Спосіб жорсткої передачі зв’язку між системами зв’язку за участю мобільного абонента (варіанти)
Номер патенту: 45478
Опубліковано: 15.04.2002
Автори: Тідеманн Едвард Г., молодший, Чен Тао, Вітлі Чарльз Е. ІІІ
Формула / Реферат
1. Спосіб уникнення втрати зв'язку з мобільною станцією у безпровідній системі зв'язку у випадку, коли зазначена мобільна станція переходить з зони обслуговування первісної системи у зону обслуговування першої нової системи і робить спробу встановити зв'язок з зазначеною першою новою системою, яка виявляється безуспішною, який передбачає операції:
- спроба встановити зв'язок між зазначеною мобільною станцією і зазначеною першою новою системою,
- передача від зазначеної мобільної станції набору значень параметрів до зазначеної первісної системи у випадку, якщо спроба встановити зв'язок з зазначеною першою новою системою була невдалою,
- прийом зазначеною системою зазначених значень параметрів,
- формування у зазначеній первісній системі списку для пошуку інших нових систем згідно з зазначеними значеннями параметрів і
- спроба встановити зв'язок з одною з зазначених інших нових систем згідно з зазначеним списком для пошуку інших нових систем.
2. Спосіб за п. 1, який відрізняється тим, що додатково включає операцію вимірювання зазначених значень параметрів зазначеною мобільною станцією.
3. Спосіб за п. 2, який відрізняється тим, що зазначена операція вимірювання зазначених значень параметрів включає вимірювання енергії пілот-сигналів зазначеної нової системи.
4. Спосіб за п. 2, який відрізняється тим, що зазначена операція вимірювання зазначених значень параметрів виконується згідно з заздалегідь визначеним набором параметрів пошуку.
5. Спосіб за п. 4, який відрізняється тим, що зазначена первісна система передає зазначений заздалегідь визначений набір параметрів пошуку до зазначеної мобільної станції.
6. Спосіб за п. 2, який відрізняється тим, що операція вимірювання зазначених значень параметрів включає визначення, чи був перевищений мінімальний поріг потужності у зоні обслуговування першої нової системи.
7. Спосіб за п. 1, який відрізняється тим, що додатково передбачає передачу зазначеною первісною системою зазначеного списку для пошуку до зазначеної мобільної станції.
8. Спосіб передачі зв'язку від первісної системи до нової системи у безпровідній системі зв'язку у випадку, коли мобільна станція переходить з зони обслуговування зазначеної первісної системи у зону обслуговування зазначеної нової системи, який передбачає операції:
- прогнозний вибір первісною станцією перших нових систем,
- спроба мобільної станції встановити зв'язок з зазначеними першими новими системами,
- пошук альтернативних нових систем у випадку, якщо спроба встановити зв'язок з зазначеними першими новими системами не мала успіху,
- спроба встановити зв'язок мобільної станції з зазначеними альтернативними новими системами, обраними у результаті зазначеного пошуку альтернативних нових систем, і
- відновлення зв'язку з первісною системою у випадку, якщо спроба встановити зв'язок з зазначеними альтернативними новими системами не мала успіху.
9. Спосіб за п. 8, який відрізняється тим, що додатково передбачає вимірювання мобільною станцією мінімального первинного сигналу від зазначених перших нових системи.
10. Спосіб за п. 9, який відрізняється тим, що спроба встановити зв'язок з зазначеними першими новими системами базується на локалізації зазначеного мінімального первинного сигналу.
11. Спосіб за п. 9, який відрізняється тим, що зазначеним мінімальним первинним сигналом є пілот-сигнал.
12. Спосіб за п. 8, який відрізняється тим, що зазначений пошук альтернативних нових систем включає вимірювання мобільною станцією мінімального вторинного сигналу.
13. Спосіб за п. 12, який відрізняється тим, що спроба встановити зв'язок мобільної станції з зазначеними альтернативними новими системами базується на локалізації зазначеного мінімального вторинного сигналу.
