Пристрій для аероелектророзвідки
Номер патенту: 118669
Опубліковано: 28.08.2017

Формула / Реферат
Пристрій для аероелектророзвідки, що містить суміщені та ізольовані між собою генераторну та вимірювальну провідні петлі однакових розмірів, генератор синусоїдальної напруги або струму, варіометр, вимірювальний пристрій одного з двох параметрів: відношення квадратурної компоненти модуля напруженості вторинного магнітного поля до модуля напруженості первинного магнітного поля або фазового зсуву між напруженістю первинного магнітного поля та напруженістю сумарного (первинного та вторинного) магнітного поля та реєстратор результатів вимірювання, причому первинний навій варіометра та генераторна петля з'єднані між собою послідовно, перший вивід генератора під'єднаний до вільного виводу первинного навою варіометра, а другий вивід генератора під'єднаний до вільного виводу генераторної петлі, вторинний навій варіометра під'єднаний послідовно-зустрічно з вимірювальною петлею, причому вільний вивід вимірювальної петлі під'єднаний до загального виводу вимірювального пристрою, вільний вивід вторинного навою варіометра під'єднаний до першого входу вимірювального пристрою, а точка з'єднання вимірювальної петлі та вторинного навою варіометра під'єднана до другого входу вимірювального пристрою, вихід вимірювального пристрою під'єднано до входу реєстратора результатів вимірювання, який відрізняється тим, що додатково містить жорсткий ізоляційний каркас у вигляді квадрата чи прямокутника, в якому розміщені генераторна та вимірювальна петлі, множину безпілотних літальних апаратів, до яких підвішено каркас з розміщеними в ньому генераторною та вимірювальною петлями, комп'ютерні засоби керування та синхронізації роботи безпілотних літальних апаратів, пульт дистанційного управління безпілотними літальними апаратами та зчитування даних з реєстратора результатів вимірювання, засоби безпроводового автоматичного зв'язку безпілотних літальних апаратів та реєстратора результатів вимірювання з пультом дистанційного управління безпілотними літальними апаратами та зчитування даних з реєстратора результатів вимірювання, причому генератор, варіометр, вимірювальний пристрій, реєстратор результатів вимірювання та засоби безпроводового автоматичного зв'язку безпілотних літальних апаратів та реєстратора результатів вимірювання розташовують на безпілотних літальних апаратах, причому програмне забезпечення пульта дистанційного управління забезпечує виконане так, що забезпечує синхронну роботу всіх безпілотних апаратів на всіх стадіях роботи: при зльоті, приземленні, під час горизонтального польоту та при маневруванні, зокрема при зміні курсу та висоти польоту тощо.
Текст
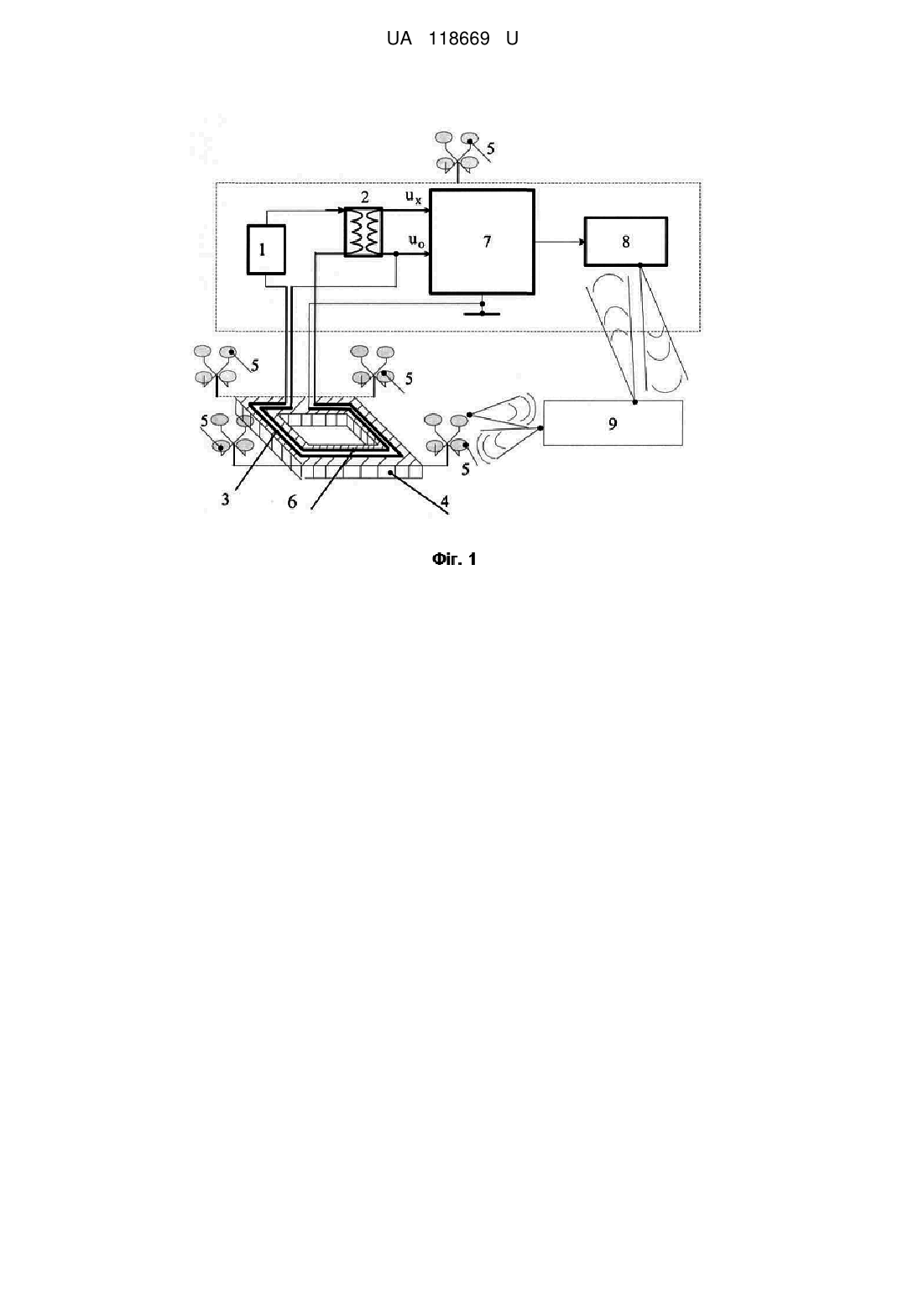
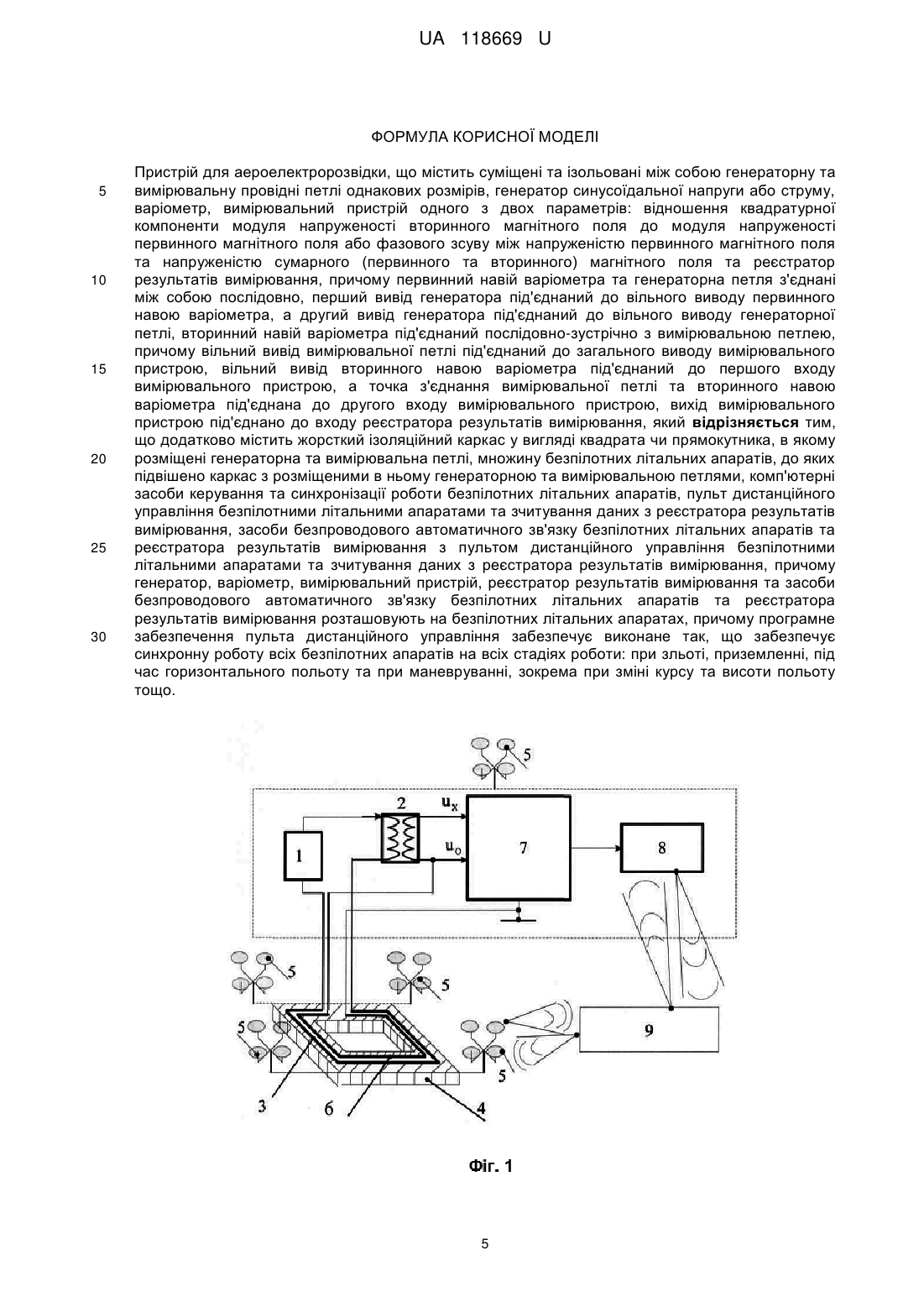
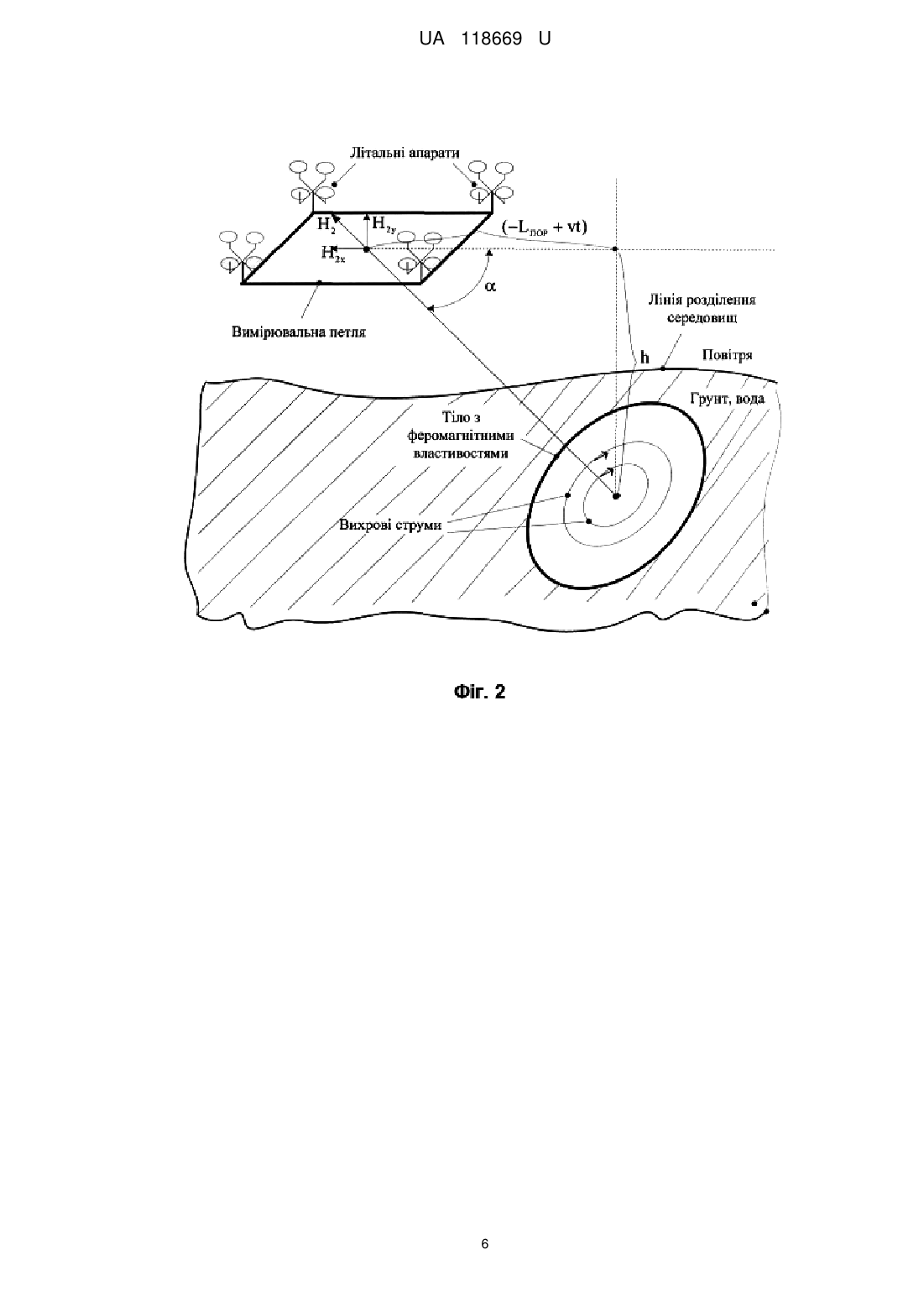
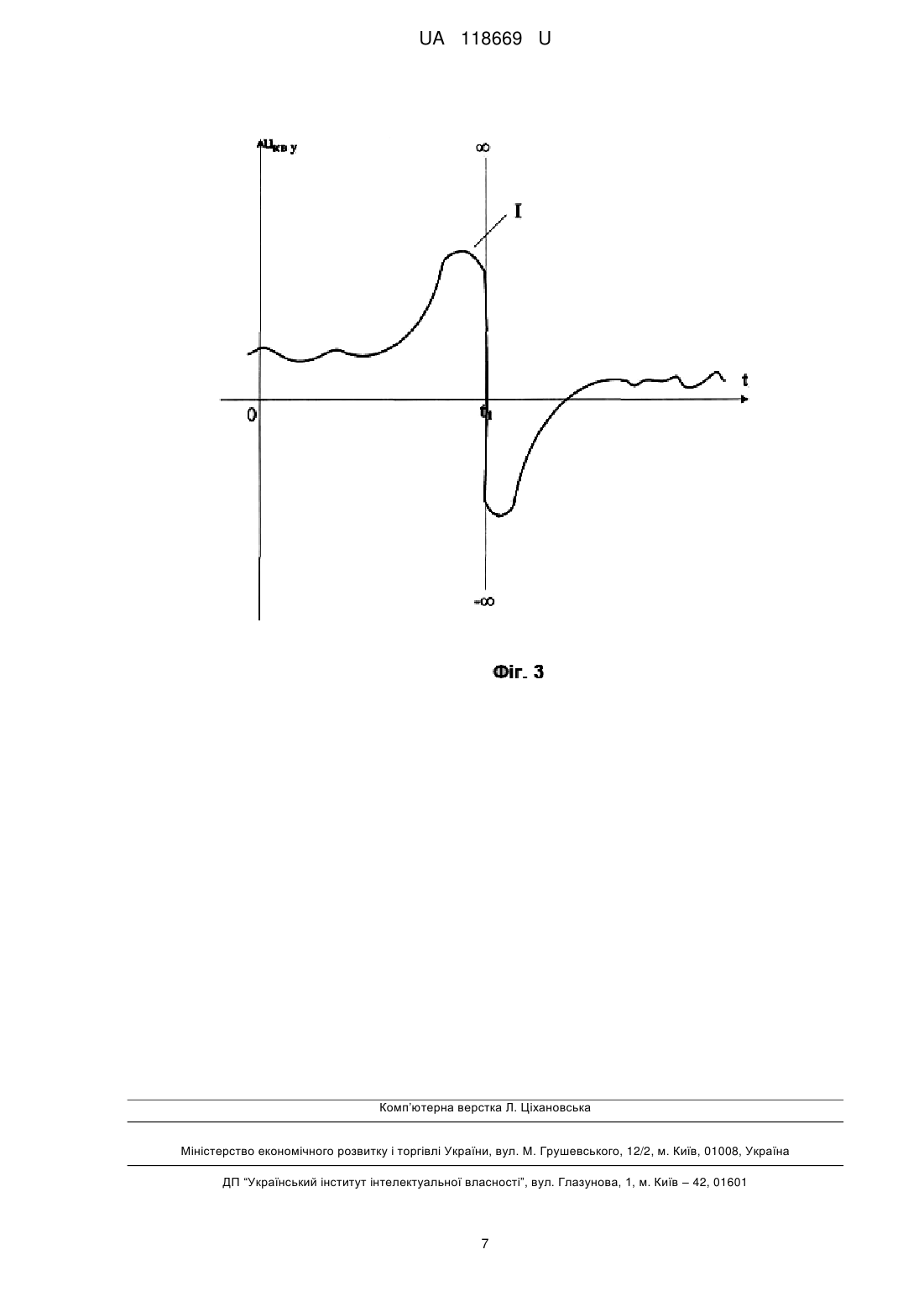
