Пристрій для визначення рельєфу та рівня поверхні матеріалів





Текст
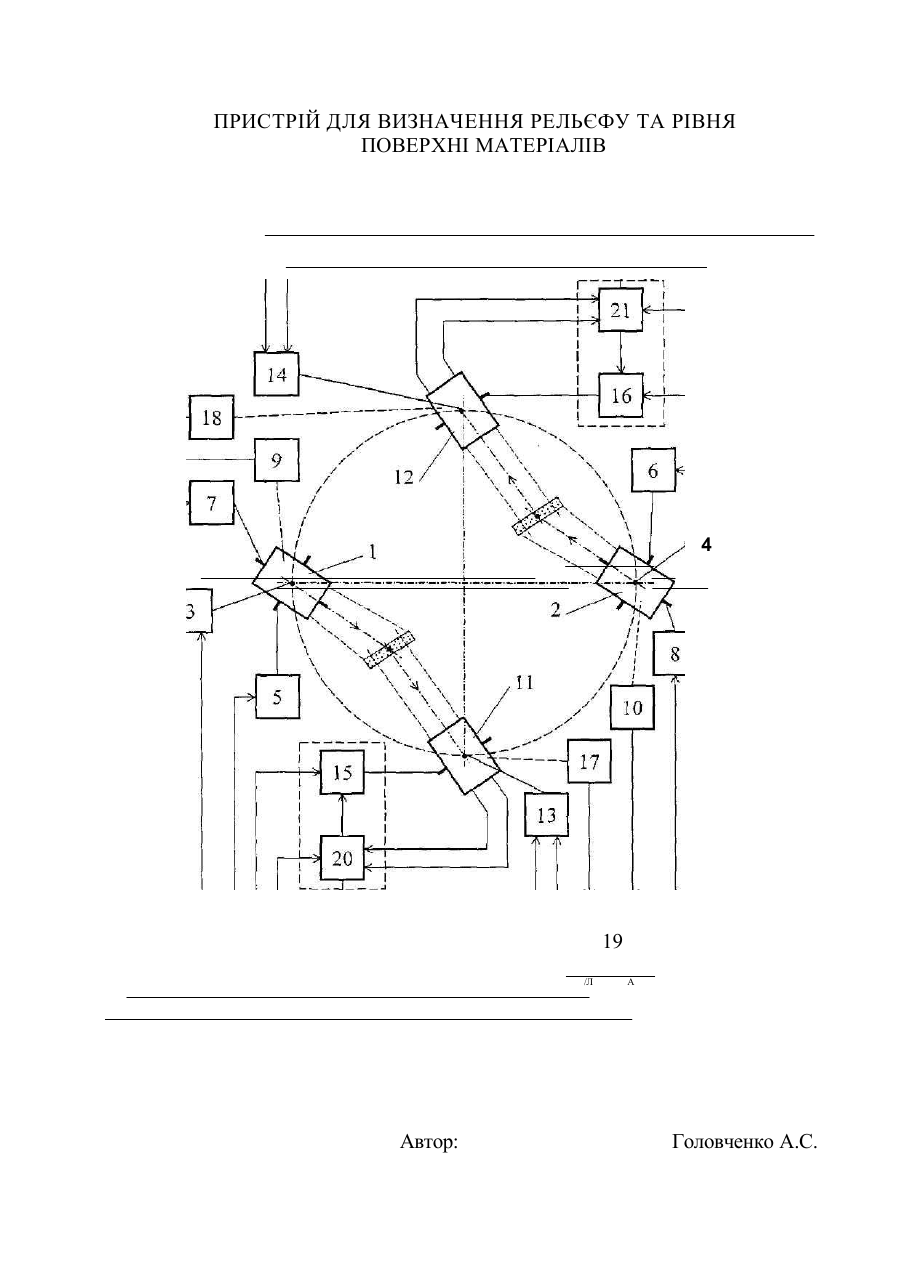
> 9В09Ш8 МПК 6 G01 В 15/04 ПРИСТРІЙ ДЛЯ ВИЗНАЧЕННЯ РЕЛЬЕФУ ТА РІВНЯ ПОВЕРХНІ МАТЕРІАЛІВ Винахід належить до вимірювальної техніки, зокрема, до вимірювання контурів поверхні з допомогою іонізуючого випромінювання, і може бути використаний для визначення рельєфу та рівня поверхні шихтових матеріалів на колоснику домни. Відомі пристрої для визначення рельєфу та рівня поверхні матеріалів, що вміщують блоки джерела і приймача іонізуючого випромінювання з коліматорами, механізмами поворотів і датчиками положення, обчислювальний блок, що підключений своїми входами до виходів датчиків положення [патент 37922552 США, кл. 250 — 435, 1974 p.]. Недолік цих пристроїв полягає в низькій надійності при високім рівні засипки матеріалів і великих розмірах контрольованої поверхні. Найбільш близьким по технічній суті є пристрій для визначення рельєфу та рівня поверхні матеріалів, що вміщує блоки джерела і приймача іонізуючого випромінювання з коліматорами, механізмами поворотів відносно нерухомих і рухомих осей і датчиками положення, обчислювальний блок, що підключений своїми входами і виходами відповідно до виходів датчиків положення і входів механізмів поворотів [ах. 1240166 СССР, кл. G O1 В 15/04, заявл. 03.11.82, не публікується]. Недолік цього пристрою полягає в необхідності використання джерел іонізуючого випромінювання з високою загальною активністю, що спричиняє недостатній рівень радіаційної безпеки експлуатації пристрою. В основу винаходу поставлена задача удосконалення пристрою для визначення рельєфу та рівня поверхні матеріалів, в якому завдяки виконанню коліматорів блоків джерела рухомими з механізмами поворотів відносно осей колімації і введенню нових зв'язків між механізмами поворотів забезпечується зниження необхідної активності джерел іонізуючого випромінювання в декілька разів при збереженні високої надійності контролю поверхні і за рахунок цього значно підвищується радіаційна безпека умов експлуатації пристрою. Поставлена задача вирішується тим, що в пристрої для визначення рельєфу та рівня поверхні матеріалів, який вміщує блоки джерела і приймача іонізуючого випромінювання з коліматорами, механізмами поворотів відносно нерухомих і рухомих осей і датчиками положення, обчислювальний блок, що підключений своїми входами і виходами відповідно до виходів датчиків положення і входів механізмів поворотів, згідно з винаходом, коліматори блоків джерела І і ! І ] 1 \ j ] ! І і виконані рухомими відносно осей колімації л механізмами поворотів, п ідкл юченим и св о їми входам и до відпо відн и х ви ход ів обчислювального блока, а механізми поворотів блоків приймача відносно рухомих осеіІ підключені своїми додатковими виходами до додаткових входів інших механізмів поворотів. На рисунку приведена структурна схема запропонованого пристрою. Пристрій для визначення рельефу ти рівня поверхні матеріалів в одному з варіантів його виконання вміщує блоки 1, 2 джерела іонізуючого шшрамїшоваїшя з коліматорами, механізмами поворотів З,.. 8 5 датчиками положения 9 f ID їх осей колімації, блоки ! l f 12 пршімача іонізуючого випромінювання з коліматорами, механізмами поворотів 13..