Спосіб визначення швидкості розповсюдження акустичних коливань і пристрій для його здійснення
Номер патенту: 34508
Опубліковано: 15.03.2001
Автори: Скрипник Юрій Олексійович, Іващенко Григорій Олексійович, Здоренко Валерій Георгійович

Текст
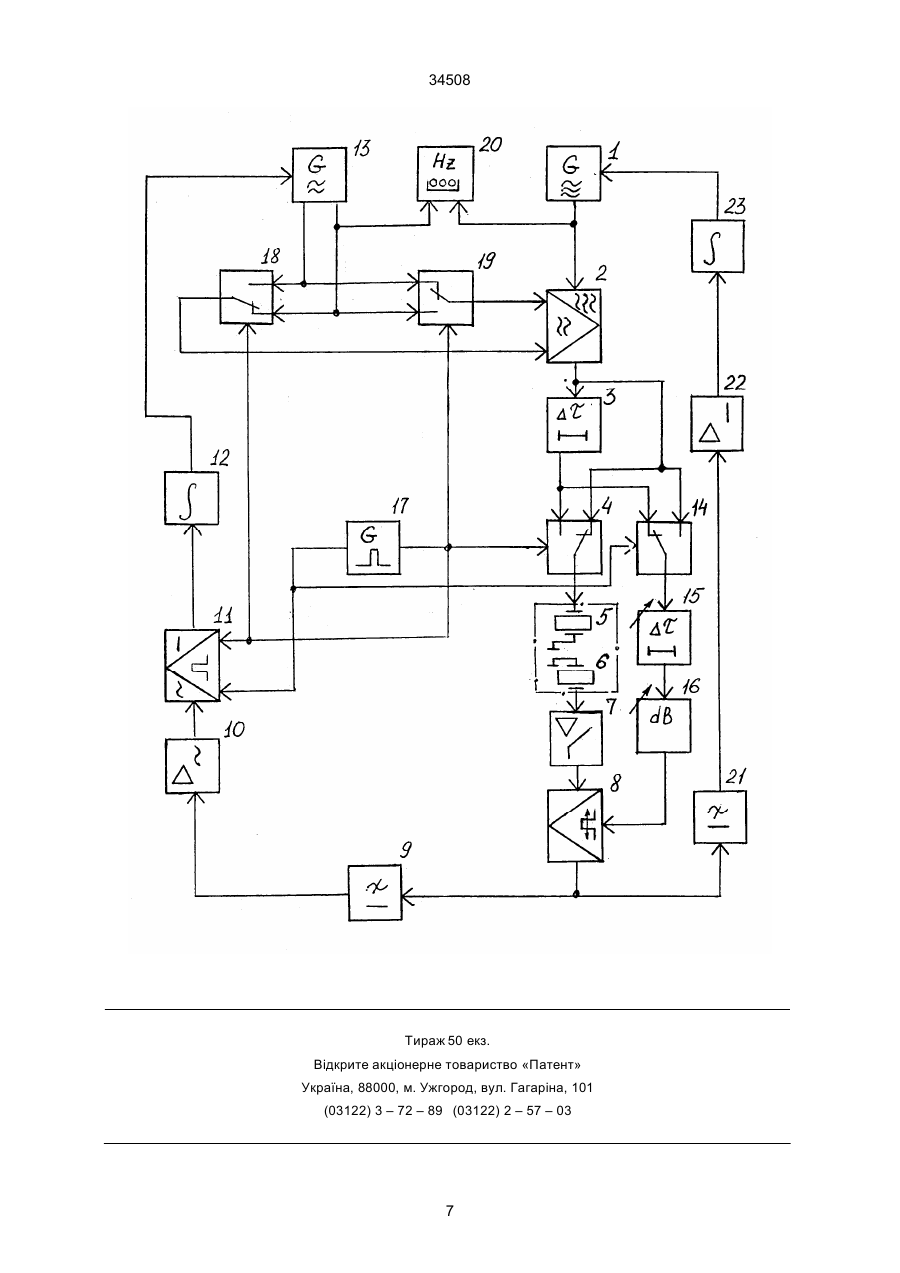
1. Спосіб визначення швидкості розповсюдження акустичних коливань, за яким збуджують електричні коливання, утворюють електричні коливання послідовно на двох частотах, поділяють їх на кожній з частот на опорні та зондуючі, здійснюють часову затримку електричних коливань на фіксований проміжок часу, перетворюють зондуючі електричні коливання в акустичні коливання, випромінюють акустичні зондуючі коливання в середовище, що досліджується, приймають акустичні зондуючі коливання, що пройшли контрольоване середовище, і перетворюють їх в електричні зондуючі коливання, вимірюють фазовий зсув між опорними і прийнятими зондуючими електричними коливаннями і визначають швидкість розповсюдження акустичних коливань за формулою, який відрізняється тим, що збуджують електричні коливання низької F1 і високої f1 частот, електричні коливання послідовно на двох частотах утворюють зсувoм високочастотних електричних коливань частоти f1 на значення низької частоти F1 у напрямку зменшення частоти f1 - F1 і у напрямку збільшення частоти f1 + F1, часову затримку здійснюють на час Dt послідовно зондуючих коливань, при цьому вимірюють фазовий зсув j1, і опорних коливань, при цьому вимірюють фазовий зсув j2, порівнюють виміряні фазові зсуви j1 і j2, потім змінюють частоту високочастотних коливань до значення f2, при якому досягається рівність абсолютних значень j1 і j2, змінюють частоту зсуву F1 до значення F2, при якому досягаються нульові значення цих фазових зсувів, вимірюють відношення частоти зсуву F2 до значення частоти високочастотних коливань f2, а швидкість розповсюдження акустичних коливань Сx визначають за формулою 34508 Винахід відноситься до акустичних вимірів і може бути використаний при контролі складу речовин і матеріалів по швидкості розповсюдження акустичних коливань. Відомий спосіб визначення швидкості розповсюдження акустичних коливань [наприклад, Бражников Н.И. Ультразвуковая фазометрия. М.: Энергия, 1968, с. 102], оснований на вимірі зсуву фаз електричних коливань між випромінювачем та приймачем акустичних коливань, розташованими на заданій відстані друг від друга. Спосіб може бути застосовано лише для вузького діапазону зміни швидкостей розповсюдження акустичних коливань, що вимірюються в досліджуємому середовищі, і точність вимірів різко знижується навіть при незначному розширенні діапазону зміни швидкостей. Це пов'язане з тим, що з'являється неоднозначність виміру зсуву фаз між випромінюваними та прийнятими коливаннями. Так, наприклад, при відстані між випромінювачем та приймачем (акустичній базі) l =60 мм, частоті коливань f =1 МГц і зміні швидкості акустичних коливань від 200 до 1300 м/с зсув фаз змінюється від » 300 • 2p до » 50 • 2p (радіан). При розширенні діапазону швидкостей до 4500 м/с (тверді тіла) число фазових циклів в 2p зросте, і фазова неоднозначність збільшиться. Відомий спосіб визначення швидкості розповсюдження акустичних коливань [а.с. СРСР № 785656, МКВ G 01 Н 5/00, 1977, Б. В. , №45, 1980], оснований на вимірі зсуву фаз електричних коливань між випромінювачем і основним та додатковим приймачами, розташованими на заданій відстані друг від друга, при цьому вимірюють зсув фаз між приймачами, один з яких розташований від випромінювача на відстані, відміннiй від заданoї, і по отриманому значенню зсуву фаз між одним з приймачів і випромінювачем визначають швидкість розповсюдження акустичних коливань. Для усунення фазової неоднозначності вимірюють зсув фаз між основним і додатковим приймачами, розташованими так, що різниця відстаней від приймачів до випромінювача утворить ще одну акустичну базу Dl = Відомий також спосіб визначення швидкості розповсюдження акустичних коливань [а.