Двигун-маховик
Номер патенту: 107272
Опубліковано: 10.12.2014
Автори: Маринич Юрій Михайлович, Збруцький Олександр Васильович, Гуменюк Юрій Михайлович

Формула / Реферат
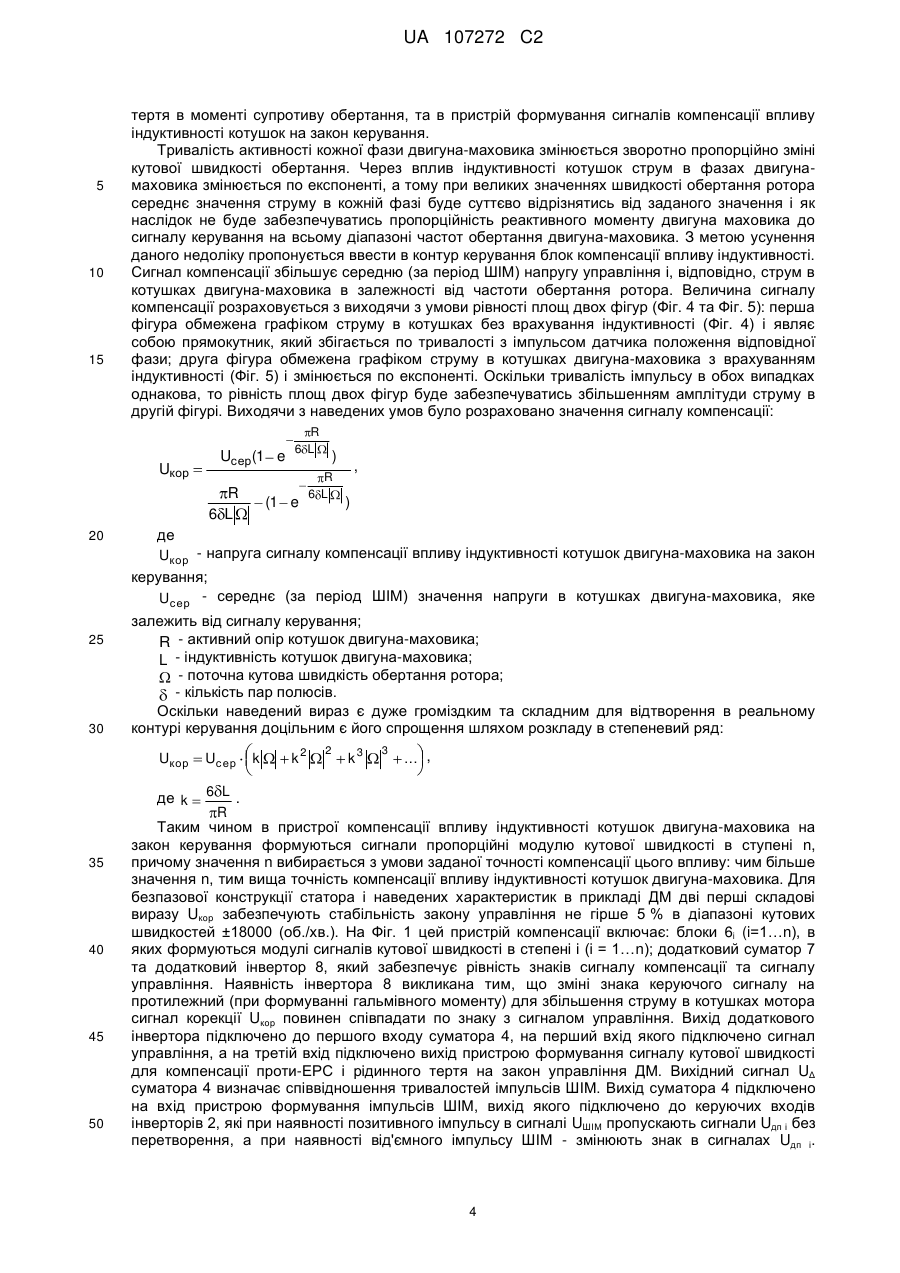
Двигун-маховик, який містить магнітну систему на роторі з постійними магнітами та перетворювачі Холла, зв'язані потоком індукції з постійними магнітами, безпазовий статор, пристрій комутації фаз статора, який містить ключовий підсилювач потужності, пристрої формування імпульсних сигналів датчиків положення ротора, підключених до входу пристрою формування сигналу кутової швидкості і до входів керованих інверторів, виходи яких підключені до керуючих входів ключів підсилювача, суматор, один з виходів якого призначений для підключення системи управління, на другий вхід підключений вихід пристрою формування сигналу кутової швидкості, а вихід суматора підключений до входу пристрою формування імпульсів широтно-імпульсної модуляції (ШІМ), вихід якого підключений до керуючих входів інверторів, який відрізняється тим, що на виході пристрою формування сигналу кутової швидкості включено пристрій корекції, який містить блок формування множини n (n=1, 2, 3,…) сигналів, пропорційних модулю кутової швидкості в ступені n, a його виходи підключені до входів додаткового суматора, на виході якого включено додатковий керований інвертор, керуючий вхід якого призначений для підключення системи керування, а вихід включено на третій вхід суматора.