14. Спосіб за п. 12, який відрізняється тим, що зазначене відновлення зв'язку з первісною системою є результатом того, що локалізація зазначеного мінімального вторинного сигналу була невдалою.
15. Спосіб за п. 12, який відрізняється тим, що зазначеним мінімальним вторинним сигналом є сигнал потужності.
16. Спосіб за п. 8, який відрізняється тим, що додатково передбачає прийом мобільною станцією списку для пошуку перших нових систем, складеного згідно з прогнозним вибором перших нових систем, виконаним первісною системою.
17. Спосіб за п. 8, який відрізняється тим, що додатково передбачає прийом мобільною станцією списку для пошуку других нових систем, складеного згідно з прогнозним вибором других нових систем, виконаним первісною системою.
Текст
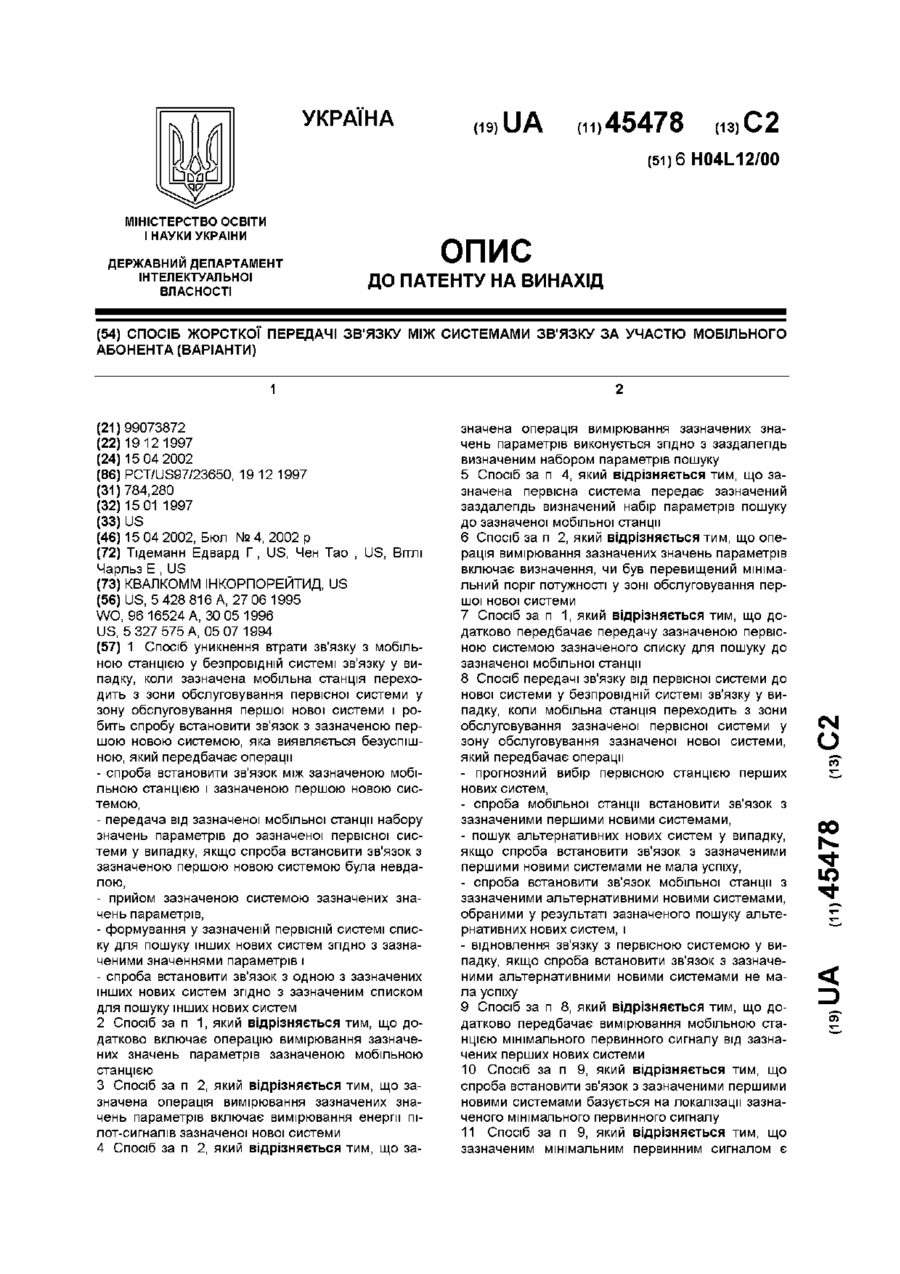
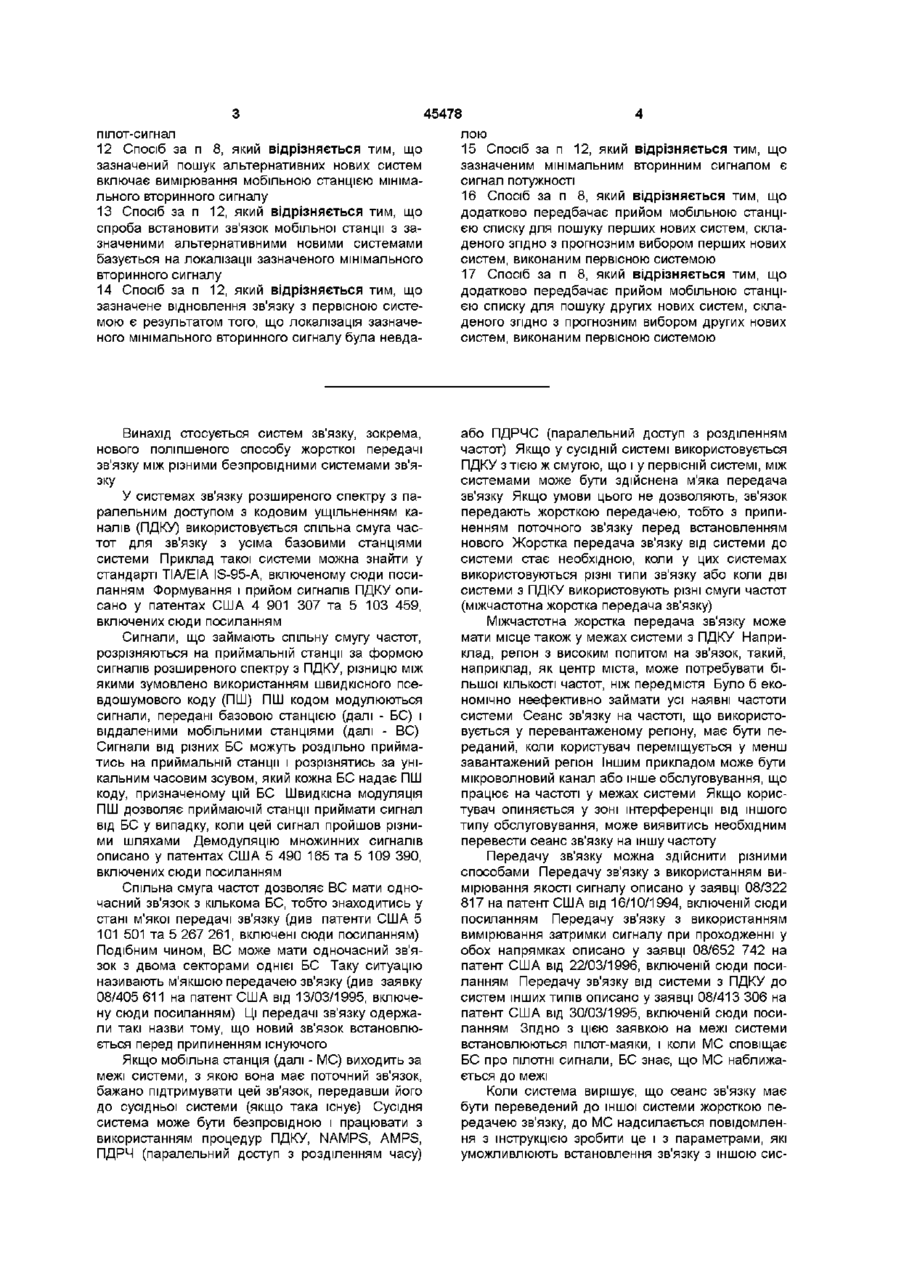
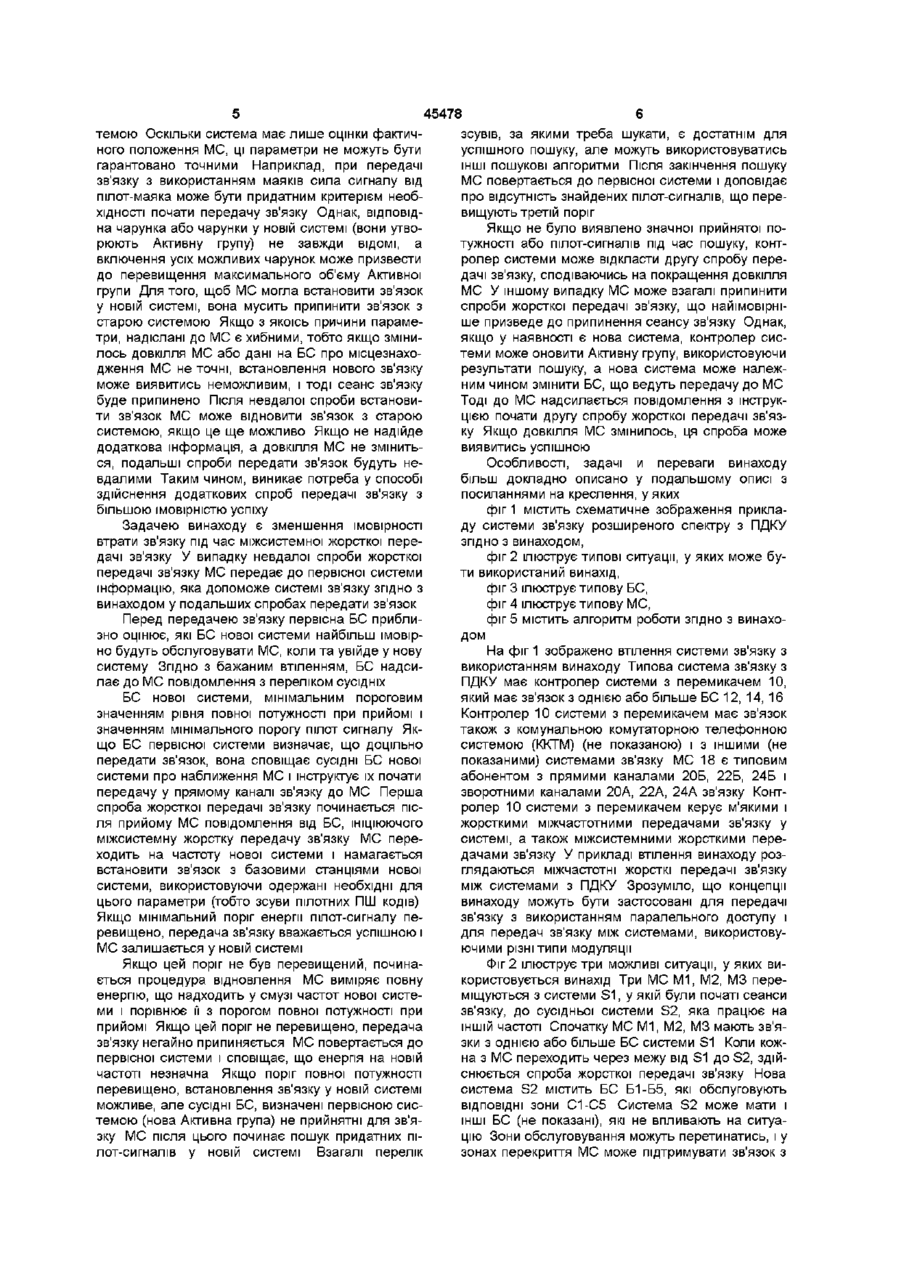
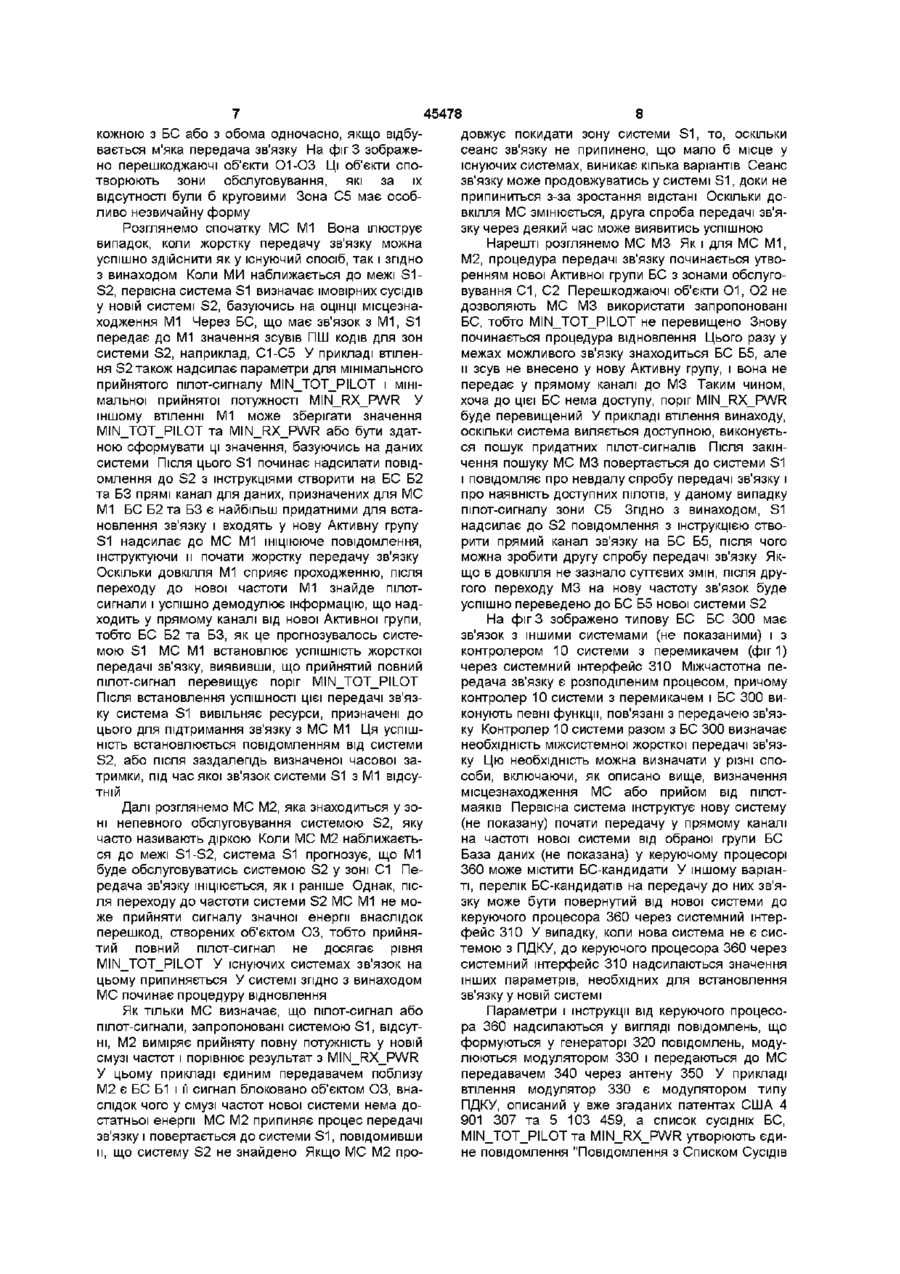
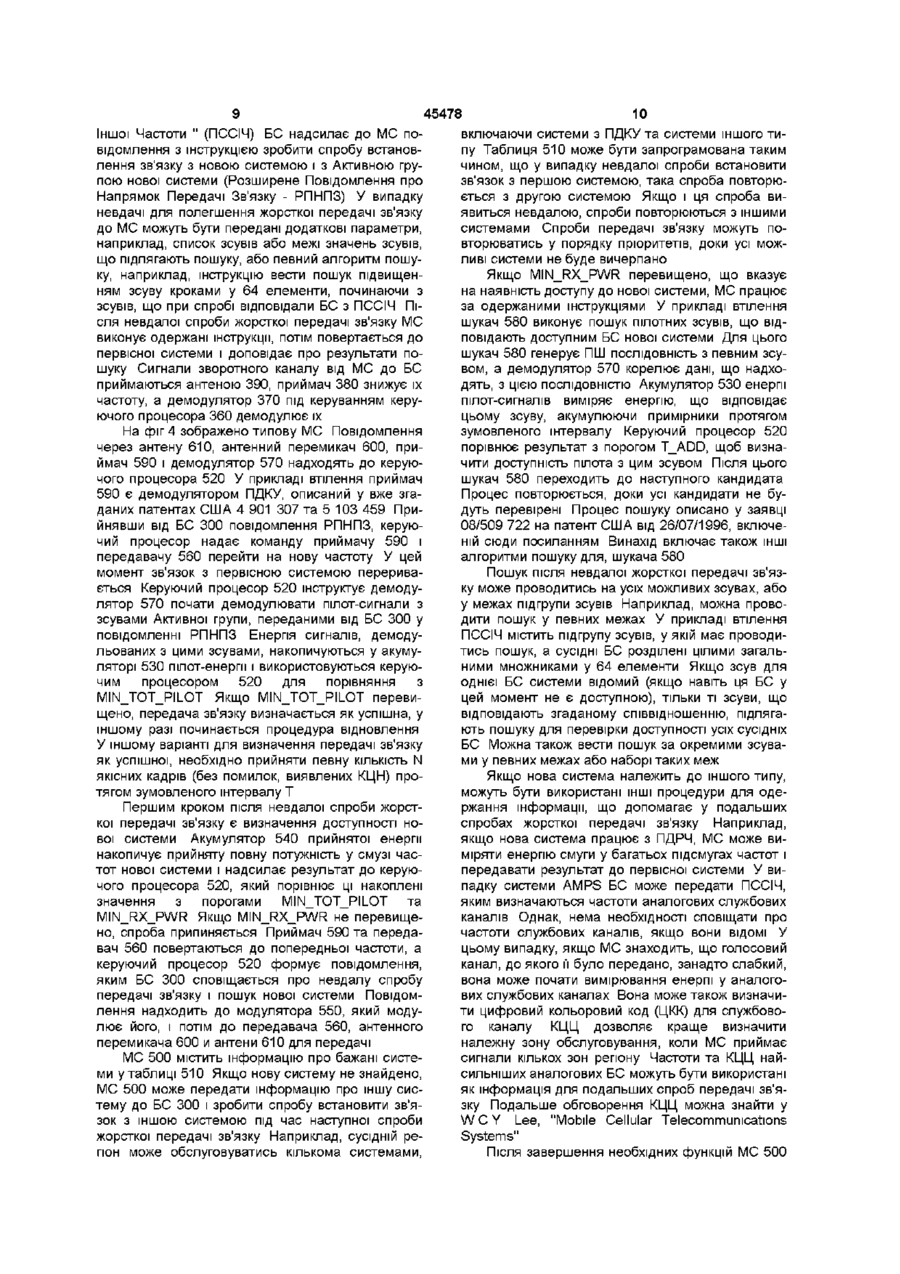
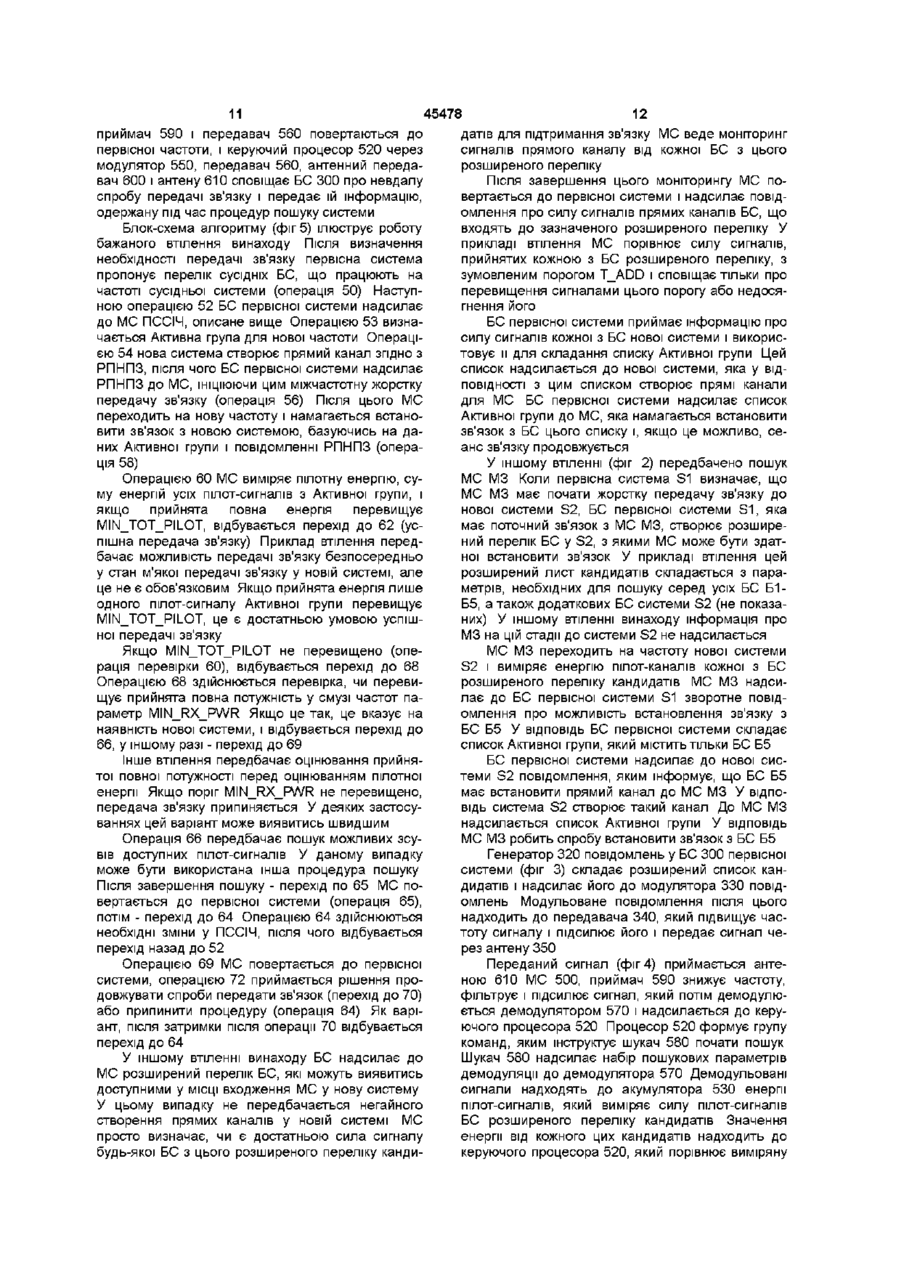
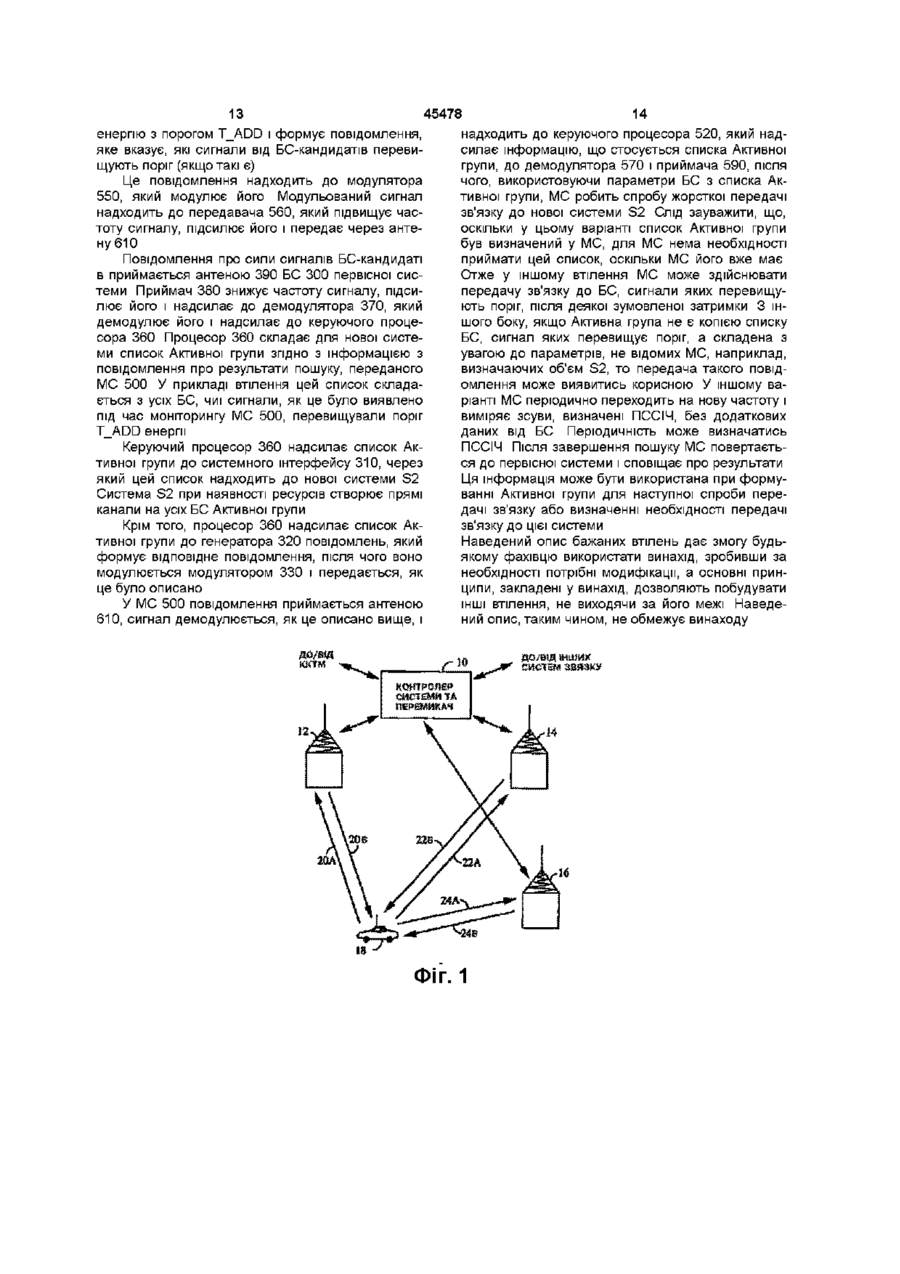
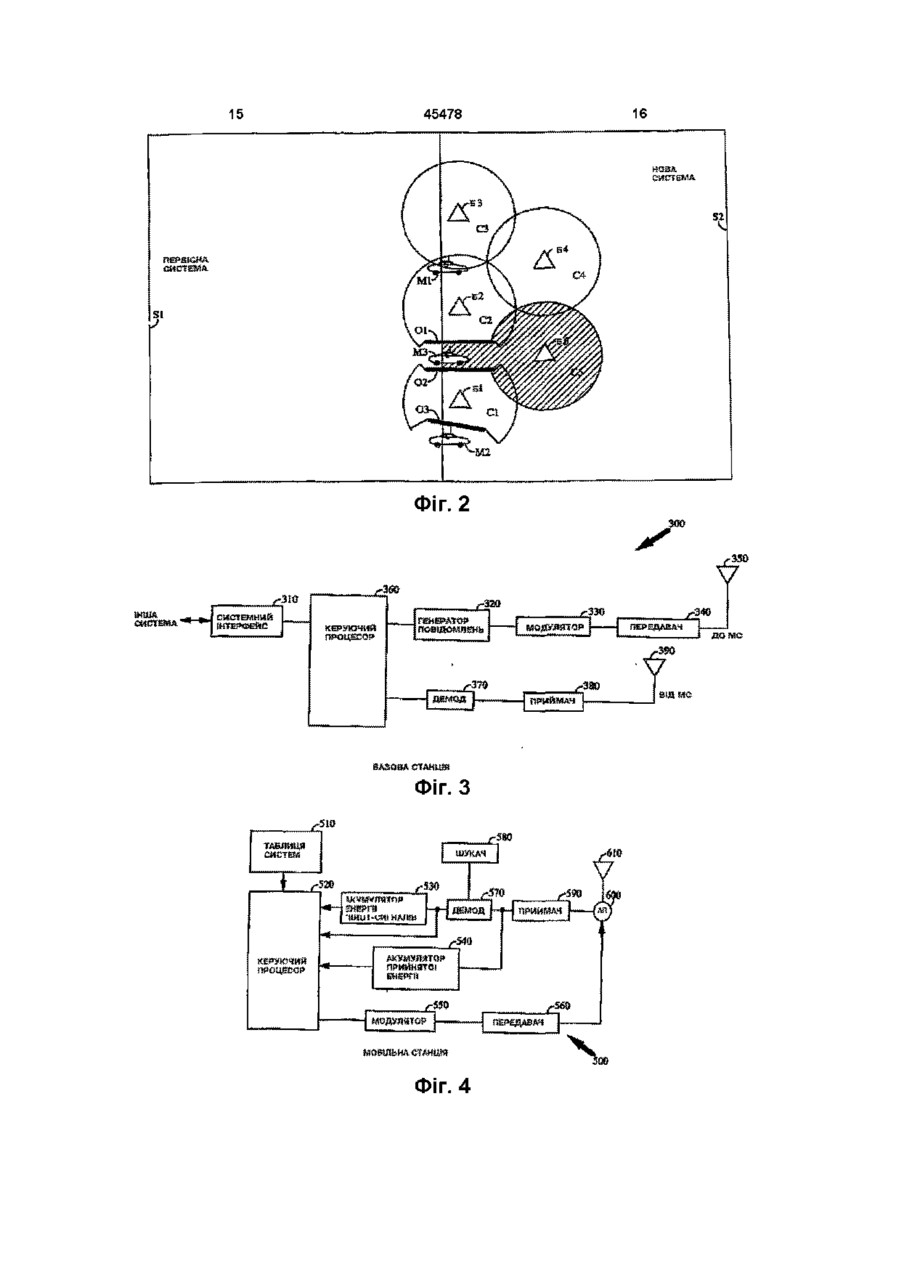
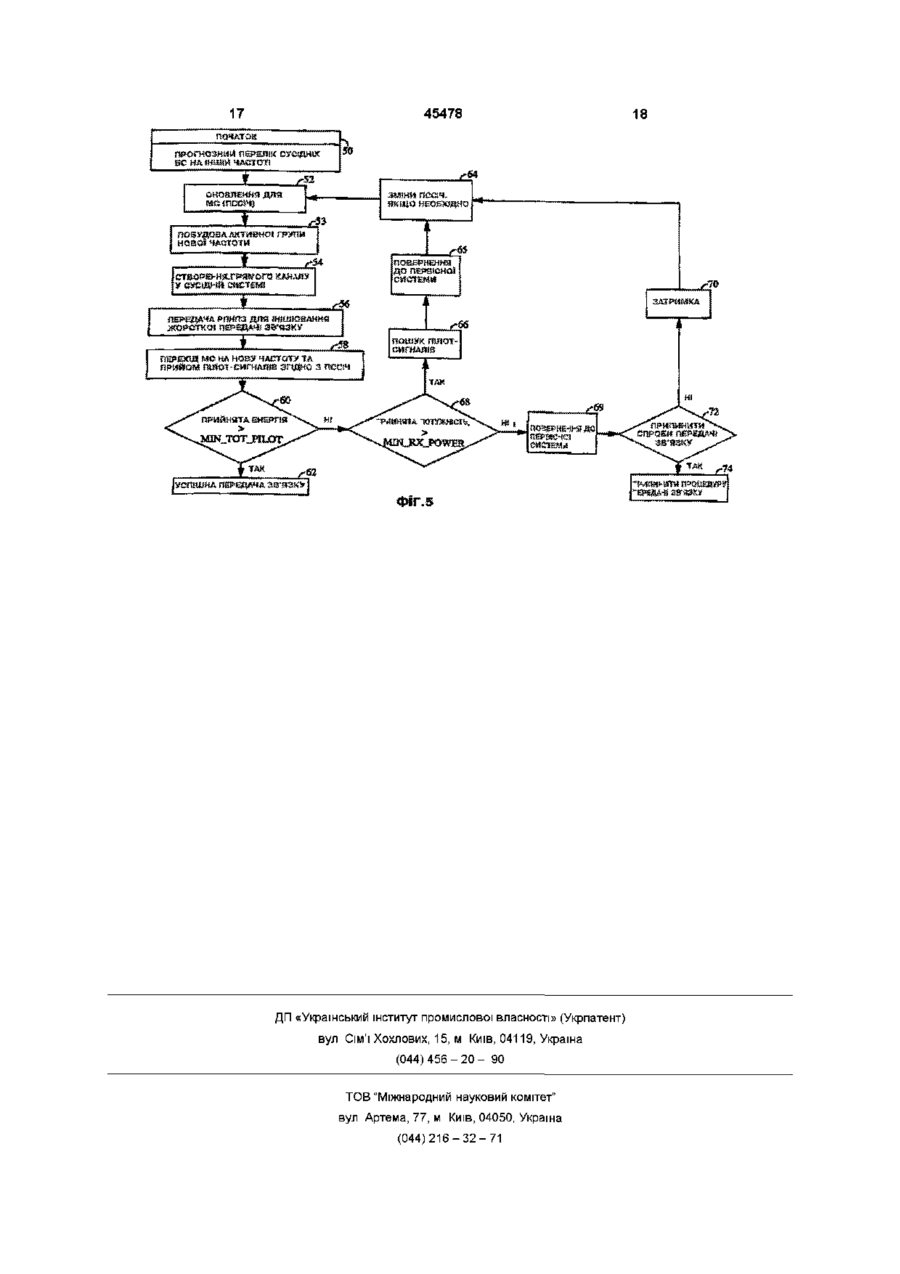
1 Спосіб уникнення втрати зв'язку з мобільною станцією у безпровідній системі зв'язку у випадку, коли зазначена мобільна станція переходить з зони обслуговування первісної системи у зону обслуговування першої нової системи і робить спробу встановити зв'язок з зазначеною першою новою системою, яка виявляється безуспішною, який передбачає операції - спроба встановити зв'язок між зазначеною мобільною станцією і зазначеною першою новою системою, - передача від зазначеної мобільної станції набору значень параметрів до зазначеної первісної системи у випадку, якщо спроба встановити зв'язок з зазначеною першою новою системою була невдалою, - прийом зазначеною системою зазначених значень параметрів, - формування у зазначеній первісній системі списку для пошуку інших нових систем згідно з зазначеними значеннями параметрів і - спроба встановити зв'язок з одною з зазначених інших нових систем згідно з зазначеним списком для пошуку інших нових систем 2 Спосіб за п 1, який відрізняється тим, що додатково включає операцію вимірювання зазначених значень параметрів зазначеною мобільною станцією 3 Спосіб за п 2, який відрізняється тим, що зазначена операція вимірювання зазначених значень параметрів включає вимірювання енергії пілот-сигналів зазначеної нової системи 4 Спосіб за п 2, який відрізняється тим, що за 2 значена операція вимірювання зазначених значень параметрів виконується згідно з заздалегідь визначеним набором параметрів пошуку 5 Спосіб за п 4, який відрізняється тим, що зазначена первісна система передає зазначений заздалегідь визначений набір параметрів пошуку до зазначеної мобільної станції 6 Спосіб за п 2, який відрізняється тим, що операція вимірювання зазначених значень параметрів включає визначення, чи був перевищений мінімальний поріг потужності у зоні обслуговування першої нової системи 7 Спосіб за п 1, який відрізняється тим, що додатково передбачає передачу зазначеною первісною системою зазначеного списку для пошуку до зазначеної мобільної станції 8 Спосіб передачі зв'язку від первісної системи до нової системи у безпровідній системі зв'язку у випадку, коли мобільна станція переходить з зони обслуговування зазначеної первісної системи у зону обслуговування зазначеної нової системи, який передбачає операції - прогнозний вибір первісною станцією перших нових систем, - спроба мобільної станції встановити зв'язок з зазначеними першими новими системами, - пошук альтернативних нових систем у випадку, якщо спроба встановити зв'язок з зазначеними першими новими системами не мала успіху, - спроба встановити зв'язок мобільної станції з зазначеними альтернативними новими системами, обраними у результаті зазначеного пошуку альтернативних нових систем, і - відновлення зв'язку з первісною системою у випадку, якщо спроба встановити зв'язок з зазначеними альтернативними новими системами не мала успіху 9 Спосіб за п 8, який відрізняється тим, що додатково передбачає вимірювання мобільною станцією мінімального первинного сигналу від