Спосіб визначення затримок транспортних засобів на регульованому перехресті

Формула / Реферат
Спосіб визначення затримок транспортних засобів на регульованому перехресті, оснований на скануванні гостроспрямованим лазерним променем зони перехрестя з точки над його геометричним центром конусним двопроменевим видом розгортки, причому оптична вісь одного з положень розгортки вибирається так, щоб лазерний промінь описував коло на проїжджій частині перехрестя в області стоп-ліній всіх його підходів, а другий промінь розгортки формується в одній площині з першим, але зі зміщенням на півперіоду по колу розгортки, а оптичну вісь першого променя, що формує вихідну межу контрольованої зони в області стоп-ліній, змінюють по черзі через кожен період сканування так, щоб радіус другого концентричного кола на поверхні проїжджої частини зменшувався на певну задану величину, що дозволяє визначити тип і напрямки руху транспортних засобів по кожній смузі руху і їх затримки в контрольованій зоні з урахуванням часу її проїзду кожним конкретним типом транспортного засобу, після чого визначають реальний час проїзду кожним транспортним засобом зони самого перехрестя за моментами перетину їх задніми бамперами спочатку кола сканування в області стоп-ліній на вході перехрестя, а потім цього ж кола на його виході і далі визначають транспортну затримку проїзду зони перехрестя як різницю між реальним часом проїзду цієї зони і середнім часом проїзду зони перехрестя кожним типом транспорту у заданому напрямку, при цьому загальна затримка транспортних засобів по кожній смузі руху за вибраний час виміру визначається як сума затримок транспортних засобів в контрольованій зоні та затримок цих транспортних засобів в зоні самого перехрестя, а середня затримка транспортного засобу на перехресті визначається як середньозважена середніх затримок по кожній смузі перехрестя, який відрізняється тим, що сканування зони перехрестя другим лазерним променем здійснюють, починаючи з внутрішнього кола з заданим радіусом, і поступово покроково розширяють коло сканування з заданою величиною кроку зміною положень кутів розгортки в реперній точці на кожному періоді до моменту, коли надійно визначаються зони початку уповільнення будь-якого ТЗ по смугах руху на підходах до перехрестя, або зони кінця прискорення на виходах з перехрестя, а значення прискорення і уповільнення визначаються по зміні швидкості транспортних засобів на будь-яких двох сусідніх смугах сканування другого променя і потім відбувається повернення другого променя з послідовним зменшенням радіусів сканування в зворотному напрямку на кожному періоді до внутрішнього початкового кола сканування та багаторазове повторення цього процесу для визначення кількості транспортних засобів у черзі по кожній смузі руху на момент зміни сигналу на зелений, їх прискорення і уповільнення, габарити і тип, точки і моменти початку уповільнення на підходах до перехрестя та закінчення розгону на виході з перехрестя, значення реального часу проїзду зони виміру, що визначаються за моментами початку уповільнення і закінчення прискорення, відповідні інтервали часу проїзду дистанції виміру у вільних умовах, затримки транспортних засобів як різницю між реальним часом проїзду зонивиміру та часом проїзду цієї зони у вільних умовах руху, і далі визначення середньої затримки по кожній смузі і перехресті в цілому за будь-який час виміру
Текст
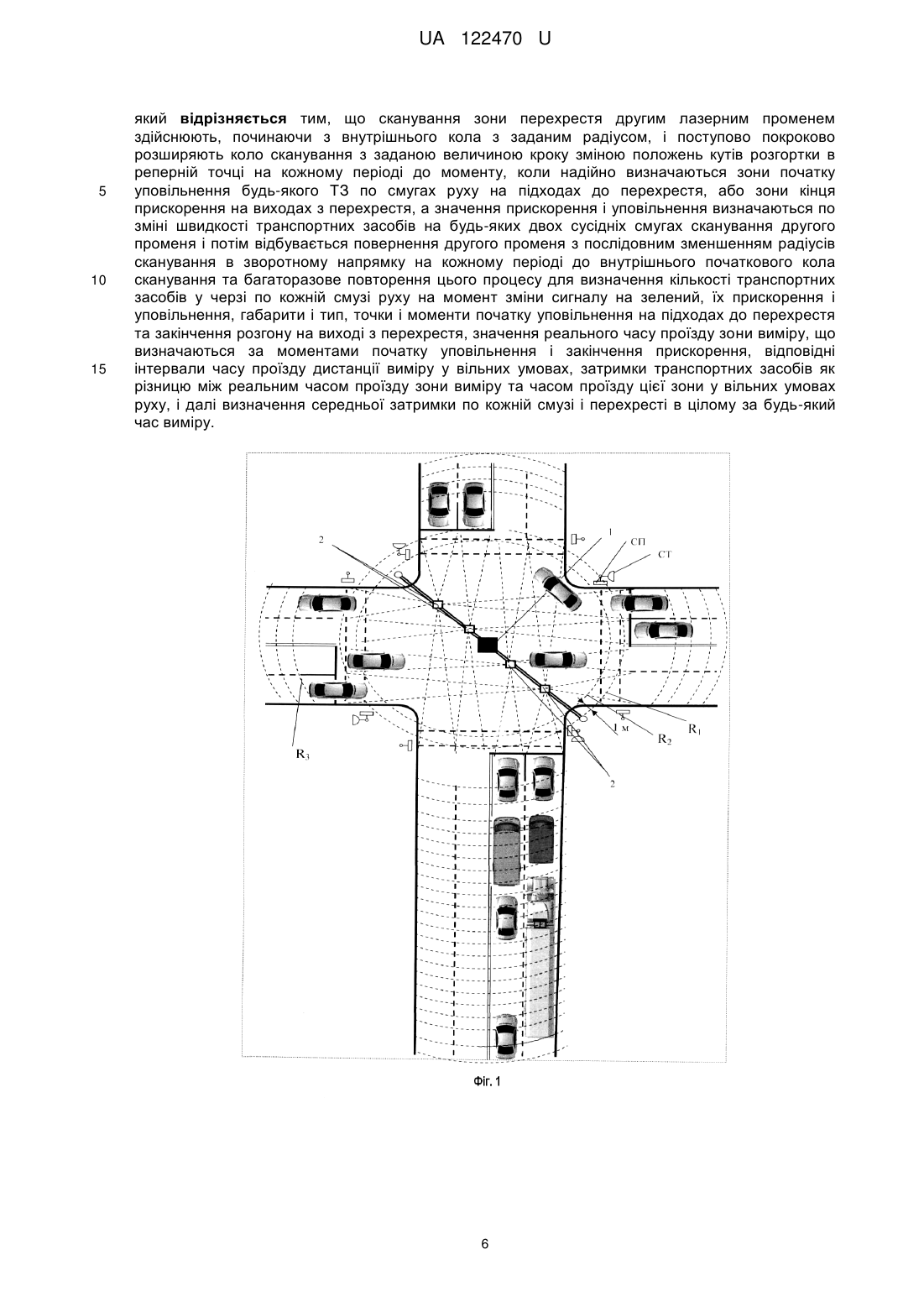