Текст
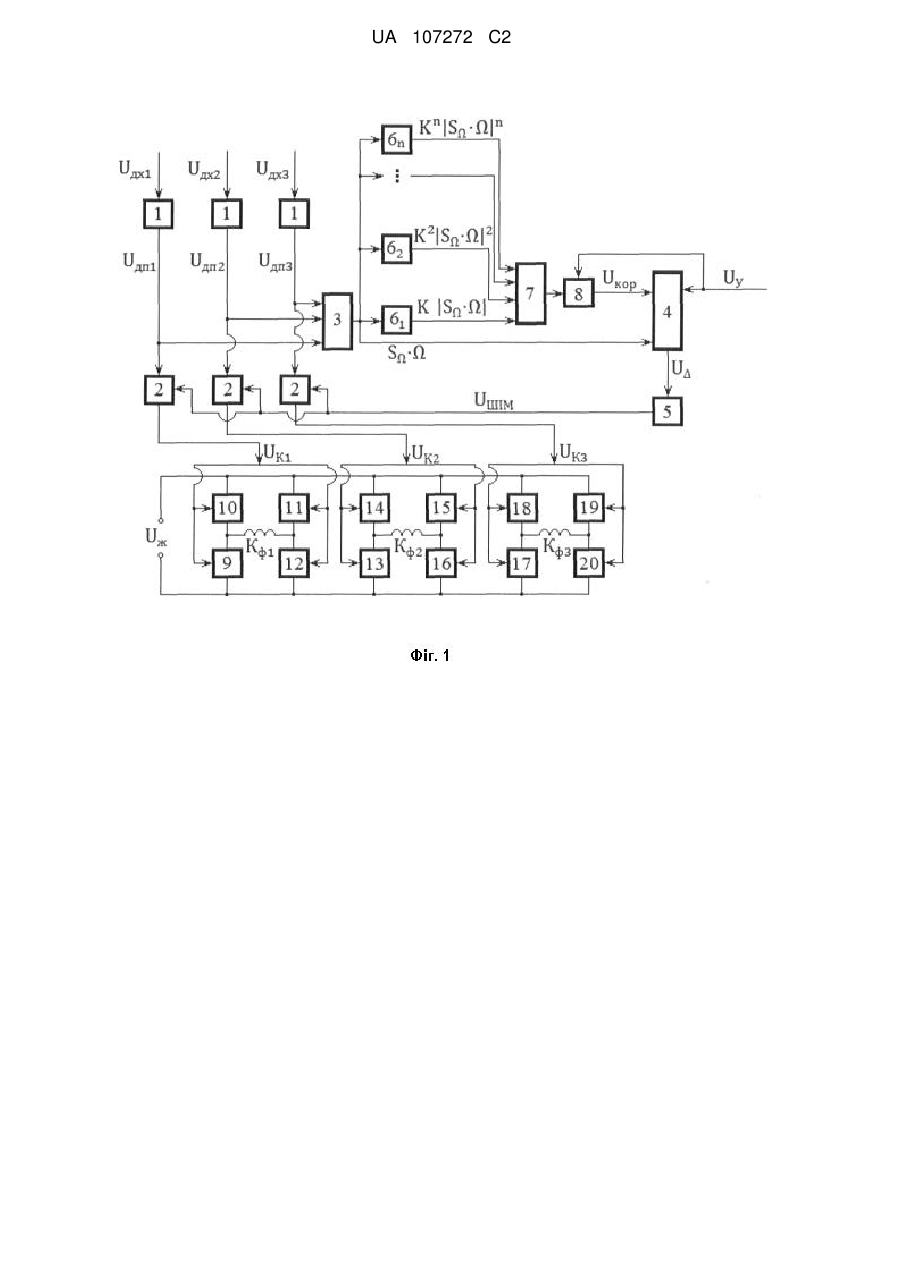
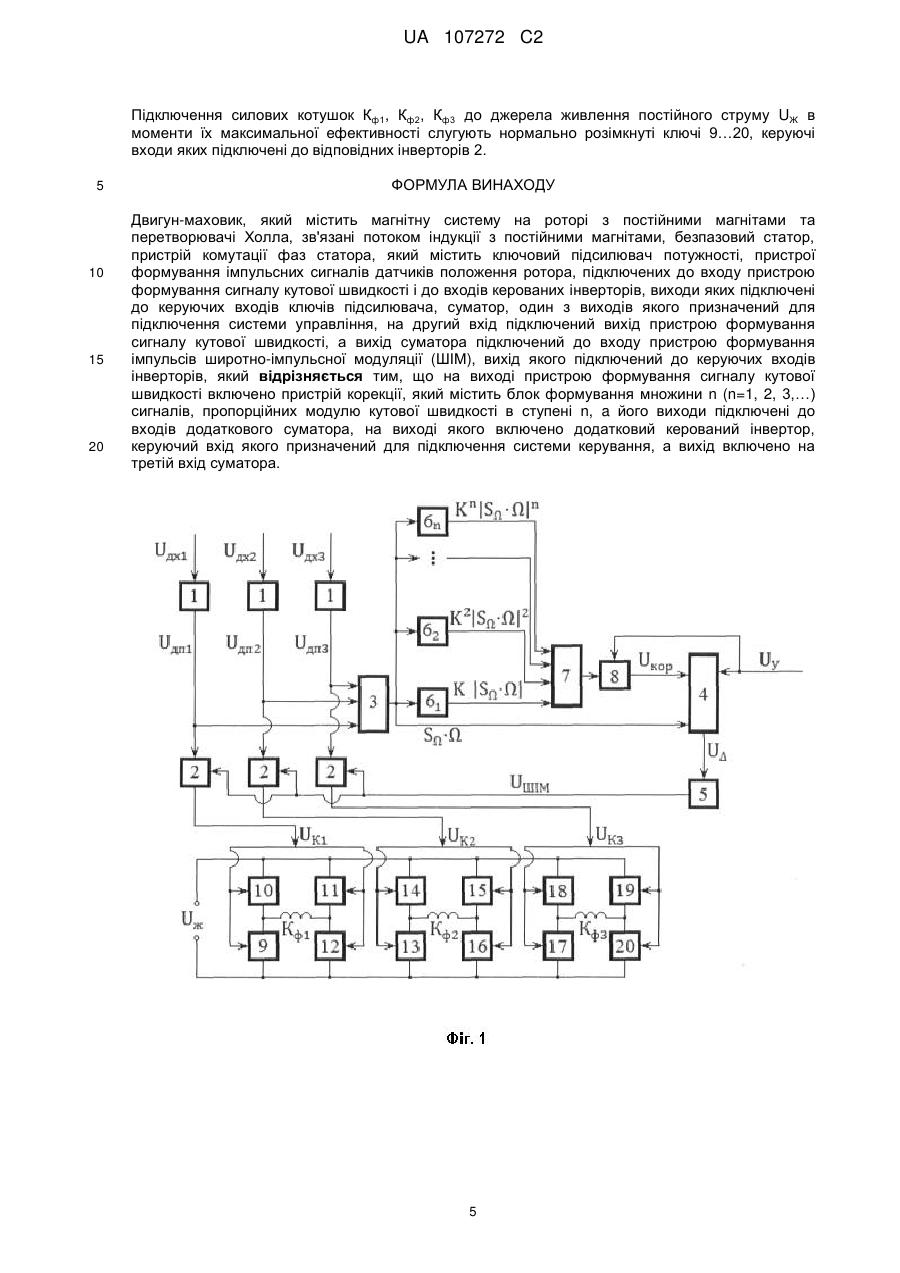
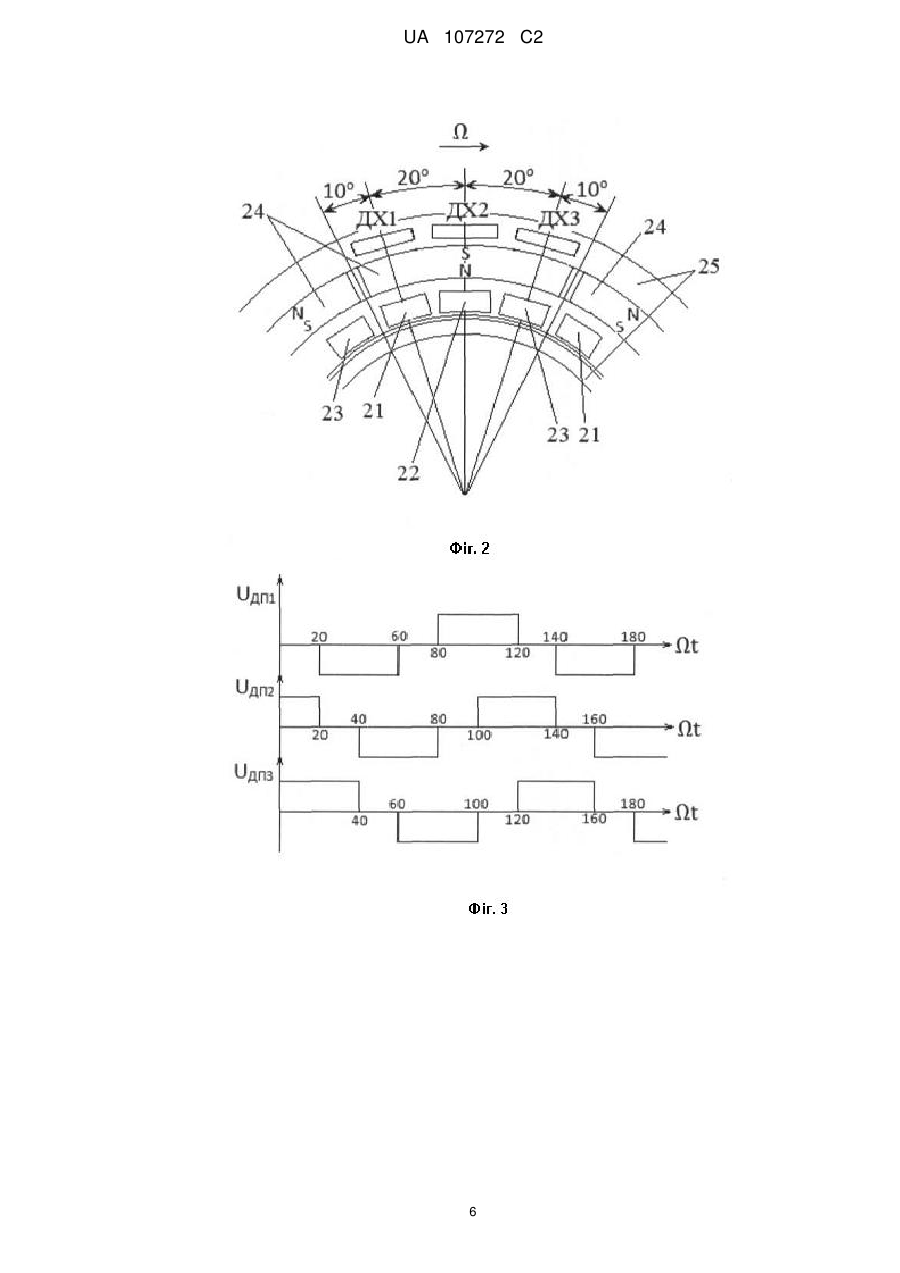
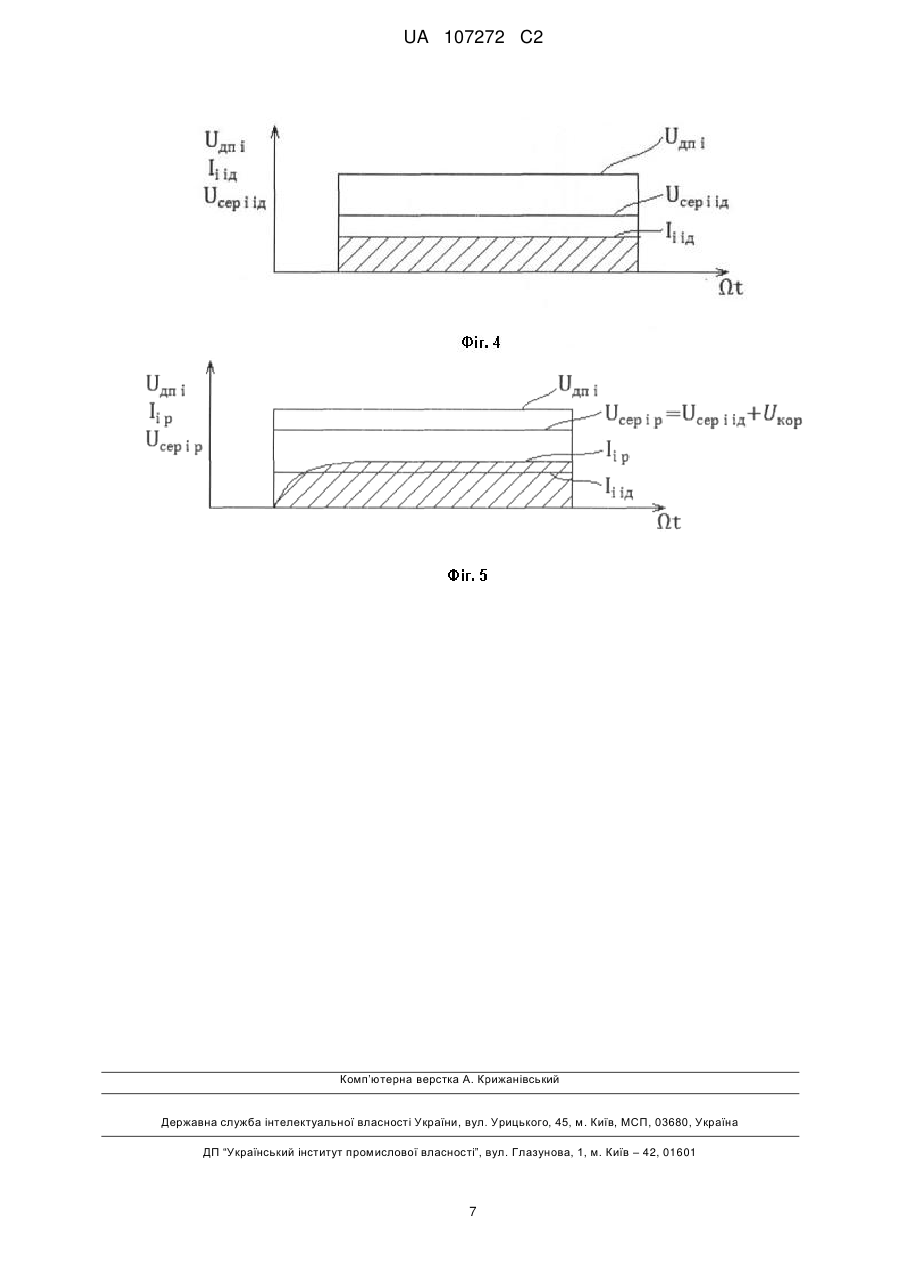
Реферат: Винахід належить до двигунів-маховиків - виконавчих елементів в системах орієнтації та стабілізації кутовим рухом супутника. Двигун-маховик містить магнітну систему на роторі з постійними магнітами та перетворювачі Холла, зв'язані потоком індукції з постійними магнітами, безпазовий статор, пристрій комутації фаз статора, пристрої формування імпульсних сигналів датчиків положення ротора, підключених до входу пристрою формування сигналу кутової швидкості і до входів керованих інверторів, виходи яких підключені до керуючих входів ключів підсилювача, суматор, пристрій формування імпульсів широтно-імпульсної модуляції (ШІМ), інвертори. Згідно з винаходом, на виході пристрою формування сигналу кутової швидкості включено пристрій корекції, який містить блок формування множини n (n=1, 2, 3,…) сигналів, пропорційних модулю кутової швидкості в ступені n, a його виходи підключені до входів додаткового суматора. На виході суматора включено додатковий керований інвертор. Запропонований винахід дозволяє в двигуні-маховику з єдиним для всіх фаз перетворювачем код-ШІМ компенсувати вплив індуктивності силових котушок двигуна-маховика на закон керування з наперед заданою точністю у всьому діапазоні частот обертання ротора двигунамаховика. UA 107272 C2 (12) UA 107272 C2 UA 107272 C2 5 10 15 20 25 30 35 40 45 50 55 Винахід належить до двигунів-маховиків-виконавчих елементів в системах орієнтації та стабілізації кутовим рухом супутника. Відомо безконтактний електродвигун постійного струму за патентом РФ № 2420851 С1, МПК Н02K29/08, Н02Р6/14, Н02Р6/16, дата публікації 10.06.2011 р., який було прийнято за аналог і який містить постійний магніт ротора, потоком індукції зв'язаний з трьома перетворювачами Холла, що включають формувачі сигналів датчиків положення для кожної фази, три обмотки статора, перші виводи котрих підключені до відповідних виходів транзисторних підсилювачів, а другі виводи об'єднані та призначені для підключення до полюсу джерела живлення, логічний перетворювач, виходами зв'язаний через відповідні інвертори з входами транзисторних підсилювачів. Недоліком зазначеного аналога є те, що при формуванні струмів в фазах електродвигуна використовуються транзисторні підсилювачі потужності, які призводять до значних втрат енергії, що не припустимо для двигунів-маховиків, які застосовуються в областях техніки з обмеженими енергетичними ресурсами. Відмовитись від аналогових підсилювачів потужності та підвищити економічність електродвигуна дозволяє керування на основі широтно-імпульсної модуляції (ШІМ), яка знайшла широке застосування при побудові двигунів-маховиків. Як найближчий аналог вибрано "Двигун-маховик для управління кутовим рухом супутника" (Маринич Ю.М., Збруцький О.В., Механіка гіроскопічних систем. 2011. Випуск 23. - С. 68-75). Він включає двигун-маховик, який містить магнітну систему на роторі з постійними магнітами та перетворювачі Холла, зв'язані потоком індукції з постійними магнітами, безпазовий статор, пристрій комутації фаз статора, який містить ключовий підсилювач потужності, пристрої формування імпульсних сигналів датчиків положення ротора, підключених до входу пристрою формування сигналу кутової швидкості і до входів керованих інверторів, виходи яких підключені до керуючих входів ключів підсилювача, суматор, один з виходів якого призначений для підключення системи керування (зовнішнього сигналу управління з супутника), на другий вхід підключений вихід пристрою формування сигналу кутової швидкості, а вихід суматора підключений до входу пристрою формування