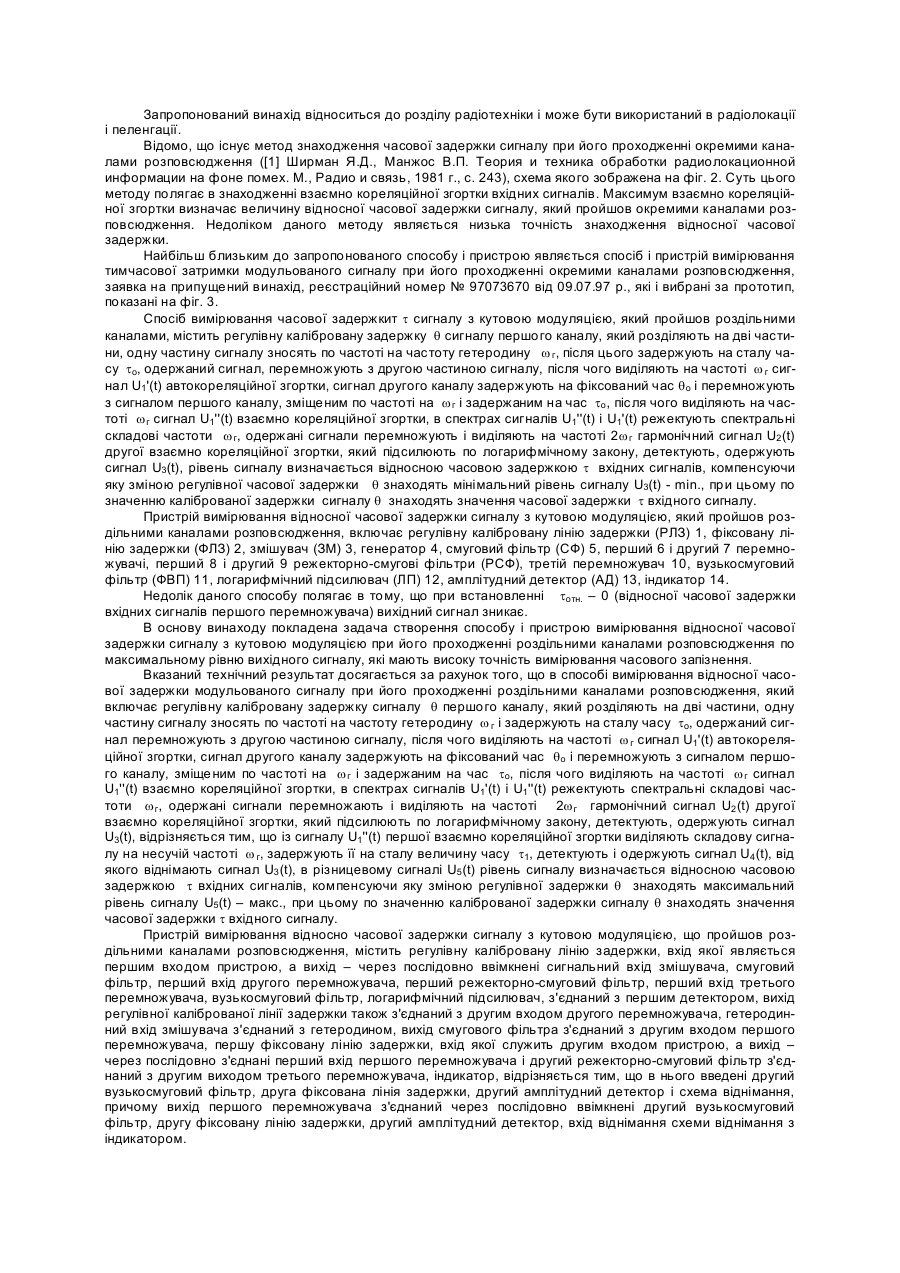
Спосіб вимірювання тимчасової затримки модульованого сигналу при його проходженні окремими каналами розповсюдження та пристрій для його здійснення
Номер патенту: 42816
Опубліковано: 15.11.2001
Автори: Лігінов Сергій Михайлович, Литвиненко Валентин Іванович, Сорочан Анатолій Григорович

Формула / Реферат
1.Спосіб вимірювання тимчасової затримки ![]() модульованого сигналу при його - проходженні окремими каналами розповсюдження, містить регульовану калібровану затримку
модульованого сигналу при його - проходженні окремими каналами розповсюдження, містить регульовану калібровану затримку ![]() сигналу першого каналу, який відносять по частоті на частоту гетеродина wr і затрмують на сталу величину
сигналу першого каналу, який відносять по частоті на частоту гетеродина wr і затрмують на сталу величину ![]() ,потім перемножують з сигналом другого каналу і виділяють на частоті гетеродина wr сигнал U"1(t) взаємно-кореляційної згортки, який відрізняється тим, що сигнал з кутовою модуляцією перед перемножуванням і виділенням взаємно-кореляційної згортки, сигнал другого каналу затримують, на фіксований час затримки
,потім перемножують з сигналом другого каналу і виділяють на частоті гетеродина wr сигнал U"1(t) взаємно-кореляційної згортки, який відрізняється тим, що сигнал з кутовою модуляцією перед перемножуванням і виділенням взаємно-кореляційної згортки, сигнал другого каналу затримують, на фіксований час затримки ![]() ,в першому каналі сигнал з peгyльованою каліброваною затримкою
,в першому каналі сигнал з peгyльованою каліброваною затримкою ![]() перемножують з сигналом, зміщеним по частоті на wr і затримують на час
перемножують з сигналом, зміщеним по частоті на wr і затримують на час ![]() , і виділяють на частоті гетеродина wr сигнал U'1(t) автокореляційної згортки, в спектрах сигналів U'1(t) і U"1(t) режектують спектральні складові частоти wr одержані сигнали перемножують і виділяють на частоті 2wr гармонійний сигнал другої взаємно-кореляційної згортки, який підсилюють по логарифмічному закону, одержують сигнал U2(t), рівень рівень якого сигналу визначається величиною відносної часової затримки вхідних сигналів
, і виділяють на частоті гетеродина wr сигнал U'1(t) автокореляційної згортки, в спектрах сигналів U'1(t) і U"1(t) режектують спектральні складові частоти wr одержані сигнали перемножують і виділяють на частоті 2wr гармонійний сигнал другої взаємно-кореляційної згортки, який підсилюють по логарифмічному закону, одержують сигнал U2(t), рівень рівень якого сигналу визначається величиною відносної часової затримки вхідних сигналів ![]() , компенсуючи відносну часову затримку першого і другого каналів зміною регульованої калібрюваної затримки
, компенсуючи відносну часову затримку першого і другого каналів зміною регульованої калібрюваної затримки ![]() сигналу, при якій знаходять U2(t)=0, потім за величиною каліброваної затримки сигналу
сигналу, при якій знаходять U2(t)=0, потім за величиною каліброваної затримки сигналу ![]() знаходять значення відносної часової затримки вхідних сигналів
знаходять значення відносної часової затримки вхідних сигналів ![]() для сигналів з іншими типами модуляції перед вказаною обробкою сигналу здійснюють перетворення початкового типу модуляції в кутову модуляцію.