с. СРСР №1381343, МКВ G 01 Н 5/00, 1986, Б. В. , №10, 1988], який полягає в тому, що збуджують електричні коливання, утворюють електричні коливання послідовно на двох частотах, поділяють їх на кожній з частот на опорні і зондуючі, здійснюють часову затримку електричних коливань на фіксований проміжок часу, перетворюють зондуючі електричні коливання в акустичні коливання, випромінюють акустичні зондуючі коливання в середовище, що досліджується, приймають акустичні зондуючі коливання, що пройшли контрольоване середовище, і перетворюють їх в електричні зондуючі коливання, вимірюють зсув фаз між опорними і прийнятими зондуючими електричними коливаннями і визначають швидкість розповсюдження акустичних коливань по формулі. При цьому вимірюють на кожній з частот фазові зсуви j1 і j2 фаз між опорними і зондуючими коливаннями, здійснюють часову затримку зондуючих коливань на проміжок часу Dt, вимірюють зсув фаз j3 і j4, між опорними і затриманими зондуючими коливаннями відповідно на частотах f1 і f2, а швидкість розповсюдження акустичних коливань визначають по формулі ö l æ j - j3 ÷ Cx = ç 4 ç j - j - 1÷ Dt , 2 ø è 1 де l - акустична база вимірів. Однак і цей спосіб не забезпечує високої точності, бо, при визначенні швидкості розповсюдження акустичних коливань в широкому діапазоні значень дискретна зміна частоти може викликати зміну зсуву фаз на величину, більшу 2p, що призведе до переходу до іншого фазового циклу і, таким чином, до неоднозначності фазових вимірів. Відомий пристрій для визначення швидкості розповсюдження акустичних коливань (див. Маєвський С. М. Спосіб контролю залишкової міцності шляхом визначення швидкості розповсюдження ультразвуку. Матеріали другої Української науково-технічної конференції «Неруйнівний контроль та технічна діагностика», 12-16 травня 1997 p., м. Дніпропетровськ, стор. 30-34), що містить високочастотний генератор змінної частоти, послідовно з'єднані фазообертач на 180°, фазообертач на 90°, перший фазовий детектор, перший піковий детектор і перший аналого-цифровий перетворювач (АЦП), послідовно з'єднані ключ, обмежувач амплітуди, підсилювач, другий фазовий детектор, другий піковий детектор і другий АЦП, а також ультразвуковий перетворювач, з'єднаний з виходом ключа, при цьому виходи першого і другого АЦП з'єднані з входами мікропроцесора, вихід високочастотного генератора змінної частоти з'єднаний з входами ключа і фазообертача на 180°, а другий вхід другого фазового детектора з'єднаний з виходом фазообертача на 180°. Пристрою властива складність апаратурної реалізації та можливість виникнення значної похибки визначення швидкості розповсюдження акустичних коливань, зумовленої неідентичністю характеристик фазових детекторів, пікових детекторів, а також можливим переходом до сусіднього Cmax × Cmin , f (Cmax - Cmin ) де Сmin і Сmax - відповідно мінімальна і максимальна швидкості розповсюдження акустичних коливань. Наприклад, при зміні швидкості акустичних коливань від 200 до 1300 м/с при частоті f =1 МГЦ акустична база Dl =0,29 мм. Способу притаманні невисока точність визначення швидкості і значні витрати часу. Це пояснюється тим, що важко забезпечити постійність настільки малого значення Dl, особливо в виробничих умовах. Крім цього, згідно з цим способом, спочатку необхідно зробити грубе визначення швидкості Сх, по якому знаходять діапазон і відповідне цьому діапазону ціле число n фазових циклів в 2p. Після цього по знайденому числу фазових циклів і визначеному значенню фазового зсуву останнього циклу визначають точне значення швидкості Сх0. 