Реферат: Спосіб визначення затримок транспортних засобів на регульованому перехресті оснований на скануванні гостроспрямованим лазерним променем зони перехрестя з точки над його геометричним центром конусним двопроменевим видом розгортки, причому оптична вісь одного з положень розгортки вибирається так, щоб лазерний промінь описував коло на проїжджій частині перехрестя в області стоп-ліній всіх його підходів, а другий промінь розгортки формується в одній площині з першим, але зі зміщенням на півперіоду по колу розгортки, а оптичну вісь першого променя, що формує вихідну межу контрольованої зони в області стопліній, змінюють по черзі через кожен період сканування так, щоб радіус другого концентричного кола на поверхні проїзної частини зменшувався на певну задану величину. UA 122470 U (12) UA 122470 U UA 122470 U 5 10 15 20 25 30 35 40 45 Корисна модель належить до систем регулювання дорожнього руху (ДР) і може бути використана при розробці агрегатної системи засобів управління ДР, АСУ-ДР, в системах інформаційного забезпечення завантаження перехресть ВДМ, а також для підвищення ефективності управління рухом транспорту на регульованих перехрестях. Цей спосіб може бути використаний для одночасного визначення основних параметрів транспортних потоків (ТП): моменту проїзду транспортним засобом (ТЗ) контрольованої зони (КЗ) та перехрестя в цілому, швидкості, прискорення (уповільнення), типу і напрямків руху ТЗ, їх інтенсивності руху по кожній смузі за будь-який проміжок часу, а також інтервалів рухів між ТЗ по кожній смузі регульованого перехрестя. Відомий спосіб визначення транспортних затримок на регульованому перехресті, згідно з яким здійснюється конусне покрокове сканування одночасно двома вузькоспрямованими лазерними променями інфрачервоного діапазону тимчасово всіх підходів і виходів перехрестя, що дає можливість сформувати вхідні і вихідні межі КЗ та забезпечити визначення комплексу вищевказаних параметрів ТП по кожній смузі руху в залежності від результатів сканування. Розгортка лазерного променя здійснюється скануючим блоком, який розташовується над перехрестям на спеціальному кронштейні в точці, що відповідає геометричному центру перехрестя. У скануючому блоці, залежно від висоти його розміщення, одну з оптичних осей розгортки підбирають так, щоб перший лазерний промінь описував конусну поверхню з колом на проїжджій частині перехрестя (R1) в області "стоп-ліній" всіх його підходів. До складу скануючого блока входить оптичний відхиляючий пристрій (дискретний сканістор), який забезпечує відхилення осі першого лазерного променя в необхідне друге положення, при якому радіус кола (R2) на поверхні проїзної частини зменшується на задану величину (наприклад, на 1 м). Таким чином, блок сканування на кожному наступному періоді сканування змінює розгортку першого лазерного променя з одної оптичної осі на іншу та описує в зоні стоп-ліній на поверхні перехрестя два концентричні кола з різницею радіусів (R1-R2=1м) та формує вихідну межу КЗ. Другий оптичний промінь лазерної розгортки формується у одній площині з першим, але зі зміщенням на 180° по колу розгортки і формує вхідну межу КЗ. Оптичні фотоприймачі в процесі розгортки лазерного променя по одному з кіл на вході і виході КЗ послідовно сприймають сигнали, відбиті від ТЗ, що рухаються по різних смугах як на підходах, так і на виходах перехрестя. Фіксацію ТЗ, що в'їжджають в КЗ і виїжджають з неї, здійснюють по їх задніх бамперах, при цьому реальне число ТЗ в КЗ і сумарну транспортну затримку накопичують з високою частотою на кожному періоді сканування розгортуючого пристрою, при цьому середню транспортну затримку ТЗ по смузі і по перехрестю, в цілому, визначають по числу ТЗ, що реально виїхали з КЗ, за період вимірювань. Фіксація ТЗ, що в'їжджають в КЗ регульованого перехрестя, здійснюється із затримкою, рівною середньому часу проїзду відповідного типу ТЗ, що стало можливим завдяки періодичному скануванню зі зміною оптичної осі лазерного променя в зоні стоп-лінії перехрестя. При цьому почергова з високою швидкістю зміни радіусів сканування (з R1 на R2 і навпаки) дозволяє точно визначити час переміщень ТЗ на дистанції (R1-R2) та швидкості їх руху в зоні "стоп-ліній", а потім послідовно довжину і тип ТЗ, напрямки і інтервали їх руху, а також довжину черги ТЗ у КЗ по кожній смузі за будь-яке фіксоване