Геоінформаційна система керування навігаційним станом аеропорту з використанням засобів штучного інтелекту
Номер патенту: 97877
Опубліковано: 26.03.2012
Автори: Бабій Віталій Васильович, Парняков Євген Серафимович
Формула / Реферат
1. Геоінформаційна система керування навігаційним станом аеропорту з використанням засобів штучного інтелекту, що містить чарунку автоматизованого робочого місця диспетчера аеропорту, яка, в свою чергу, складається з послідовно з'єднаних блоків вхідних даних, першого зчитувального блока і блока виконання, що з'єднаний з блоками бази даних і системи керування бази даних, другого зчитувального блока, вихід якого з'єднаний з першим входом другого суматора, другий вхід якого зв'язаний з блоком набору зразкових даних і обмежень, яка відрізняється тим, що в неї введено чарунку модуля пошукової аналітичної системи визначення навігаційного стану аеропорту з використанням засобів штучного інтелекту, що містить послідовно з'єднаний перший аналого-цифровий перетворювач, третій зчитувальний блок, блоки системи прийняття рішень та експертної системи, четвертий зчитувальний блок, цифро-аналоговий перетворювач, блок керування, другий блок виконання, третій суматор, другий аналого-цифровий перетворювач, блок візуалізації та блок бази знань і четвертий суматор, при цьому другий вхід блока прийняття рішень з'єднаний з блоком набору інформації зразкових неузгоджуваностей, другий вихід блока системи прийняття рішень через блок системи керування цієї системи прийняття рішень також зв'язаний з другим входом експертної системи, другий вхід другого блока виконання з'єднаний з блоком телекомунікаційного зв'язку з зовнішніми блоками бази даних та бази знань, другий вхід четвертого суматора з'єднаний з виходом першого аналого-цифрового перетворювача, вихід другого зчитувального блока з'єднаний з першим входом п'ятого суматора, другий вхід якого з'єднаний з виходом третього суматора, а вихід п'ятого суматора з'єднаний з другим входом першого суматора.
2. Геоінформаційна система за п. 1, яка відрізняється тим, що другий блок виконання містить послідовно з'єднані блоки ініціалізації та аналізу інформації навігаційного стану аеропорту, інженерно-технологічної підготовки електронного запиту, оперативної пам'яті збереження електронного запиту, які, в свою чергу містять послідовно з'єднані між собою три паралельно включені блоки каталогізації, реферування, аналітичної систематизації та моделювання пошуку необхідної навігаційної інформації, виходи яких зв'язані з входом шостого суматора, вихід якого з'єднаний з входом паралельно з'єднаних між собою блоків підготовки та адресації файлів, виходи яких зв'язані з входом сьомого суматора, вихід якого з'єднаний з входами паралельно з'єднаних між собою блоків пошуку операційної бази даних, фонду файлів навігаційного стану аеропорту, виходи яких з'єднані з восьмим суматором, вихід якого з'єднаний з третім суматором.
Текст
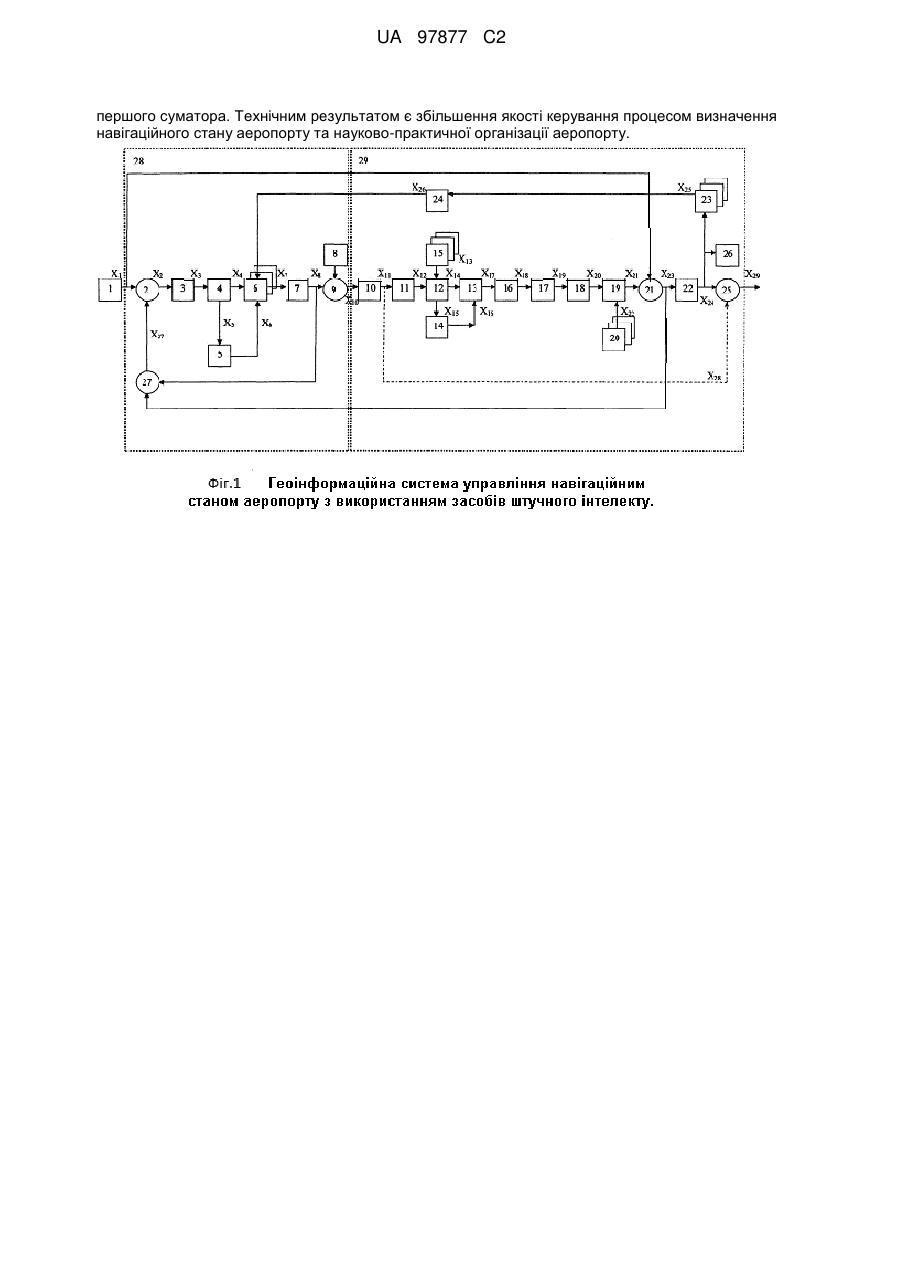
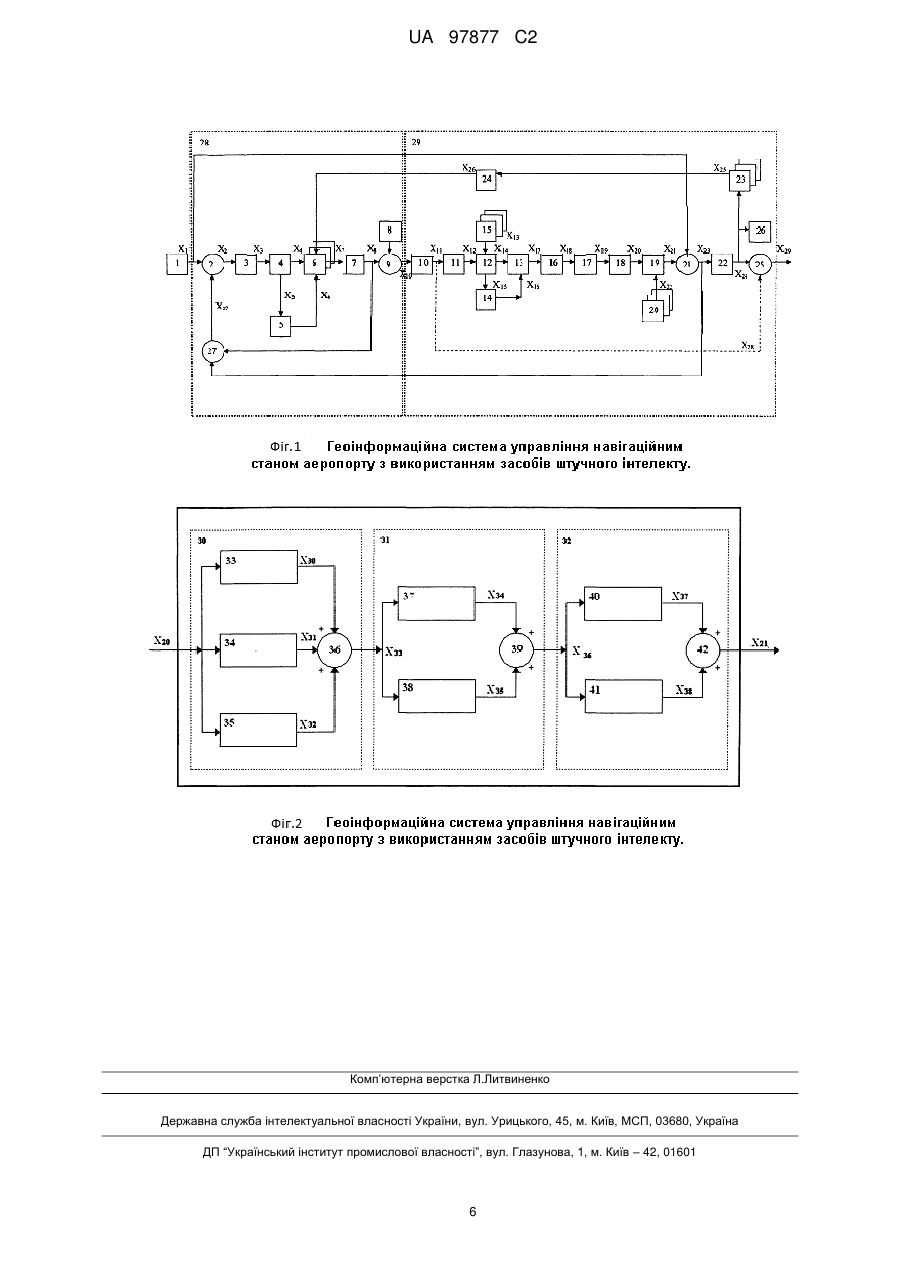
Реферат: Геоінформаційна система керування навігаційним станом аеропорту з використанням засобів штучного інтелекту належить до автоматичного та/або програмного керування, так і до складених кібернетичних систем керування. Система керування містить чарунку автоматизованого робочого місця диспетчера аеропорту, яка, в свою чергу, складається з послідовно з'єднаних блоків вхідних даних, першого зчитувального блока і блока виконання, що з'єднаний з блоками бази даних і системи керування бази даних, другого зчитувального блока, вихід якого з'єднаний з першим входом другого суматора, другий вхід якого зв'язаний з блоком набору зразкових даних і обмежень. Додатково введено чарунку модуля пошукової аналітичної системи визначення навігаційного стану аеропорту з використанням засобів штучного інтелекту, що містить