зазначених перших нових системи 10 Спосіб за п 9, який відрізняється тим, що спроба встановити зв'язок з зазначеними першими новими системами базується на локалізації зазначеного мінімального первинного сигналу 11 Спосіб за п 9, який відрізняється тим, що зазначеним мінімальним первинним сигналом є q 00 ю 45478 пілот-сигнал 12 Спосіб за п 8, який відрізняється тим, що зазначений пошук альтернативних нових систем включає вимірювання мобільною станцією мінімального вторинного сигналу 13 Спосіб за п 12, який відрізняється тим, що спроба встановити зв'язок мобільної станції з зазначеними альтернативними новими системами базується на локалізації зазначеного мінімального вторинного сигналу 14 Спосіб за п 12, який відрізняється тим, що зазначене відновлення зв'язку з первісною системою є результатом того, що локалізація зазначеного мінімального вторинного сигналу була невда лою 15 Спосіб за п 12, який відрізняється тим, що зазначеним мінімальним вторинним сигналом є сигнал потужності 16 Спосіб за п 8, який відрізняється тим, що додатково передбачає прийом мобільною станцією списку для пошуку перших нових систем, складеного згідно з прогнозним вибором перших нових систем, виконаним первісною системою 17 Спосіб за п 8, який відрізняється тим, що додатково передбачає прийом мобільною станцією списку для пошуку других нових систем, складеного згідно з прогнозним вибором других нових систем, виконаним первісною системою Винахід стосується систем зв'язку, зокрема, нового поліпшеного способу жорсткої передачі зв'язку між різними безпровідними системами зв'язку У системах зв'язку розширеного спектру з паралельним доступом з кодовим ущільненням каналів (ПДКУ) використовується спільна смуга частот для зв'язку з усіма базовими станціями системи Приклад такої системи можна знайти у стандарті TIA/EIA IS-95-A, включеному сюди посиланням Формування і прийом сигналів ПДКУ описано у патентах США 4 901 307 та 5 103 459, включених сюди посиланням Сигнали, що займають спільну смугу частот, розрізняються на приймальній станції за формою сигналів розширеного спектру з ПДКУ, різницю між якими зумовлено використанням швидкісного псевдошумового коду (ПШ) ПШ кодом модулюються сигнали, передані базовою станцією (далі - БС) і віддаленими мобільними станціями (далі - ВС) Сигнали від різних БС можуть роздільно прийматись на приймальній станції і розрізнятись за унікальним часовим зсувом, який кожна БС надає ПШ коду, призначеному цій БС Швидкісна модуляція ПШ дозволяє приймаючій станції приймати сигнал від БС у випадку, коли цей сигнал пройшов різними шляхами Демодуляцію множинних сигналів описано у патентах США 5 490 165 та 5 109 390, включених сюди посиланням або ПДРЧС (паралельний доступ з розділенням частот) Якщо у сусідній системі використовується ПДКУ з тією ж смугою, що і у первісній системі, між системами може бути здійснена м'яка передача зв'язку Якщо умови цього не дозволяють, зв'язок передають жорсткою передачею, тобто з припиненням поточного зв'язку перед встановленням нового Жорстка передача зв'язку від системи до системи стає необхідною, коли у цих системах використовуються різні типи зв'язку або коли дві системи з ПДКУ використовують різні смуги частот (міжчастотна жорстка передача зв'язку) Міжчастотна жорстка передача зв'язку може мати місце також у межах системи з ПДКУ Наприклад, регіон з високим попитом на зв'язок, такий, наприклад, як центр міста, може потребувати більшої КІЛЬКОСТІ частот, ніж передмістя Було б економічно неефективно займати усі наявні частоти системи Сеанс зв'язку на частоті, що використовується у перевантаженому регіону, має бути переданий, коли користувач переміщується у менш завантажений регіон Іншим прикладом може бути мікроволновий канал або інше обслуговування, що працює на частоті у межах системи Якщо користувач опиняється у зоні інтерференції від іншого типу обслуговування, може виявитись необхідним перевести сеанс зв'язку на іншу частоту Спільна смуга частот дозволяє ВС мати одночасний зв'язок з кількома БС, тобто знаходитись у