2 34508 фазового циклу при вимірі фазового зсуву на другій частоті. Відомий також пристрій для визначення швидкості розповсюдження акустичних коливань по а. с. СРСР №1381343, МКВ G 01 Н 5/00, 1986, що містить генератор змінної частоти, блок фіксованої затримки, послідовно електроакустично з'єднані випромінювач і приймач акустичних коливань, підсилювач високої частоти і фазовий детектор, послідовно з'єднані блок регульованої затримки і атенюатор, які підключені до другого входу фазового детектора, і цифровой частотомір. Крім того, пристрій містить аналого-цифровий перетворювач, мікро-ЕОМ і ключ, включений паралельно блоку фіксованої затримки, керувальний вхід ключа підключено до мікро-ЕОМ, регулюючий вхід генератора змінної частоти і цифровой індикатор підключені до мікро-ЕОМ, вихід генератора змінної частоти з'єднаний з блоками фіксованої і регульованої затримок, вихід фазового детектора підключений до входу аналого-цифрового перетворювача, вихід котрого підключений до мікро-ЕОМ. Однак відомий пристрій не забезпечує високої точності визначення швидкості розповсюдження акустичних коливань в різноманітних середовищах. Це пояснюється відносно низькою точністю виміру фазових зсувів, що змінюються в широкому діапазоні значень при амплітудах і частотах зондуючих і опорних коливань, що також змінюються у досить широкому діапазоні. Необхідність кодування фазових зсувів, що вимірюються, і управління структурою вимірювальної схеми за допомогою мікро-ЕОМ призводить до певної апаратурної складності в реалізації відомого пристрою. В основу винаходу покладена задача створити такі спосіб та пристрій для визначення швидкості розповсюдження акустичних коливань, у яких введення нових операцій і нового співвідношення для визначення швидкості розповсюдження акустичних коливань в способі, введення нових елементів в їхньому зв'язку між собою і відомими в пристрої дозволив би підвищити точність визначення швидкості розповсюдження акустичних коливань за рахунок виключення неоднозначності фазових вимірів і спростити апаратурну реалізацію за рахунок виміру частоти електронними частотомірами замість виміру фазових зсувів електронними фазометрами, які мають меншу точність вимірів. Поставлена задача вирішується тим, що в способі визначення швидкості розповсюдження акустичних коливань, який полягає в тому, що збуджують електричні коливання, утворюють електричні коливання послідовно на двох частотах, поділяють їх на кожній з частот на опорні та зондуючі, здійснюють часову затримку електричних коливань на фіксований проміжок часу, перетворюють зондуючі електричні коливання в акустичні коливання, випромінюють акустичні зондуючі коливання в середовище, що досліджується, приймають акустичні зондуючі коливання, що пройшли контрольоване середовище, і перетворюють їх в електричні зондуючі коливання, вимірюють фазовий зсув між опорними і прийнятими зондуючими електричними коливаннями і визначають швидкість розповсюдження акустичних коливань по формулі, згідно з винаходом, збуджують електричні коливання низької F1 і високої f1 частот, електричні коливання послідовно на двох частотах утворюють зсувoм високочастотних електричних коливань частоти f1 на значення низької частоти F1 у напрямку зменшення частоти f1 - F1 і у напрямку збільшення частоти f1 + F1, часову затримку здійснюють на час Dt, послідовно зондуючих коливань, при цьому вимірюють фазовий зсув j1, і опорних коливань, при цьому вимірюють фазовий зсув j2, порівнюють виміряні фазові зсуви j1 і j2, потім змінюють частоту високочастотних коливань до значення f2, при якому досягається рівнiсть абсолютних значень j1 і j2, змінюють частоту зсуву F1 до значення F2, при якому досягаються нульові значення цих фазових зсувів, вимірюють відношення частоти зсуву F2 до значення частоти високочастотних коливань f2, а швидкість розповсюдження акустичних коливань Сx визначають по формулі Cx = F2 l × f2 Dt де l - акустична база вимірів. Поставлена задача вирішується також тим, що в пристрої для визначення швидкості розповсюдження акустичних коливань, що містить генератор високої частоти, блок фіксованої затримки, послідовно