Реферат: UA 118669 U UA 118669 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до області геофізичних досліджень земних надр, шельфових, а також водних зон морів та океанів індуктивним методом за допомогою гармонічно змінних електромагнітних полів і може бути використаний при побудові засобів виявлення, пошуку та розвідки родовищ поліметалічних руд та інших тіл з діамагнітними властивостями, крупногабаритних провідних тіл з феромагнітними властивостями, наприклад, родовищ залізних руд, затонулих кораблів, підводних тіл тощо. Відомий пристрій для аероелектророзвідки, придатний для виявлення, пошуку та розвідки родовищ як поліметалічних руд, так і родовищ провідних руд та інших провідних тіл з феромагнітними властивостями індуктивним методом за допомогою гармонічного поля, що містить рухомий генератор та диполь, що розташовані на борту літака АН-2 (рухоме джерело електромагнітного поля), два ортогонально розташовані у вертикальній та горизонтальній площинах магнітоприймачі, що перетворюють відповідні проекції напруженості магнітного поля в електричний сигнал і розміщені у спеціальній гондолі, яка підвішена до літака на трос-кабелі, довжину якого можна змінювати від 30 до 120 метрів, вимірювач, під'єднаний до магнітоприймачів і розміщений на борту того ж літака АН-2, що вимірює відношення півосей еліпса поляризації магнітного поля (апаратура типу ДИП-А). [Способ геоэлектроразведки: А.с. 1364018 СССР, МКИ G01 V 3/08 /Бучма И.М. (СССР). - № 4011040/31-25; Заявлено 14.01.86 Опубл. ДСП. Гриф ДСП знятий 18.03.97. 2. Мизюк Л.Я., Поджарий В.М., Проць Р.В. Измерение инвариантов магнитного поля при электроразведке. Киев: Наукова думка, 1976. – 231 c.]. Однак такий пристрій не дозволяє збільшувати глибинність досліджень, яка визначається рознесенням між генераторним диполем, що розміщений на літаку АН-2 та підвішеною до нього на трос-кабелі гондолою, з розміщеними в ній магнітоприймачами. На сьогодні максимальне значення такого рознесення складає 120 м при потужності бортового генератора 300 Вт. Подальше збільшення глибинності вимагатиме збільшення потужності бортової мережі, що є неможливим. При цьому найменша висота гондоли від досліджуваної поверхні з огляду на безпеку літака та його екіпажу (пілот та борт оператор, що обслуговує апаратуру ДИП-А) не повинна бути меншою ніж 50 м. При меншій висоті гондоли існує ризик, при попаданні літака у повітряну яму, зачіпання гондоли за досліджувану поверхню, що може призвести до падіння літака та загибелі екіпажу. Крім цього, збільшення розносу обумовлює збільшення висоти польоту літака, на якому розташований генераторний диполь. А це у свою чергу приведе до зменшення напруженості первинного магнітного поля в місці розташування шуканого тіла, оскільки напруженість магнітного поля зменшується обернено пропорційно квадрату відстані від елемента, що генерує поле, до шуканого тіла. Тому бажано було б розмістити елемент, що генерує електромагнітне поле, якомога ближче до досліджуваної поверхні. Відомий пристрій для наземної електророзвідки, що містить суміщені та ізольовані між собою генераторну та вимірювальну провідні петлі однакових розмірів, генератор синусоїдальної напруги (струму), варіометр, вимірювальний пристрій одного з двох параметрів: відношення квадратурної компоненти модуля напруженості вторинного магнітного поля до модуля напруженості первинного магнітного поля або фазового зсуву між напруженістю первинного магнітного поля та напруженістю сумарного (первинного та вторинного) магнітного поля та реєстратор результатів вимірювання, причому первинний навій варіометра та генераторна петля з'єднані між собою послідовно, перший вивід генератора під'єднаний до вільного виводу первинного навою варіометра, а другий вивід