Спосіб протипомпажного регулювання і захисту компресора
Номер патенту: 98843
Опубліковано: 25.06.2012
Автори: Сергеєв Сергій Павлович, Костян Ігор Іванович, Новіков Олег Григорович

Формула / Реферат
1. Спосіб протипомпажного регулювання і захисту компресора від помпажу шляхом виміру тиску і температури газу на вході і виході компресора, перепаду тиску газу на мірній шайбі, виміру частоти обертання ротора компресора, розрахунку по зміряних величинах положення робочої точки компресора, формуванням сигналу управління на протипомпажний клапан замкнутим контуром ПІД (пропорційно-інтегрально-диференційне) регулювання, який відрізняється тим, що різниця між заданням на регулювання і положенням робочої точки перетворюється по заздалегідь заданій функції і після цього потрапляє на вхід ПІД-регулятора, формується сигнал управління, визначається напрямок його зміни, а також виконується обмеження, на кожному циклі перерахунку, величини зміни сигналу управління в бік закриття протипомпажного клапана обмежуючим розрахунковим значенням.
2. Спосіб протипомпажного регулювання і захисту компресора за п. 1, який відрізняється тим, що коефіцієнти ПІД-регулятора визначаються при налаштуванні конкретного контуру з умови найбільш точної підтримки заданої величини запасу по помпажу на сталому режимі, а перетворення положення робочої точки в зоні безпеки проводиться до забезпечення повного відкриття протипомпажного клапана при досягненні робочої точки межі помпажу.
3. Спосіб протипомпажного регулювання і захисту компресора за п. 1, який відрізняється тим, що коефіцієнти ПІД-регулятора визначаються при налаштуванні конкретного контуру з умови максимальної швидкодії контуру при збереженні стійкості процесу, значення максимальної швидкості закриття клапана встановлюється з умови аперіодичності повернення робочої точки на лінію регулювання.
Текст
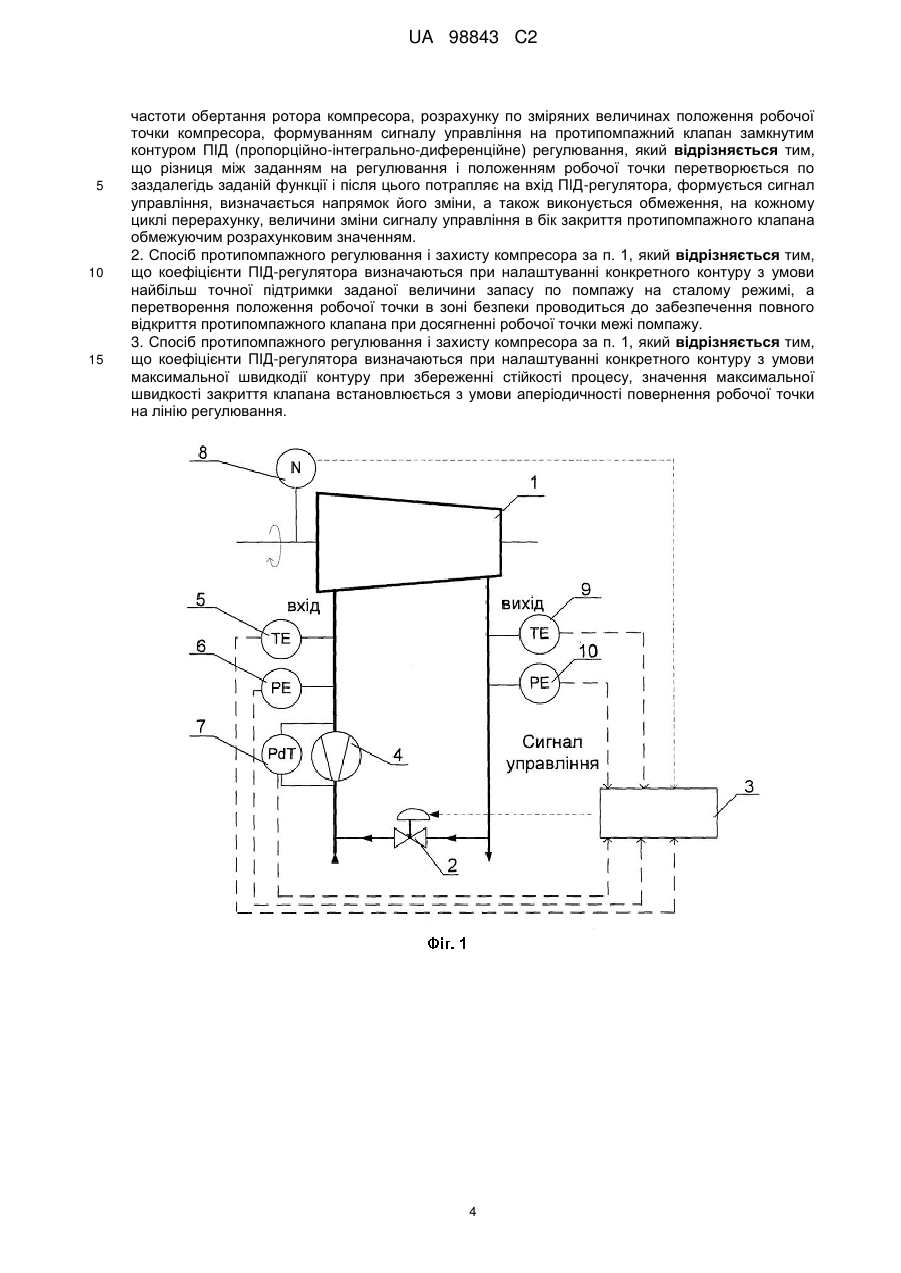
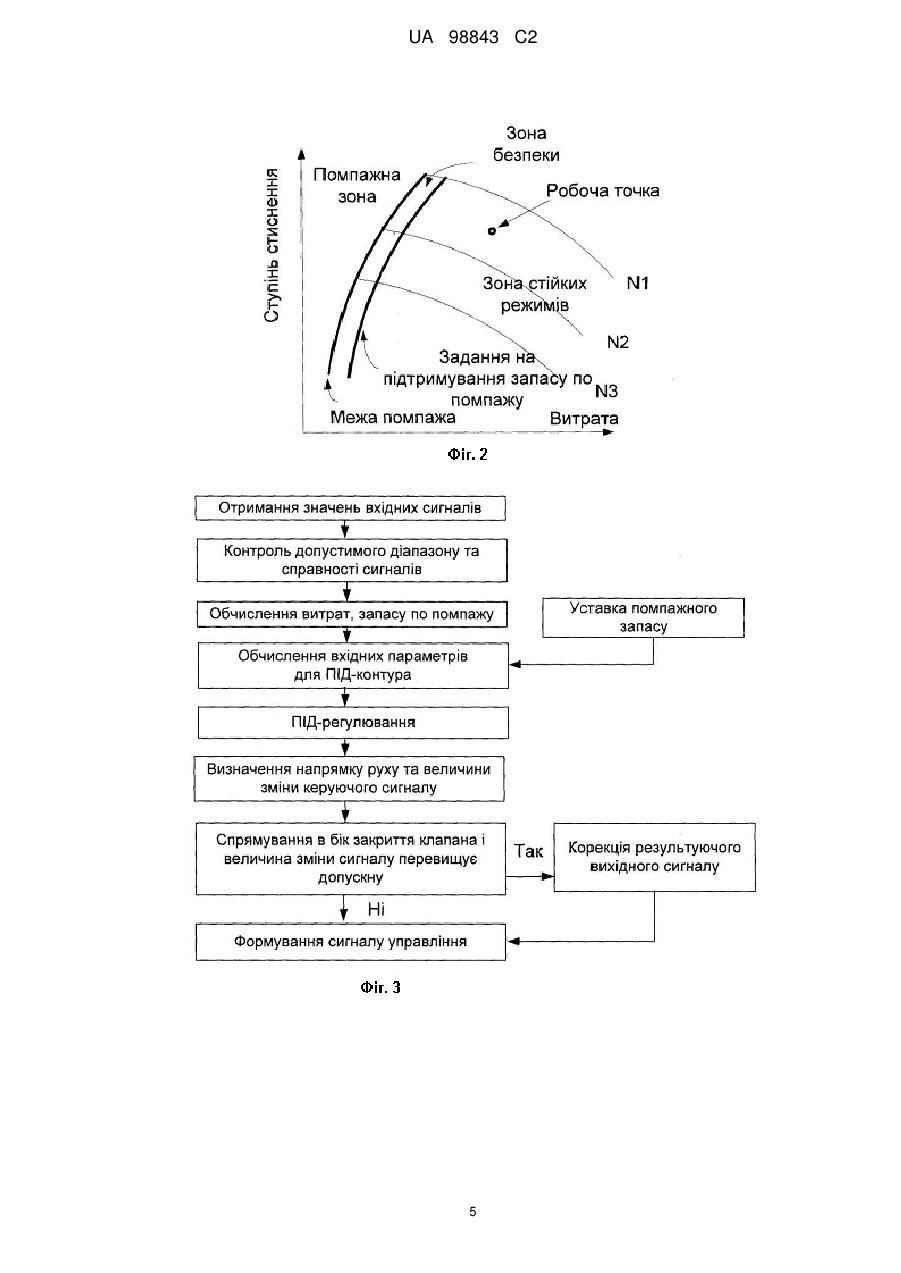
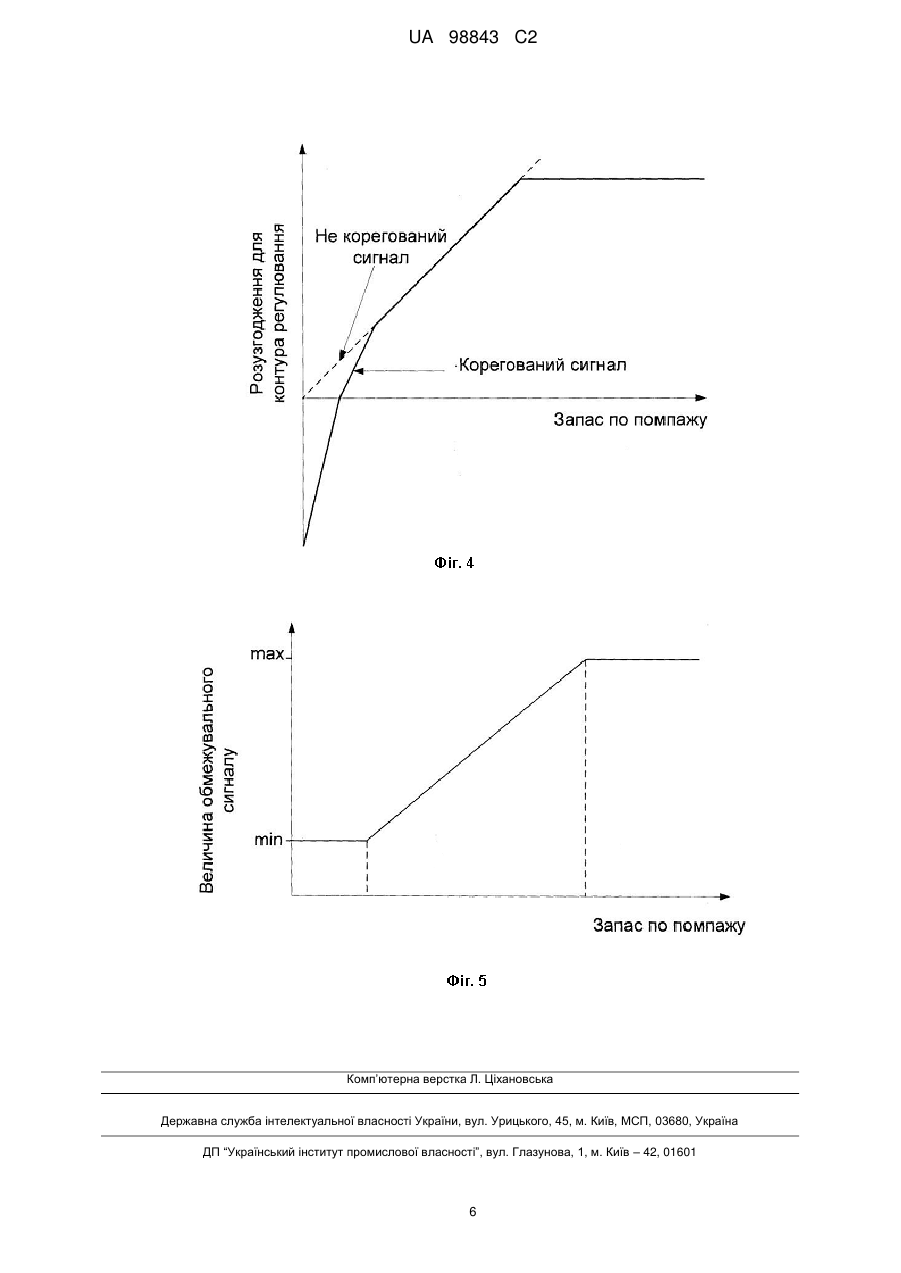
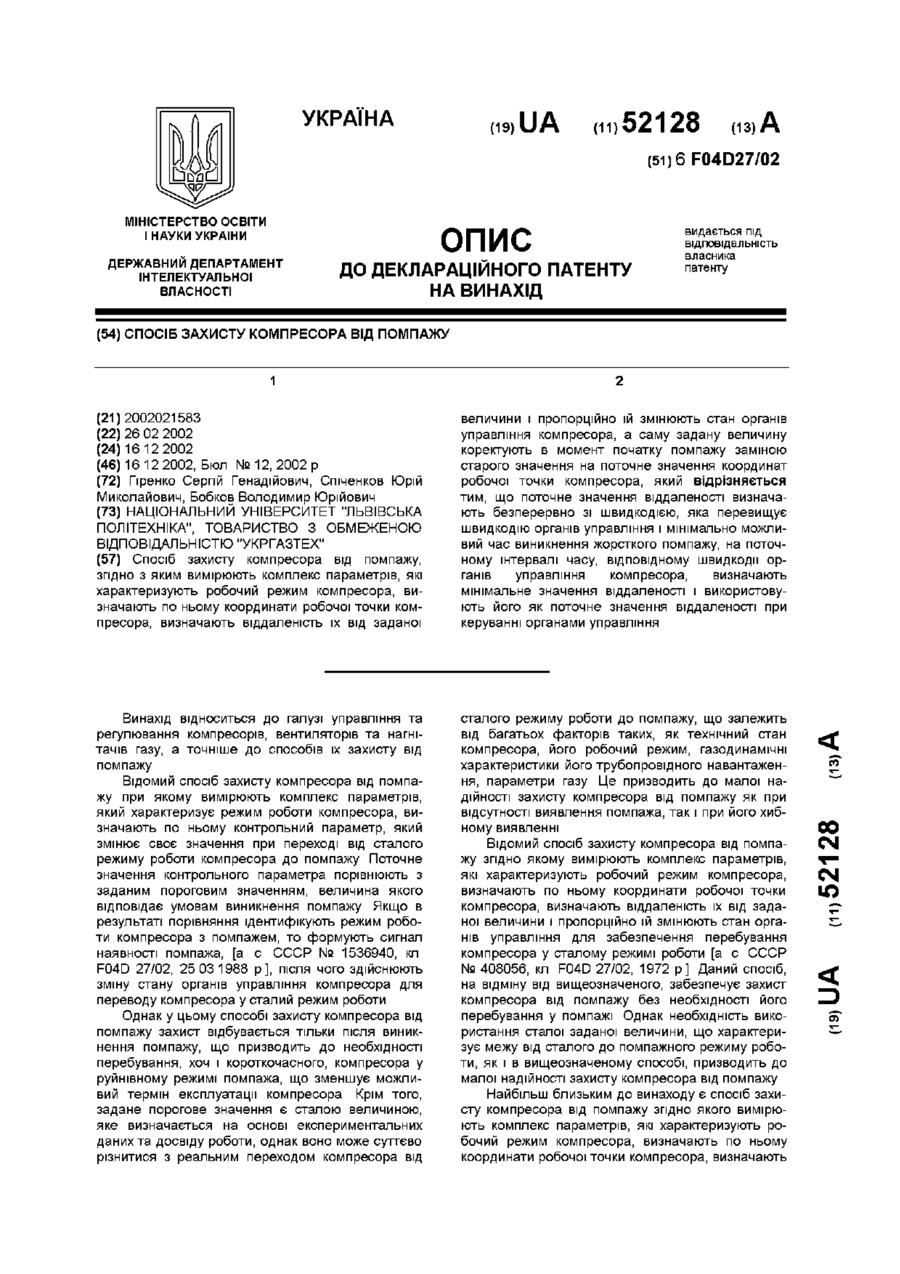
Реферат: Спосіб протипомпажного регулювання і захисту компресора належить до галузі автоматизації компресорних установок, зокрема до систем протипомпажного регулювання і захисту компресорних установок, у тому числі газоперекачувальних агрегатів. Суть винаходу полягає в тому, що у відомому способі антипомпажного регулювання, що запобігає переміщенню робочої точки по газодинамічній характеристиці компресора за лінію регулювання або підтримкою її на вказаній лінії, з використанням алгоритму замкнутого контуру ПІД-регулювання, в якому різницю між заданням і змінною регулювання після її обчислення і до використання як вхідної змінної для ПІД-контуру, перетворюються згідно з заздалегідь заданою функцією залежно від положення робочої точки на розмірній газодинамічній характеристиці компресора. Технічний результат полягає в збільшенні точності, економічності і ефективності протипомпажного регулювання. UA 98843 C2 (12) UA 98843 C2 UA 98843 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до галузі автоматизації компресорних установок, зокрема до систем протипомпажного регулювання відцентрових компресорів, у тому числі газоперекачувальних агрегатів. Відомі способи протипомпажного регулювання компресора, в яких управляюча дія, що формується для протипомпажного клапана, обчислюється в замкнутому контурі