імпульсів ШІМ, вихід якого підключений до керуючих входів інверторів. В найближчому аналогу на прикладі двофазного безколекторного двигуна постійного струму (БДПС) показано загальний принцип побудови двигуна-маховика (ДМ) з використанням одного пристрою формування імпульсів ШІМ для управління всіма фазами мотора. Для цього сигнали датчика положення (ДП), які створюються для кожної фази пристроєм формування сигналів ДП, і являють собою послідовність прямокутних імпульсів (типу меандр) постійної амплітуди, а частота слідування імпульсів визначається кількістю пар полюсів магнітної системи та поточною кутовою швидкістю ротора, повинні відповідати наступним вимогам: - в час протяжності імпульсу в сигналі ДП відповідної фази, в ній за допомогою ШІМ та ключового підсилювача потужності створюється середня (за період ШІМ) напруга управління, яка породжує струм і магнітоелектричний момент (зміна знаку імпульсу в сигналі ДП повинна змінювати знак струму); - в час протяжності імпульсу у відповідній фазі, робочі частини котушок статора цієї фази повинні знаходитись в зоні квазіпостійної індукції магнітної системи ротора, що дає незалежність магнітоелектричного моменту фази в межах імпульсу від кута повороту ротора; - в кожний момент часу кількість фаз, які створюють магнітоелектричний момент повинна бути постійною, що дає незалежність магнітоелектричного моменту мотору від кута повороту ротора. Протяжність імпульсів в сигналах ДП і кількість фаз одночасно утворюючих момент обертовий момент залежить від кількості фаз мотора, наприклад, для двохфазного мотора одна фаза створює момент в кожний момент часу, а тривалість імпульсу - 90 електричних градусів, кут між сусідніми імпульсами та фазовий кут між імпульсами сусідньої фази теж дорівнює 90 електричних градусів. Для трифазного мотора протяжність імпульсів - 120 електричних градусів, 60 електричних градусів - кутовий проміжок між сусідніми імпульсами та кут фазового зміщення між сусідніми фазами в сигналах ДП. Для зменшення впливу напруги проти-ЕРС та рідинного тертя (в моменті супротиву обертанню) на струм в фазах і, відповідно, на закон керування ДМ в прототипі використовується ланка, яка включає пристрій формування сигналу кутової швидкості (частотомір) включений на вхід суматора, який керує пристроєм формування імпульсів ШІМ. Ця ланка дозволяє збільшувати середню напругу управління в кожній фазі пропорційно швидкості обертання ротора, що при узгодженні коефіцієнтів компенсує вплив проти-ЕРС та рідинного тертя на створюваний в ДМ реактивний момент. 1 UA 107272 C2 5 10 15 20 25 30 35 40 45 50 55 Недоліком прототипу є те, що індуктивність котушок фаз мотора впливає на стабільність закону керування ДМ, через затримку по фазі струму в фазах мотора відносно середньої (за період ШІМ) напруги управління, яка по формі співпадає з імпульсами ДП. Це призводить до того, що при одному значенні зовнішнього керуючого сигналу ДМ створює різні реактивні моменти, причому зі зростанням поточної кутової швидкості ротора реактивний момент зменшується, тобто руйнується закон керування ДМ - забезпечення пропорційності між зовнішнім сигналом керування та створюваним реактивним моментом. Задачею, на вирішення якої спрямований запропонований винахід, є компенсація впливу індуктивності силових котушок ДМ та забезпечення пропорційності між реактивним моментом ДМ і сигналом керування в широкому діапазоні частот обертання ротора. Поставлена задача вирішується тим, що двигун-маховик, який містить магнітну систему на роторі з постійними магнітами та перетворювачі Холла, зв'язані потоком індукції з постійними магнітами, безпазовий статор, пристрій комутації фаз статора, який містить ключовий підсилювач потужності, пристрої формування