електроакустичнo з'єднані випромінювач і приймач акустичних коливань, підсилювач високої частоти і фазовий детектор, послідовно з'єднані блок регульованої затримки і атенюатор, підключені до другого входу фазового детектора, і цифровий частотомір, згідно з винаходом в нього введені фазокомпенсаційний односмуговий модулятор, двофазний генератор низької частоти, послідовно з'єднані фільтр нижніх частот, підсилювач постійної напруги і перший інтегратор, послідовно з'єднані фільтр верхніх частот, підсилювач змінної напруги, фазочутливий випрямляч і другий інтегратор, мультивібратор і чотири автоматичних перемикача, при цьому протилежні входи першого і другого перемикачів з'єднані між собою і підключені до виходу і входу блоку фіксованої затримки, вихід першого перемикача з'єднаний з входом випромінювача акустичних коливань, вихід другого перемикача з'єднаний з входом блоку регульованої затримки, протилежні входи третього і четвертого перемикачів з'єднані між собою і підключені до виходів двофазного генератора низької частоти, виходи цих перемикачів з'єднані з керувальними входами односмугового модулятора, включеного між виходом генератора високої частоти і входом блоку фіксованої затримки, вихід фазового детектора підключений до входу фільтру нижніх частот і входу фільтру верхніх частот, вихід першого інтегратора з'єднаний з керувальним входом генератора високої частоти, а вихід другого інтегратора з'єднаний з керувальним входом двофазного генератора низької частоти, один з виходів якого з'єднаний з одним входом цифрового частотоміра, інший вхід якого з'єднаний з виходом генератора високої частоти, а керувальні входи чотирьох автоматичних перемикачів з'єднані з виходами мультивібратора і керувальними входами фазочутливого випрямляча. 3 34508 автоматичних перемикачів 18 і 19 з'єднані між собою і підключені відповідно до виходів двофазного генератора 13 низької частоти, а їхні виходи з'єднані з керувальними входами односмугового модулятора 2. До виходу фазового детектора 8 підключені також послідовно з'єднані фільтр нижніх частот 21, підсилювач 22 постійної напруги і перший інтегратор 23, вихід якого з'єднаний з керувальним входом генератора 1 високої частоти. Запропонований спосіб визначення швидкості розповсюдження акустичних коливань здійснюють наступним чином. Збуджують електричні коливання високої частоти f1 і коливання низької частоти F1. Зсувають по частоті високочастотні коливання на значення низької частоти F1 в напрямку зменшення частоти f1-F1. Розділяють зсунуті по частоті коливання на зондуючі та опорні. Зондуючі коливання спочатку затримують на фіксований проміжок часу Dt і перетворюють зондуючі електричні коливання в акустичні, що випромінюють в середовище, що досліджується. Приймають акустичні коливання, що пройшли середовище, і перетворюють їх в електричні зондуючі коливання. Відстань l між випромінювачем та приймачем зондуючих коливань вибирають виходячи з необхідності отримання мінімальних вторинних відбиттів і допустимого рівня прийнятого сигналу. Вимірюють фазовий зсув між опорними і затриманими зондуючими коливаннями. При зміні зсуву фаз між випромінюваними і прийнятими коливаннями на акустичній базі l з зміною швидкості акустичних коливань у діапазоні від Сmin до Сmax виникає неоднозначність визначення зсуву фаз. Це пов'язане з тим, що на базі l укладається більше одної довжини акустичної хвилі, тобто виникає фазовий зсув, більший 2p. При означеній затримці зондуючих високочастотних електричних коливань їхню частоту зсувають в напрямку їхнього зменшення (f1 - F1). При цьому повний фазовий зсув F1 між опорними і зондуючими коливаннями при швидкості розповсюдження акустичних коливань в досліджуємому середовищі Сx Введення в спосіб, що пропонується, операцій збудження низькочастотних електричних коливань частоти F1, зсуву високочастотних електричних коливань частоти f1 на