послідовно з'єднаний перший аналого-цифровий перетворювач, третій зчитувальний блок, блоки системи прийняття рішень, експертної системи, четвертий зчитувальний блок, цифро-аналоговий перетворювач, блок керування, другий блок виконання, третій суматор, другий аналого-цифровий перетворювач, блок візуалізації та блок бази знань і четвертий суматор, при цьому другий вхід блока прийняття рішень з'єднаний з блоком набору інформації зразкових неузгоджуваностей, другий вихід блока системи прийняття рішень через блок системи керування цієї системи прийняття рішень також зв'язаний з другим входом експертної системи, другий вхід другого блока виконання з'єднаний з блоком телекомунікаційного зв'язку з зовнішніми блоками бази даних, бази знань, другий вхід четвертого суматора з'єднаний з виходом першого аналого-цифрового перетворювача, вихід другого зчитувального блока з'єднаний з першим входом п'ятого суматора, другий вхід якого з'єднаний з виходом третього суматора, а вихід п'ятого суматора з'єднаний з другим входом UA 97877 C2 (12) UA 97877 C2 першого суматора. Технічним результатом є збільшення якості керування процесом визначення навігаційного стану аеропорту та науково-практичної організації аеропорту. UA 97877 C2 5 10 15 20 25 30 35 40 45 50 55 Винахід належить до галузі як автоматичного і програмного управління, так і до складних кібернетичних систем управління навігаційним станом аеропорту. Основними недоліками з одного боку в існуючих системах автоматичного управління [1] є такі: - неможливість використання засобів штучного інтелекту: набору генетичних знань, експертних систем, блоків прогнозування, тощо; - використання тільки контурів наступного і стабілізуючого управління, блоків компенсування запізнення у каналах управління та неконтрольованих зміщень, які діють на об'єкт управління. Основними недоліками з одного боку в існуючих системах штучного інтелекту є, з однієї сторони їх обмежений характер, наприклад "модель розуміння", "нейронна мережа", що представляють системи розімкнутого типу або моделі підсумовуючого, порівнюючого типів, і з іншого боку вони мають тільки приватні блоки, наприклад блоки, що виробляють керуючу щільність [2, 3, 4, 5]. В розвитку вказаних систем існують системи: - для формування знань засобами штучного інтелекту [5]; - для формування знань засобами штучного інтелекту в умовах невизначеності та неповноти вхідної інформації [6]; - для формування прогнозних знань засобами штучного інтелекту [7]. В цих системах мають місце додаткові блоки, які є засобами штучного інтелекту, наприклад, системи підтримки прийняття рішень, блоки вагових коефіцієнтів та ранжування даних, блоки поточного і довгострокового прогнозування, тощо. Основними недоліками цих систем є також те, що з однієї сторони вони мають обмежений характер, наприклад моделі підсумовуючого, порівнюючого типів, з іншого боку вони мають тільки приватні блоки, наприклад блоки що виробляють керуючу щільність ймовірностей, зважених суматорів, прогнозування. Найбільш близьким аналогом який може бути взятий за прототип є система управління децентралізованого спостереження і збору запитів для розподілу інформації між засобами, які пов'язані між собою і центральною системою управління "Decentralized supervisory control system" [8]. За суттю вона є чарункою автоматичного робочого місця фахівця для децентралізованого і централізованого управління просторово розміщеними засобами і об'єктами. Вона має такі самі недоліки які були вказані раніше. В пропонованій системі зазначені недоліки відсутні за рахунок введення чарунки штучного інтелекту - модуля пошукової аналітичної системи визначення навігаційного стану аеропорту з використанням засобів штучного інтелекту, що містить послідовно з'єднані перший аналогоцифровий перетворювач, третій зчитувальний блок, блоки системи