імпульсних сигналів датчиків положення ротора, підключених до входу пристрою формування сигналу кутової швидкості і до входів керованих інверторів, виходи яких підключені до керуючих входів ключів підсилювача, суматор, один з виходів якого призначений для підключення системи управління, на другий вхід підключений вихід пристрою формування сигналу кутової швидкості, а вихід суматора підключений до входу пристрою формування імпульсів ШІМ, вихід якого підключений до керуючих входів інверторів, на виході пристрою формування сигналу кутової швидкості включено додатковий пристрій корекції, який містить блок формування суми n (n=1, 2, 3,…) сигналів, пропорційних модулю кутової швидкості в ступені n, а його виходи підключені до входів додаткового суматора, на виході якого включено додатковий керований інвертор, керуючий вхід якого призначений для підключення системи управління, а вихід включено на третій вхід суматора. На Фіг. 1 зображено схему перетворення інформації і ключовий підсилювач. На Фіг. 2 зображено сектор шестиполюсного трифазного БДПС. На Фіг. 3 зображено епюри сигналів UДП1, UДП2, UДП3 відповідних датчиків положення ротора ДП1, ДП2, ДП3. На Фіг. 4 показані епюри напруг і струму в фазі при відсутності (ідеалізована модель) індуктивності фаз. На Фіг. 5 показані епюри напруг і струму в фазі при наявності індуктивності фаз. На Фіг. 1 зображено схема управління для трифазного БДПС, яка містить пристрої формування сигналів датчиків положення 1 для кожної фази, виходи яких включені до входів керованих інверторів 2 та пристрою формування сигналу кутової швидкості 3. Вихід блока 3 подається на один з входів суматора 4 для компенсації впливу проти-ЕРС і рідинного тертя на закон управління ДМ. Вихід блока 3 також подається на вхід пристрою компенсації впливу індуктивності котушок ДМ на закон управління. Цей пристрій компенсації складається з блоків 6і (i=1…n), в яких формуються модулі сигналів кутової швидкості в ступені і (і=1…n), а їх виходи включені на входи додаткового суматора 7, вихід якого включений до входу керованого інвертора 8, на керований вхід якого подається сигнал керування, що забезпечує збіг знаків сигналу компенсації (Uкор) впливу індуктивності котушок ДМ на закон управління та сигналу керування. Вихід керованого інвертора 8 включено на другий вхід суматора 4, а на його третій вхід включено сигнал керування Uy. Суматор 4 формує сигнал UΔ, який включений на вхід пристрою формування імпульсів ШІМ 5 і визначає тривалість імпульсу ШІМ. Сформовані в блоці 6 імпульси ШІМ подаються на керуючі входи керованих інверторів 2, які при наявності позитивного імпульсу в сигналі UШІМ пропускають сигнали датчиків положення без перетворення, а при наявності від'ємного знака імпульсу ШІМ змінюють знак в сигналах датчиків положення на протилежний. Таким чином формуються сигнали керування UKi (i=1, 2, 3) для відповідної фази двигуна і подаються на ключовий підсилювач потужності, який складається з нормально розімкнутих ключів 9…20 та джерела живлення постійного струму UЖ. Ключовий підсилювач потужності працює наступним чином: при появі позитивного імпульсну в сигналах керування UKi (i=1, 2, 3) замикаються парні ключі і котушки ДМ підключаються до джерела живлення UЖ, якщо сигнали UKi (і = 1, 2, 3) мають від'ємне значення, то замикаються непарні ключі, а парні - розмикаються, і струм в котушках ДМ протікає в протилежному напрямку. Розглянемо схему конструкції ДМ, побудованого на базі безколекторного трифазного шестиполюсного двигуна постійного струму з безпазовим статором, яким керує схема, зображена на Фіг. 1. Взаємне розташування елементів конструкції ДМ схематично показане на Фіг. 2. Він містить магнітопроводи 25, які обертаються разом з