* 16 і датчиками положення 17t 18 їх осей колімації, обчислювальний блок 19, який своїми входами підключений до виходів датчиків положення 9, 10, 17, 18, а виходами - до входів механізмів поворотів 3...8 і 13...16. Механізми поворотів 15, 16 : виконані з блоками 20, 21 розпізнавання сигналів, підключеними своїми входами до виходів обчислювального блока 19 і відповідних виходів блоків приймача. Перші виходи блоків 20 і 21 підключені до інших входів механізмів поворотів відповідно 15 і 16, а другі виходи до входів механізмів поворотів відповідно З, 13 і 4, 14. Механізми поворотів 3, 4, 13, 14 виконані з можливістю здійснювати оглядові повороти блоків відповідно 1, 2, 11, 12 відносно їх перших осей, встановлених нерухомо. Перші (нерухомі) осі блоків джерела і приймача можуть бути розміщені вертикально, як це зображено на рисунку, або іншим чином в залежності від умов використання пристрою. Механізми поворотів 5, 6, 15, 16 виконані з можливістю здійснювати пеленгуючі повороти блоків відповідно 1, 2, 11, 12 відносно їх других осей, встановлених з можливістю обертатись відносно перших (нерухомих) осей під дією механізмів поворотів відповідно 3, 4, 13, 14. Механізми поворотів 7 і 8 виконані з можливістю здійснювати повороти коліматорів блоків 1 і 2 відносно їх третіх осей, суміщених з осями колімації цих блоків і встановлених з можливістю обертатись відносно других осей під дією механізмів поворотів 5 і6 і відносно перших осей разом з другими осями. Блоки джерела і приймача розміщені над контрольованою поверхнею на одному рівні симетрично, як це показано на рисунку, або на різних рівнях в залежності від умов використання пристрою. Коліматор кожног о блока джере ла виконаний у вигляді щілини, форма якої забезпечує формування в площині колімації плоского пучка іонізуючого випромінювання і відповідної опроміненої зони витянутої форми обмежених розмірів на контрольованій поверхні (коліматор на рисунку не показаний). Вісь колімації кожного блока джерела проходить в площині колімації посередині пучка іонізуючого з шшромінкжтня через центр опроміненої зони. Кожен j блоків приймача має два детектора відбитого від контрольованої поверхні іонізуючого випромінюваний,, НИХОДЇІ ЯКИХ підключені до ВХОДІВ відповідних блоків ролшпавшшя сішш-гїв приймача (детектори на рисунку не тжіштл}, Коліматор коленого блока приймана створює направленість детекторів таким мнаюм, що виділяються два пучка іонізуючого випромінювання, яке відбивається від обмежених за розміром приймальних зон на котрольованій поверхні в напрямку відповідного блока приймача (коліматор на рисунку не показаний). Детектори розміщені і орієнтовані коліматором симетрично відносно площини колімації відповідного блока приймача, яка суміщена з другою віссю його повороту і перепишеться а контрольованою поверхню по лінії межування двох приймальних зон. Вісь колімації блока прийманії проходить в площині його колімації через середину спільної межі двох приймальних зон і центр відповідного блока приймача. Запропонований пристрій в другому варіанті його виконання вміщує один блок джерела і один блок приймача з відповідними коліматорами, механізмами поворотів, датчиками положення, обчислювальний блок. В цьому варіанті блоки джерела і приймача розміщені діаметрально протилежно один одному (другий варіант виконання пристрою на рисунку не показаний). Пристрій працює таким чином. В початковому стані один з блоків джерела, наприклад, блок 1, своєю віссю колімації орієнтований у вертикальній площині, що проходить через центр першої початкової ділянки поверхні, з якої планується почати контроль поверхні. Ця початкова ділянка поверхні вибирається, наприклад, на периферії контрольованої поверхні поблизу блоків 1 і 11 на рівних відстаннях від блоків 1 і 