значення часу. Сумарна транспортна затримка Tj перебування ТЗ у КЗ по кожній j-й смузі руху накопичується з кожним періодом Δt сканування і за час виміру Тввизначається як j t r nст i 1 b t , (1) 1 де k - число періодів сканування за час виміру рівне k / t ; nст - довжина поточної черги ТЗ по j-й смузі руху; 50 - період визначення транспортної затримки (час виміру); t - середній час проїзду КЗ кожним конкретним - м типом ТЗ, що за 55 час виміру повністю покинув КЗ. Транспортна затримка ТПj проїзду кожним типом ТЗ зони самого перехрестя з j-ї смуги руху (від кола сканування з R1 на вході перехрестя до кола з R1 на його виході), як різницю між реальним часом проїзду tp та середнім часом проїзду t зони перехрестя -м типом ТЗ у заданому напрямку 1 UA 122470 U j t p t (2) b 1 Якщо різниця t p t 0 її враховують в загальній складовій ТПj, в іншому випадку при t p t 0 ця складова не враховується. 5 10 15 20 25 30 35 40 45 50 55 Реальний час проїзду зони перехрестя кожним ТЗ фіксується за моментами перетинання їх задніми бамперами вказаних меж зони перехрестя, причому визначається він з високою точністю з дискретністю періоду сканування одночасно по всіх смугах на підходах до перехрестя. Загальна затримка транспортних засобів по кожній смузі руху за вибраний час виміру визначається як сума затримок транспортних засобів в контрольованій зоні та затримок цих транспортних засобів в зоні самого перехрестя, причому реальний час проїзду зони перехрестя визначається з високою точністю по періодах сканування одночасно по всіх смугах на підходах до перехрестя, що дає можливість подальшого визначення середньої затримки по всіх смугах і на перехресті в цілому за будь-який час виміру (Опис до патенту на винахід № 109680 від 25.09.2015 р., бюл. № 18/2015). Цей спосіб є найбільш близьким до способу, що заявляється, і тому вибраний як найближчий аналог. Недоліком цього способу є низька точність визначення транспортних затримок на регульованому перехресті, оскільки він не враховує затримки ТЗ, пов'язані з режимом уповільнення на вході до перехрестя та прискорення його виході в тій зоні, де це відбувається для кожного конкретного ТЗ. Низька точність визначення транспортної затримки обумовлена також тим, що затримки проїзду ТЗ враховуються у обмеженій контрольованій зони перед перехрестям та в зоні самого перехрестя і не враховує зону виходу з перехрестя до повного набору швидкості кожним ТЗ. В основу запропонованого способу поставлена задача підвищення точності визначення транспортних затримок на регульованому перехресті. Поставлена задача вирішується тим, що у запропонованому способі використовується конусне покрокове сканування одночасно двома вузькоспрямованими лазерними променями інфрачервоного діапазону тимчасово всіх підходів і виходів перехрестя, що дає можливість сформувати вхідні і вихідні межі КЗ та забезпечити визначення комплексу вищевказаних параметрів ТП по кожній смузі руху в залежності від результатів сканування. На фіг. 1 представлена схема, яка розкриває основні відмінні особливості запропонованого способу і послідовність його дій. Відповідно до запропонованого способу розгортка лазерного променя здійснюється скануючим блоком 1, який розташовується над перехрестям на спеціальному кронштейні в точці, що відповідає геометричному центру перехрестя. У скануючому блоці, залежно від висоти його розміщення, одну з оптичних осей розгортку підбирають так, щоб перший лазерний промінь описував конусну поверхню з колом на проїжджій частині перехрестя (R1) в області "стоп-ліній" всіх його підходів. До складу скануючого блока входить оптичний відхиляючий пристрій (дискретний сканістор), який забезпечує відхилення осі першого лазерного променя в необхідне друге положення, при якому радіус кола (R2) на поверхні проїжджої частини зменшується на задану величину (наприклад, на їм). Таким чином, блок сканування на кожному