ротором, перетворювачі Холла ДХ1, ДХ2, ДХ3 закріплені на корпусі і зв'язані потоком індукції з радіально намагніченими 2 UA 107272 C2 5 10 15 20 25 30 35 40 45 50 55 постійними магнітами 24, розташованими на роторі, котушки фаз статора, робочі витки відповідних фаз показані на Фіг. 2в розрізі (21 - перша фаза, 22 - друга фаза, 23 - третя фаза). Сигнали датчиків положення ротора UДП1, UДП2, UДП3 (Фіг. 3) формуються з сигналів датчиків Хола (в пристроях формування сигналів ДП1, ДП2, ДП3 (Фіг. 1)) і являють собою послідовність імпульсних сигналів прямокутної форми на ділянках квазіпостійного магнітного поля в місці розташування робочих котушок кожної фази. Оскільки розглядається шестиполюсний безколекторний двигун постійного струму, то сектор одного постійного магніту ротора складає 60 кутових градусів, при цьому ділянка квазіпостійного магнітного поля для кожного з шести постійних магнітів ротора перевищує 40 кутових градусів. При початковому взаємному розташуванні ротора двигуна маховика відносно датчиків положення (як показано на Фіг. 2) і при напрямку обертання ротора за годинниковою стрілкою з кутовою швидкістю Ω, на виході датчиків положення ДП1, ДП2, ДП3 будуть формуватись три послідовності прямокутних імпульсів UДП1, UДП2, UДП3 (Фіг. 3), які відповідають проміжку активності відповідної фази двигунамаховика. В початковий момент часу (зображений на Фіг. 3 відбувається комутація 1 і 3 фаз, фаза 1 виходить із зони квазіпостійного магнітного поля, а фаза 3 входить в таку зону. Наступний момент комутації настає через 20° кута повороту ротора. Тоді фаза 2 відключається, а фаза 1 підключиться, і так як зміниться знак імпульсу в UДП1 то повинен змінитися і знак струму, і так далі. В сигналах UДП1, UДП2, UДП3 всі імпульси мають тривалість 40 кутових градусів і проміжок між сусідніми імпульсами 20 кутових градусів, що забезпечує в кожний момент часу роботу 2-х фаз з однаковим струмом на створення обертового моменту. Вплив індуктивності котушок ДМ на закон управління показано на Фіг. 4 та Фіг. 5. На Фіг. 4 показано сигнали середньої (за період ШІМ) напруги Uсер. і ід в і-й фазі в межах імпульсу UДПі та струм в ній - Іі ід для ідеалізованого випадку, коли індуктивність котушок фаз дорівнює нулю. Струм в такому випадку має прямокутну форму. В реальному випадку через вплив індуктивності котушок струм в фазах буде рости по експоненті, як показано на Фіг. 5. Для забезпечення постійності реактивного моменту в ДМ необхідно забезпечити рівність площ фігур, обмежених графіком струму, в ідеальному випадку та реальному випадку. Ці площі фігур заштриховані на Фіг. 4 та Фіг. 5. Для цього в контурі управління ДМ (Фіг. 1) формуються реальні сигнали струму І і р. та середньої напруги Ucep.i p… Сигнал корекції Uкop завжди збільшує значення середньої (за період ШІМ) напруги Uсер. і ід, а оскільки при формуванні гальмівного моменту сигнал управління і середня (за період ШІМ) напруга Uсер. і ід змінюють знак на протилежний, то і сигнал корекції Uкоp також має змінювати свій знак. Для цього в контурі управління (Фіг. 1) використовується керований інвертор 8 (на керуючий вхід якого подається сигнал управління), який забезпечує рівність знаків сигналу управління та сигналу корекції Uкоp. Двигун-маховик працює наступним чином. При появі сигналу управління на валу ДМ повинен бути сформований момент, пропорційний сигналу управління. Для цього використовується схема перетворення інформації і ключовий підсилювач потужності, які зображені на Фіг. 1. Така схема дозволяє компенсувати вплив на нестабільність закону управління ДМ індуктивності його фаз з будь-якою наперед заданою точністю. Розглянемо два етапи роботи ДМ. 1. Двигун не обертається 0 . На керуючий вхід ДМ надходить сигнал