для сигналів з іншими типами модуляції перед вказаною обробкою сигналу здійснюють перетворення початкового типу модуляції в кутову модуляцію.
2.Пристрій вимірювання тимчасової затримки модульованого сигналу при його проходженні окремими каналами розповсюдження, що містить регульовану калібровану лінію затримки вихід якої з'єднаний з сигнальним входом змішувача, гетеродинний вхід якого з'єднаний з виходом гетеродину, а вихід - через перший смуговий фільтр з другим входом першого перемножувача, вузькосмуговий фільтр, амплітудний детектор, індикатор, який відрізняється тим, що в нього введені перший і другий комутатори, перші входи яких є відповідно першим і другим входами пристрою, додаткові перший і другий входи пристрою з'єднані відповідно через ідентичні послідовно ввімкнені перший детектор, перший керований напругою генератор і другий детектор, другий керований напругою генератор з другими входами відповідно першого і другого комутаторів, вихід першого комутатора з'єднаний із входом регульованої лінії затримки, вихід якої також з'єднаний з другим входом другого перемножувача, перший вхід якого з'єднаний з виходом першого смугового фільтра, вихід другого комутатора через фіксовану лінію затримки з'єднаний з першим входом першого перемножувача, вихід першого і другого перемножувачів з'єднані відповідно через ідентичні послідовно ввімкнені другий смуговий фільтр, перший режекторний фільтр і третій смуговий фільтр, другий режекторний фільтр відповідно з першим і другим входами третього перемножувача, вихід якого через послідовно ввімкнені вузькосмуговий фільтр, логарифмічний підсилювач, амплітудний детектор з'єднаний з індикатором.
Текст
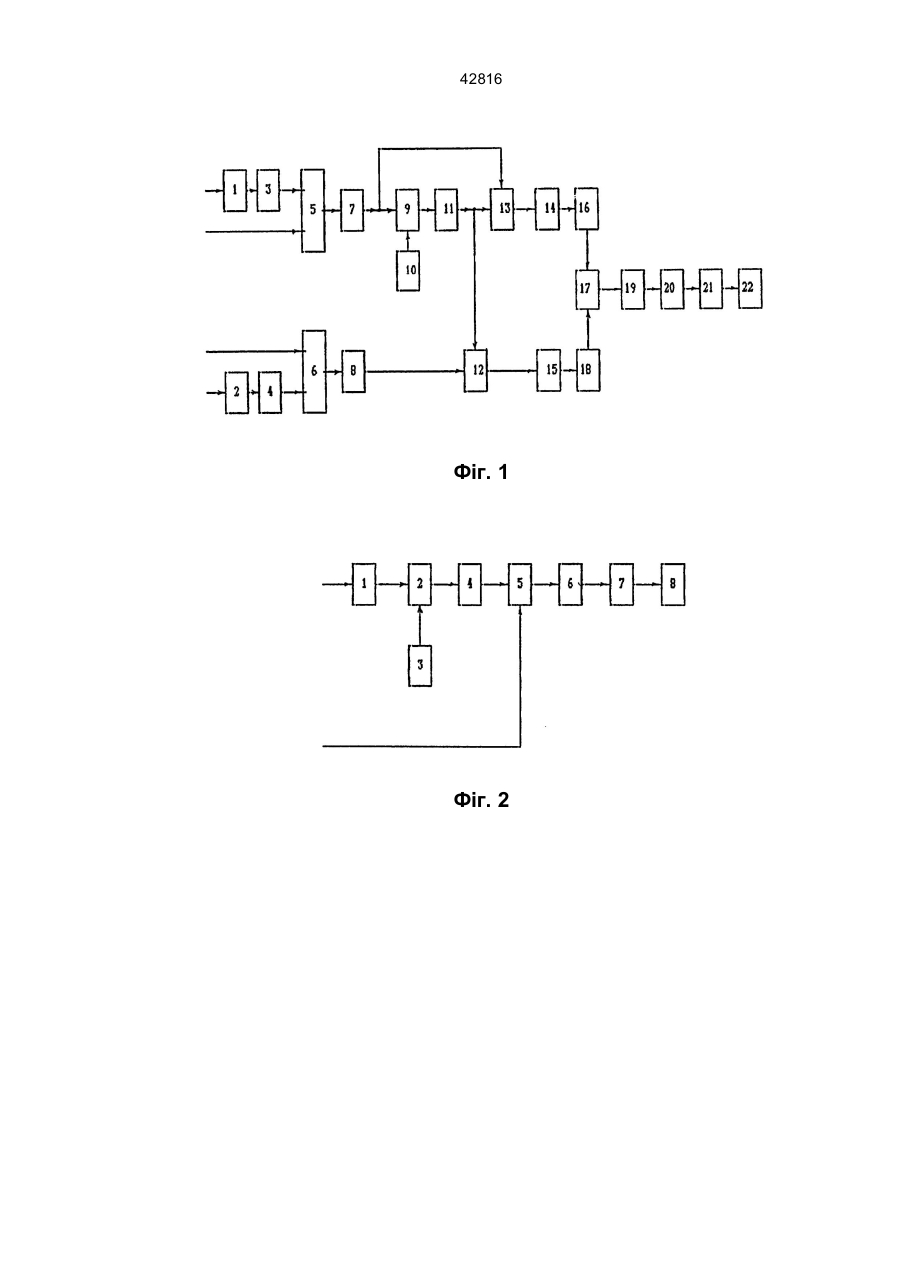
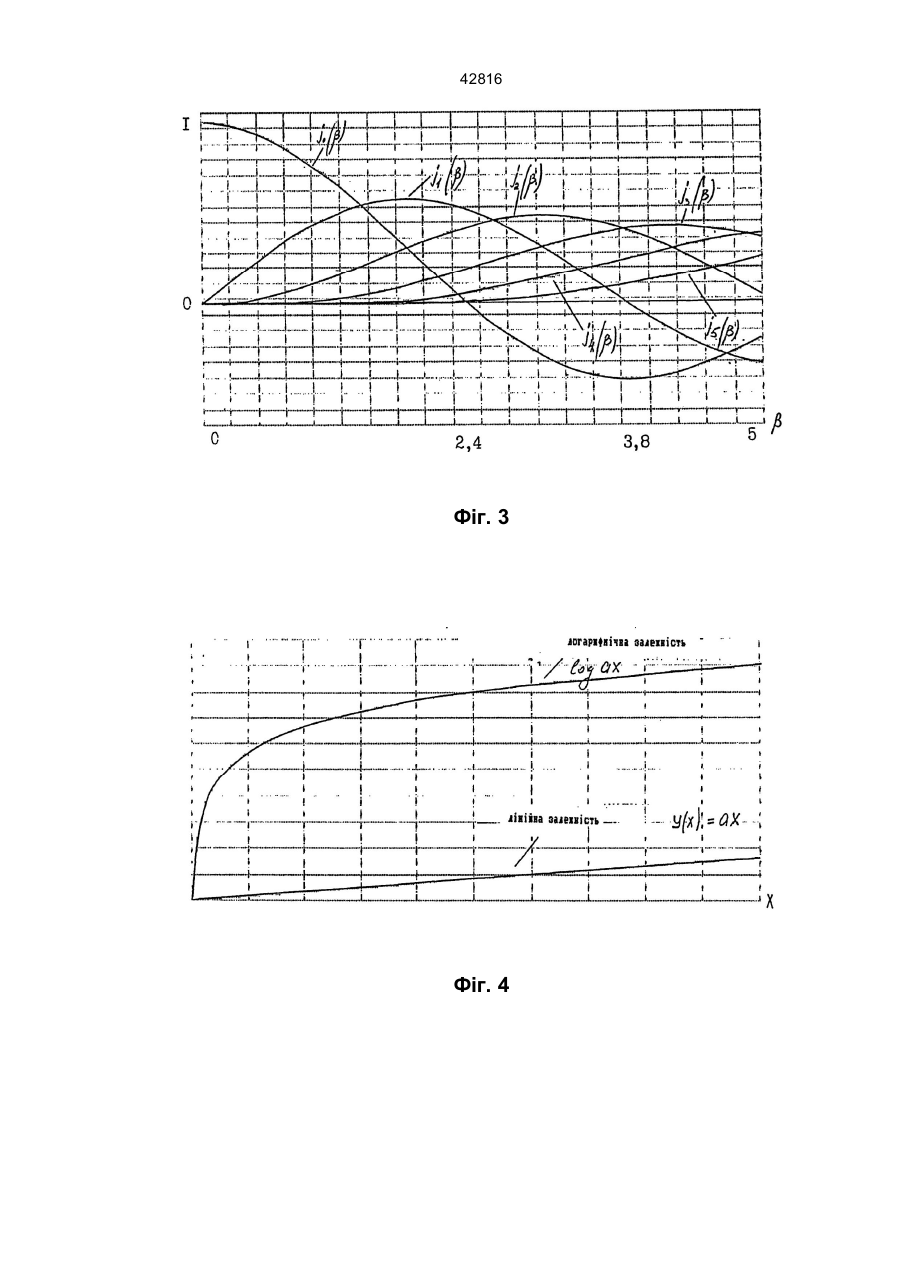
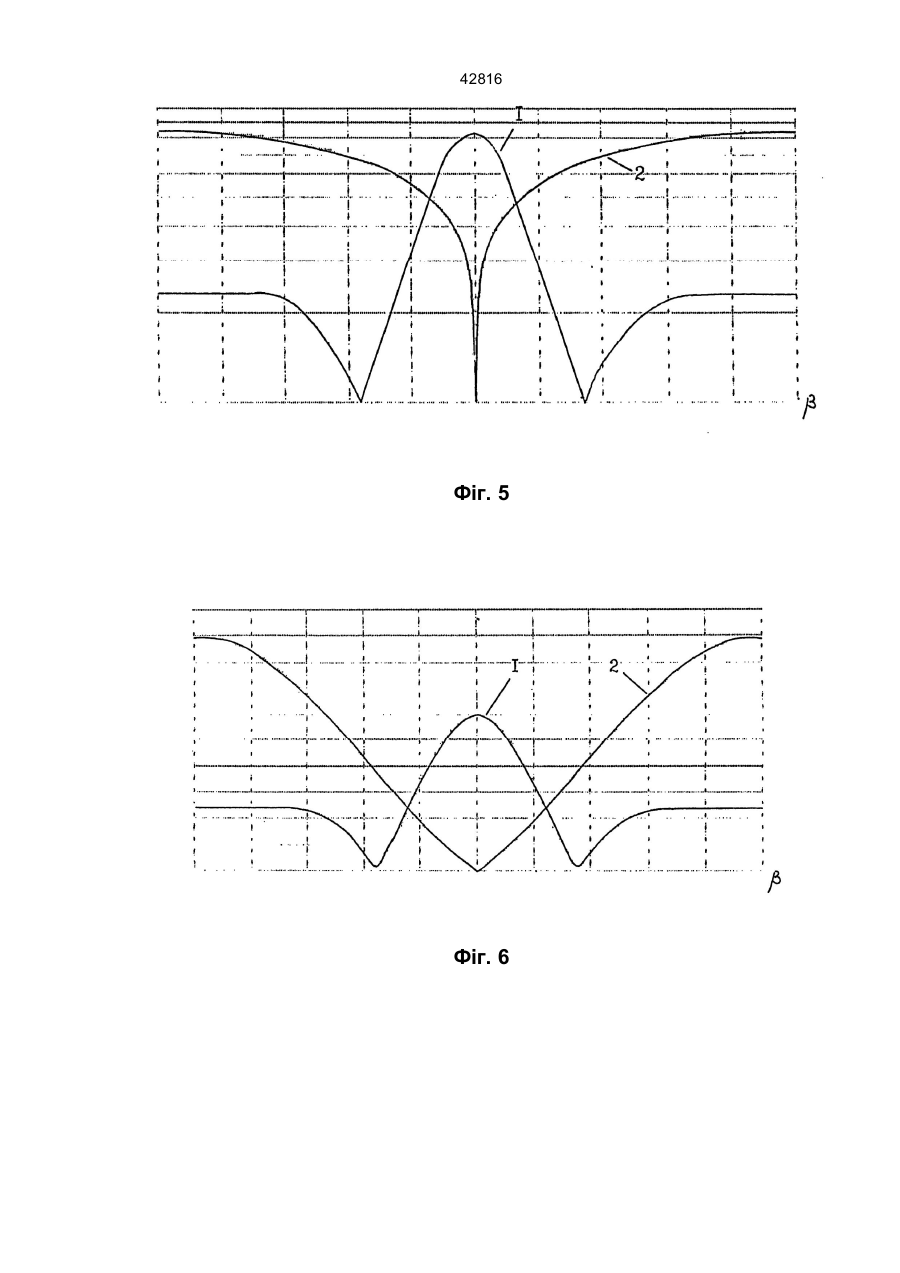
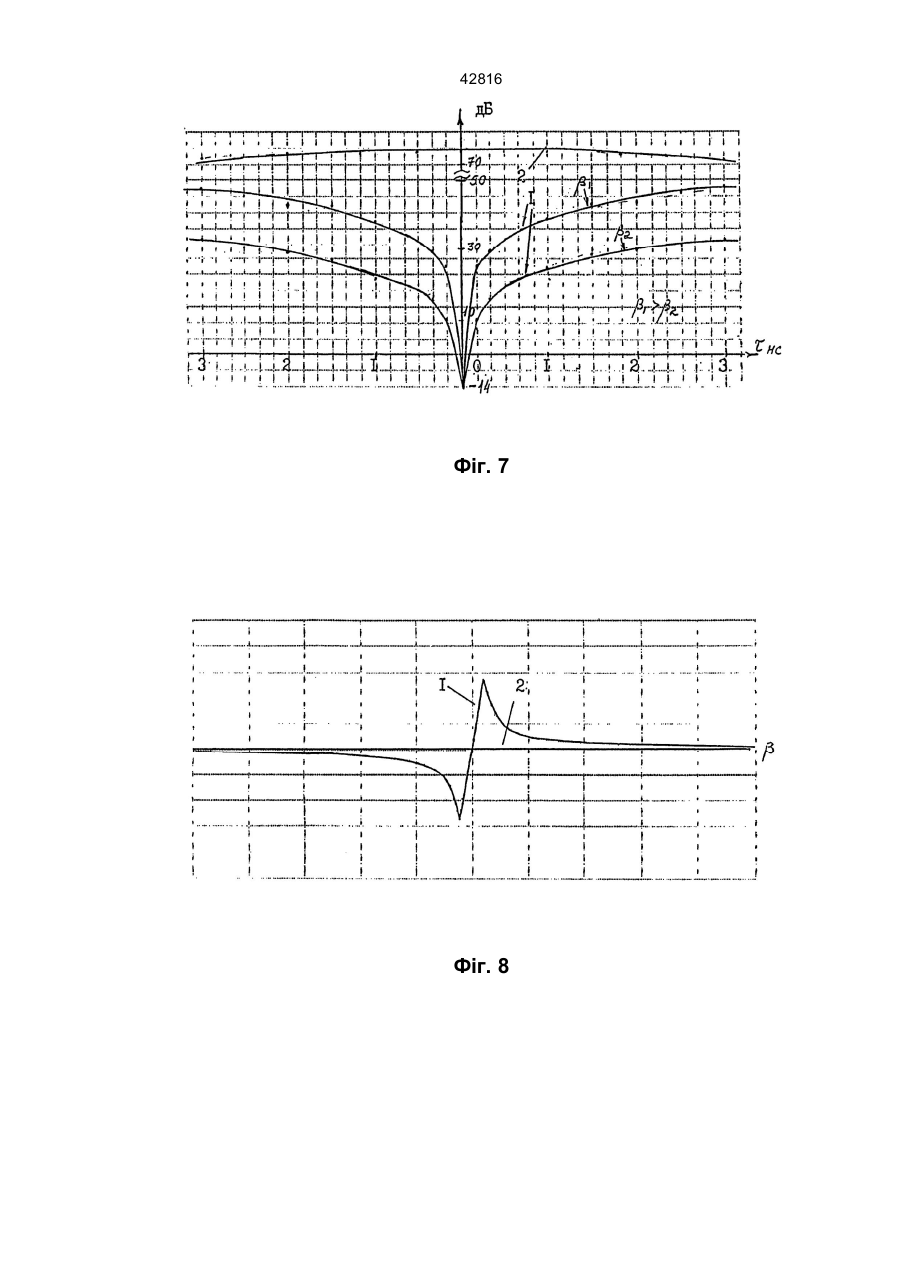
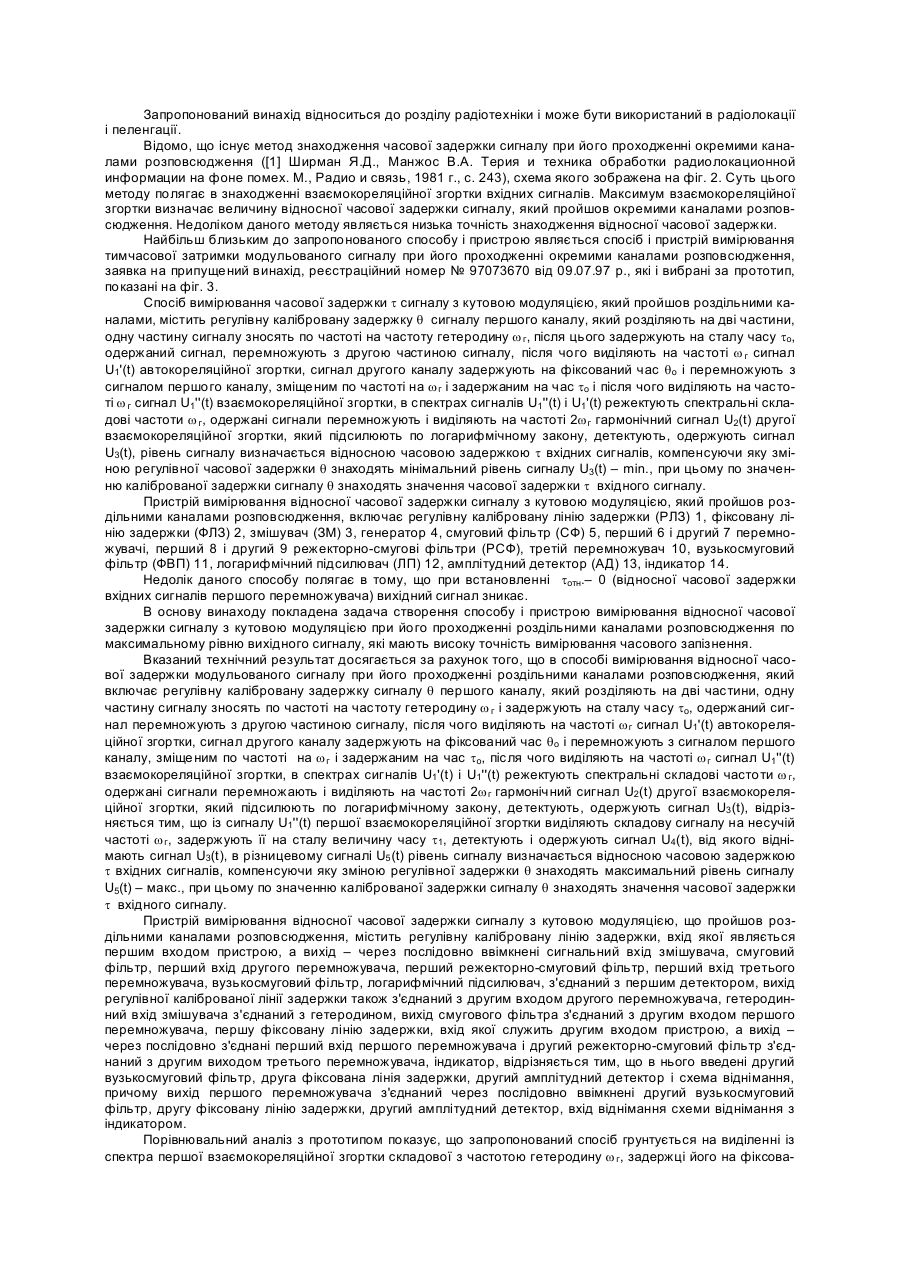
42816 Запропонований винахід відноситься до галузі радіотехніки і може бути використаний в радіолокації і пеленгації. Відомо, що існує метод підвищення точності знаходження часової затримки при кореляційній обробці, суть якого полягає в диференціюванні обвідної кореляційного відеоімпульсу [1]. Недоліком даного методу і пристрою є вимога високого відношення сигнал/шум вхідних сигналів. Найбільш близькими до запропонованого способу і пристрою є спосіб і пристрій, описані в [2] і зображені на фіг. 2, які обрані за прототип. Спосіб вимірювання часової затримки t сигналу, що пройшов роздільними каналами, включає регульовану калібровану затримку сигналу першого каналу відносно другого каналу, сигнал першого каналу зносять за частотою на частоту w г гетеродина і затримують за часом на сталу величину t, перемножують сигнали обох каналів і виділяють на частоті w г сигнал U2(t) взаємно-кореляційної згортки, змінюючи значення регульованої калібро- ваної затримки сигналу, знаходять U2(t) - макс., за значенням каліброваної затримки визначають відносну часову затримку. Пристрій вимірювання відносної часової затри- мки t сигналу, який пройшов роздільними каналами, містить регульовану лінію затримки (РЛЗ) 1, змішувач (ЗМ) 2, генератор (Г) 3, смуговий фільтр (СФ) 4, перемножувач (Х) 5, вузькосмуговий фільтр (ВСФ) 6, амплітудний детектор (АД) 7 і індикатор 8. Недоліком даного пристрою є низька точність знаходження відносної часової затримки вхідних сигналів. Розглянемо принцип обробки за прототипом сигналу, який пройшов двома роздільними каналами. Вважаємо, що вхідний сигнал з кутовою модуляцією, модульований гармонійним сигналом з індексом модуляції b. Таким чином, вхідні