прийняття рішень, експертної системи, четвертий зчитувальний блок, цифро-аналоговий перетворювач, блок управління, другий блок виконання, третій суматор, другий аналого-цифровий перетворювач, блок візуалізації та блок знань і четвертий суматор, при цьому другий вхід блока прийняття рішень з'єднаний з блоком набору інформації зразкових неузгодженостей, другий вихід блока системи прийняття рішень через блок системи управління цієї системи прийняття рішень також пов'язаний з другим входом експертної системи, другий вхід другого блока виконання з'єднаний з блоком телекомунікаційного зв'язку з зовнішніми навігаційними об'єктами. БД, БЗ, другий вхід четвертого суматора з'єднаний з виходом аналого-цифрового перетворювача, вихід другого зчитувального блока з'єднаний з першим входом п'ятого суматора, другий вхід якого з'єднаний з виходом третього суматора, а вихід п'ятого суматора з'єднаний з другим входом першого суматора. Крім того, в ній другий виконавчий блок містить послідовно з'єднані блоки ініціалізації та аналізу навігаційного стану аеропорту, інженернотехнологічної підготовки електронного запиту, оперативної пам'яті, зберігання електронного запиту, які, в свою чергу, містять послідовно з'єднані між собою три паралельно включені блоки каталогізації, докладання, реферування, аналітичної систематизації та моделювання пошуку інформації навігаційного стану аеропорту, виходи яких пов'язані з входом шостого суматора, вихід якого з'єднаний з входом паралельно з'єднаних між собою блоків підготовки та адресації файлів, виходи яких пов'язані з входом сьомого суматора, вихід якого з'єднаний з входом паралельно з'єднаних між собою блоків пошуку оперативної бази даних, фонду файлів, виходи яких з'єднані з восьмим суматором, вихід якого з'єднаний з третім суматором. Управління навігаційним станом аеропорту при польоті повітряного судна на маршруті та в районі аеропорту є складною задачею що пов'язана з вирішенням завдань навігації, геодезії, автоматизації дистанційних вимірювань, інформаційно-управляючої комп'ютерної техніки. 1 UA 97877 C2 5 10 15 20 25 30 35 40 45 50 55 У зв'язку з цим для аналізу складних динамічних процесів, наприклад, які відбуваються в геоінформаційній інформаційній системі управління польотної та наземної обстановки при посадці та зльоті літальних апаратів доцільно використовувати так зване імітаційне моделювання. Візуалізація польотної та наземної обстановки пов'язана перш за все з їх аналітичним дослідженням. Для цього необхідно ранжувати та класифікувати вихідні дані, привести їх до єдиної уніфікованої форми представлення, що дозволяє проводити порівняння та зіставлення даних. Автоматизація цього аналізу при існуючих масивах вихідних даних можлива лише при використанні обчислювальної техніки і засобів штучного інтелекту. Існуючі методи, засоби та технології автоматизованого вимірювання, збору, збереження, обробки (ідентифікації, аналізу, синтезу та оптимізації) даних які важко формалізуються, наприклад, реляційних банків даних, програм пошуку, статистичної обробки в динаміці не враховують багатозв'язності, багаторівневості, динаміку процесів та явищ навколишнього середовища, траєкторію польотів літальних апаратів. В силу цього за їх допомогою можливе лише часткове імітаційне моделювання навігаційного стану аеропорту в реальному просторі і часі. На практиці потрібно одночасно виміряти багатометричний простір, що містить дані про стан атмосфери, грозових областей, переміщення повітряних та хмарних мас, електромагнітних та випромінювальних полів, переміщення багатьох множин літальних апаратів в 3-х вимірному просторі та часі [9]. Пропонована система управління навігаційним станом аеропорту вдосконалена модулем пошукової аналітичної системи визначення навігаційного стану аеропорту з використанням засобів штучного інтелекту, що