керування Uy. Сигнали положення ротора Uдп і (і = 1, 2, 3) надходять на входи керованих інверторів 2 та пристрій формування сигналу кутової швидкості 3. На виході пристрою формування сигналу кутової швидкості 3 сигнал буде відсутній (оскільки кутова швидкість обертання ротора Ω дорівнює нулю). Відповідно сигнал корекції Uкоp в блоках 6i (i=1…n), 7 та 8 формуватись не буде і струм в котушках ДМ буде мати прямокутну форму. Сигнал UΔ пропорційний сигналу управління поступає в пристрій формування імпульсів ШІМ 5. Сигнал UШІМ подається на керуючий вхід керованих інверторів 2, в яких формуються сигнали керування ключами 9…20, які підключають активні фази ДМ до джерела живлення UЖ. Двигун маховик починає обертатись. 2. Двигун обертається з деякою кутовою швидкістю Ω ≠ 0. Сигнали перетворювачів Хола (Uдхi, і = 1, 2, 3) подаються на вхід пристроїв формування сигналів датчиків положення 1, на виході яких формуються імпульсні сигнали положення ротора Uдп і (і = 1, 2, 3), що збігаються за часом з ефективністю відповідних фаз ДМ і мають вигляд як показано на Фіг. 3. Сигнали положення ротора Uдп і (і = 1, 2, 3) подаються на керовані інвертори 2 та пристрій формування сигналів кутової швидкості 3, який формує сигнал поточної кутової швидкості U , S S крутизна. Сигнал поточної кутової швидкості S подається на вхід суматора 4 і використовується для формування сигналу компенсації впливу проти-ЕРС в фазах та рідинного 3 UA 107272 C2 5 10 15 тертя в моменті супротиву обертання, та в пристрій формування сигналів компенсації впливу індуктивності котушок на закон керування. Тривалість активності кожної фази двигуна-маховика змінюється зворотно пропорційно зміні кутової швидкості обертання. Через вплив індуктивності котушок струм в фазах двигунамаховика змінюється по експоненті, а тому при великих значеннях швидкості обертання ротора середнє значення струму в кожній фазі буде суттєво відрізнятись від заданого значення і як наслідок не буде забезпечуватись пропорційність реактивного моменту двигуна маховика до сигналу керування на всьому діапазоні частот обертання двигуна-маховика. З метою усунення даного недоліку пропонується ввести в контур керування блок компенсації впливу індуктивності. Сигнал компенсації збільшує середню (за період ШІМ) напругу управління і, відповідно, струм в котушках двигуна-маховика в залежності від частоти обертання ротора. Величина сигналу компенсації розраховується з виходячи з умови рівності площ двох фігур (Фіг. 4 та Фіг. 5): перша фігура обмежена графіком струму в котушках без врахування індуктивності (Фіг. 4) і являє собою прямокутник, який збігається по тривалості з імпульсом датчика положення відповідної фази; друга фігура обмежена графіком струму в котушках двигуна-маховика з врахуванням індуктивності (Фіг. 5) і змінюється по експоненті. Оскільки тривалість імпульсу в обох випадках однакова, то рівність площ двох фігур буде забезпечуватись збільшенням амплітуди струму в другій фігурі. Виходячи з наведених умов було розраховано значення сигналу компенсації: Uкор Uсер(1 e R 6 L 20 25 30 R 6 L (1 e ) R 6 L , ) де Uкор - напруга сигналу компенсації впливу індуктивності котушок двигуна-маховика на закон керування; Uсер - середнє (за період ШІМ) значення напруги в котушках двигуна-маховика, яке залежить від сигналу керування; R - активний опір котушок двигуна-маховика; L - індуктивність котушок двигуна-маховика; - поточна кутова швидкість обертання ротора; - кількість пар полюсів. Оскільки наведений вираз є дуже громіздким та складним для відтворення в реальному контурі керування доцільним є його спрощення шляхом розкладу в степеневий ряд: Uкор Uсер k k2 2 k3 3 ... , 6 L . R Таким чином в пристрої компенсації впливу індуктивності котушок