11. Блок 11 своєю віссю колімації орієнтований у вертикальній площині, що проходить через центр першої початкової ділянки контрольованої поверхні. При цьому осі колімації блоків 1 і 11 перетинаються над контрольованою поверхнею. Блок джерела 2 в початковому стані орієнтований своєю віссю колімації у вертикальній площині, що проходить через центр другої початкової ділянки поверхні, яка вибрана, наприклад, в центрі контрольованої поверхні. Блок 12 приймача своєю віссю колімації орієнтований у вертикальній площині, що проходить через центр другої початкової ділянки контрольованої поверхні. При цьому осі колімації блоків 2 і 12 перетинаються над контрольованою поверхнею. Площини колімації блоків 1 і 2 джерела в початковому стані повернені з допомогою механізмів 7 і 8 поворотів коліматорів так, що лінії їх перетину з площинами колімації відповідних блоків приймача розташовані горизонтально. Далі, при необхідності контролю поверхні матеріалів, блоки джерела \ гфийміїча разом з відповідними механізмами поворотів виводяться по сигналам блока 1У в режим пеленгуючих поворотів відносно їх других осей- Пеленгуючі повороти здійснюються так, що гоніт перетину осей колімації відповідних блоків джерела і приймача (точки локації) наближаються до контрольованої поверхні. При цьому блоки ирііимача її і і2 разом з механізмами поворотів ІЗ і \G виконують роль ведучих блоків, які задають повороти їх осей колімації у відповідності з першими сигналами разбалансу на перших виходах блоків 20 і 21 розпізнавання, а блоки джерел 1 ї 2 разом з механізмами поворотів 5 і 6 виконують роль ведених блоків, які пропорційно (сіпхрошто) повторюють відповідні повороти блоків № і 12 по сигналам блока 19 так, ідо точки локації переміщуються а першій контрольованії! вертикальній площині. Відносно цієї площини блок 1 знаходиться симетрично блоку 11, а блок 2 - симетрично блоку 12. При цьому, у випадку вертикального розміщення перших (нерухомих) осей, блоки джерела і приймача залишаються нерухомими відносно їх перших осей, і тому точки локації наближаються до центрів відповідних початкових ділянок контрольованої поверхні по вертикалі. В разі інших варіантів розміщення перших осей блоків джерела і приймача одночасно з пеленгуючими поворотами здійснюються сінхронні оглядові повороти відповідних блоків джерела і приймача відносно їх перших осей з допомогою механізмів поворотів 3, 4, 13, 14 по сигналам блока 19 так, що точки локації наближаються до центрів відповідних початкових ділянок контрольованої поверхні по вертикалі. В процесі цих оглядових поворотів блоки 11 і 12 також викопують роль ведучих блоків, а блоки 1 і 2 - роль ведених блоків. Сінхронізація оглядових поворотів здійснюється по другим сигналам розбалансу, які формуються обчислювальним блоком 19 пропорційно ступеню просторової розбіжності між осями колімації відповідних блоків джерела і приймача за відомим способом [а.с. 1807309 СССР, кл. G О\ В 15/04, опубл. 07.04.93]. В процесі наближення точок локації до контрольованої поверхні механізми поворотів 7 і 8 обертають коліматори блоків 1 і 2 по сигналам блока 19 так, що лінії перетину площин колімації відповідних блоків джерела і приймача безперервно розташовуються горизонтально. В режимі пеленгуючих поворотів блоків 11 і 12 безперервно формуються перші сигнали розбалансу блоками розпізнавання 20 і 21 на їх перших виходах, під впливом яких здійснюється пеленгування. Формування перших сигналів розбалансу здійснюється шляхом порівняння інтенсивностей вихідних