наступному періоді сканування змінює розгортку першого лазерного променя з одної оптичної осі на іншу та описує в зоні стоп-лiній на поверхні перехрестя два концентричні кола з різницею радіусів (R1-R2=1 м) та формує вихідну межу КЗ. Другий оптичний промінь лазерної розгортки формується у одній площині з першим, але зі зміщенням на 180° по колу розгортки (див. фіг. 2) і формує вхідну межу КЗ. Одночасно з першим другий лазерний промінь здійснює свою розгортку, починаючи з внутрішнього кола з радіусом R3 і поступово покроково розширяє його зміною положень кутів розгортки в реперній точці на кожному періоді сканування, утворюючи на поверхні прилеглих до перехрестя доріг концентричні кола з заданою величиною кроку (наприклад, 1 м). Це досягається програмною зміною кута оптичних осей розгортки для послідовного розширення радіуса кіл сканування з метою визначення зони початку уповільнення будь-яким ТЗ по смугах руху на підходах до перехрестя, або зони кінця прискорення на виходах з перехрестя. Оптичні фотоприймачі 2 (ФПi) в процесі розгортки лазерного променя по одному з кіл на вході і виході КЗ послідовно сприймають сигнали, відбиті від ТЗ, що рухаються по різних смугах руху як на підходах, так і на виходах перехрестя. 2 UA 122470 U 5 10 15 20 Внутрішнє коло розгортки другого променя з радіусом Яз бажано вибирати на відстані 5…10 м від стоп-лінії (див. фіг. 1), наступні концентричні кола розгортки будуть досягати зони, де на швидкість руху ТЗ починає впливати перехрестя. Як тільки радіус зовнішнього кола другого променя розгортки досягає зони впливу перехрестя на швидкість ТЗ, по відбитих сигналах проводиться пошук місця розташування і моменту часу початку уповільнення для ТЗ по окремих смугах на підходах до перехрестя та місця і моменту часу закінчення прискорення ТЗ, що по різних смугах виїжджають з перехрестя. Розгортка другого променя продовжується до кінця найбільш дальнього ТЗ в указаній зоні, а потім здійснюється додаткове сканування з розширенням зони ще на 5-10 м, для надійного визначення моменту початку зниження (кінця підвищення) швидкості ТЗ. Після цього в реперній точці відбувається зміна кута осі сканування другого променя на передостаннє коло з послідовним зменшенням радіусів сканування в зворотному напрямку на кожному періоді на 1 м до кола з радіусом R3. Далі цей процес багаторазово повторюється, що дозволяє при високій швидкості розгортки достатньо точно визначити процес зміни швидкості ТЗ та довжину черг, що накопичуються по смугам руху на червоний сигнал світлофору у будьяку мить часу. Швидкість ТЗ, що послідовно своїм переднім або заднім бампером перегинає лінії сканування другого оптичного променя, визначають на дистанції 1 м і фіксують як значення V1' та V2' на двох сусідніх смугах сканування. Якщо час перетину другої з двох сусідніх смугах сканування складає t', то значення прискорення (уповільнення) на цих смугах сканування визначається як a V2 ' V1' . (3) t' Потім фіксуються швидкості V1" та V2" цього ж ТЗ та часу t" при перетині відповідно цих ліній сканування його заднім бампером. 25 Довжина З цього ТЗ з урахуванням уповільнення (прискорення) a' V2 ' ' V1' ' , (4) t З де t З - час проїзду ТЗ відповідної лінії сканування (на виході другої з двох сусідніх смугах сканування), спочатку переднім, а потім заднім бампером, визначається як З a' t 2З . (5) 40 За значенням З у подальшому визначається тип ТЗ, який по кожній смузі руху перетинає зону сканування другого променя. Можливість виміру швидкості на кожній дистанції їм та прискорення (уповільнення) ТЗ на будь-яких двох послідовних смугах сканування в зоні розгортки другого променя, дає можливість суттєво підвищити точність визначення габариту і типу ТЗ, а також точки і моменту початку його уповільнення (завершення прискорення). Згідно з запропонованим способом затримка кожного ТЗ (з урахуванням його типу і, смуги руху j та напрямку