стані м'якої передачі зв'язку (див патенти США 5 101 501 та 5 267 261, включені сюди посиланням) Подібним чином, ВС може мати одночасний зв'язок з двома секторами однієї БС Таку ситуацію називають м'якшою передачею зв'язку (див заявку 08/405 611 на патент США від 13/03/1995, включену сюди посиланням) Ці передачі зв'язку одержали такі назви тому, що новий зв'язок встановлюється перед припиненням існуючого Якщо мобільна станція (далі - МС) виходить за межі системи, з якою вона має поточний зв'язок, бажано підтримувати цей зв'язок, передавши його до сусідньої системи (якщо така існує) Сусідня система може бути безпровідною і працювати з використанням процедур ПДКУ, NAMPS, AMPS, ПДРЧ (паралельний доступ з розділенням часу) Передачу зв'язку можна здійснити різними способами Передачу зв'язку з використанням вимірювання якості сигналу описано у заявці 08/322 817 на патент США від 16/10/1994, включеній сюди посиланням Передачу зв'язку з використанням вимірювання затримки сигналу при проходженні у обох напрямках описано у заявці 08/652 742 на патент США від 22/03/1996, включеній сюди посиланням Передачу зв'язку від системи з ПДКУ до систем інших типів описано у заявці 08/413 306 на патент США від 30/03/1995, включеній сюди посиланням Згідно З ЦІЄЮ заявкою на межі системи встановлюються пілот-маяки, і коли МС сповіщає БС про ПІЛОТНІ сигнали, БС знає, що МС наближається до межі Коли система вирішує, що сеанс зв'язку має бути переведений до іншої системи жорсткою передачею зв'язку, до МС надсилається повідомлення з інструкцією зробити це і з параметрами, які уможливлюють встановлення зв'язку з іншою сис темою Оскільки система має лише оцінки фактичного положення МС, ці параметри не можуть бути гарантовано точними Наприклад, при передачі зв'язку з використанням маяків сила сигналу від пілот-маяка може бути придатним критерієм необхідності почати передачу зв'язку Однак, відповідна чарунка або чарунки у новій системі (вони утворюють Активну групу) не завжди ВІДОМІ, а включення усіх можливих чарунок може призвести до перевищення максимального об'єму Активної групи Для того, щоб МС могла встановити зв'язок у новій системі, вона мусить припинити зв'язок з старою системою Якщо з якоїсь причини параметри, надіслані до МС є хибними, тобто якщо змінилось довкілля МС або дані на БС про місцезнаходження МС не точні, встановлення нового зв'язку може виявитись неможливим, і тоді сеанс зв'язку буде припинено Після невдалої спроби встановити зв'язок МС може відновити зв'язок з старою системою, якщо це ще можливо Якщо не надійде додаткова інформація, а довкілля МС не зміниться, подальші спроби передати зв'язок будуть невдалими Таким чином, виникає потреба у способі здійснення додаткових спроб передачі зв'язку з більшою імовірністю успіху 45478 зсувів, за якими треба шукати, є достатнім для успішного пошуку, але можуть використовуватись ІНШІ пошукові алгоритми Після закінчення пошуку МС повертається до первісної системи і доповідає про відсутність знайдених пілот-сигналів, що перевищують третій поріг Якщо не було виявлено значної прийнятої потужності або пілот-сигналів під час пошуку, контролер системи може відкласти другу спробу передачі зв'язку, сподіваючись на покращення довкілля МС У іншому випадку МС може взагалі припинити спроби жорсткої передачі зв'язку, що найімовірніше призведе до припинення сеансу зв'язку Однак, якщо у наявності є нова система, контролер системи може оновити Активну групу, використовуючи результати пошуку, а нова система може належним чином змінити БС, що ведуть передачу до МС Тоді ДО МС надсилається повідомлення з інструкцією почати другу спробу жорсткої передачі зв'язку Якщо довкілля МС змінилось, ця спроба може виявитись успішною Задачею винаходу є зменшення імовірності втрати зв'язку під час міжсистемної жорсткої передачі зв'язку У випадку невдалої спроби жорсткої передачі зв'язку МС передає до первісної системи інформацію, яка допоможе системі зв'язку згідно з винаходом у подальших спробах передати зв'язок Перед передачею зв'язку первісна