сигналів детекторів відповідних блоків приймача. В процесі цього порівняння інтенсивності сигналів детекторів автоматично коригуються з 5 допомогою обчислювального блока 19 так, що компенсується негативний вплив нерівномірності радіаційного фону на точність пеленгування, який мас нестаціонарний характер і залежить від координат гочок локації. Далі, блоки І, 2, II і 12 зупиняються на вихідних позиціях першого етапу контролю поверхні матеріалів при нульових значеннях перших сигналів разбалансу в моменти, коли їх осі колімації орієнтовані на даггрм відповідних початкових ділянок контрольованої поверхні, тобто коли точки локації співпадають :І центрами початкових ділянок поверхні Черс-j визначений інтервал часу після початку виведення блоків джерела і приймача в режим пеленгування починаються по сигналам блока 19 оглядові повороти блоків 11 р 12 і сікхронізованї з ними оглядові повороти блоків \, 2 відносно їх перших осей з допомогою механізмів поворотів 13f 14 і 3, 4 так, що точки локації переміщуються в першій контрольованій вертикальній площині в одному напрямку. При цьому продовжуються пеленгуючі повороти блоків джерела і приймача відносно других їх осей з допомогою механізмів поворотів 5, 6, 15 і 16 та згадана вище автоматична компенсація негативного впливу нерівномірності радіаційного фону шляхом відповідного коригування інтенсивностей сигналів детекторів, що забезпечує безперервне суміщення точок локації з контрольованою поверхнею з високою надійністю і точністю. Таким чином, точки локації переміщуються по першому профілю поверхні, який створений внаслідок перетину поверхні першою контрольованою вертикальною площиною. При цьому координати точок локації, які практично співпадають з контрольованою поверхню, безперервно визначаються обчислювальним блоком 19 по сигналам датчиків положення 9, 10, 17, 18. Швидкість оглядових поворотів автоматично регулюється пропорційно сигналам на других виходах відповідних блоків 20 і 21 розпізнавання, які формуються шляхом безперервного визначення сумарної інтенсивності сигналів на виходах детекторів відповідних блоків приймача. Таке регулювання дозволяє підвищити швидкість контролю у випадках підвищеної інтенсивності відбитих сигналів, тобто в найбільш сприятливих умовах контролю, без втрат в надійності контролю та зберегти високу надійність контролю за рахунок автоматичного зниження швидкості контролю у випадках заниженої інтенсивності відбитих сигналів, тобто в несприятливих умовах контролю. Завдяки цьому суттєво зменшується необхідна активність джерел іонізуючого випромінювання. В процесі переміщення точок локації по контрольованій поверхні коліматори блоків 1 і 2 автоматично обертаються відносно третіх осей, суміщених з осями колімації, з допомогою механізмів поворотів 7 і 8 по сигналам блока 19 таким чином, що лінія перетину площини колімації кожного блока джерела з контрольованою поверхнею практично співпадає за напрямком зі спільною межею двох прийомних зон відповідного блока приймача. Таке регулювання поворотів коліматорів відносно їх осей колімації дозволяє створити умови мінімуму фонової частини вихідних сигналів детекторів блоків приймача, які по своїй природі мають випадковий характер. Завдяки цьому рівень флуктуації по підношенню до корисної складової чатини цих сигналів суттєво знижується, що забезпечує можливість зниження необхідної активності джерел іонізуючого випромінювання при збереженні високої надійності пеленгування. Крім того, зниження фонової частини вихідних