руху) визначається як різниця між реальним часом проїзду ТЗ дистанції виміру та часом проїзду цієї дистанції у вільних умовах руху (без затримок, тобто без впливу інших ТЗ і світлофорної сигналізації на швидкість руху). ji ji ji t 3 t p t ву . (6) 45 Момент і місце, з якого починається підрахунок реального часу проїзду пропонується вибирати за моментом початку уповільнення ТЗ в зоні сканування другого променя на підходах до перехрестя, а кінець цього інтервалу - за моментом закінчення прискорення ТЗ в зоні сканування другого променя на виході з перехрестя. Час проїзду ТЗ i-го типу у вільних умовах визначається дистанцією виміру ji між точками 30 35 початку і кінця відповідного реального часу проїзду ТЗ і швидкістю руху Vji у вільних умовах для конкретного типу ТЗ у конкретному напрямку руху: ji t ву ji Vji . (7) Загальна затримка ТЗ по j - й смузі руху за обраний час визначається як сума 50 j b ji n i t 3 , (8) i 1 де ni - кількість ТЗ і-го типу, що в'їхали та повністю покинули дистанцію виміру за час ; 3 UA 122470 U А середня затримка t j для j - тої смуги руху за час виміру , або, наприклад, за кожний цикл світлофорного регулювання TЦ визначається tj 5 j . (9) n npj Потім за результатами виміру середніх затримок ТЗ по кожній смузі руху на усіх підходах до перехрестя визначають середню транспортну затримку t n для всього перехрестя: m t j nnpj t n j 1 m , (10) nnpj j 1 де nnpj - число ТЗ, що за час виміру повністю перетнули точки початку і кінця виміру ji реального часу t p проїзду ТЗ по j-їй смузі; m - число смуг руху на підходах до перехрестя. Фіксацію ТЗ, що перетнули точки початку і ji 10 15 20 25 30 35 40 45 50 кінця виміру реального часу t p здійснюють по їх передніх бамперах, при цьому поступове покрокове сканування другим променем достатньо широкої іони з кроком 1 м дозволяє точно визначити тип ТЗ, їх кількість і послідовність у черзі перед стоп-лінією по кожній смузі на червоний сигнал світлофора. Подвійне сканування першим променем в зоні стоп-ліній дає змогу визначити тип, точний час та кількість ТЗ, які покинули КЗ по кожній зі смуг руху на зелений сигнал світлофора, а значить, визначити наявність ТЗ по окремих смугах в КЗ на момент зміни зеленого сигналу світлофора на жовтий. За результатами сканування першим променем також визначають напрямки і інтервали руху ТЗ на виході з перехрестя, кількість та тип ТЗ по кожній смузі, що не встигли (не змогли) покинути зону самого перехрестя на зелений сигнал світлофора, тобто не здійснили перетинання зони сканування (R1, R2) по смугах руху на виході з перехрестя. Можливість розширення зони визначення затримок руху з урахуванням зони виходу з перехрестя, де відбувається повний набір швидкості кожним ТЗ, дає змогу суттєво підвищити точність їх виміру. Підвищення точності виміру затримок ТЗ також відбувається за рахунок можливості виміру параметрів руху ТЗ на кожному метрі розгортки другого променя, а індивідуальний підхід до ji визначення точок початку і кінця t p кожного ТЗ враховує індивідуальні психофізіологічні особливості кожного водія. Крім того, спосіб дає змогу врахувати затримки і тих ТЗ, які без зупинки проїхали перехрестя на зелений сигнал світлофора, але були змушені з будь-яких причин знизити швидкість руху. Таким чином, оперативне визначення реальних параметрів руху (швидкості, прискорення, типу та габаритів) окремих видів ТЗ, довжини черги, реальних значень моментів зміни режимів руху по усіх смугах на підходах, виходах та в зоні перехрестя шляхом високошвидкісного сканування дає можливість одержати (в реальному масштабі часу) більш точні значення затримок ТЗ для різноманітних умов руху. На фіг. 2 представлена структурна схема пристрою, що розкриває основні відмінні риси запропонованого способу. Скануючий блок 1 має у своєму складі лазерний випромінювач 3 вузькоспрямованого інфрачервоного променя і вузол розгортки 4, які формують