генератора під'єднаний до вільного виводу генераторної петлі, вторинний навій варіометра під'єднаний послідовнозустрічно з вимірювальною петлею, причому вільний вивід вимірювальної петлі під'єднаний до загального виводу вимірювального пристрою, вільний вивід вторинного навою варіометра під'єднаний до першого входу вимірювального пристрою, а точка з'єднання вимірювальної петлі та вторинного навою варіометра під'єднана до другого входу вимірювального пристрою, вихід вимірювального пристрою під'єднано до входу реєстратора результатів вимірювання. [І.М. Бучма. Засоби вимірювання індуктивної електророзвідки та вихрострумової діагностики. Львів: Видавництво НУ "Львівська політехніка", 2008, стр. 244.] Однак такий пристрій непридатний для виявлення провідних тіл з феромагнітними властивостями як у земних, так і у водних глибинах, тобто має обмежені функціональні можливості. В основу корисної моделі поставлено задачу створення пристрою для індуктивної аероелектророзвідки провідних тіл гармонічними електромагнітними полями із збудником поля, розташованим безпосередньо біля досліджуваного напівпростору, що дає можливість при невеликій потужності генератора, виявляти тіла не тільки з діамагнітними, але й з феромагнітними властивостями, які залягають в надрах землі, у шельфових зонах та водних 1 UA 118669 U 5 10 15 20 25 30 35 40 45 50 55 60 глибинах озер, морів та океанів, здійснювати попередню обробку отриманих даних та забезпечувати оперативне отримання інформації про результати досліджень центром збору інформації, тобто розширити функціональні можливості пристрою. Поставлена задача вирішується тим, що в пристрій для електророзвідки, що містить суміщені та ізольовані між собою генераторну та вимірювальну провідні петлі однакових розмірів, генератор синусоїдальної напруги (струму), варіометр, вимірювальний пристрій одного з двох параметрів: відношення квадратурної компоненти модуля напруженості вторинного магнітного поля до модуля напруженості первинного магнітного поля, або фазового зсуву між напруженістю первинного магнітного поля та напруженістю сумарного (первинного та вторинного) магнітного поля та реєстратор результатів вимірювання, причому первинний навій варіометра та генераторна петля з'єднані між собою послідовно, перший вивід генератора під'єднаний до вільного виводу первинного навою варіометра, а другий вивід генератора під'єднаний до вільного виводу генераторної петлі, вторинний навій варіометра під'єднаний послідовно-зустрічно з вимірювальною петлею, причому вільний вивід вимірювальної петлі під'єднаний до загального виводу вимірювального пристрою, вільний вивід вторинного навою варіометра під'єднаний до першого входу вимірювального пристрою, а точка з'єднання вимірювальної петлі та вторинного навою варіометра під'єднана до другого входу вимірювального пристрою, вихід вимірювального пристрою під'єднано до входу реєстратора результатів вимірювання, згідно корисної моделі, додатково введені жорсткий ізоляційний каркас у вигляді квадрата чи прямокутника певних розмірів, в якому розміщені генераторна та вимірювальна петлі, множину безпілотних літальних апаратів, до яких підвішено каркас з розміщеними в ньому генераторною та вимірювальною петлями, комп'ютерні засоби керування та синхронізації роботи безпілотних літальних