сигнали запишуться U ( t ) = U cos [wc t + b sin (W t )] для першого каналу і U ( t - t ) = U cos [wc ( t - t) + b sin [W ( t - t)]] для другого каналу. Сигнал U(t), пройшовши РЛЗ 1 (вважаємо затримку в ній рівною q, буде U ( t - t ) = U × cos [wc ( t - q) + b sin [W ( t - q)]]. Сигнал U(t-t), зміщений на частоту гетеродину w г і затриманий в смуговому фільтрі СФ 4 на час t0, записується в вигляді é(ωc - ωг ) (t - t - to) +ù U1( t - t - t0 ) = U1 cos ê ú. ë+ β sin [ W( t - t - t0 ] û В результаті перемножування сигналів U(t - θ) і U( t - t - t 0 ) в перемножувачі Х5 сигнал на його виході описується виразом éwг t + j + 2b sin [ W ( t + t 0 - q)] ´ ù U1( t ) = U1 cos ê ú. ´ cos( W t + j1 ) ë û Тоді на виході вузькосмугового фільтра ВСФ 6 сигнал буде описуватися виразом U2 ( t ) = U2J 0 ( b1 ) × cos [ wг t + j ] , (1) де b 1=2b sin[W(t+t0-q)]. При змінюванні величини затримки q в РЛЗ рівень напруги на виході ВСФ 6 буде описуватись поведінкою функції Бесселя J0 ( b) . При цьому максимальне значення U2(t) маємо при (t+to-q) - 0, за яким і визначаємо часову затримку вхідного сигналу, а отже, і місцеположення джерела випромінювання. На фіг. З наведені залежності функцій Бесселя від величини індексу модуляції, з яких видно, що довкола b»0 функція J0 ( b) Бесселя має пологу ве- ршину (тобто крутість пеленгаційної характеристики довкола цієї точки наближається до нуля), що й зумовлює недолік даного пристрою - низьку точність знаходження часової затримки. В основу винаходу покладена задача створення способу і пристрою вимірювання відносної часової затримки модульованого сигналу при проходженні роздільними каналами розповсюдження, які мають високу точність вимірювання часового запізнення. Вказаний технічний результат досягається за рахунок того, що спосіб вимірювання тимчасової затримки модульованого сигналу при його проходженні окремими каналами розповсюдження містить регульовану калібровану затримку сигналу q першого каналу, який зносять за частотою на частоту 42816 гетеродина w г і затримують на сталу величину часу t0, після чого перемножують з сигналом другого каналу і " виділяють на частоті w г сигнал U1 (t ) взаємно-кореляційної згортки, який відрізняється тим, що для сигналу з кутовою модуляцією перед перемножуванням і виділенням взаємно-кореля- ційної згортки, сигнал другого каналу затримують на фіксований час затримки q0, в першому каналі сигнал з регульованою каліброваною затримкою q перемножують з сигналом, зсунутим за частотою на w г і затриманим на час t0 і виділяють на ' ' " частоті гетеродина w г сигнал U1( t ) автокореляційної згортки, в спектрах сигналів U1 (t ) і U1 (t ) режектують спектральні складові частоти w г, одержані сигнали перемножують і виділяють на частоті 2w г гармонічний сигнал другої взаємно-кореляційної згортки, який підсилюють за логарифмічним законом, одержують сигнал U2 (t ) , рівень якого визначається величиною відносної часової затримки вхідних сигналів t і значенням регульованої затримки сигналу q, компенсуючи відносну часову затримку першого і другого каналів зміною регульованої каліброваної затримки сигналу, знаходять сигнал U2 (t ) - 0, за величиною каліброваної затримки сигналу визначають значення відносної часової затримки вхідних сигналів, для сигналів з іншими видами модуляції перед вказаною обробкою сигналу здійснюють перетворення початкового типу модуляції в кутову. Пристрій вимірювання тимчасової затримки модульованого сигналу при його проходженні ок- ремими каналами розповсюдження містить регульовану калібровану лінію затримки, вихід якої з'єднаний з сигнальним