двигуна-маховика на закон керування формуються сигнали пропорційні модулю кутової швидкості в ступені n, причому значення n вибирається з умови заданої точності компенсації цього впливу: чим більше значення n, тим вища точність компенсації впливу індуктивності котушок двигуна-маховика. Для безпазової конструкції статора і наведених характеристик в прикладі ДМ дві перші складові виразу Uкop забезпечують стабільність закону управління не гірше 5 % в діапазоні кутових швидкостей ±18000 (об./хв.). На Фіг. 1 цей пристрій компенсації включає: блоки 6i (i=1…n), в яких формуються модулі сигналів кутової швидкості в степені і (і = 1…n); додатковий суматор 7 та додатковий інвертор 8, який забезпечує рівність знаків сигналу компенсації та сигналу управління. Наявність інвертора 8 викликана тим, що зміні знака керуючого сигналу на протилежний (при формуванні гальмівного моменту) для збільшення струму в котушках мотора сигнал корекції Uкop повинен співпадати по знаку з сигналом управління. Вихід додаткового інвертора підключено до першого входу суматора 4, на перший вхід якого підключено сигнал управління, а на третій вхід підключено вихід пристрою формування сигналу кутової швидкості для компенсації проти-ЕРС і рідинного тертя на закон управління ДМ. Вихідний сигнал UΔ суматора 4 визначає співвідношення тривалостей імпульсів ШІМ. Вихід суматора 4 підключено на вхід пристрою формування імпульсів ШІМ, вихід якого підключено до керуючих входів інверторів 2, які при наявності позитивного імпульсу в сигналі UШІМ пропускають сигнали Uдп і без перетворення, а при наявності від'ємного імпульсу ШІМ - змінюють знак в сигналах Uдп і. де k 35 40 45 50 4 UA 107272 C2 Підключення силових котушок Кф1, Кф2, Кф3 до джерела живлення постійного струму UЖ в моменти їх максимальної ефективності слугують нормально розімкнуті ключі 9…20, керуючі входи яких підключені до відповідних інверторів 2. 5 10 15 20 ФОРМУЛА ВИНАХОДУ Двигун-маховик, який містить магнітну систему на роторі з постійними магнітами та перетворювачі Холла, зв'язані потоком індукції з постійними магнітами, безпазовий статор, пристрій комутації фаз статора, який містить ключовий підсилювач потужності, пристрої формування імпульсних сигналів датчиків положення ротора, підключених до входу пристрою формування сигналу кутової швидкості і до входів керованих інверторів, виходи яких підключені до керуючих входів ключів підсилювача, суматор, один з виходів якого призначений для підключення системи управління, на другий вхід підключений вихід пристрою формування сигналу кутової швидкості, а вихід суматора підключений до входу пристрою формування імпульсів широтно-імпульсної модуляції (ШІМ), вихід якого підключений до керуючих входів інверторів, який відрізняється тим, що на виході пристрою формування сигналу кутової швидкості включено пристрій корекції, який містить блок формування множини n (n=1, 2, 3,…) сигналів, пропорційних модулю кутової швидкості в ступені n, a його виходи підключені до входів додаткового суматора, на виході якого включено додатковий керований інвертор, керуючий вхід якого призначений для підключення системи керування, а вихід включено на третій вхід суматора. 5 UA 107272 C2 6 UA 107272 C2 Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
Автори англійськоюMarinych Yurii Mykhailovych, Zbrutskyi Oleksandr Vasyliovych
Автори російськоюМаринич Юрий Михайлович, Збруцкий Александр Васильевич
МПК / Мітки
МПК: H02K 29/08
Мітки: двигун-маховик
Код посилання
<a href="https://ua.patents.su/9-107272-dvigun-makhovik.html" target="_blank" rel="follow" title="База патентів України">Двигун-маховик</a>
Двигун “колесо маховик”

Номер патенту: 28643
Опубліковано: 25.12.2007
Автор: Цюренко Валентин Андрійович