двопроменеве конусне покрокове сканування зони перехрестя за допомогою двох дискретних сканісторів 5 1 і 52, що забезпечують відхилення осей обох лазерних променів в інші необхідні положення по заданих програмах. Обидва оптичні промені 81 та 82 формуються вузлом розгортки у одній площині зі зміщенням на півперіоду (180°), що дає змогу розпізнавати у реперній точці кожний з них і чітко виконувати окрему програму їх відхилення у задані положення. Для першого лазерного променя 81 забезпечується конусне покрокове сканування з круговою траєкторію руху променя (з радіусом R1) в зоні "стоп-ліній" перехрестя та меншим на 1 м радіусом R2 зі зміною траєкторій руху променя у реперній точці дискретним сканістором 51 по черзі на кожному періоді сканування. Другий дискретний сканістор 52 забезпечує відхилення осі другого лазерного променя в інші необхідні положення, при яких радіус кола на поверхні проїжджої частини змінюється від R3 з наростанням на кожному кроці на 1 м. Внутрішнє коло розгортки другого променя з радіусом R3 бажано вибирати на відстані 5-10 м від стоп-лінії, а наступні концентричні кола розгортки будуть 4 UA 122470 U 5 10 15 20 25 30 35 досягати зони, де на швидкість руху ТЗ починає впливати перехрестя. Як тільки радіус зовнішнього кола другого променя розгортки досягає зони впливу перехрестя на швидкість ТЗ, по відбитих сигналах проводиться пошук місця розташування і моменту часу початку уповільнення для ТЗ по окремих смугах на підходах до перехрестя та місця і моменту часу закінчення прискорення ТЗ, що по різних смугах виїжджають з перехрестя. Розгортка другого променя продовжується до кінця найбільш дальнього ТЗ в указаній зоні, а потім здійснюється додаткове сканування з розширенням зони ще на 5-10 м, для надійного визначення моменту початку зниження (кінця підвищення) швидкості ТЗ. Все це контролюється програмою обчислювального пристрою 7, який видає сигнал на дискретний сканістор 5 2, і той у найближчій реперній точці по сигналу з перетворювача 60 здійснює зміну кута осі сканування другого променя з кінцевого кола на передостаннє з послідовним зменшенням радіусів сканування в зворотному напрямку на кожному періоді на 1 м до кола з радіусом R3. Далі цей процес багаторазово повторюється, що дозволяє при високій швидкості розгортки достатньо точно визначити процес зміни швидкості ТЗ та довжину черг, що накопичуються по смугах руху на червоний сигнал світлофора у будь-яку мить часу. Відбитий від ТЗ оптичний сигнал (при наявності ТЗ в зоні, що контролюється, даної i-ої смуги) вловлюється відповідними фотоприймачами 2 (ФЦ) кожної смуги руху як на входах, так і на виходах перехрестя. Перетворювач 6 сигналу кожного ФП, 2, відповідної смуги руху, перетворює сигнали в імпульсно-цифрові коди, які вводяться в обчислювальний пристрій 7, де далі визначаються всі необхідні параметри за будь-який час виміру або за час циклу світлофорного регулювання, інформація про який може надходити в обчислювальний пристрій 7 з світлофорного об'єкта 9. Якщо в обчислювальний пристрій 7 закладається алгоритм, правила і константи, відповідні діапазонам тимчасових інтервалів руху ТЗ у зоні перехрестя, при будь-яких змінах напрямків їх руху по смугах, зберігається інформація про швидкості вільного руху різних типів ТЗ, значення координат точок початку та закінчення реального часу проїзду перехрестя та часу проїду дистанції виміру у вільних умовах, склад ТЗ та поточні значення черг по смугах руху, тоді з'являється можливість визначення не тільки усіх перелічених вище параметрів, але й можливість більш точного визначення транспортних затримок. Перевагою запропонованого способу також є і те, що він дозволяє одночасно з затримками визначати ряд окремих параметрів руху ТП в зоні перехрестя: швидкості руху, прискорення і уповільнення ТЗ, їх довжину, інтервали руху, інтенсивності ТП по кожній смузі за будь-яке фіксоване значення часу, причому здійснюється це одним загальним пристроєм, розташованим в зоні перехрестя, що контролюється. Таким чином, запропонований спосіб дає можливість одержати найбільш повний комплекс інформації для контролю і подальшого оперативного (в реальному масштабі часу) управління рухом на перехресті. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 40 45 50 55 60 Спосіб визначення затримок транспортних засобів на регульованому перехресті, оснований на скануванні гостроспрямованим лазерним променем зони перехрестя з точки над його геометричним центром конусним двопроменевим видом розгортки, причому оптична вісь одного з положень розгортки вибирається так, щоб лазерний промінь описував коло на проїжджій частині перехрестя в області стоп-ліній всіх його підходів, а другий промінь розгортки формується в одній площині з першим, але зі зміщенням на півперіоду по колу розгортки, а оптичну вісь першого променя, що формує вихідну межу контрольованої зони в області стопліній, змінюють по черзі через кожен період сканування так, щоб радіус другого концентричного кола на поверхні проїжджої частини зменшувався на певну задану величину, що дозволяє визначити тип і напрямки руху транспортних засобів по кожній смузі руху і їх затримки в контрольованій зоні з урахуванням часу її проїзду кожним конкретним типом транспортного засобу, після чого визначають реальний час проїзду кожним транспортним засобом зони самого перехрестя за моментами перетину їх задніми бамперами спочатку кола сканування в області стоп-ліній на вході перехрестя, а потім цього ж кола на його виході і далі визначають транспортну затримку проїзду зони перехрестя як різницю між реальним часом проїзду цієї зони і середнім часом проїзду зони перехрестя кожним типом транспорту у заданому напрямку, при цьому загальна затримка транспортних засобів по кожній смузі руху за вибраний час виміру визначається як сума затримок транспортних засобів в контрольованій зоні та затримок цих транспортних засобів в зоні самого перехрестя, а середня затримка транспортного засобу на перехресті визначається як середньозважена середніх затримок по кожній смузі перехрестя, 5 UA 122470 U 5 10 15 який відрізняється тим, що сканування зони перехрестя другим лазерним променем здійснюють, починаючи з внутрішнього кола з заданим радіусом, і поступово покроково розширяють коло сканування з заданою величиною кроку зміною положень кутів розгортки в реперній точці на кожному періоді до моменту, коли надійно визначаються зони початку уповільнення будь-якого ТЗ по смугах руху на підходах до перехрестя, або зони кінця прискорення на виходах з перехрестя, а значення прискорення і уповільнення визначаються по зміні швидкості транспортних засобів на будь-яких двох сусідніх смугах сканування другого променя і потім відбувається повернення другого променя з послідовним зменшенням радіусів сканування в зворотному напрямку на кожному періоді до внутрішнього початкового кола сканування та багаторазове повторення цього процесу для визначення кількості транспортних засобів у черзі по кожній смузі руху на момент зміни сигналу на зелений, їх прискорення і уповільнення, габарити і тип, точки і моменти початку уповільнення на підходах до перехрестя та закінчення розгону на виході з перехрестя, значення реального часу проїзду зони виміру, що визначаються за моментами початку уповільнення і закінчення прискорення, відповідні інтервали часу проїзду дистанції виміру у вільних умовах, затримки транспортних засобів як різницю між реальним часом проїзду зони виміру та часом проїзду цієї зони у вільних умовах руху, і далі визначення середньої затримки по кожній смузі і перехресті в цілому за будь-який час виміру. 6 UA 122470 U Комп’ютерна верстка О. Гергіль Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G08G 1/09
Мітки: регульованому, засобів, спосіб, транспортних, перехресті, затримок, визначення
Код посилання