поліпшує якість управління та науково-практичної організації аеропорту. Ця система управління навігаційним станом аеропорту являє собою кібернетичну інтелектуальну систему, яка згідно з формуванням уявлень про необхідне рішення вибирає, відповідно до обмежень і можливих варіантів рішень, найбільш оптимальне рішення з множини можливих. Кібернетична схема цієї системи зображена на фігурах 1, 2. Вона містить наступні блоки: 1. Блок формування запитів користувачів; 2. Перший суматор; 3. Перший зчитувальний блок; 4. Перший блок виконання; 5. Блок системи управління базою даних (СУБД); 6. Блок бази даних (БД); 7. Другий зчитувальний блок; 8. Блок набору зразкових даних та обмежень; 9. Другий суматор; 10. Перший аналогово-цифровий перетворювач (АЦП); 11. Третій зчитувальний блок; 12. Блок системи прийняття рішень (СПР); 13. Експертна система; 14. Блок системи управління СПР; 15. Блок набору інформації зразкових розузгоджувань, знань, рішень; 16. Четвертий зчитувальний блок; 17. Цифро-аналоговий перетворювач; 18. Блок управління; 19. Другий блок виконання; 20. Блок телекомунікаційного зв'язку із зовнішніми аеронавігаційними об'єктами, БД, БЗ, наприклад, через телекомунікації, Internet, Intranet, регіональні та глобальні мережі тощо; 21. Третій суматор; 22. Другий аналогово-цифровий перетворювач (АЦП); 23. Блок бази знань (БЗ); 24. Система управління БЗ; 25. Четвертий суматор; 26. Блок візуалізації; 27. П'ятий суматор; 28. Автоматизоване робоче місце диспетчера; 2 UA 97877 C2 5 10 15 20 25 30 35 40 45 50 55 29. Модуль пошукової аналітичної системи визначення навігаційного стану аеропорту з засобами штучного інтелекту; 30. Блок ініціалізації та аналізу інформації навігаційного стану аеропорту; 31. Блок інженерно-технологічної підготовки електронного запиту; 32. Блок оперативної пам'яті збереження електронного запиту; 33. Блок каталогізації; 34. Блок рефератування; 35. Блок аналітичної систематизації та моделювання пошуку необхідної навігаційної інформації; 36. Шостий суматор; 37. Блок підготовки файлу; 38. Блок адресації файлу; 39. Сьомий суматор; 40. Блок пошуку оперативної бази даних; 41. Блок фонду файлів навігаційного стану аеропорту; 42. Восьмий суматор. На цих фігурах також зображене наступне: X1 - інформація запиту користувача в текстовому вигляді; Х2 - інформація розузгодження Х2=Х1 - Х27; Х3 - інформація з блока зчитування в текстовому виді, наприклад розузгоджена інформація вимога користувача; Х4 - кодова інформація, наприклад у вигляді загального біполярно модульованого коду (манчестер - 2); Х5 - запит до блока5; Х6 - запит на витяг даних із Бази Даних (БД); Х7 - інформація яку одержують із БД; Х8 - інформація з виходу другого зчитувального блока; Х9 - інформація з боку набору зразкових даних та обмежень; X10 - інформація з другого суматора; Х11 - кодова інформація з АЦП; X12 - кодова інформація з третього зчитувального блока; X13 - кодова інформація блока набору інформації зразкових розсогласувань; X14 - кодова інформація з блоку системи прийняття рішень - вхідна для експертної системи (ЕС); X15 - запит до блока 14; X16 - запит-вимога до ЕС; X17 - вихідна інформація з EC; X18 - інформація з блока 16; X19 - інформація в текстовому вигляді з блока ЦАП; Х20 - інформація з блока управління; Х21 - інформація з другого блока виконання; Х22 - інформація із зовнішніх блоків даних навігаційного стану аеропорту, знань, наприклад телекомунікаційний зв'язок, Internet, Intranet, тощо; Х23 - інформація розузгодження в текстовому вигляді Х23=Х21 – X1; Х24 - кодова інформація з другого блока АЦП; Х25 - інформація, яку необхідно ввести в БД з БЗ; Х26 - інформація, яку виводить блок 24; Х27 - сумарна інформація в текстовому вигляді Х27=Х8+Х23; Х28 - бажана (цільова) інформація; Х29 - інформація відхилення від цільової інформації; Х30 - каталогізована документальна інформація з блока 33; Х31 - реферантивна інформація документів з навігаційного стану аеропорту; Х32 - вхідна інформація до блока 35; Х33 - вхідна інформація до блока 31; Х34 - файлова інформація вказаних документів; Х35 - адресна інформація файлів документів; Х36 - вхідна інформація до блока 32; Х37 - вихідна інформація з блока 40; Х38 - вихідна інформація з блока 41. 