регулювання по пропорційно-інтегральному закону (ПІ-закон) або по пропорційному закону (П-закону). Задається лінія регулювання, зрушена від межі помпажу в область стійких режимів на величину зони безпеки, і береться розрахункове поточне значення положення робочої точки на газодинамічній характеристиці компресора. В разі відхилення робочої точки від лінії регулювання у напрямку межі помпажу формується управляюча дія на збільшення відкриття клапана, а при відхиленні у напрямку зони стійких режимів - на закриття його [А. с. СРСР № 408056 кл. F04D27/02, 1972 г.; а. с. СРСР №1201555, кл. F04D27/02, 30.12.1985 г.; "Опыт эксплуатации систем противопомпажного регулирования и защиты газоперекачивающих агрегатов компрессорных станций", ВНИИЭГазпром, Обзорная информация, Серия "Транспорт и хранение газа". - Вып. 10. - М.: - 1986. "Автоматизация процессов газовой промышленности", Под общ. ред. А.З.Шайхутдинова и др., СПб., Наука, 2003 г.; патент US 5306113 Gunn et al.; патент US 4944652 7/1990 Blotenberg; патент US 4831534 5/1989 Blotenberg; патент US 4697980 10/1987 Keyes, IV et al.]. Відомі способи протипомпажного регулювання компресора, що формують сигнал при передпомпажному, а також помпажному стані компресора або швидкому переміщенні робочої точки у напрямку межі помпажу і утримання цього сигналу (відкритий контур) аж до втручання обслуговуючого персоналу. Цей метод забезпечує захист компресора від помпажу, але в результаті відкриття (повного або не повного) протипомпажного крана робоча точка компресора переміщається самочинно і виявляється в області стійких режимів на значному віддаленні від межі помпажу, значно знижуючи ККД компресора [А. с. СРСР № 985450 кл. F04D27/02, 30.12.1982 г.; патент РФ №1466394 кл. F04D 27/02, 10.06.1997 г.; патент РФ №2172433 кл. F04D 27/02, 20.08.2001 г.; патент US 4949276 8/1990 Staroselsky et al.; патент US 5709526 1/1998 NcLeister.] Відомий спосіб протипомпажного регулювання компресора, в якому поєднуються два закриті контури регулювання. Перший контур призначений для керування положенням робочої точки компресора при стабільних режимах роботи. Другий контур призначений для регулювання швидкості наближення робочої точки до лінії межі помпажу при потужних обуреннях газодинамічного середовища компресора [патент US 5798941 8/1998 NcLeister.]. Один з найближчих по технічній суті до заявленого способу і вибраний як аналог спосіб протипомпажного регулювання компресора використовується фірмою "Compressor Controls Corporation", США [патент US 4949276 Aug. 14, 1990], в якому поєднуються закритий і відкритий контури регулювання. Згідно зі способом протипомпажного захисту, запропонованого в аналозі, відцентрові компресори мають розмірні газодинамічні характеристики, вхідну і вихідну мережі і систему протипомпажного регулювання, що керує протипомпажним клапаном для підтримки заданого запасу по помпажу. Для цього в замкнутому контурі ПІ-регулювання здійснюють стабілізацію комплексу параметрів, які визначають положення робочої точки в заданій системі координат на рівні завдання, зрушеного на величину зони безпеки від межі помпажу у напрямку зони стійких режимів роботи компресора і формування сигналу управління для протипомпажного клапана. Як і в способі-аналозі, в способі протипомпажного регулювання компресора, що заявляється, вимірюють поточне значення