входом змішувача, гетеродинний вхід якого з'єднаний з виходом гетеродина, а вихід, через перший смуговий фільтр, - з другим входом першого перемножувача, вузькосмуговий фільтр, амплітудний детектор, індикатор, введені перший і другий комутатори, перші входи яких є, відповідно, першим і другим входами пристрою, додаткові перший і другий входи пристрою з'єднані, відповідно, через ідентичні, послідовно ввімкнені, перший детектор, перший керований напругою генератор і другий детектор, другий керований напругою генератор з другими входами, відповідно, першого і другого комутаторів, вихід першого комутатора з'єднаний із входом регульованої лінії затримки, вихід якої також з'єднаний з другим входом другого перемножувача, перший вхід якого з'єднаний з виходом першого смугового фільтра, вихід другого комутатора через фіксовану лінію затримки з'єднаний з першим входом першого перемножувача, виходи першого і другого перемножувачів з'єднані, відповідно, через ідентичні, послідовно ввімкнені, другий смуговий фільтр, перший режекторний фільтр і третій смуговий фільтр, другий режекторний фільтр, відповідно, з першим і другим входами третього перемножувача, вихід якого через послідовно ввімкнені вузькосмуговий фільтр, логарифмічний підсилювач, амплітудний детектор з'єднаний з індикатором. Порівняльний аналіз з прототипом показує, що запропонований спосіб грунтується на застосуванні додаткової автокореляційної обробки в першому каналі, з виділенням в кожному каналі модульованого сигналу на частоті допоміжного сигналу w г і режектуванні несучої частоти w г в кожному каналі з наступною додатковою взаємно-кореляційною обробкою цих сигналів, логарифмічним підсилюванням результату додаткової взаємно-кореля- ційної обробки. Для обробки сигналів з іншими видами модуляції, які відрізняються від кутової, вхідні сигнали додатково перетворюють в сигнали з ЧМ-модуляцією. Запропонований пристрій відрізняється наявністю нових функціональних елементів і зв’язками між ними, тобто додатково введені: перемножувачі, смугові фільтри, режекторні фільтри, лінія фіксованої затримки, логарифмічний підсилювач, комутатори, детектори і генератори, керовані на- пругою. Таким чином, запропонований спосіб і пристрій відповідає критерію на винахід "Новизна". Проведений аналіз технічних рішень показав, що способи і пристрої із схожою сукупністю ознак відсутні, таким чином, запропонований спосіб і пристрій вимірювання відносної затримки модульованого сигналу при проходженні окремими каналами розповсюдження відповідає критерію "Винахідницький рівень". На фіг. 1 наведена структурна схема запропонованого пристрою. На фіг. 2 наведена структурна схема прото типу. На фіг. З наведені функції Бесселя. На фіг. 4 наведені функціональні залежності - лінійна і логарифмічна. На фіг. 5 наведені розрахункові пеленгаційні характеристики прототипу (1) і запропонованого пристрою (2). На фіг. 6 наведена розрахункова пеленгаційна характеристика запропонованого пристрою без логарифмічного підсилювача. На фіг. 7 наведена експериментальна пеленгаційна характеристика запропонованого пристрою 1 і прототипу 2. На фіг. 8 наведені розрахункові залежності крутості пеленгаційних характеристик запропонова- ного пристрою 1 і прототипу 2. Розглянемо принцип запропонованого способу обробки модульованого сигналу при проходженні роздільними каналами розповсюдження. Для наочності будемо вважати, що вхідний сигнал кутової модуляції промодульований гармонійним сигналом з індексом модуляції b. Таким чином, сигнал, який пройшов двома роздільними каналами запишеться: U ( t ) = U