БС приблизно оцінює, які БС нової системи найбільш імовірно будуть обслуговувати МС, коли та увійде у нову систему Згідно З бажаним втіленням, БС надсилає до МС повідомлення з переліком сусідніх БС нової системи, мінімальним пороговим значенням рівня повної потужності при прийомі і значенням мінімального порогу пілот сигналу Якщо БС первісної системи визначає, що доцільно передати зв'язок, вона сповіщає сусідні БС нової системи про наближення МС і інструктує їх почати передачу у прямому каналі зв'язку до МС Перша спроба жорсткої передачі зв'язку починається після прийому МС повідомлення від БС, ІНІЦІЮЮЧОГО міжсистемну жорстку передачу зв'язку МС переходить на частоту нової системи і намагається встановити зв'язок з базовими станціями нової системи, використовуючи одержані необхідні для цього параметри (тобто зсуви пілотних ПШ кодів) Якщо мінімальний поріг енергії пілот-сигналу перевищено, передача зв'язку вважається успішною і МС залишається у новій системі Особливості, задачі и переваги винаходу більш докладно описано у подальшому описі з посиланнями на креслення, у яких фіг 1 містить схематичне зображення прикладу системи зв'язку розширеного спектру з ПДКУ згідно з винаходом, фіг 2 ілюструє типові ситуації, у яких може бути використаний винахід, фіг 3 ілюструє типову БС, фіг 4 ілюструє типову МС, фіг 5 містить алгоритм роботи згідно з винаходом На фіг 1 зображено втілення системи зв'язку з використанням винаходу Типова система зв'язку з ПДКУ має контролер системи з перемикачем 10, який має зв'язок з однією або більше БС 12, 14, 16 Контролер 10 системи з перемикачем має зв'язок також з комунальною комутаторною телефонною системою (ККТМ) (не показаною) і з іншими (не показаними) системами зв'язку МС 18 є типовим абонентом з прямими каналами 20Б, 22Б, 24Б і зворотними каналами 20А, 22А, 24А зв'язку Контролер 10 системи з перемикачем керує м'якими і жорсткими міжчастотними передачами зв'язку у системі, а також міжсистемними жорсткими передачами зв'язку У прикладі втілення винаходу розглядаються міжчастотні жорсткі передачі зв'язку між системами з ПДКУ Зрозуміло, що концепції винаходу можуть бути застосовані для передачі зв'язку з використанням паралельного доступу і для передач зв'язку між системами, використовуючими різні типи модуляції Якщо цей поріг не був перевищений, починається процедура відновлення МС виміряє повну енергію, що надходить у смузі частот нової системи і порівнює її з порогом повної потужності при прийомі Якщо цей поріг не перевищено, передача зв'язку негайно припиняється МС повертається до первісної системи і сповіщає, що енергія на новій частоті незначна Якщо поріг повної потужності перевищено, встановлення зв'язку у новій системі можливе, але сусідні БС, визначені первісною системою (нова Активна група) не прийнятні для зв'язку МС після цього починає пошук придатних пілот-сигналів у новій системі Взагалі перелік Фіг 2 ілюструє три можливі ситуації, у яких використовується винахід Три МС М1, М2, МЗ переміщуються з системи S1, у якій були початі сеанси зв'язку, до сусідньої системи S2, яка працює на ІНШІЙ частоті Спочатку МС М1, М2, МЗ мають зв'язки з однією або більше БС системи S1 Коли кожна з МС переходить через межу від S1 до S2, здійснюється спроба жорсткої передачі зв'язку Нова система S2 містить БС Б1-Б5, які обслуговують ВІДПОВІДНІ зони С1-С5 Система S2 може мати і ІНШІ БС (не показані), які не впливають на ситуацію Зони обслуговування можуть перетинатись, і у зонах перекриття МС може підтримувати зв'язок з кожною з БС або з обома одночасно, якщо відбувається м'яка передача зв'язку На фіг 3 зображено перешкоджаючі об'єкти 01-03 Ці об'єкти спотворюють зони обслуговування, які за їх відсутності були б круговими Зона С5 має особливо незвичайну форму Розглянемо спочатку МС М1 Вона ілюструє випадок, коли жорстку передачу зв'язку можна успішно здійснити як у існуючий спосіб, так і згідно з винаходом Коли МИ наближається до межі S1S2, первісна система S1 визначає імовірних сусідів у новій системі S2, базуючись на