значення низької частоти F1, в напрямку зменшення до значення f1 F1, виміру фазового зсуву при затримці зондуючих коливань на час Dt, наступній затримці тільки опорних коливань на той самий час Dt і зміні направлення зсуву частоти високочастотних коливань в напрямку збільшення до значення f1 +F1, вимірі при цьому значенні частоти фазового зсуву j2, порівняння фазових зсувів j1 і j2, зміні частоти високочастотних коливань до значення f2, при якому досягається рівнiсть абсолютних значень фазових зсувів j1 і j2, зміні значення низької частоти до значення F2, при якому досягаються нульові значення фазових зсувів j1 і j2, виміру відношення частот F2 і f2 дозволяють підвищити точність визначення швидкості розповсюдження акустичних коливань за рахунок виключення неоднозначності фазових вимірів (фазові зсуви j1 і j2 знаходяться в межах одного фазового циклу від -p до +p). При цьому швидкість розповсюдження акустичних коливань визначається по новому співвідношенню Cx = F2 l , × f2 Dt де l - акустична база вимірів. Введення в запропонований пристрій нових елементів з відповідними зв'язками дозволяє підвищити точність визначення швидкості розповсюдження акустичних коливань за рахунок виключення неоднозначності фазових вимірів, виключення нестабільності і нелінійності характеристик фазового детектора на результат вимірів, а також дозволяє спростити та здешевити апаратурну реалізацію пристрою за рахунок виключення ЕОМ і використання стандартних цифрових частотомірів для виміру відношення частот F2 і f2. На кресленні подана функціональна схема пристрою, що реалізує запропонований спосіб визначення швидкості розповсюдження акустичних коливань. Пристрій для визначення швидкості розповсюдження акустичних коливань містить генератор високої частоти 1, послідовно електричнo з'єднані односмуговий фазокомпенсаційний модулятор 2, блок 3 фіксованої затримки, перший автоматичний перемикач 4, акустичні випромінювач 5 і приймач 6, підсилювач високої частоти 7, фазовий детектор 8, фільтр верхніх частот 9, підсилювач 10 змінної напруги, фазочутливий випрямляч 11, другий інтегратор 12 і регульований по частоті двофазний генератор низької частоти 13, послідовно з'єднані другий автоматичний перемикач 14, блок 15 регульованої затримки і атенюатор 16, підключені до другого входу фазового детектора 8, мультивібратор 17, третій та четвертий автоматичні перемикачі 18 і 19, керувальні входи яких з'єднані з керувальними входами автоматичних перемикачів 4 і 14 та підключені до виходу мультивібратора 17, і цифровий частотомір 20, один вхід якого з'єднаний з виходом генератора 1 високої частоти, другий вхід з'єднаний з одним з виходів двофазного генератора 13 низької частоти. Протилежні входи ö æ l ÷ F1 = 2p( f1 - F1)ç ç C + Dt ÷ = 2p × n + j1 , ø è x (1) де n - ціле число фазових циклів в 2p (ціла частина відношення акустичної бази до довжини ультразвукової хвилі l); j1 - дробова частина повного фазового зсуву F1 в радіанах. Вимірюють j1 - дробову частину повного фазового зсуву F1. Величину затримки коливань Dt вибирають такою, щоб внесений нею додатковий Dj фазовий зсув задовольняв умові Dj = 2pf1Dt < p , (2) тобто не перевищував би половину фазового циклу в радіанах. Після цього здійснюють часову затримку тільки опорних коливань на той же проміжок часу Dt і змінюють напрямок зсуву частоти на про 4 34508 тилежний (f1 + F1). Повний фазовий зсув F2 між опорними і зондуючими коливаннями приймає значення ö æ l ÷ F 2 = 2p( f1 + F1 )ç ç C - Dt ÷ = 2 p × n + j 2 , ø è x Величину затримки Dt можна визначити з співвідношення (2), якщо задатись значенням додаткового фазового зсуву від цієї затримки, кратним порогу чутливості фазових вимірів (3) Dj < Dj = 2pf2Dt