МПК: F03G 7/00, F16H 33/00
Мітки: двигун, маховик, колесо
Формула / Реферат:
1. Двигун, що складається з чотирьох секцій, які розміщені в ободі і зміщені на 30° відносно одна одної, а кожну секцію складають три труби, зігнуті посередині під кутом 120°, кінці кожних двох труб спарені, в кожній трубі розміщені два тягарі-важелі однакової ваги, з кожного кінця труби по одному тягарю-важелю, причому важелі однієї труби з'єднані гнучкою трубкою, заповненою рідиною, кінцівки всіх труб оснащені кришками.2. Двигун за...
Система керування безпілотним літальним апаратом
Номер патенту: 55410
Опубліковано: 10.12.2010
Автори: Кулік Анатолій Степанович, Таранова Світлана Ігорівна, Фірсов Сергій Миколайович, Нгуен Ван Тхінь
МПК: B64C 21/00
Мітки: літальним, система, керування, апаратом, безпілотним
Формула / Реферат:
Система керування безпілотним літальним апаратом, яка містить пристрій управління, електричний привід, вхід якого з'єднаний з виходом пристрою управління, датчик кутової швидкості, з'єднаний з першим входом пристрою управління, датчик кута, з'єднаний з другим входом пристрою управління, магнітний курс, висотомір, GPS, виходи яких підключені до третього, четвертого, пятого входів пристрою управління відповідно, яка відрізняється тим, що в неї...
Система керування безпілотним літальним апаратом
Номер патенту: 46179
Опубліковано: 10.12.2009
Автори: До Куок Туан, Кулік Анатолій Степанович, Фірсов Сергій Миколайович, Гусарова Ганна Григорівна
МПК: B64C 21/00
Мітки: система, безпілотним, апаратом, літальним, керування
Формула / Реферат:
Система керування безпілотним літальним апаратом, яка містить пристрій управління, електричний привід, з'єднаний з виходом пристрою управління, датчик кутової швидкості, з'єднаний з першим входом пристрою управління, датчик кута, з'єднаний з другим входом пристрою управління, яка відрізняється тим, що в неї введені магнітний курс, висотомір, GPS, виходи яких підключені до третього, четвертого, п'ятого входів пристрою управління...
Пристрій для керування асинхронним електроприводом
Номер патенту: 70074
Опубліковано: 15.09.2004
Автори: Кулік Анатолій Степанович, Лученко Олег Олексійович, Нарожний Віталій Васильович, Гісцова Тетяна Іванівна, Фірсов Сергій Миколайович
МПК: H02P 21/00
Мітки: асинхронним, керування, електроприводом, пристрій
Формула / Реферат:
Пристрій для керування асинхронним електроприводом, що складається з асинхронного двигуна, з'єднаного через пружну передачу з виконавчим механізмом, послідовно з'єднаних між собою регулятора швидкості, перетворювача координат і перетворювача енергії, вихід якого підключений до статорної обмотки асинхронного двигуна, датчика кута, механічно зв'язаного з ротором асинхронного двигуна, задатчика реактивного струму, вихід якого підключений до...
Акустичний детектор
Номер патенту: 66899
Опубліковано: 15.06.2004
Автори: Перепада Борис Антонович, Чернега Віктор Степанович, Федоров Вадим Валерійович
МПК: G01M 3/24
Мітки: детектор, акустичний
Формула / Реферат:
Акустичний детектор протікання трубопроводів, що містить послідовно з'єднані мікрофон, блок обробки сигналів, підсилювач потужності, регулятор гучності, головні телефони, який відрізняється тим, що в нього введені послідовно з'єднані аналізатор спектра, вхід якого з'єднаний з виходом підсилювача блока обробки сигналу, блок керування дисплейним індикатором і дисплейний індикатор, блок керування, з'єднаний з керуючим входом смугового фільтра,...
Попередній патент: Спосіб лікування аутизму та інших розладів аутистичного спектра препаратами клітин, виділених з матеріалу ембріофетального походження
Наступний патент: Пристрій для пресування труб
Випадковий патент: Склад вугільної шихти для одержання металургійного коксу