параметрів, по яких обчислюють положення робочої точки на розмірній газодинамічній характеристиці компресора. Обчислюють поточне розузгодження регулятора у вигляді різниці значень регульованого параметра і задання. У замкнутому контурі регулювання за ПІД-законом (пропорційно-інтегрально-диференційним) обчислюється сигнал управління для протипомпажного клапана. Замкнутий контур ПІ-регулювання способу-прототипу не має можливості протистояти великим обуренням газодинамічного середовища компресора із-за необхідності зменшення зони безпеки при заданому ступені стиснення і обмеження пропорційного коефіцієнта ПІрегулятора для плавного регулювання на сталому режимі. Для протистояння потужним збуренням газодинамічного середовища, які виявляються у вигляді швидкого переміщення робочої точки у напрямку лінії межі помпажу, в способінайближчому аналозі застосовується метод зсуву задання в напрямку від межі помпажу, а також використовується відкритий контур управління. Відкритий контур управління виконує швидке ступінчасте або задане відкриття протипомпажного клапана. При цьому під час дії відкритого контуру управління зворотний зв'язок відключається, що значно знижує точність 1 UA 98843 C2 5 10 15 20 25 30 35 40 45 50 55 60 регулювання. Крім того, застосування відкритого контуру управління передбачає зсув робочої точки на значну відстань від лінії регулювання в зону стійкої роботи компресора. При цьому погіршуються економічні показники даного методу. Величина зсуву задання для закритого контуру, визначена як функція від швидкості руху робочої точки у напрямку до межі помпажу, вносить додаткову штучну помилку розузгодження, і відгук ПІ-регулятора закритого контуру в даному випадку стає менш передбаченим. Головна задача винаходу - забезпечити утримання робочої точки на лінії регулювання, зміщеній на задану величину від межі помпажу у бік стійких режимів роботи компресора (підтримувати заданий запас по помпажу). Ефективно протистояти збуренням газодинамічного середовища компресора, у тому числі при короткочасних перехідних процесах і на сталому режимі. Не допускати наближення робочої точки до лінії межі помпажу. Відмітним елементом винаходу, що заявляється, є відмова від використання відкритого контуру регулювання і забезпечення можливості закритого контуру ПІД-регулятора протистояти швидкопоточним збуренням газодинамічного середовища компресора. Успішна реалізація його дозволить підвищити точність і економічність протипомпажного регулювання. Згідно з даним способом, в замкнутому контурі регулювання здійснюють стабілізацію комплексу параметрів, які характеризують положення робочої точки в заданій системі координат на рівні задання зрушеного на величину зони безпеки від межі помпажу у напрямі зони стійких режимів роботи компресора. Вимірюється поточне значення параметрів, по яких обчислюються положення робочої точки на розмірній газодинамічній характеристиці компресора (поточний помпажний запас). Обчислюється поточне розузгодження для ПІДрегулятора у вигляді різниці значень запасу по помпажу і задання на підтримку помпажного запасу. Виконується нелінійне перетворення розузгодження між заданням і помпажним запасом згідно з функцією перетворення. Замкнутим контуром регулювання по ПІД-закону обчислюється сигнал управління на протипомпажний клапан. Задача перетворення сигналу розузгодження - збільшити різницю між заданням і положенням робочої точки компресора в зоні безпеки з метою значного посилення протистояння контуру переміщенням робочої точки у напрямку лінії межі помпажу, максимально протистояти зменшенню помпажного запасу в зоні безпеки, забезпечити повне відкриття протипомпажного клапана при досягненні робочою точкою межі помпажу. Розузгодження збільшується у міру віддалення робочої точки від лінії регулювання та у міру наближення до лінії помпажу. Наприклад, якщо сигнал розузгождення за лінією регулювання збільшується в 2-3 рази, то біля лінії помпажу в 50-100 разів. Таке перетворення, відповідною мірою підсилює реакцію контуру регулювання на рух робочої точки в напрямку лінії помпажу значно більшим відкриттям протипомпажного клапана в порівнянні з аналогічнім переміщенням в зоні стійких режимів. Реакція контуру регулювання на зворотне переміщення робочої точки в зоні безпеки від лінії помпажу до лінії регулювання не буде настільки ж значною, оскільки обмежена швидкістю зміни сигналу керування в зворотному напрямку. Відмітним елементом даного винаходу, на відміну від прототипу, як і від всіх інших відомих способів протипомпажного регулювання, є перетворення розузгодження для ПІД-регулятора, пов'язане з використанням перетворюючих нелінійних функцій. Також, в даному способі накладається обмеження на зміни вихідного сигналу ПІД-регулятора при його зміні у бік закриття з метою: забезпечити плавне наближення робочої точки до лінії задання з боку зони стійких режимів, стабілізувати технологічні параметри, перешкоджати появі перерегулювання, свідомо виключити флуктуації робочого середовища, забезпечувати оптимальний час закриття і, тим самим, підвищувати ефективність компресорної установки. Даний спосіб пояснюється наступними формулами і кресленнями: На фіг. 1 схематично показаний компресор з вхідним і вихідним трактами (всмоктування і нагнітання) 1, протипомпажний клапан 2, контролер 3, встановлені датчики виміру технологічних параметрів (5, 9 - датчики виміру температури робочої середи ТЕ; 6, 10 - датчики виміру тиску робочої середи РЕ; 7 - датчик виміру перепаду тиску PdT; 8 - датчик виміру оборотів ротора компресора N). У даному прикладі розглядається варіант зі встановленою мірною шайбою 4 у вхідному тракті компресора. Стискуване середовище надходить на вхід компресора 1, де вимірюється тиск, температура, перепад тиску на мірній шайбі 4 відповідними датчиками 5, 6, 7. Після компримування на виході компресора 1 також вимірюється тиск і температура робочого середовища відповідними датчиками 9 і 10. Вимірюються оберти ротора компресора 1 датчиком 8. Зміряні параметри надходять в контролер 3. Після обробки початкових даних по заданих алгоритмах і контурах регулювання формується сигнал управління, який передається на позиціонер протипомпажного клапана 2. Протипомпажний клапан 2 здійснює перепуск газу з вихідного тракту у вхідний, тим самим забезпечуючи стійку роботу компресора 1. 