1. Діапазон змін низької частоти F2 визначається діапазоном зміни швидкості акустичних коливань. З співвідношення (6) слідує, що частота, що зсуває F2 = 100 × 10 -3 Fmin = Вирішуючи рівняння (5) відносно швидкості розповсюдження акустичних коливань Сx, одержуємо Cx = (9) При зміні швидкості розповсюдження акустичних коливань від 200 до 1300 м/с і акустичній базі l = 60 мм частота зсуваючих коливань згідно з (7) змінюється від мінімального значення (4) Далі змінюють частоту F1 низькочастотного зсуву до значення F2, при якому зникає дробова частина повних фазових зсувів F1 і F2. При досягненні рівності повних фазових зсувів (j = 0) вимірюють відношення частоти зсуву F 2 до частоти f 2 високочастотних коливань, по якому визначають швидкість розповсюдження акустичних коливань. Справді, з рівності повних фазових зсувів (1) і (3) слідує, що (f2 - F2 )ç ç K × Dt . 2 p × f2 Враховуючи, що порогова чутливість електронних фазометрів складає 10-3...10-4 радіан, то при виборі частоти високочастотних коливань f2 = 1 Мгц, коефіцієнті K = 100 час затримки Dt згідно з (9) приймає значення F1 = 2pn + j; F2 = 2pn - j. (8) (7) 5 34508 ня фаз низькочастотних модулюючих коливань. При одному положенні перемикачів 18 і 19 встановлюється таке направлення чередування фаз квадратурних сигналів низької частоти, при якому частота зсунутих коливань зменшується, а при іншому, протилежному, положенні перемикачів 18 і 19 частота зсунутих коливань зростає. В результаті цього частота високочастотних коливань на виході односмугового модулятора періодично з частотою комутації збільшується або зменшується в залежності від положення цих перемикачів, зберігаючи одну і ту ж амплітуду зсовуваних по частоті коливань. При положенні перемикачів 4 і 14, при якому фіксована затримка блоку 3 включена послідовно з електроакустичним трактом 5-6 положення перемикачів 18 і 19 забезпечує зменшення частоти високочастотних коливань на вході цього тракта. Коли перемикачі 4 і 14,18 і 19 займають протилежне положення, фіксована затримка блоку З включається паралельно електроакустичному тракту, який містить перетворювачі 5 і 6, а частота високочастотних коливань на виході односмугового модулятора збільшується. У фазовому детекторі 8 відбувається порівняння фаз прийнятих і посилених зондуючих коливань, що пройшли електроакустичний тракт 5 - 6, з опорними коливаннями тієї же частоти, що проходять крізь блок 15 регульованої затримки і перемінний атенюатор 16. Регулюванням блоку 15 затримки і атенюатора 16 вирівнюють амплітуди і фазові затримки коливань на входах фазового детектора 8 в відсутності середовища, що досліджується, або при мінімальному значенні швидкості розповсюдження акустичних коливань у цьому середовищі. При цьому початкова частота генератора 13 встановлюється відповідної мінімальної швидкості розповсюдження акустичних коливань у відповідності з виразом (10). При введенні середовища, що досліджується, або зміні в ньому швидкості розповсюдження акустичних коливань порушується рівність фазових зсувів на входах фазового детектора 8 при двох положеннях автоматичних перемикачів 4 і 14,18 і 19. Фазовий детектор 8, виконаний, наприклад, по двополярній тригерній схемі, має лінійну дільницю в діапазоні від -p до +p (один фазовий цикл). Для забезпечення роботи фазового детектора 8 в межах одного фазового циклу при введенні затримки Dt, постійна складова його вихідної напруги, що виділяється за допомогою фільтру нижніх частот 21, посилюється підсилювачем 22 постійної напруги та надходить на вхід інтегратора 23, вихідна напруга якого впливає на керувальний вхід генератора 1. Під впливом керуючої напруги частота генератора 1 змінюється до досягнення рівності абсолютних значень фазових зсувів протилежної полярності на входах фазового детектора 8 при двох положеннях автоматичних переми качів 4 і 14, 18 і 19. При цьому зникає постійна складова напруги на виході фазового детектора 8 і інтегратор 23 підтримує відповідне значення частоти генератора 1. Так як фазові зсуви, що порівнюються, мають різні знаки, то на виході фазового