ОЦІНЦІ місцезнаходження М1 Через БС, що має зв'язок з М1, S1 передає до М1 значення зсувів ПШ кодів для зон системи S2, наприклад, С1-С5 У прикладі втілення S2 також надсилає параметри для мінімального прийнятого пілот-сигналу MIN_TOT_PILOT і мінімальної прийнятої потужності MIN_RX_PWR У іншому втіленні М1 може зберігати значення MIN_TOT_PILOT та MIN_RX_PWR або бути здатною сформувати ці значення, базуючись на даних системи Після ЦЬОГО S1 починає надсилати повідомлення до S2 з інструкціями створити на БС Б2 та БЗ прямі канал для даних, призначених для МС М1 БС Б2 та БЗ є найбільш придатними для встановлення зв'язку і входять у нову Активну групу S1 надсилає до МС М1 ініціююче повідомлення, інструктуючи и почати жорстку передачу зв'язку Оскільки ДОВКІЛЛЯ М1 сприяє проходженню, після переходу до нової частоти М1 знайде пілотсигнали і успішно демодулює інформацію, що надходить у прямому каналі від нової Активної групи, тобто БС Б2 та БЗ, як це прогнозувалось системою S1 МС М1 встановлює успішність жорсткої передачі зв'язку, виявивши, що прийнятий повний пілот-сигнал перевищує поріг MIN_TOT_PILOT Після встановлення успішності цієї передачі зв'язку система S1 вивільняє ресурси, призначені до цього для підтримання зв'язку з МС М1 Ця успішність встановлюється повідомленням від системи S2, або після заздалегідь визначеної часової затримки, під час якої зв'язок системи S1 з М1 відсутній 45478 8 довжує покидати зону системи S1, то, оскільки сеанс зв'язку не припинено, що мало б місце у існуючих системах, виникає кілька варіантів Сеанс зв'язку може продовжуватись у системі S1, доки не припиниться з-за зростання відстані Оскільки довкілля МС змінюється, друга спроба передачі зв'язку через деякий час може виявитись успішною Нарешті розглянемо МС МЗ Як і для МС М1, М2, процедура передачі зв'язку починається утворенням нової Активної групи БС з зонами обслуговування С1, С2 Перешкоджаючі об'єкти 0 1 , 02 не дозволяють МС МЗ використати запропоновані БС, тобто MIN_TOT_PILOT не перевищено Знову починається процедура відновлення Цього разу у межах можливого зв'язку знаходиться БС Б5, але и зсув не внесено у нову Активну групу, і вона не передає у прямому каналі до МЗ Таким чином, хоча до цієї БС нема доступу, поріг MIN_RX_PWR буде перевищений У прикладі втілення винаходу, оскільки система виляється доступною, виконується пошук придатних пілот-сигналів Після закінчення пошуку МС МЗ повертається до системи S1 і повідомляє про невдалу спробу передачі зв'язку і про наявність доступних ПІЛОТІВ, у даному випадку пілот-сигналу зони С5 Згідно з винаходом, S1 надсилає до S2 повідомлення з інструкцією створити прямий канал зв'язку на БС Б5, після чого можна зробити другу спробу передачі зв'язку Якщо в довкілля не зазнало суттєвих змін, після другого переходу МЗ на нову частоту зв'язок буде успішно переведено до БС Б5 нової системи S2 Далі розглянемо МС М2, яка знаходиться у зоні непевного обслуговування системою S2, яку часто називають діркою Коли МС М2 наближається до межі S1-S2, система S1 прогнозує, що М1 буде обслуговуватись системою S2 у зоні С1 Передача зв'язку ІНІЦІЮЄТЬСЯ, як і раніше Однак, після переходу до частоти системи S2 МС М1 не може прийняти сигналу значної енергії внаслідок перешкод, створених об'єктом 03, тобто прийнятий повний пілот-сигнал не досягає рівня MIN_TOT_PILOT У існуючих системах зв'язок на цьому припиняється У системі згідно з винаходом МС починає процедуру відновлення На фіг 3 зображено типову БС БС 300 має зв'язок з іншими системами (не показаними) і з контролером 10 системи з перемикачем (фіг 1) через системний інтерфейс 310 Міжчастотна передача зв'язку є розподіленим процесом, причому контролер 10 системи з перемикачем і БС 300 виконують певні функції, пов'язані з передачею зв'язку Контролер 10 системи разом з БС 300 визначає необхідність міжсистемної жорсткої передачі зв'язку Цю необхідність можна визначати у різні способи, включаючи, як описано вище, визначення місцезнаходження МС або прийом від пілотмаяків Первісна система