cos [wc t + b sin ( Wt )] , U ( t - t ) = U cos [wc ( t - t ) + b sin [W ( t - t )]] , 42816 де t - час відносної затримки сигналів в каналах розповсюдження; w с - частота сигналу; Ω - модулююча частота; U - амплітуда вхідних сигналів. Сигнал першого каналу з регульованою каліброваною затримкою відносно другого запишеться U ( t - q) = U × cos [wc ( t - q) + b sin [W ( t - q)]] , де q - встановлювана величина затримки сигналу. Сигнал з регульованою каліброваною затримкою U(t-q), зсунутий по частоті на w г і затриманий на час t0, буде мати вигляд é(ωc - ωг ) (t - q - to) +ù U ( t - q - t0 ) = Ucos ê ú. ë+ β sin [ W( t - q - t0 ] û Сигнал другого каналу U(t-t), затриманий на сталу часову затримку q0, буде é ωc (t - tc - qo) + ù U( t - t - q0) = Ucos ê ú. ë+ β sin [ W(t - t - q0 ]û Автокореляційна згортка сигналу регульованої каліброваної затримки, U(t-q) з сигналом U(t-q-to), зміщеним за частотою на частоту гетеродина w г і затриманим на час t0 ' U1( t ) = U1 cos[ wг t + b' cos( Wt - j" ) + j'1 ] , 0 де b' - індекс модуляції сигналу після автокореляційної згортки першого каналу. Перша взаємно-кореляційна згортка сигналів першого каналу з регульованою каліброваною затримкою зміщених по частоті на w г і затриманих на t0 з сигналом другого каналу з фіксованою затримкою q0 ' ' U1' ( t ) = U1 cos[ wг t + b'' cos( Wt - j" ) + j1' ] , 0 де b" - індекс модуляції сигналу після взаємно-кореляційної згортки другого каналу. ' " Спектри сигналів U1 (t ) і U1 (t ) , зображені функціями Бесселя, будуть описуватися виразами: для першого каналу. ¥ ü ì ' ' ' ïJo (b ) × cos( wг t + j1 ) + å Jm (b ) × cos ( wг t + ï ï ï m =1 ' U1( t ) = U1 í ý, ¥ ï mWt ) + ( -1)m × J (b' ) × cos ( w t - mWt ) ï å m t ï ï m =1 þ î для другого каналу { ' ' U1' ( t ) = U1 Jo (β '' ) · cos(ωr t + φ'1 + · cos(ωτ t + mWt ) + ¥ å Jm (β' ' ) · m =1 ¥ å(-1)m · Jm (β'' ) · cos(ωτ t - mWt)} m =1 де Jm(b) - функція Бесселя m-го порядку. Після режектування несучого коливання частотою w г спектри 1 1 сигналів U¢ (t ) і U¢¢(t ) будуть складатись з двох спектральних бічних складових, які є прямим та інверсним спектрами модулюючого коливання sin (Ω×t),тобто ì ¥ ï ' U1p = U1 í å J m (β ' ) cos(ω τ t + mW t ) + ïm =1 î + ¥ å (-1)mJm (β' ) cos(ωτ t - mWt )} m =1 ì ¥ ï ' U1'p = U1 í å Jm (β' ' ) cos(ω τ t + mWt ) + ïm =1 î 42816 + ¥ å (-1)mJm (β '' ) cos(ωτ t - mWt)} m =1 U¢ (t ) U¢¢ (t ) Сигнали 1p і 1p , що здатні до взаємнокореляційної згорткиі і виділенню з її вихідного сигналу складової на частоті 2w г, в результаті отримаємо ' 2 U'2 (t ) = U'1p (t) · U'1p (t) = 2U1 ¥ 2 åJm(β' ) · Jm(β'' ) · cos( ωτ t) m=1 Після логарифмічного підсилення, сигнал U¢2 (t ) записується U2t=log[ 2 2U1 ¥ å Jm (β ' ) · Jm (β '' )] · cos(2ωτ t) m =1 в отриманому виразі, який описує сигнал, Jm( β¢ )=const, тому що β’=βΩτo визначається постійними величинами β, Ω, τo. В той же час β"= βΩτo=βΩ(θ-τ-θo+τo) величина змінна, яка визначається відносною часовою затримкою τ вхідних сигналів і величиною каліброваної затримки θ сигналу першого каналу. Так як 1 1 θ o = θ max + τ o , θ max = τ max 2 в той же час як 2 - максимально можлива відносна затримка вхідних сигналів. Тому значення β',в залежності від значень θ і τ,буде приймать значення от 0 до деякого максимального '' значення βmax - 2 . Враховуючи приведені докази, сигнал U2 (t) можна записати як é ¥ ù U2 ( t ) = logê å AmJm (β '' )ú · cos(2ω τ t ) êm =1 ú ë û (2) 2 A m = 2U1 Jm (β ' ) = const Зміна індексу модуляції β" в сигналі U2 (t) здійснюється зміною регульованої каліброваної затримки θ сигналу U(t-θ). При зміні величини