апаратів, наземний пульт дистанційного управління безпілотними літальними апаратами та зчитування даних з реєстратора результатів вимірювання, засоби безпроводового автоматичного зв'язку безпілотних літальних апаратів та реєстратора результатів вимірювання з наземним пультом дистанційного управління безпілотними літальними апаратами та зчитування даних з реєстратора результатів вимірювання, причому генератор, варіометр, вимірювальний пристрій, реєстратор результатів вимірювання та засоби безпроводового автоматичного зв'язку безпілотних літальних апаратів та реєстратора результатів вимірювання розташовують на безпілотних літальних апаратах, а програмне забезпечення наземного пульта дистанційного управління забезпечує синхронну роботу всіх безпілотних апаратів на всіх стадіях роботи: при зльоті, приземленні, під час горизонтального польоту та при маневруванні, зокрема, при зміні курсу та висоти польоту тощо. Це дозволяє при малих потужностях пристрою для аероелектророзвідки виявляти крім діамагнітних провідних тіл також і тіла з феромагнітними властивостями як під землею так і під водою та забезпечувати надання оперативної інформації про їх наявність у центр збору даних і, таким чином, збільшити функціональні можливості пристрою. На фіг. 1 зображено структурну схему пристрою для аероелектророзвідки, на фіг. 2 - схему для пояснення та обґрунтування появи сигналу від тіл з феромагнітними властивостями у пристрої для аероелектророзвідки в процесі польоту, а на фіг. 3 - часову діаграму поведінки квадратурної складової, зумовленої тілом з феромагнітними властивостями, на виході реєстратора 8 пристрою для аероелектророзвідки. Пристрій для аероелектророзвідки (фіг. 1) складається з суміщених та ізольованих між собою генераторної 3 та вимірювальної 6 провідних петель однакових розмірів, генератора 1 синусоїдальної напруги (струму), варіометра 2, вимірювального пристрою 7 одного з двох параметрів: відношення модуля напруженості квадратурної компоненти вторинного магнітного поля до модуля напруженості первинного магнітного поля або фазового зсуву між напруженістю первинного магнітного поля та напруженістю сумарного (первинного та вторинного) магнітного поля та реєстратор 8 результатів вимірювання, причому первинний навій варіометра 2 та генераторна петля 3 з'єднані між собою послідовно, перший вивід генератора 1 під'єднаний до вільного виводу первинного навою варіометра 2, а другий вивід генератора 1 під'єднаний до вільного виводу генераторної петлі 3, вторинний навій варіометра 2 під'єднаний послідовнозустрічно з вимірювальною петлею 6, вільний вивід вимірювальної петлі 6 під'єднаний до загального виводу вимірювального пристрою 7, вільний вивід вторинного навою варіометра 2 під'єднаний до першого входу вимірювального пристрою 7, а точка з'єднання вимірювальної петлі 6 та вторинного навою варіометра 2 під'єднана до другого входу вимірювального пристрою 7, вихід вимірювального пристрою 7 під'єднано до входу реєстратора 8 результатів вимірювання, жорсткого ізоляційного каркасу 4 у вигляді квадрата чи прямокутника певних розмірів, в якому розміщені генераторна 3 та вимірювальна 6 петлі, множини безпілотних літальних апаратів 5 з комп'ютерними засобами керування та синхронізації роботи всіх 2 UA 118669 U 5 10 15 20 25 30 безпілотних літальних