3 UA 97877 C2 5 10 15 20 25 30 35 40 45 50 55 60 В практичних задачах визначення навігаційного стану аеропорту існує можливість попереднього прогнозування маневрів групи повітряних цілей або кожної цілі окремо на основі апріорних навігаційних відомостей про їх політ, маршрут, курс, відстань, швидкість, прискорення та інші навігаційні параметри, стан навколишнього середовища, а також інформацію про поточний просторово-часовий розподіл вказаних цілей. В прогнозованій системі вхідні дані цих цілей формують в блоці 1 вхідних даних - блоки формування запитів користувачів. На перший суматор 2 надходять вхідні дані і дані зворотного зв'язку, які формують інформацію (сигнал) неузгодженості. Е1=Х1-Х27. Суматор являє собою зсувний регістр (аналоговий або цифровий) для попереднього порівняння, що надходять до нього семантичних або кодових послідовностей. На виході суматора формуються відповідно аналогова, або цифрова інформація (сигнали) неузгодженості або підсумовування у відповідності з функцією суматора та знаків інформації на його входах. Інформація (сигнал) неузгодженості надходить на перший зчитувальний блок 3, після якого обробляється першим виконавчим блоком (диспетчером). За допомогою блока 5 необхідна інформація береться з БД 6. Ця інформація надходить до другого зчитувального блока 7, порівнюється з інформацією блока 8 та передається в перший АЦП 10. Після цього, кодова інформація, порівняна з інформацією блока 15 за допомогою блоків 12, 14 і експертної системи 13 надходить в блок 16, перетворюється в текстовий вигляд блоком 17 і відправляється до блока 18. З нього управляюча інформація виконується блоком 19, наприклад, аналітиком навігаційного стану аеропорту, який має зв'язок з вказаними зовнішніми джерелами інформації та іншої інформації через блок 20. Нарешті ця інформація порівняна з вхідною та перетворена другим АЦП 22 надходить в БЗ і далі в БД. Чарунка штучного інтелекту - модуль 19 пошукової аналітичної системи визначення навігаційного стану аеропорту з використанням засобів штучного інтелекту містить послідовно з'єднані другий суматор, перший АЦП, третій зчитувальний блок, блоки системи прийняття рішень, експертної системи, четвертий зчитувальний блок, ЦАП, блок управління, другий блок виконання, третій суматор, другий АЦП, блок Б3, четвертий суматор. Крім того, він містить блоки набору інформації зразкових неузгодженостей, знань, рішень, системи управління СПР, блок зв'язку з вказаними зовнішніми джерелами інформації навігаційного стану аеропорту. При цьому другий вхід блока 12 пов'язаний з виходом блока 15, другий вихід блока 12 через блок 14, з'єднаний з блоком 13. Далі другий вхід блока 19 з'єднаний з блоком 20, другий вхід суматора 9 з'єднаний з блоком 8. Блок керування 19 містить модуль вказаної пошукової аналітичної системи. Він складається з послідовно з'єднаних блоків ініціалізації та аналізу навігаційного стану аеропорту, інженернотехнологічної підготовки електронного запиту, оперативної пам'яті, збереження електронного запиту. Блок 30 містить паралельно з’єднані між собою блоки каталогізації, рефератування, аналітичної систематизації та моделювання пошуку вказаної інформації. Блок 31 містить паралельно з'єднані між собою блоки підготовки файлу документу, його адресації. Блок 32 містить, в свою чергу, паралельно з'єднані між собою блоки пошуку оперативної БД, фонду файлів навігаційного стану аеропорту. Загальне формування цього фонду носить