<a href="https://ua.patents.su/9-122470-sposib-viznachennya-zatrimok-transportnikh-zasobiv-na-regulovanomu-perekhresti.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення затримок транспортних засобів на регульованому перехресті</a>
Спосіб визначення транспортних затримок на регульованому перехресті
Номер патенту: 84752
Опубліковано: 25.10.2013
Автор: Денисенко Олег Васильович
МПК: G08G 1/00, B60W 40/105
Мітки: спосіб, транспортних, перехресті, визначення, затримок, регульованому
Формула / Реферат:
Спосіб визначення транспортних затримок на регульованому перехресті, оснований на фіксації транспортних засобів, що в'їжджають у контрольовану зону і виїжджають з неї по їх задніх бамперах, із затримкою, рівною середньому часу проїзду транспортними засобами контрольованої зони, визначенні поточної довжини черги транспортних засобів в контрольованій зоні, визначенні сумарної за період вимірювання транспортної затримки в контрольованій зоні...
Спосіб визначення транспортних затримок на регульованому перехресті
Номер патенту: 109680
Опубліковано: 25.09.2015
Автор: Денисенко Олег Васильович
МПК: G08G 1/09
Мітки: регульованому, визначення, перехресті, спосіб, транспортних, затримок
Формула / Реферат:
Спосіб визначення транспортних затримок на регульованому перехресті, оснований на фіксації транспортних засобів, що в'їжджають у контрольовану зону і виїжджають з неї по їх задніх бамперах, із затримкою, рівною середньому часу проїзду транспортними засобами контрольованої зони, визначенні поточної довжини черги транспортних засобів в контрольованій зоні, визначенні сумарної за період вимірювання транспортної затримки в контрольованій зоні...
Спосіб визначення транспортних затримок на регульованому перехресті
Номер патенту: 77622
Опубліковано: 25.02.2013
Автори: Денисенко Олег Васильович, Левтеров Андрій Іванович, Ярута Антон Миколайович
МПК: G08G 1/09
Мітки: затримок, спосіб, транспортних, регульованому, перехресті, визначення
Формула / Реферат:
Спосіб визначення транспортних затримок на регульованому перехресті, заснований на фіксації транспортних засобів, що в'їжджають у контрольовану зону, розташовану перед "Стоп-лінією" регульованого перехрестя, із затримкою, рівною середньому часу проїзду транспортними засобами контрольованої зони, визначенні поточної довжини черги транспортних засобів в контрольованій зоні, визначенні сумарної за період вимірювання транспортної...
Спосіб визначення затримок транспортних засобів на нерегульованому перехресті
Номер патенту: 88590
Опубліковано: 25.03.2014
Автор: Денисенко Олег Васильович
МПК: G08G 1/09
Мітки: затримок, перехресті, визначення, засобів, транспортних, нерегульованому, спосіб
Формула / Реферат:
Спосіб визначення транспортних затримок на нерегульованому перехресті, оснований на фіксації транспортних засобів, що в'їжджають у контрольовану зону і виїжджають з неї по їх задніх бамперах, із затримкою, рівною середньому часу проїзду транспортними засобами контрольованої зони, визначенні поточної довжини черги транспортних засобів в контрольованій зоні, визначенні сумарної за період вимірювання транспортної затримки в контрольованій зоні...
Спосіб визначення затримок транспортних засобів на нерегульованому перехресті
Номер патенту: 105751
Опубліковано: 10.06.2014
Автор: Денисенко Олег Васильович
МПК: G08G 1/056, G08G 1/065
Мітки: перехресті, транспортних, спосіб, нерегульованому, засобів, визначення, затримок
Формула / Реферат:
Спосіб визначення транспортних затримок на нерегульованому перехресті, заснований на фіксації транспортних засобів, що в'їжджають у контрольовану зону і виїжджають з неї по їх задніх бамперах, із затримкою, рівною середньому часу проїзду транспортними засобами контрольованої зони, визначенні поточної довжини черги транспортних засобів в контрольованій зоні, визначенні сумарної транспортної затримки за період вимірювання в контрольованій зоні...