апаратів та безпроводового зв'язку з наземним пультом 9 дистанційного управління, до яких підвішено каркас 4 з розміщеними в ньому генераторною 3 та вимірювальною 6 петлями, наземного пульта 9 дистанційного управління безпілотними літальними апаратами та зчитування даних з реєстратора 8 результатів вимірювання, обладнаного засобами безпроводового зв'язку з безпілотними літальними апаратами 5 та реєстратором 8 результатів вимірювання, причому генератор 1, варіометр 2, вимірювальний пристрій 7, реєстратор 8 результатів вимірювання та засоби безпроводового зв'язку безпілотних літальних апаратів 5 та реєстратора 8 результатів вимірювання розташовують на безпілотних літальних апаратах, а наземний пульт дистанційного управління обладнано відповідними програмами, що забезпечують синхронну роботу всіх безпілотних апаратів на всіх стадіях роботи: при зльоті, приземленні, під час горизонтального польоту та при маневруванні, зокрема, при зміні курсу та висоти польоту тощо. Генератор 1 живить синусоїдальним струмом послідовно з'єднані первинний навій варіометра 2 та генераторну петлю 3, розміщену у жорсткому каркасі 4, підвішеному до множини безпілотних літальних апаратів 5. Синусоїдальний струм струм генераторної петлі 3 створює у навколишньому повітряному просторі змінне електромагнітне поле, яке поширюючись проникає з повітря у досліджуваний малопровідний напівпростір (землю чи воду) і, зустрічаючи на своєму шляху провідні тіла індукує в них вихорові струми. Ці струми створюють вторинне електромагнітне поле, магнітна складова якого додається до магнітної складової первинного поля, зсуваючи його за фазою. Це сумарне магнітне поле наводить е.р.с. у вимірювальній петлі 6, яка разом з генераторною петлею 3 розміщена у жорсткому каркасі 4. Розглянемо, якою буде реакція пристрою для аероелектророзвідки на тіло з феромагнітними властивостями. Для спрощення будемо вважати, що в площині приймання (всередині вимірювальної петлі 6) модулі напруженостей первинного поля H1m sin t і вторинного поля H2m sin t синфазні (або протифазні), напрям у просторі напруженості вторинного магнітного поля в площині приймання, зокрема всередині вимірювальної петлі 6 лежить на лінії, що з'єднує центр вимірювальної петлі 6 з центром тіла з феромагнітними властивостями, а напрям напруженості первинного поля - перпендикулярний до площини генераторної петлі 3 та вимірювальної петлі 6 (фіг. 2). Тоді для вертикальної складової напруженості вторинного магнітного поля в площині приймання, враховуючи горизонтальний рух пристрою для аероелектророзвідки, можна записати h , H 2y t H 2m sin t sin t H 2m sin t sin arctg L ПОР vt де 35 40 H 2m амплітуда складової магнітного поля; t arctg h h - змінний у часі кут між горизонтальною лінією польоту та arctg l x t L ПОР vt напрямком на провідне тіло з феромагнітними властивостями; h - висота польоту генераторної 3 та вимірювальної 6 петель над досліджуваним півпростором (земля, вода); lx t LПОР vt – проекція відстані між центром вимірювальної петлі 6 та провідним тілом на горизонтальну лінію, що співпадає з напрямком руху пристрою для аероелектророзвідки; v - швидкість руху каркасу 4, переміщуваного множиною безпілотних апаратів 5 у горизонтальній площині. На основі (1) запишемо вираз для е.р.