2 UA 98843 C2 5 10 На фіг. 2 представлений один з можливих варіантів відображення розмірних газодинамічних характеристик компресора і положення робочої точки компресора, що характеризує поточний технологічний процес. На фіг. 3 представлена блок-схема побудови програми протипомпажного регулювання. Сигнали, отримані з датчиків, завдання на підтримку запасу по помпажу, що надійшло з інтерфейсу управління, настроювальні коефіцієнти, що характеризують параметри газу, мірної шайби, протипомпажного клапана, команди - надходять на вхід програми регулювання. Виконується контроль справності каналів, належності їх допустимому діапазону. Після прийняття дискретних і аналогових сигналів програма протипомпажного регулювання проводить необхідні обчислення. Один з можливих варіантів визначення запасу по помпажу використовувати коефіцієнт витрати. В цьому випадку обчислюються об'ємна витрата газу за умовами всмоктування на мірній шайбі компресора, коефіцієнт витрати і запас по помпажу. Поточний коефіцієнт витрати обчислюється за формулою: 0 15 f ( v вх ) 4 Vвх ; 2 D3 nC 2 3 де Vвx - продуктивність компресора, м /хв.; nСТ - оберти силової турбіни; D2 - діаметр робочого колеса компресора. Запас по помпажу залежно від коефіцієнта витрати розраховується по формулі: ЗПП(%) 0 0 100; 0 20 25 30 35 40 45 50 де Ф0Т - поточне значення коефіцієнта витрати. Ф0П - помпажне значення коефіцієнта витрати (значення на лінії межі помпажу). Помпажне значення коефіцієнта витрати визначається при перерахунку безрозмірних характеристик проточної частини даного компресора в розмірні і корегується за результатами протипомпажних тестів. Різниця сигналів розрахованого запасу по помпажу та задання на підтримку помпажного запасу перетворюється згідно з перетворюючою функцією, один з можливих варіантів задання якої представлено на фіг.4, та подається на вхід контуру ПІД-регулювання. Після розрахунку вихідного сигналу ПІД-регулятора визначається величина зміни сигналу, різниця отриманого поточного виходу ПІД-регулятора і виходу ПІД-регулятора, сформованого на попередньому кроці, напрямок зміни сигналу, а також величина обмежувального сигналу. Значення обмежувального сигналу ПІД-регулятора розраховується як значення діапазону зміни виходу ПІД-регулятора, помножене на час між попереднім і поточним періодом перерахунку програми, поділене на задану константу обмеження швидкості закриття клапана. У випадку, якщо вихід ПІД-регулятора змінився у бік закриття і величина зміни більша величини обмежувального сигналу, проводиться корегування виходу ПІД-регулятора. Вихід ПІДрегулятора при цьому формується як значення на попередньому кроці мінус (плюс) набуте значення ділення (обмежувальне значення зміни величини сигналу). Величину обмеження швидкості закриття клапана можна також задати у вигляді функції від положення робочої точки компресора. Один з можливих варіантів такої функції представлений на фіг.5. Величина обмежувального сигналу змінюється в межах між максимальним і мінімальним значенням. Із збільшенням відстані робочої точки від межі помпажу дозволена швидкість закриття клапана зростає. Після досягнення безпечної віддаленості робочої точки від межі помпажу значення обмеження швидкості закриття залишається постійним та рівним максимальному значенню. Спосіб, що заявляється, може бути реалізований на будь-якому з промислових контролерів, що забезпечують перерахунок програми за час, який не перевищує 20 мс. Наприклад, контролери GE Fanuc серії RX3i або RX7i фірми "General Electric". Використовуються датчики тиску "Metrix" або "Honeywell", датчики температури ТСП або ТСМ, засіб виміру оборотів - плата VME-360, яка вмонтовується безпосередньо до основного кошика контролера. Спосіб, що