регульованої каліброваної затримки θ сигналу U(t-θ) таким чином, що τотн. буде монотонно зменшуватись до нуля і при деякій величині θ- θn сигнал U2t перетворюється в нуль (тобто τотн=( θn-τ-θo–τo)=0, звідки виходить τ =( θn-θo-τo), при подальшій зміні регульованої каліброваної затримки θ і переході вихідної напруги U2t через нуль крутість пеленгаційної характеристики в точці U2t=0 змінює свій знак на протилежний, тобто крутість пеленгаційної характеристики довкіл точки τ отн= -0 наближається до нескінченю великого значення (слід звернути увагу, що в прототипі крутість наближається до нуля, для порівняння див. фіг.8), що свідчить про значну перевагу запропонованого методу. Пристрій (фіг.1) вимірювання тимчасової затримки модульованого сигналу, який пройшов роздільними каналами розповсюдження, містить регульовану калібровану лінію затримки 7, вихід якої з'єднаний з сигнальним входом змішувача 9 .гетеродинний вхід якого з'єднаний з виходом гетеродину 10, а вихід через перший смуговий фільтр 11 з другим входом першого перемножувача 12, вузькосмуговий фільтр 19, амплітудний детектор 21, індикатор 22,відрізняється тим, що в нього введені перший 5 і другий 6 комутатори, перші входи яких є відповідно першим і другим входом пристрою, додаткові перший і другий входи пристрою з'єднані відповідно через ідентичні послідовно ввімкнені перший 1 детектор, перший З керований напругою генератор і другий 2 детектор, другий 4 керований напругою генератор з другими входами відповідно першого 5 і другого 6 комутаторів, вихід першого 5 комутатора з'єднаний з входом регульованої каліброваної лінії затримки 7, вихід якої також з'єднаний з другим входом другого 13 перемножувача, перший вхід якого з'єднаний з виходом першого 11 смугового фільтра, вихід другого 6 комутатора через фіксовану 8 лінію затримки з'єднаний з першим входом першого 12 перемножувача, виходи першого 12 і другого 13 перемножувачів з'єднані відповідно через ідентичні послідовно ввімкнені другий 15 смуговий фільтр, перший 18 режекторний фільтр і третій 14 смуговий фільтр, другий 16 режекторний фільтр з першим і другим входами третього 17 перемножувача, вихід якого через послідовно ввімкнені вузькосмуговий 19 фільтр, логарифмічний 20 підсилювач, амплітудний 21 детектор з'єднаний з індикатором 22. Пристрій працює так: частотно-модульовані сигнали U(t) і U(t- τ) поступають відповідно на перший і другий входи пристрою. Сигнал з першого входу пристрою в регульованій лінії затримки 7 затримується на час θ і надходить на другий вхід другого 13 перемножувача і сигнальний вхід змішувача 9, на гетеродинний вхід якого поступає сигнал гетеродина 10 частотою ω τ. Виділений і затриманий на час то першим смуговим фільтром 11 сигнал проміжної частоти (ω с-ω т) подається на другий вхід першого 12 і перший вхід другого 13 перемножувачів. В результаті перемножування вхідних сигналів другим 13 перемножувачем на його виході утворюється ФМ-сигнал із сталим індексом модуляції β. Сигнал з другого входу пристрою через фіксовану 8 лінію затримки затримується на час θо і надходять на перший вхід першого перемножувача 12, де на його виході за результатом перемножування утворюється ФМ-сигнал із змінним індексом модуляції β". На виходах першого 12 і другого 13 перемножувачів сформовані ФМ-сигнали частоти ω т фільтруються смуговими фільтрами 15 і 14,проходять через режекторні фільтри 18 і 16,частота, режекці'і яких ω т. 42816 Затримка першого 11 смугового фільтра то обрана такою, щоб рівень бічних спектральних складових в ' U1( t ) які визначаються функціями Бесселя J1(β'), на