с. у вимірювальній петлі, наведену вторинним магнітним полем e2y d2y t WS dH2y t dt dt h d WSH 2m cos t sin( arctg ) sin t L ПОР vt dt 45 вторинного (1) h sin( arctg L ПОР vt (2) Перший член в останньому виразі являє собою квадратурну складову, яка виникає у вимірювальній петлі 6 з синфазної складової при диференціюванні магнітного потоку вимірювальною петлею. її буде вимірювати вимірювальний пристрій 7, а її відліки будуть реєструватися реєстратором 8. Поява квадратурної складової в сигналі вторинного магнітного поля зумовить фазовий зсув між сигналами первинного та сумарного полів, тому 3 UA 118669 U 5 10 вимірювальний пристрій 7 може вимірювати також і фазовий зсув, відліки якого будуть реєструватися реєстратором 8. При необхідності, відліки безпосередньо чи після попередньої обробки можуть передаватися з допомогою безпроводового зв'язку разом з іншою інформацією, зокрема, про координати місць появи вимірювального сигналу, на наземний пульт управління 9, який керує роботою безпілотних літальних апаратів 5, для опрацювання, аналізу та прийняття рішення. Проаналізуємо поведінку квадратурної складової сигналу при наближенні пристрою для аероелектророзвідки до феромагнітного тіла, при про літанні над ним та при віддаленні від нього. На підставі виразу (2) випишемо залежність, що описує поведінку тільки квадратурної складової e КВу WSH 2m cos t sin( arctg h ) L ПОР vt (3) WSH 2m cos t sin( arctg 15 h L ПОР vt ) Користуючись виразом (3) (фіг. 3) розглянемо окремо чотири випадки: а) при наближенні пристрою для аероелектророзвідки до тіла, тобто при vt LПОР і h LПОР , Тоді вираз для квадратурної складової матиме вигляд h cos t , (4) e КВу WSH 2m L ПОР vt 20 З виразу (4) видно, що в міру наближення пристрою для аероелектророзвідки до феромагнітного тіла значення квадратурної складової зростатиме за рахунок зменшення знаменника дробової частини виразу; б) в момент підлітання до тіла, коли для моменту часу t1 справедливий вираз, що LПОР vt1 0 , то згідно з (4) квадратурна складова прямує до свого максимуму, оскільки 25 30 35 h h , a sin( arctg ) 1; L ПОР vt LПОР vt1 в) в момент відлітання від тіла, коли для моменту часу t1 справедливий вираз, що LПОР vt1 0 , квадратурна складова різко змінює знак, приймаючи свій від'ємний максимум, тому що h sin( arctg ) 1 ; L ПОР vt г) при відлітанні від тіла, тобто при зростанні модуля L ПОР vt згідно з виразом eКВу WSH 2my sin( arctg h ) cos t L ПОР vt від'ємне значення квадратурної складової зменшується аж до рівня, меншого від порогового. Сказане відображено на фіг. 3. Таким чином, фіксуючи координати пристрою для аероелектророзвідки в момент переходу сигналу у вигляді одного періоду синусоїди через нуль, можна визначити місцеположення тіла з феромагнітними властивостями, яке знаходиться під землею чи під водою. Для уточнення координат місцеположення тіла може знадобитися ще один політ через визначену точку, але за маршрутом, перпендикулярним до першого. Якщо ж тіло переміщається, то очевидно, що для відслідковування за його переміщеннями прийдеться зробити не один політ. 