детектора 8 з'являється і перемінна складова напруги частоти (що задається мультивібратором 17) комутації, з амплітудою, пропорційною різниці абсолютних значень фазових зсувів, що порівнюються. Ця напруга виділяється фільтром 9 верхніх частот, посилюється підсилювачем 10 змінної напруги і випрямляється фазочутливим випрямлячем 11, що керується безпосередньо прямокутною напругою, що формується мультивібратором 17. Випрямлена напруга заряджає інтегратор 12, вихідна напруга якого впливає на керуючий вхід двофазного генератора 13. Під впливом керувальної напруги частота генератора 13 збільшується до зникнення різниці фаз на входах фазового детектора 8 при двох положеннях автоматичних перемикачів. При цьому зникає перемінна складова напруги на виході фазового детектора 8 і відповідно випрямлена напруга на виході фазочутливого випрямляча 11. Подальший заряд інтегратора 12 припиняється, його вихідна напруга утримує значення низької частоти, відповідне умові (5) рівності повних фазових зсувів, які складаються з цілого числа фазових циклів на входах фазового детектора 8. Відповідне значення відношення частот генераторів 1 і 13 визначається за допомогою цифрового частотоміра, наприклад Ч3-65, працюючого в режимі виміру відношення частот двох коливань. Значення швидкості розповсюдження Сх можна безпосередньо визначати по індикатору частотоміра 20. У порівнянні з відомим, пристрій, що заявляється, забезпечує підвищення точності шляхом виключення впливу нелінійності і нестабільності перетворювальної характеристики фазового детектора на результат виміру і спрощення технічної реалізації за рахунок виключення ЕОМ з відповідними аналого-цифровими та цифроаналоговими перетворювачами з складу пристрою, а також виконавчими елементами, які керують роботою ключа, і використання стандартного цифрового частотоміра, що виконує вимірювальні і прості обчислювальні операції. Для оцінки метрологічних характеристик запропонованих способу та пристрою створено експериментальний зразок приладу для визначення швидкості розповсюдження акустичних коливань в деяких полімерних матеріалах (поліетилен, полівінілхлорид, капрон). Виміри проводились в діапазоні частот 0,5 - 2 МГц при частоті комутації 5 - 10 Гц. При цьому визначені за допомогою експериментального зразка приладу значення швидкості розповсюдження акустичних коливань в матеріалах, що досліджувались, відрізнялись від табличних не більш ніж на 0,1 – 0,5%. 6 34508 Тираж 50 екз. Відкрите акціонерне товариство «Патент» Україна, 88000, м. Ужгород, вул. Гагаріна, 101 (03122) 3 – 72 – 89 (03122) 2 – 57 – 03 7
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of rate of propagation of acoustic vibrations and appliance for its implementation
Автори англійськоюSkrypnyk Yurii Oleksiiovych, Zdorenko Valerii Heorhiiovych, Ivaschenko Hryhorii Oleksiiovych
Назва патенту російськоюСпособ определения скорости распространения акустических колебаний и устройство для его осуществления
Автори російськоюСкрипник Юрий Алексеевич, Здоренко Валерий Георгиевич, Иващенко Григорий Алексеевич
МПК / Мітки
МПК: G01N 29/07, G01N 29/00, G01H 5/00
Мітки: пристрій, розповсюдження, швидкості, визначення, спосіб, здійснення, коливань, акустичних
Код посилання
<a href="https://ua.patents.su/7-34508-sposib-viznachennya-shvidkosti-rozpovsyudzhennya-akustichnikh-kolivan-i-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення швидкості розповсюдження акустичних коливань і пристрій для його здійснення</a>
Спосіб визначення швидкості поширення акустичних коливань в нелінійних середовищах і пристрій для його здійснення
Номер патенту: 13404
Опубліковано: 16.12.1996
Автори: Лісовець Сергій Миколайович, Скрипник Юрій Олексійович, Здоренко Валерій Георгійович
МПК: G01H 5/00, G01N 29/48, G01N 29/00, G01N 29/07
Мітки: спосіб, нелінійних, швидкості, здійснення, коливань, визначення, акустичних, пристрій, поширення, середовищах