виході другого 13 перемножувача був максимальним. Рівень цих спектральних складових на виході першого 12 перемножувача буде визначаться різницею часових затримок сигналів по його першому і другому входах то, θ і θо, τ тобто відносним часом затримки перемножуваних сигналів першим 12 перемножувачем (θ-τ-θо+ τо)- τотн. Вибором величини часової затримки θ в РЛЗ 7 можна змінювати відносну часову затримку τ отн. вхідних сигналів першого 12 перемножувача, при цьому рівень бокових спектральних складових в його вихідному сигналі буде також змінюватись, причому при β"
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for measuring the time delay of modulated signal when passing it by separate propagation channels, and an appliance for its realization
Автори англійськоюSorochan Anatolii Hryhorovych, Lytvynenko Valentyn Ivanovych, Lihinov Serhii Mykhailovych
Назва патенту російськоюСпособ измерения временной задержки модулированного сигнала при его прохождении отдельными каналами распространения и устройство для его осуществления
Автори російськоюСорочан Анатолий Григорьевич, Литвиненко Валентин Иванович, Лигинов Сергей Михайлович
МПК / Мітки
МПК: G01S 3/00
Мітки: вимірювання, спосіб, окремими, модульованого, затримки, тимчасово, пристрій, розповсюдження, здійснення, каналами, проходженні, сигналу
Код посилання
<a href="https://ua.patents.su/9-42816-sposib-vimiryuvannya-timchasovo-zatrimki-modulovanogo-signalu-pri-jjogo-prokhodzhenni-okremimi-kanalami-rozpovsyudzhennya-ta-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання тимчасової затримки модульованого сигналу при його проходженні окремими каналами розповсюдження та пристрій для його здійснення</a>
Спосіб вимірювання відносної часової затримки сигналу з кутовою модуляцією при його проходженні роздільними каналами розповсюдження і пристрій для його здійснення
Номер патенту: 42067
Опубліковано: 15.10.2001
Автори: Литвиненко Валентин Іванович, Сорочан Анатолій Григорович, Лігінов Сергій Михайлович
МПК: G01S 3/00
Мітки: сигналу, роздільними, кутовою, часової, здійснення, затримки, модуляцією, проходженні, вимірювання, спосіб, відносної, каналами, пристрій, розповсюдження
Формула / Реферат:
1. Спосіб вимірювання відносної часової затримки t сигналу з кутовою модуляцією, при його проходженні роздільними каналами розповсюдження, що містить регульовану калібровану затримку q сигналу першого каналу, який розділяють на дві частини, одну частину сигналу відносять по частоті на частоту гетеродину wг і затримують на сталу часу t0, одержаний сигнал перемножують з другою частиною сигналу, після чого виділяють на частоті wг сигнал
Спосіб вимірювання відносної часової затримки сигналу з кутовою модуляцією при його проходженні роздільними каналами розповсюдження і пристрій для його здійснення
Номер патенту: 42074
Опубліковано: 15.10.2001
Автори: Лігінов Сергій Михайлович, Литвиненко Валентин Іванович, Сорочан Анатолій Григорович
МПК: G01S 3/00
Мітки: модуляцією, здійснення, проходженні, кутовою, затримки, часової, розповсюдження, пристрій, роздільними, відносної, сигналу, каналами, спосіб, вимірювання
Формула / Реферат:
1. Спосіб вимірювання відносної часової затримки t сигналу з кутовою модуляцією, при його проходженні роздільними каналами розповсюдження, який включає регульовану калібровану затримку q сигналу першого каналу, який розгалужують на дві частини, одну частину сигналу зсувають по частоті на частоту гетеродина wг і затримують на постійну часу t0 , одержаний сигнал перемножують з другою частиною сигналу, після чого виділяють на частоті wг сигнал...