інструктує нову систему (не показану) почати передачу у прямому каналі на частоті нової системи від обраної групи БС База даних (не показана) у керуючому процесорі 360 може містити БС-кандидати У іншому варіанті, перелік БС-кандидатів на передачу до них зв'язку може бути повернутий від нової системи до керуючого процесора 360 через системний інтерфейс 310 У випадку, коли нова система не є системою з ПДКУ, до керуючого процесора 360 через системний інтерфейс 310 надсилаються значення інших параметрів, необхідних для встановлення зв'язку у новій системі Як тільки МС визначає, що пілот-сигнал або пілот-сигнали, запропоновані системою S1, відсутні, М2 виміряє прийняту повну потужність у новій смузі частот і порівнює результат з MIN_RX_PWR У цьому прикладі єдиним передавачем поблизу М2 є БС Б1 і її сигнал блоковано об'єктом 03, внаслідок чого у смузі частот нової системи нема достатньої енергії МС М2 припиняє процес передачі зв'язку і повертається до системи S1, повідомивши її, що систему S2 не знайдено Якщо МС М2 про Параметри і інструкції від керуючого процесора 360 надсилаються у вигляді повідомлень, що формуються у генераторі 320 повідомлень, модулюються модулятором 330 і передаються до МС передавачем 340 через антену 350 У прикладі втілення модулятор 330 є модулятором типу ПДКУ, описаний у вже згаданих патентах США 4 901 307 та 5 103 459, а список сусідніх БС, MIN_TOT_PILOTTa MIN_RX_PWR утворюють єдине повідомлення "Повідомлення з Списком Сусідів 45478 Іншої Частоти " (ПССІЧ) БС надсилає до МС повідомлення з інструкцією зробити спробу встановлення зв'язку з новою системою і з Активною групою нової системи (Розширене Повідомлення про Напрямок Передачі Зв'язку - РПНПЗ) У випадку невдачі для полегшення жорсткої передачі зв'язку до МС можуть бути передані додаткові параметри, наприклад, список зсувів або межі значень зсувів, що підлягають пошуку, або певний алгоритм пошуку, наприклад, інструкцію вести пошук підвищенням зсуву кроками у 64 елементи, починаючи з зсувів, що при спробі відповідали БС з ПССІЧ Після невдалої спроби жорсткої передачі зв'язку МС виконує одержані інструкції, потім повертається до первісної системи і доповідає про результати пошуку Сигнали зворотного каналу від МС до БС приймаються антеною 390, приймач 380 знижує їх частоту, а демодулятор 370 під керуванням керуючого процесора 360 демодулює їх На фіг 4 зображено типову МС Повідомлення через антену 610, антенний перемикач 600, приймач 590 і демодулятор 570 надходять до керуючого процесора 520 У прикладі втілення приймач 590 є демодулятором ПДКУ, описаний у вже згаданих патентах США 4 901 307 та 5 103 459 Прийнявши від БС 300 повідомлення РПНПЗ, керуючий процесор надає команду приймачу 590 і передавачу 560 перейти на нову частоту У цей момент зв'язок з первісною системою переривається Керуючий процесор 520 інструктує демодулятор 570 почати демодулювати пілот-сигнали з зсувами Активної групи, переданими від БС 300 у повідомленні РПНПЗ Енергія сигналів, демодульованих з цими зсувами, накопичуються у акумуляторі 530 пілот-енергм і використовуються керуючим процесором 520 для порівняння з MIN_TOT_PILOT Якщо MIN_TOT_PILOT перевищено, передача зв'язку визначається як успішна, у іншому разі починається процедура відновлення У іншому варіанті для визначення передачі зв'язку як успішної, необхідно прийняти певну КІЛЬКІСТЬ N якісних кадрів (без помилок, виявлених КЦН) протягом зумовленого інтервалу Т Першим кроком після невдалої спроби жорсткої передачі зв'язку є визначення доступності нової системи Акумулятор 540 прийнятої енергії накопичує прийняту повну потужність у смузі частот нової системи і надсилає результат до керуючого процесора 520, який порівнює ці накоплені значення з порогами MIN_TOT_PILOT та MIN_RX_PWR Якщо MIN_RX_PWR не перевищено, спроба припиняється Приймач 590 та передавач 560 повертаються до попередньої частоти, а керуючий процесор 520 формує повідомлення, яким БС 300 сповіщається про невдалу спробу передачі зв'язку і пошук нової системи Повідомлення надходить до