Тренажер навчання водінню транспортних засобів
Номер патенту: 41730
Опубліковано: 17.09.2001
Автори: Неговський Олександр Миколайович, Хитрик Василь Онуфрійович, Вербний Микола Семенович
МПК: G09B 9/00
Мітки: тренажер, засобів, водінню, навчання, транспортних
Формула / Реферат:
1.Тренажер навчання водінню транспортних засобів, що містить кабіну транспортного засобу з розташованими у ній імітаторами приладової дошки, важелями керування і робочого місця того, якого навчають, датчики органів керування, зв'язані з входом моделюючого блока, виходи якого виконано сполученими з імітаторами приладової дошки, із пристроєм візуалізації, із пультом інструктора, із блоком звукової інформації і з пристроями узгодження з органами...
Імітатор динаміки кабіни тренажера для навчання водінню транспортних засобів
Номер патенту: 56086
Опубліковано: 15.04.2003
Автори: Богомол Володимир Іванович, Хитрик Василь Онуфрійович, Медвідь Володимир Станіславович
МПК: G09B 9/02
Мітки: навчання, кабіни, транспортних, динаміки, тренажера, імітатор, засобів, водінню
Формула / Реферат:
1. Імітатор динаміки кабіни тренажера для навчання водінню транспортних засобів, що містить дві платформи, зв'язані між собою за допомогою не менше ніж двох виконавчих гідроциліндрів та двох демпферів, одна з яких виконана рухомою,а друга -нерухомою, та кабіну транспортного засобу з розташованими у ній імітаторами приладової дошки, важелями керування, перископічними приладами спостереження, динаміком, люком і робочим місцем навчаного, при...
Пересувний пункт перевірки технічного стану колісних транспортних засобів
Номер патенту: 41603
Опубліковано: 25.05.2009
Автор: Демид Марія Миколаївна
МПК: B60R 11/00, B60R 99/00
Мітки: пункт, стану, засобів, перевірки, транспортних, пересувний, колісних, технічного
Формула / Реферат:
Пересувний пункт перевірки технічного стану колісних транспортних засобів, який являє собою переобладнаний автомобіль, з корпусом прямокутної форми, де місце водія розміщене зліва, ближче до передньої частини автомобіля, справа збоку знаходяться вхідні двері, а вихідні двері ззаду, теж справа, за місцем водія, біля лівого борту, розташовано переносний стелаж із вимірювальними приладами, за ним розміщені всі малогабаритні прилади (люфтоміри,...
Спосіб діагностики стану пристроїв транспортних засобів або їх систем
Номер патенту: 88582
Опубліковано: 26.10.2009
Автори: Матвієвський Олександр Миколайович, Лушніченко Володимир Миколайович, Бих Іван Олександрович, Матвієвський Микола Олександрович, Бих Олександр Іванович
МПК: B60T 17/00, F15B 19/00, G01N 29/04
Мітки: стану, транспортних, діагностики, пристроїв, засобів, спосіб, систем
Формула / Реферат:
1. Спосіб діагностики технічного стану пристроїв транспортних засобів, переважно повітряних, або їх систем, який включає введення діапазону допустимих значень відхилень контрольованих параметрів пристроїв транспортних засобів, що діагностуються, вимірювання і реєстрацію контрольованих параметрів пристроїв транспортних засобів, що діагностуються, наприклад, за допомогою аварійно-експлуатаційного реєстратора польотної інформації, а також...
Попередній патент: Асинхронний двигун з короткозамкненим ротором
Наступний патент: Ін’єктор для введення розчину хімічного засобу в стовбур дерева
Випадковий патент: Респіратор