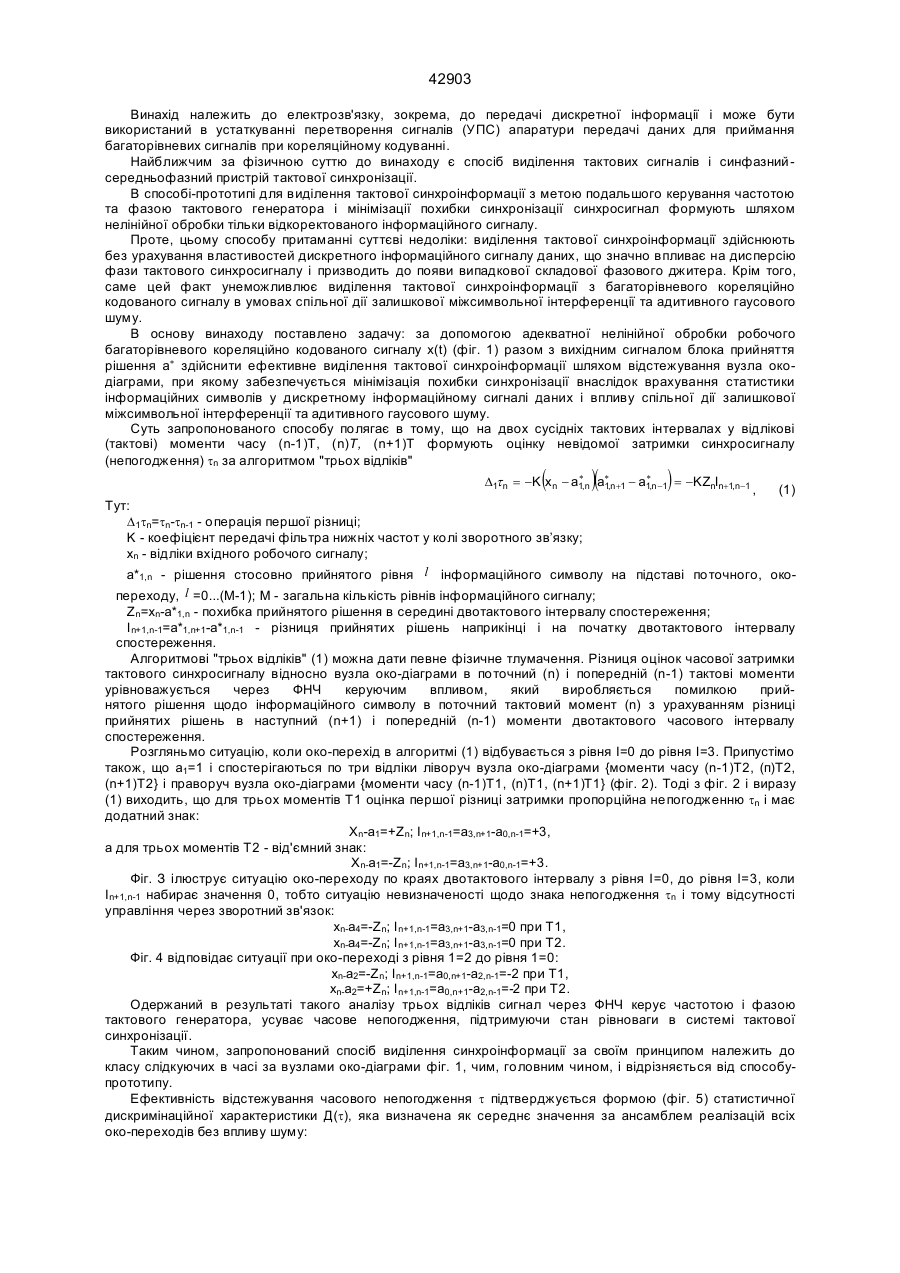
Спосіб виділення тактового синхросигналу з кореляційно кодованого інформаційного сигналу та пристрій для його здійснення
Номер патенту: 42903
Опубліковано: 15.11.2001
Автори: Ланько Анатолій Анатолійович, Пантелєєв Віктор Володимирович, Гаврилюк Марко Савелійович
Мітки: спосіб, кореляційної, синхросигналу, інформаційного, пристрій, виділення, кодованого, сигналу, тактового, здійснення
Формула / Реферат:
1. Спосіб виділення тактового синхросигналу з кореляційно кодового інформаційного сигналу, який полягає в тому, що тактовий синхросигнал формують шляхом нелінійної обробки відкоректованого інформаційного сигналу, який відрізняється тим, що значення і знак тактового непогодження визначають на двотактному інтервалі безпосередньо з поточних око-переходів і використовують цю інформацію через зворотний зв'язок за прийнятим рішенням для відстеження...
Спосіб визначення залежності швидкості розповсюдження акустичних коливань від їх інтенсивності і пристрій для його здійснення
Номер патенту: 34594
Опубліковано: 15.03.2001
Автори: Скрипник Юрій Олексійович, Лісовець Сергій Миколайович
МПК: G01N 29/07, G01H 5/00, G01N 29/00
Мітки: швидкості, визначення, здійснення, залежності, спосіб, розповсюдження, коливань, акустичних, інтенсивності, пристрій
Формула / Реферат:
1. Спосіб визначення залежності швидкості розповсюдження акустичних коливань від їх інтенсивності, який полягає в тому, що генерують електричні коливання, формують з них пакети електричних зондуючих коливань, які перетворюють в пакети акустичних зондуючих коливань. що випромінюють в досліджуване середовище, приймають пакети акустичних зондуючих коливань, що пройшли середовище, та перетворюють їх в пакети прийнятих електричних зондуючих...
Спосіб визначення швидкості розповсюдження акустичних коливань і пристрій для його здійснення
Номер патенту: 34508
Опубліковано: 15.03.2001
Автори: Здоренко Валерій Георгійович, Іващенко Григорій Олексійович, Скрипник Юрій Олексійович
МПК: G01N 29/07, G01H 5/00, G01N 29/00
Мітки: здійснення, коливань, визначення, акустичних, спосіб, пристрій, швидкості, розповсюдження
Текст:
...підключений до входу фільтру нижніх частот і входу фільтру верхніх частот, вихід першого інтегратора з'єднаний з керувальним входом генератора високої частоти, а вихід другого інтегратора з'єднаний з керувальним входом двофазного генератора низької частоти, один з виходів якого з'єднаний з одним входом цифрового частотоміра, інший вхід якого з'єднаний з виходом генератора високої частоти, а керувальні входи чотирьох автоматичних...
Попередній патент: Кристалізатор для безперервного розливу сталі
Наступний патент: Бічна стіна відкритого вагона-хопера
Випадковий патент: Система підґрунтового зрошення