заявляється, випробуваний на стенді. При випробуванні був задіяний контроллер RX7i. Вхідні сигнали формувалися моделлю компресора з протипомпажним клапаном, виконаною на ПК і підключеною до контролера по мережі Ethernet. ФОРМУЛА ВИНАХОДУ 55 1. Спосіб протипомпажного регулювання і захисту компресора від помпажу шляхом виміру тиску і температури газу на вході і виході компресора, перепаду тиску газу на мірній шайбі, виміру 3 UA 98843 C2 5 10 15 частоти обертання ротора компресора, розрахунку по зміряних величинах положення робочої точки компресора, формуванням сигналу управління на протипомпажний клапан замкнутим контуром ПІД (пропорційно-інтегрально-диференційне) регулювання, який відрізняється тим, що різниця між заданням на регулювання і положенням робочої точки перетворюється по заздалегідь заданій функції і після цього потрапляє на вхід ПІД-регулятора, формується сигнал управління, визначається напрямок його зміни, а також виконується обмеження, на кожному циклі перерахунку, величини зміни сигналу управління в бік закриття протипомпажного клапана обмежуючим розрахунковим значенням. 2. Спосіб протипомпажного регулювання і захисту компресора за п. 1, який відрізняється тим, що коефіцієнти ПІД-регулятора визначаються при налаштуванні конкретного контуру з умови найбільш точної підтримки заданої величини запасу по помпажу на сталому режимі, а перетворення положення робочої точки в зоні безпеки проводиться до забезпечення повного відкриття протипомпажного клапана при досягненні робочої точки межі помпажу. 3. Спосіб протипомпажного регулювання і захисту компресора за п. 1, який відрізняється тим, що коефіцієнти ПІД-регулятора визначаються при налаштуванні конкретного контуру з умови максимальної швидкодії контуру при збереженні стійкості процесу, значення максимальної швидкості закриття клапана встановлюється з умови аперіодичності повернення робочої точки на лінію регулювання. 4 UA 98843 C2 5 UA 98843 C2 Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for antisurge control and protection of compressor
Автори англійськоюSerheiev Serhii Pavlovych, Novikov Oleh Hryhorovych, Kostian Ihor Ivanovych
Назва патенту російськоюСпособ противопомпажной регулировки и защиты компрессора
Автори російськоюСергеев Сергей Павлович, Новиков Олег Григорьевич, Костян Игорь Иванович
МПК / Мітки
МПК: F04D 27/02
Мітки: протипомпажного, регулювання, компресора, захисту, спосіб
Код посилання
<a href="https://ua.patents.su/8-98843-sposib-protipompazhnogo-regulyuvannya-i-zakhistu-kompresora.html" target="_blank" rel="follow" title="База патентів України">Спосіб протипомпажного регулювання і захисту компресора</a>
Спосіб захисту компресора від помпажу
Номер патенту: 52128
Опубліковано: 16.12.2002
Автори: Бобков Володимир Юрійович, Спіченков Юрій Миколайович, Гіренко Сергій Генадійович
МПК: F04D 27/02
Мітки: спосіб, помпажу, компресора, захисту
Формула / Реферат:
Спосіб захисту компресора від помпажу, згідно з яким вимірюють комплекс параметрів, які характеризують робочий режим компресора, визначають по ньому координати робочої точки компресора, визначають віддаленість їх від заданої величини і пропорційно їй змінюють стан органів управління компресора, а саму задану величину коректують в момент початку помпажу заміною старого значення на поточне значення координат робочої точки компресора, який...