сигналів детекторів блоків приймача сприяє підвищенню ефективності регулювання швидкості оглядових поворотів блоків джерела і приймача по сигналам блоків 20 і 21 на їх других виходах, тобто додатковому зниженню необхідної активності джерел іонізуючого випромінювання. Далі, в момент закінчення контролю першого профілю поверхні матеріалів, починається по сигналам блока 19 підготовка до контролю другого профілю поверхні матеріалів. При цьому блок 1 орієнтується своєю віссю колімації у вертикальній площині, що проходить через центр контрольованої поверхні (центр третьої початкової ділянки), блок 12 повертається в свій початковий стан орієнтації його осі колімації у вертикальній площині, що проходить через центр контрольованої поверхні, блок 11 продовжує свої оглядові повороти в тому ж напрямку до співпадання його осі колімації з вертикальною площиною, що проходить через центр четвертої початкової ділянки контрольованої поверхні, а блок 2 обертається в протилежному напрямку до співпадання його осі колімації з вертикальною площиною, що проходить через центр четвертої початкової ділянки. Четверта початкова ділянка вибирається на периферії контрольованої поверхні поблизу блоків 2 і 11 на рівних відстанях від блоків 2 і 11. Після цього блоки 1, 2, 11, 12 виводяться по сигналам блока 19 в режим виведення на вихідні позиції другого етапу контролю контролю другого профілю поверхні, який створений внаслідок перетину поверхні матеріалів другою контрольованою вертикальною площиною. Ця площина розташована перпендикулярно першій вертикальній контрольованій площині так, що відносно неї блок 1 знаходиться симетрично блоку 12, а блок 2 - симетрично блоку 11. Виведення блоків 1, 2, 11, 12 на вихідні позиції для контролю другого профілю поверхні здійснюється аналогічно їх виведенню на вихідні позиції першого етапу контролю з той лише різницею, що повороти блока 1 сінхронізовані з поворотами блока 12, повороти блока 2 сінхронізовані з поворотами блока 11. У вихідних позиціях другого етапу контролю точки локації співпадають з центрами третьої і четвертої початкових ділянок контрольованої поверхні. Чсрел шиначеіши інтервал часу пкля початку нинедеїшя бл
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for determination of relief and level of surface of materials
Автори англійськоюHolovchenko Anatolii Semenovych
Назва патенту російськоюУстройство определения рельефа и уровня поверхности материалов
Автори російськоюГоловченко Анатолий Семенович
МПК / Мітки
МПК: G01B 15/00
Мітки: рельєфу, поверхні, рівня, визначення, пристрій, матеріалів
Код посилання
<a href="https://ua.patents.su/9-31479-pristrijj-dlya-viznachennya-relehfu-ta-rivnya-poverkhni-materialiv.html" target="_blank" rel="follow" title="База патентів України">Пристрій для визначення рельєфу та рівня поверхні матеріалів</a>
Спосіб визначення рельєфу та рівня поверхні матеріалів
Номер патенту: 31522
Опубліковано: 15.12.2000
Автор: Головченко Анатолій Семенович
МПК: G01F 23/28, G01B 15/00
Мітки: спосіб, визначення, матеріалів, рівня, поверхні, рельєфу
Текст:
...17.,.20, І відповідають умові стрибкоподібної зміни температури. Така уме аиникас в зоні стикуванняt контрольованої поверхні 1 зі стінками колосники г тобто в шуканих точках 13.. Л 6. Попередні значення координат додаткових точок поверхні площинах 21 і 22 задають у відповідності з типовими розрахункова профілями 23 і 24 поверхні, причому ці профілі суміщують попередньо визначеними точками відповідно 15, 8, 16 і 13, 9, Додаткові...