циклічний, стабілізуючий і слідкуючий характер, що дозволяє своєчасно задовольнити вимоги користувача. Якщо набір реальних рішень у вигляді відповідних аналогових і кодових послідовностей не відповідає набору вхідних ознак та обмежень, лінійна процедура формування інформації навігаційного стану аеропорту з точки зору постановки задачі, цільової функції, рішення повторюється. На четвертому суматорі 25 формується інформація (сигнал) неузгодженості Е2 = Х24 - Х28, яка є істинним рішенням. Таким чином, в приведеній системі реалізується вибір та формування реальних даних з множини допустимих, які відповідають заданим умовам та обмеженням і дають змогу управляти ними. В пропонованій системі за допомогою чарунок штучного інтелекту у вигляді модуля пошукової аналітичної системи визначення навігаційного стану аеропорту з використанням засобів штучного інтелекту знаходять переваги над недоліками та різноманітними протиріччями в знаннях про навігаційний стан аеропорту. Система прийняття рішень формує ряд альтернативних рішень на ґрунті розв'язання виявлених протиріч. Прискорення знаходження та прийняття рішень досягається за допомогою використання програмних засобів і пакетів програм систем підтримки прийняття рішень. Інформація відповідних блоків формує як аналогові, так і 4 UA 97877 C2 5 10 15 20 25 кодові послідовності у відповідності прийнятому порядку аналогового та кодового обміну інформацією. Ефективність пропонованої системи, як випливає з опису цієї системи, досягнута за допомогою включення в її склад модуля пошукової аналітичної системи визначення навігаційного стану аеропорту з використанням засобів штучного інтелекту. Таким чином, в приведеній системі реалізується вибір та формування реальних рішень з формуванням фонду інформації визначення навігаційного стану аеропорту з множини допустимих, які відповідають заданим умовам та обмеженням. Джерела інформації: 1. Цыпкин Я.З., Основы теории автоматических систем, - М.: Наука, 1977 - С.81, рис. 66. 2. Авторское свидетельство СССР №855607, "Регулятор", кл.G05B 13/02. 3. Патент Российской Федерации "Система автоматического управления" (19) RU (11), 2128358 (13) С1, (51) МПК 6 G05B13/02. Бюл. №5 от 27.03.1999г. 4. Патент Российской Федерации "Система для получения творческого искусственного интеллекта", (19) RU (11) 2092900 (13) С1, (51) МПК 6 G06G7/60. Бюл. от 10.10.1997г. 5. Патент України на винахід № 78849 МПК G06G від 25.04.2007р. "Система для формування знань засобами штучного інтелекту". 6. Патент України на корисну модель № 23645 МПК G06G7-6 від 11.06.2006р. "Система для формування знань засобами штучного інтелекту в умовах невизначеності та неповноти вхідної інформації". 7. Патент України на корисну модель № 18880 МПК G06G7-6 від 15.11.2006р. "Система для формування прогнозних знань засобами штучного інтелекту". 8. Патент США № 6526323, кл. США 700\9 от 25.02.2003г. "Decentralized supervisory control system" ("Система управления децентрализованного управления"). 9. Матеріали міжнародної науково-практичної конференції ГІС-ФОРУМ 2001. - К.: "ГІСасоціація України", 18-20 грудня 2001 р., с 88-92. ФОРМУЛА ВИНАХОДУ 30 35 40 45 50 55 60 1. Геоінформаційна система керування навігаційним станом аеропорту з використанням засобів штучного інтелекту, що містить чарунку автоматизованого робочого місця диспетчера аеропорту, яка, в свою чергу, складається з послідовно з'єднаних блоків вхідних даних, першого зчитувального блока і блока виконання, що з'єднаний з блоками бази даних і системи керування бази даних, другого зчитувального блока, вихід якого з'єднаний з першим входом другого суматора, другий вхід якого зв'язаний з блоком набору зразкових даних і обмежень, яка відрізняється тим, що в неї введено чарунку модуля пошукової аналітичної системи визначення навігаційного стану аеропорту з використанням