40 4 UA 118669 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 15 20 25 30 Пристрій для аероелектророзвідки, що містить суміщені та ізольовані між собою генераторну та вимірювальну провідні петлі однакових розмірів, генератор синусоїдальної напруги або струму, варіометр, вимірювальний пристрій одного з двох параметрів: відношення квадратурної компоненти модуля напруженості вторинного магнітного поля до модуля напруженості первинного магнітного поля або фазового зсуву між напруженістю первинного магнітного поля та напруженістю сумарного (первинного та вторинного) магнітного поля та реєстратор результатів вимірювання, причому первинний навій варіометра та генераторна петля з'єднані між собою послідовно, перший вивід генератора під'єднаний до вільного виводу первинного навою варіометра, а другий вивід генератора під'єднаний до вільного виводу генераторної петлі, вторинний навій варіометра під'єднаний послідовно-зустрічно з вимірювальною петлею, причому вільний вивід вимірювальної петлі під'єднаний до загального виводу вимірювального пристрою, вільний вивід вторинного навою варіометра під'єднаний до першого входу вимірювального пристрою, а точка з'єднання вимірювальної петлі та вторинного навою варіометра під'єднана до другого входу вимірювального пристрою, вихід вимірювального пристрою під'єднано до входу реєстратора результатів вимірювання, який відрізняється тим, що додатково містить жорсткий ізоляційний каркас у вигляді квадрата чи прямокутника, в якому розміщені генераторна та вимірювальна петлі, множину безпілотних літальних апаратів, до яких підвішено каркас з розміщеними в ньому генераторною та вимірювальною петлями, комп'ютерні засоби керування та синхронізації роботи безпілотних літальних апаратів, пульт дистанційного управління безпілотними літальними апаратами та зчитування даних з реєстратора результатів вимірювання, засоби безпроводового автоматичного зв'язку безпілотних літальних апаратів та реєстратора результатів вимірювання з пультом дистанційного управління безпілотними літальними апаратами та зчитування даних з реєстратора результатів вимірювання, причому генератор, варіометр, вимірювальний пристрій, реєстратор результатів вимірювання та засоби безпроводового автоматичного зв'язку безпілотних літальних апаратів та реєстратора результатів вимірювання розташовують на безпілотних літальних апаратах, причому програмне забезпечення пульта дистанційного управління забезпечує виконане так, що забезпечує синхронну роботу всіх безпілотних апаратів на всіх стадіях роботи: при зльоті, приземленні, під час горизонтального польоту та при маневруванні, зокрема при зміні курсу та висоти польоту тощо. 5 UA 118669 U 6 UA 118669 U Комп’ютерна верстка Л. Ціхановська Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01V 3/16
Мітки: пристрій, аероелектророзвідки
Код посилання
<a href="https://ua.patents.su/9-118669-pristrijj-dlya-aeroelektrorozvidki.html" target="_blank" rel="follow" title="База патентів України">Пристрій для аероелектророзвідки</a>
Пристрій для визначення механічних напружень у феромагнітних конструкціях
Номер патенту: 64591
Опубліковано: 10.11.2011
Автор: Смірний Михайло Федорович
МПК: G01G 7/00
Мітки: механічних, феромагнітних, пристрій, визначення, конструкціях, напружень
Формула / Реферат:
Пристрій для визначення механічних напружень у феромагнітних конструкціях, що містить магнітопружний датчик з незамкнутим магнітопроводом, обмотку збудження на магнітопроводі, джерело живлення постійного струму, потокочутливий перетворювач магнітного поля, згладжуючий фільтр, реле часу з контактною групою та двома регулювальними ланцюгами, блок вимірювання і сигналізації, з'єднаний з парою контактів контактної групи реле часу, додаткові...