Пристрій для визначення рівня та профілю поверхні матеріалів
Номер патенту: 31477
Опубліковано: 15.12.2000
Автор: Головченко Анатолій Семенович
МПК: G01F 23/28
Мітки: поверхні, матеріалів, рівня, пристрій, профілю, визначення
Текст:
...блока 8 розпізнавання сигналів ї лінії затримки 9. Блок 8 розпізнавання сигналів підключений своїми входами до виходів детекторів IL..6 блока 1 джерела мсрс;і відповідні канали лшіх затримки 9 і до виходу детектора блоки 7 приймача. Блоки джерела 1 і приймача 7 виконані нерухомими і можуть бути, об'єднані із єдиний блок. Блок 1 джерела колїмошікіш так, що формується багато вузьких пучків анігіляційного гама-внпромішощщня, які орієнтовані...
Пристрій контролю рівня електропровідних матеріалів у ємності
Номер патенту: 20966
Опубліковано: 16.10.2000
Автори: Стаднік Микола Іванович, Мезніков Артур Володимирович, Ведерніков Олександр Іванович, Зальцведель Віктор Брунович
МПК: B65G 43/00
Мітки: матеріалів, ємності, електропровідних, рівня, пристрій, контролю
Формула / Реферат:
1. Способ контроля уровня, включающий в себя контроль исправности линии связи оперативной цепи, заключающийся в периодическом контроле в линии связи тока одного направления, возникающего при замыкании цепи массой контролируемого материала, и тока противоположного направления, наличие которого характеризует исправные системные линии связи, отличающийся тем, что длительность периода увеличивают, например до 1 с, а в нем устанавливают...
Спосіб визначення температури кюрі поверхні феромагнітних матеріалів
Номер патенту: 31050
Опубліковано: 15.12.2000
Автори: Сидоренко Сергій Іванович, Васильєв Михайло Олексійович, Філіппов Олександр Сергійович
МПК: G01R 33/12, G01K 13/00
Мітки: спосіб, визначення, матеріалів, поверхні, температури, феромагнітних, кюрі
Текст:
...Кюрі визначається шляхом аналізу характерних особливостей на графіках залежності вимірюваной характеристики від температури, шо обумовлені переходом матеріалу з феромагнітного до парамагнітного стану. Недоліками такого способу також є необхідність використання для вимірювань зразків порівняно великої маси (декілька грамів і більше), неможливість проведення визначення температури Кюрі в м ікрооб'смах речовини, наприклад у тонких...
Пристрій для визначення рівня рідини в резервуарі
Номер патенту: 6455
Опубліковано: 29.12.1994
Автори: Половніков Валєрій Алєксандровіч, Алєксандров Михайло Миколайович, Жуков Юрій Даниїлович, Гордєєв Борис Миколайович
МПК: G01F 23/24
Мітки: рідини, рівня, визначення, резервуарі, пристрій
Формула / Реферат:
(57) Устройство для определения уровня жидкости в резервуаре, содержащее чувствительный элемент, выполненный в виде двух изолированных друг от друга проводников, подключенный к выходу генератора и входу приемника, выход которого соединен со входом усилителя, и индикатор, отличающееся тем, что в него введены не менее двух чувствительных элементов, расположенных на разных уровнях и подключенных к выходу генератора и входу приемника, и...
Попередній патент: Спосіб ведення доменної плавки
Наступний патент: Гвинтова передача
Випадковий патент: Спосіб корекції цитокінового статусу організму хворих на бешиху з наявністю гнійно-запальних ускладнень хірургічного профілю