Пристрій для захисту від помпажу компресора
Номер патенту: 2640
Опубліковано: 15.07.2004
Автори: Бандура Іван Миколайович, Колеснікова Оксана Віталіївна, Крайнюк Олена Анатоліївна
МПК: F04D 27/02
Мітки: захисту, компресора, пристрій, помпажу
Формула / Реферат:
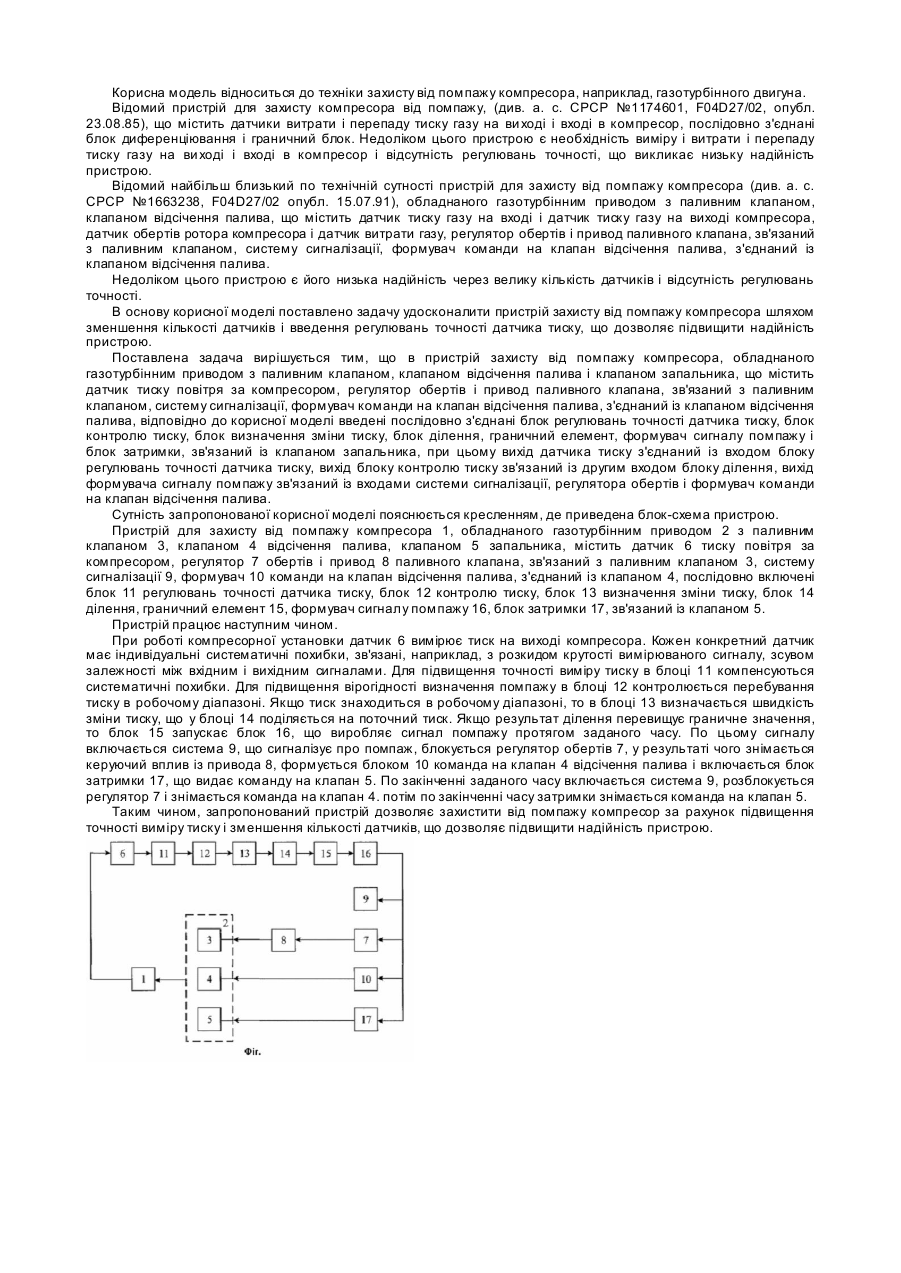
Пристрій для захисту від помпажу компресора, обладнаного газотурбінним приводом з паливним клапаном, клапаном відсічення палива і клапаном запальника, що містить датчик тиску повітря за компресором, регулятор обертів і привод паливного клапана, зв'язаний з паливним клапаном, систему сигналізації, формувач команди на клапан відсічення палива, з'єднаний із клапаном відсічення палива, який відрізняється тим, що в нього введені послідовно...