засобів штучного інтелекту, що містить послідовно з'єднаний перший аналого-цифровий перетворювач, третій зчитувальний блок, блоки системи прийняття рішень та експертної системи, четвертий зчитувальний блок, цифро-аналоговий перетворювач, блок керування, другий блок виконання, третій суматор, другий аналого-цифровий перетворювач, блок візуалізації та блок бази знань і четвертий суматор, при цьому другий вхід блока прийняття рішень з'єднаний з блоком набору інформації зразкових неузгоджуваностей, другий вихід блока системи прийняття рішень через блок системи керування цієї системи прийняття рішень також зв'язаний з другим входом експертної системи, другий вхід другого блока виконання з'єднаний з блоком телекомунікаційного зв'язку з зовнішніми блоками бази даних та бази знань, другий вхід четвертого суматора з'єднаний з виходом першого аналого-цифрового перетворювача, вихід другого зчитувального блока з'єднаний з першим входом п'ятого суматора, другий вхід якого з'єднаний з виходом третього суматора, а вихід п'ятого суматора з'єднаний з другим входом першого суматора. 2. Геоінформаційна система за п. 1, яка відрізняється тим, що другий блок виконання містить послідовно з'єднані блоки ініціалізації та аналізу інформації навігаційного стану аеропорту, інженерно-технологічної підготовки електронного запиту, оперативної пам'яті збереження електронного запиту, які, в свою чергу містять послідовно з'єднані між собою три паралельно включені блоки каталогізації, реферування, аналітичної систематизації та моделювання пошуку необхідної навігаційної інформації, виходи яких зв'язані з входом шостого суматора, вихід якого з'єднаний з входом паралельно з'єднаних між собою блоків підготовки та адресації файлів, виходи яких зв'язані з входом сьомого суматора, вихід якого з'єднаний з входами паралельно з'єднаних між собою блоків пошуку операційної бази даних, фонду файлів навігаційного стану аеропорту, виходи яких з'єднані з восьмим суматором, вихід якого з'єднаний з третім суматором. 5 UA 97877 C2 Комп’ютерна верстка Л.Литвиненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Назва патенту англійськоюGeoinformation system of airport state control with using artificial intellegence tools
Автори англійськоюParniakov Yevhen Serafymovych, Babii Vitalii Vasyliovych
Назва патенту російськоюГеоиформационная система управления навигационным состоянием аэропорта с использованием средств искусственного интеллекта
Автори російськоюПарняков Евгений Серафимович, Бабий Виталий Васидьевич
МПК / Мітки
МПК: G06G 7/60
Мітки: станом, штучного, засобів, навігаційним, керування, використанням, інтелекту, аеропорту, геоінформаційна, система
Код посилання
<a href="https://ua.patents.su/8-97877-geoinformacijjna-sistema-keruvannya-navigacijjnim-stanom-aeroportu-z-vikoristannyam-zasobiv-shtuchnogo-intelektu.html" target="_blank" rel="follow" title="База патентів України">Геоінформаційна система керування навігаційним станом аеропорту з використанням засобів штучного інтелекту</a>
Геоінформаційна система керування навігаційним станом аеропорту з використанням засобів штучного інтелекту
Номер патенту: 58646
Опубліковано: 26.04.2011
Автори: Парняков Євген Серафимович, Бабій Віталій Васильович
МПК: G06G 7/60
Мітки: засобів, використанням, інтелекту, геоінформаційна, штучного, навігаційним, аеропорту, система, керування, станом
Формула / Реферат:
1. Геоінформаційна система керування навігаційним станом аеропорту з використанням засобів штучного інтелекту, що містить чарунку автоматичного робочого місця диспетчера аеропорту, яка складається з послідовно з'єднаних блоків вхідних даних, першого зчитувального блока і блока виконання, що з'єднаний з блоками бази даних і системи керування бази даних, другого зчитувального блока, вихід якого з'єднаний з першим входом другого суматора,...