Формула / Реферат:
1. Способ определения скорости распространения акустических колебаний в нелинейных средах, заключающийся в том, что генерируют исходные электрические колебания, разделяют их па опорные и зондирующие колебания, преобразуют электрические зондирующие колебания в акустические зондирующие колебания и излучают их в исследуемую среду, принимают прошедшие ее акустические зондирующие колебания и преобразуют их в электрические зондирующие...
Пристрій для створення акустичних коливань
Номер патенту: 24321
Опубліковано: 17.07.1998
Автори: Климишин Ярослав Данилович, Кондрат Роман Михайлович, Кондрат Олександр Романович
МПК: E21B 43/00, G10K 7/00
Мітки: пристрій, створення, акустичних, коливань
Формула / Реферат:
Пристрій для створення акустичних коливань, що містить корпус прямокутного перерізу, всередині якого встановлений з можливістю коливань навколо вісі і з'єднаний з джерелом стиснутого газу (рідини) модулятор шириною, рівною ширині корпусу, який відрізняється тим, що модулятор виконаний Т-подібного профілю і встановлений на вісі загостреною частиною проти потоку, а розширені частини Т-подібного профілю виконані під кутом 90° до його центральної...
Спосіб визначення швидкості газового потоку і пристрій для його здійснення
Номер патенту: 21939
Опубліковано: 30.04.1998
Автори: Баришовець Віталій Леонідович, Шевченко Сергій Якович, Березовчук Олександр Іванович, Кузнецов Володимир Федорович
МПК: G01P 5/00
Мітки: визначення, здійснення, потоку, газового, спосіб, пристрій, швидкості
Формула / Реферат:
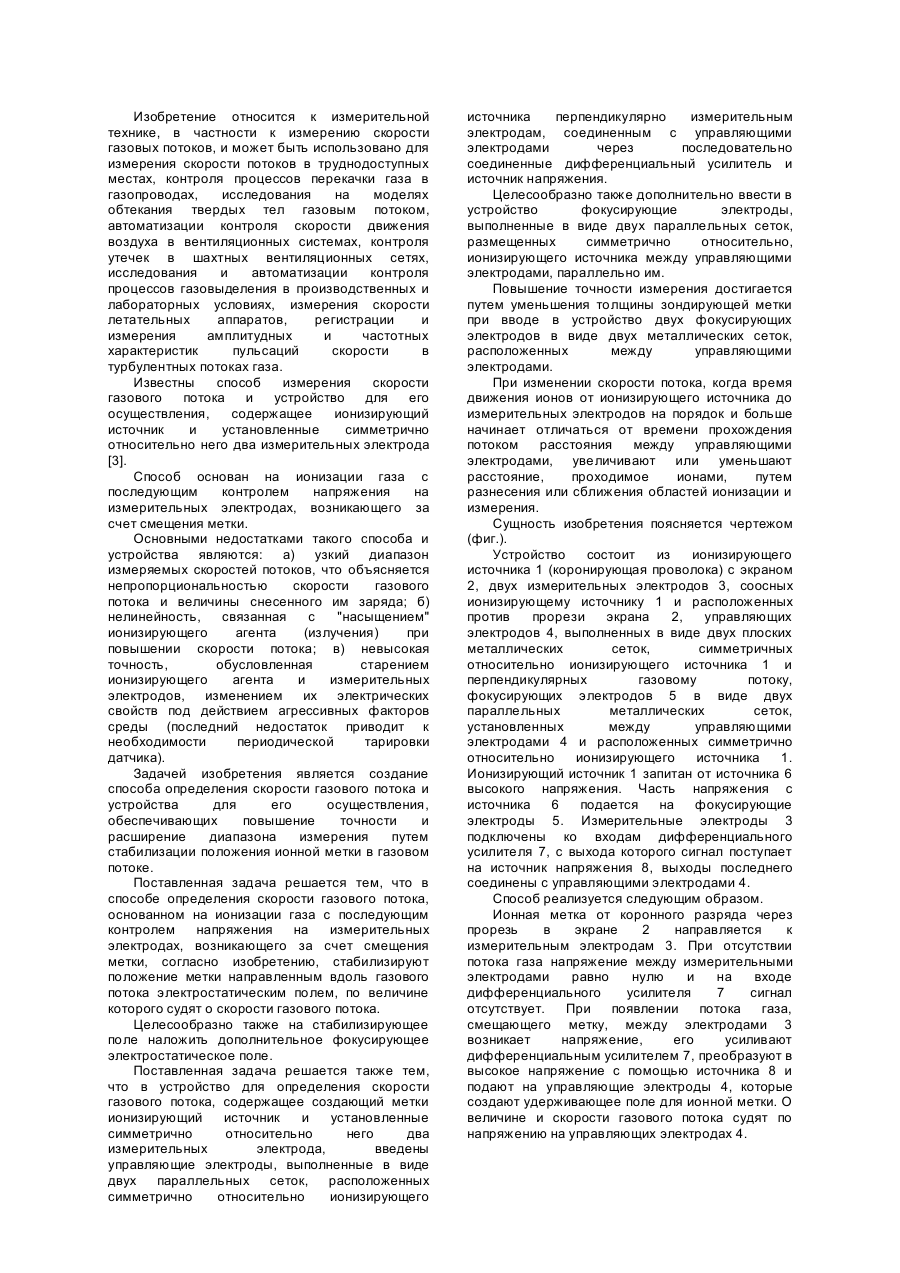
1. Способ определения скорости газового потока, включающий создание метки путем ионизации газа и контроль напряжения на измерительных электродах, отличающийся тем, что стабилизируют положение метки направленным вдоль газового потока электростатическим полем, по величине которого судят о скорости газового потока.2. Способ по п. 1, отличающийся тем, что на стабилизирующее поле накладывают фокусирующее электростатическое...
Пристрій для створення акустичних коливань
Номер патенту: 28804
Опубліковано: 16.10.2000
Автори: Кондрат Роман Михайлович, Климишин Ярослав Данилович, Кондрат Олександр Романович
МПК: B06B 1/20
Мітки: коливань, акустичних, створення, пристрій
Формула / Реферат:
1. Пристрій для створення акустичних коливань, що містить корпус, всередині якого встановлений з можливістю коливань навколо осі і з'єднаний з джерелом стиснутого газу /рідини/ модулятор висотою, рівною висоті прохідного отвору, який відрізняється тим, що модулятор виконаний V - подібного профілю і встановлений загостреною частиною в бік виходу газу /рідини/ на осі в отворі, виконаному на боковій стінці корпуса, а корпус обладнаний в нижній...
Спосіб виявлення та визначення електромагнітного випромінювання від біологічних об’єктів та пристрій для його здійснення
Номер патенту: 28128
Опубліковано: 16.10.2000
Автори: Яненко Олексій Пилипович, Скрипник Юрій Олексійович
МПК: G01N 33/483
Мітки: об'єктів, визначення, виявлення, спосіб, випромінювання, здійснення, пристрій, електромагнітного, біологічних
Формула / Реферат:
1. Спосіб виявлення та визначення електромагнітного випромінювання від біологічних об'єктів, при якому опромінюють зондуючим монохроматичним сигналом активні ділянки поверхні біооб'єкту, наприклад, біологічно активні точки шкіри людини або тварини, приймають відбитий сигнал, виділяють з нього сигнал вторинного випромінювання об'єкта на одній із комбінаційних частот, які виникають від змішування опромінюючого сигналу та гармонік сигналу...
Попередній патент: Ветеринарний препарат для профілактики і лікування захворювань крові “феровіт”
Наступний патент: Спосіб обробки газом розплаву металу
Випадковий патент: Спосіб диференційної діагностики функціональної і органічної обструкції мисково-сечовідного сегмента у дітей, хворих на гідронефроз