Спосіб регулювання продуктивності компресора
Номер патенту: 53650
Опубліковано: 17.02.2003
Автори: Романченко Сергій Володимирович, Назаренко Михайло Володимирович, Савицький Олександр Іванович, Назаренко Володимир Михайлович
МПК: F04D 27/00
Мітки: компресора, спосіб, продуктивності, регулювання
Формула / Реферат:
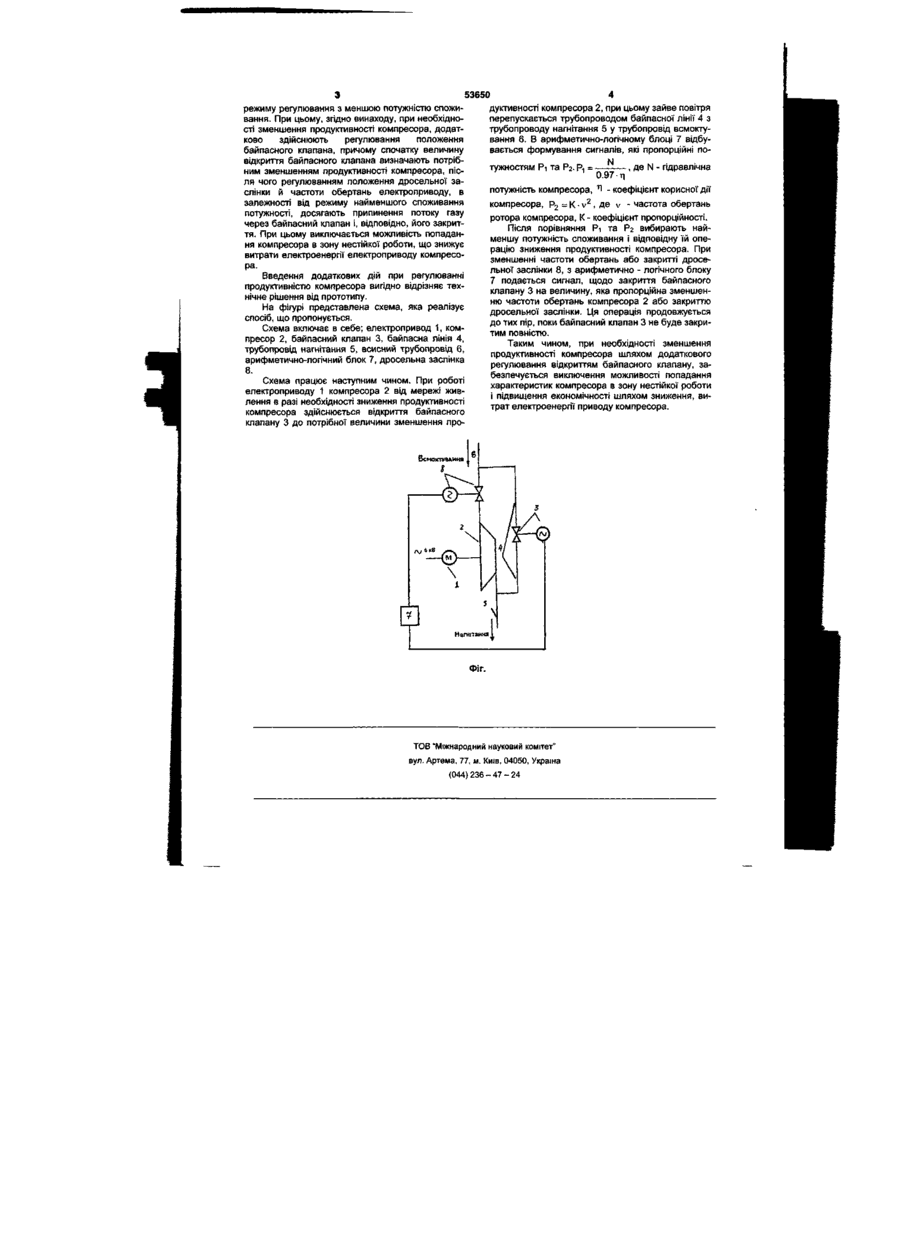
Спосіб регулювання продуктивності компресора, який включає порівняння потужності, яка споживається електроприводом при регулюванні частоти обертань, і потужності, яка потребується електроприводу при регулюванні зміни положення дросельної заслінки, та, за результатами порівняння, вибір режиму регулювання з меншою потужністю споживання, який відрізняється тим, що при необхідності зменшення продуктивності компресора додатково здійснюють...
Спосіб захисту компресора газоперекачувального агрегату від помпажу
Номер патенту: 47153
Опубліковано: 17.06.2002
Автори: Котляров Володимир Олегович, Дістрянов Сергій Володимирович, Сорокін Олександр Олександрович, Колодяжний Валерій Васильович, Хохряков Михайло Вікторович, Дудко Павло Григорович
МПК: F04D 27/02
Мітки: спосіб, помпажу, компресора, газоперекачувального, агрегату, захисту
Формула / Реферат:
Спосіб захисту компресора газоперекачувального агрегату від помпажу шляхом вимірювання поточних значень параметрів, які характеризують положення робочої точки компресора, уточнення та запам'ятовування положення межі помпажу і формування вихідного сигналу антипомпажного регулятора пропорційно віддаленості робочої точки компресора від межі помпажу, який відрізняється тим, що уточнення положення межі помпажу проводять, використовуючи...
Спосіб захисту компресора газоперекачувального агрегату від помпажу
Номер патенту: 5427
Опубліковано: 15.03.2005
Автори: Чепурний Олександр Петрович, Дістрянов Сергій Володимирович, Слесар Петро Федорович, Доценко Андрій Іванович, Хохряков Михайло Вікторович, Соляник Володимир Григорович, Колодяжний Валерій Васильович
МПК: F04D 27/02
Мітки: компресора, помпажу, агрегату, спосіб, газоперекачувального, захисту
Формула / Реферат:
Спосіб захисту компресора газоперекачувального агрегату від помпажу шляхом вимірювання поточних значень параметрів, що характеризують положення робочої точки компресора, уточнення і запам'ятовування положення межі помпажу і формування вихідного сигналу антипомпажного регулятора пропорційно віддаленості робочої точки компресора від межі помпажу, який відрізняється тим, що уточнення положення межі помпажу виконують шляхом виявлення переходу...
Попередній патент: Безперервність якості обслуговування
Наступний патент: Спосіб виготовлення бактеріального препарату для підвищення продуктивності молодняку жуйних тварин та консервування кормів
Випадковий патент: Абразивна паста