Система керування територіальним фондом засобами штучного інтелекту
Номер патенту: 87216
Опубліковано: 25.06.2009
Автори: Парняков Євген Серафимович, Мартинюк Олена Антонівна
МПК: G06N 3/00, G06G 7/60, G06F 15/18, G05B 13/00
Мітки: штучного, фондом, система, територіальним, керування, інтелекту, засобами
Формула / Реферат:
1. Система керування територіальним фондом засобами штучного інтелекту, що містить модуль автоматизованого робочого місця фахівця, що, в свою чергу, містить послідовно з'єднані блоки формування запитів користувачів, перший суматор, зчитуючий блок та виконавчі блоки, блок бази даних, другий зчитуючий блок, при цьому другий вихід першого виконавчого блоку через блок системи керування базою даних з'єднаний з другим входом блока бази даних, вихід...
Система керування територіальним фондом засобами штучного інтелекту
Номер патенту: 31404
Опубліковано: 10.04.2008
Автори: Парняков Євген Серафимович, Мартинюк Олена Антонівна
МПК: G05B 13/02, G06G 7/00
Мітки: територіальним, інтелекту, фондом, керування, штучного, засобами, система
Формула / Реферат:
1. Система керування територіальним фондом засобами штучного інтелекту, що містить чарунку автоматизованого робочого місця фахівця, що, в свою чергу, містить послідовно з'єднані блоки формування запитів користувачів, перший суматор, зчитуючий блок та блоки виконання, бази даних, другий зчитуючий блок, при цьому другий вихід першого виконавчого блока через блок системи керування базою даних з'єднаний з другим входом блока бази даних, вихід...
Система керування бібліотечним фондом засобами штучного інтелекту
Номер патенту: 33354
Опубліковано: 25.06.2008
Автори: Парняков Євген Серафимович, Гребенник Алла Григорівна
МПК: G05B 13/02, G06G 7/00
Мітки: фондом, інтелекту, штучного, засобами, керування, бібліотечним, система
Формула / Реферат:
1. Система керування бібліотечним фондом засобами штучного інтелекту, що містить чарунку автоматизованого робочого місця бібліотекаря, який, в свою чергу, складається з послідовно з'єднаних блока вхідних даних, першого зчитувального блока і блока виконання, що з'єднаний з блоками бази даних і системи керування базою даних, другого зчитувального блока, вихід якого з'єднаний з першим входом другого суматора, другий вхід якого зв'язаний з блоком...
Система для формування знань засобами штучного інтелекту
Номер патенту: 78849
Опубліковано: 25.04.2007
Автори: Парняков Євген Серафимович, Клінцов Леонід Миколайович, Злобіна Ольга Василівна, Скітер Ігор Семенович
МПК: G06N 3/00, G06F 15/18, G06G 7/60
Мітки: штучного, засобами, система, знань, формування, інтелекту
Формула / Реферат:
Система для формування знань засобами штучного інтелекту, що містить послідовно з'єднані блок зчитування і перший аналого-цифровий перетворювач (АЦП), а також блок бази знань, блок бази даних, блок керування блоком бази даних, суматор, з'єднаний з блоком набору зразкових знань, блок керування, цифро-аналоговий перетворювач (ЦАП) та виконавчий блок, яка відрізняється тим, що в неї додатково введені експертна система, система прийняття рішень,...
Попередній патент: Лічильник гальмівного шляху
Наступний патент: Спосіб контролю якості міжелементних з’єднань свинцево-кислотних акумуляторних батарей
Випадковий патент: Спосіб підвищення регенераційної здатності калюсних культур цукрових буряків з комплексною стійкістю до абіотичних стресових чинників