Пристрій для визначення механічних напруг у феромагнітних конструкціях
Номер патенту: 83512
Опубліковано: 10.09.2013
Автор: Смірний Михайло Федорович
МПК: G01B 7/24
Мітки: феромагнітних, конструкціях, пристрій, визначення, напруг, механічних
Формула / Реферат:
Пристрій для визначення механічних напруг у феромагнітних конструкціях, що містить магнітопружний датчик з незамкнутим П-подібним магнітопроводом, обмотку збудження на магнітопроводі, джерело живлення постійного струму, згладжуючий фільтр, з'єднаний виходом з обмоткою збудження, реле часу з контактною групою та двома регулювальними ланцюгами, блок вимірювання та сигналізації, з'єднаний з парою контактів контактної групи реле часу,...
Пристрій для визначення механічних напружень у феромагнітних конструкціях
Номер патенту: 57068
Опубліковано: 10.02.2011
Автори: Смірний Михайло Федорович, Малахов Олег Володимирович, Голубенко Олександр Леонідович
МПК: G01B 7/16
Мітки: конструкціях, напружень, феромагнітних, пристрій, визначення, механічних
Формула / Реферат:
Пристрій для визначення механічних напружень у феромагнітних конструкціях, що містить магнітопружний датчик з незамкнутим магнітопроводом, обмотку збудження на магнітопроводі, джерело живлення постійного струму, потокочутливий перетворювач магнітного поля, згладжуючий фільтр, реле часу з контактною групою та двома регулювальними ланцюгами, блок вимірювання і сигналізації, з'єднаний з парою контактів контактної групи реле часу, який...
Пристрій для визначення механічних напружень у феромагнітних конструкціях
Номер патенту: 61657
Опубліковано: 25.07.2011
Автор: Смірний Михайло Федорович
МПК: G01G 7/00
Мітки: пристрій, феромагнітних, конструкціях, напружень, механічних, визначення
Формула / Реферат:
Пристрій для визначення механічних напружень у феромагнітних конструкціях, що містить магнітну головку, обмотку збудження, джерело живлення постійного струму, потокочутливий перетворювач магнітного поля, згладжуючий фільтр, реле часу з контактною групою та двома регулювальними ланцюгами, блок вимірювання і сигналізації, з'єднаний з парою контактів контактної групи реле часу, який відрізняється тим, що магнітна головка запису виконана у...
Електромагнітний пристрій вимірювання витрати технологічних рідин
Номер патенту: 116629
Опубліковано: 25.05.2017
Автори: Квітка Сергій Олексійович, Нестерчук Діна Миколаївна
МПК: G01F 1/58
Мітки: електромагнітний, вимірювання, рідин, витрати, пристрій, технологічних
Формула / Реферат:
Електромагнітний пристрій вимірювання витрати технологічних рідин, що містить датчик витрати рідини, до складу якого входить електромагнітний первинний вимірювальний перетворювач витрати рідини, перетворювач "струм-частота", блок гальванічної розв'язки, а також мікропроцесорний вторинний блок реєстрації витрати рідини, до складу якого входить мікроконтролер, блок цифрової індикації, блок обміну даних з комп'ютером та блок живлення,...
Попередній патент: Спосіб вимірювання статичної витривалості м’язів людини
Наступний патент: Пристрій для фіксації та переміщення викотного візка у шафі розподільного пристрою
Випадковий патент: Теплообмінник