модулятора 550, який модулює його, і потім до передавача 560, антенного перемикача 600 и антени 610 для передачі МС 500 містить інформацію про бажані системи у таблиці 510 Якщо нову систему не знайдено, МС 500 може передати інформацію про іншу систему до БС 300 і зробити спробу встановити зв'язок з іншою системою під час наступної спроби жорсткої передачі зв'язку Наприклад, сусідній регіон може обслуговуватись кількома системами, 10 включаючи системи з ПДКУ та системи іншого типу Таблиця 510 може бути запрограмована таким чином, що у випадку невдалої спроби встановити зв'язок з першою системою, така спроба повторюється з другою системою Якщо і ця спроба виявиться невдалою, спроби повторюються з іншими системами Спроби передачі зв'язку можуть повторюватись у порядку пріоритетів, доки усі можливі системи не буде вичерпано Якщо MIN_RX_PWR перевищено, що вказує на наявність доступу до нової системи, МС працює за одержаними інструкціями У прикладі втілення шукач 580 виконує пошук пілотних зсувів, що відповідають доступним БС нової системи Для цього шукач 580 генерує ПШ ПОСЛІДОВНІСТЬ З певним зсувом, а демодулятор 570 корелює дані, що надходять, з цією ПОСЛІДОВНІСТЮ Акумулятор 530 енергії пілот-сигналів виміряє енергію, що відповідає цьому зсуву, акумулюючи примірники протягом зумовленого інтервалу Керуючий процесор 520 порівнює результат з порогом T_ADD, щоб визначити доступність пілота з цим зсувом Після цього шукач 580 переходить до наступного кандидата Процес повторюється, доки усі кандидати не будуть перевірені Процес пошуку описано у заявці 08/509 722 на патент США від 26/07/1996, включеній сюди посиланням Винахід включає також ІНШІ алгоритми пошуку для, шукача 580 Пошук після невдалої жорсткої передачі зв'язку може проводитись на усіх можливих зсувах, або у межах підгрупи зсувів Наприклад, можна проводити пошук у певних межах У прикладі втілення ПССІЧ містить підгрупу зсувів, у якій має проводитись пошук, а сусідні БС розділені цілими загальними множниками у 64 елементи Якщо зсув для однієї БС системи відомий (якщо навіть ця БС у цей момент не є доступною), тільки ті зсуви, що відповідають згаданому співвідношенню, підлягають пошуку для перевірки доступності усіх сусідніх БС Можна також вести пошук за окремими зсувами у певних межах або наборі таких меж Якщо нова система належить до іншого типу, можуть бути використані ІНШІ процедури для одержання інформації, що допомагає у подальших спробах жорсткої передачі зв'язку Наприклад, якщо нова система працює з ПДРЧ, МС може виміряти енергію смуги у багатьох підсмугах частот і передавати результат до первісної системи У випадку системи AMPS БС може передати ПССІЧ, яким визначаються частоти аналогових службових каналів Однак, нема необхідності сповіщати про частоти службових каналів, якщо вони ВІДОМІ У цьому випадку, якщо МС знаходить, що голосовий канал, до якого її було передано, занадто слабкий, вона може почати вимірювання енергії у аналогових службових каналах Вона може також визначити цифровий кольоровий код (ЦКК) для службового каналу КЦЦ дозволяє краще визначити належну зону обслуговування, коли МС приймає сигнали кількох зон регіону Частоти та КЦЦ найсильніших аналогових БС можуть бути використані як інформація для подальших спроб передачі зв'язку Подальше обговорення КЦЦ можна знайти у W С Y Lee, "Mobile Cellular Telecommunications Systems" Після завершення необхідних функцій МС 500 11 45478 12 приймач 590 і передавач 560 повертаються до датів для підтримання зв'язку МС веде моніторинг первісної частоти, і керуючий процесор 520 через сигналів прямого каналу від кожної БС з цього модулятор 550, передавач 560, антенний передарозширеного переліку вач 600 і антену 610 сповіщає БС 300 про невдалу Після завершення цього моніторингу МС поспробу передачі зв'язку і передає їй інформацію, вертається до первісної системи і надсилає повідодержану під час процедур пошуку системи омлення про силу сигналів прямих каналів БС, що входять до зазначеного розширеного переліку У Блок-схема алгоритму (фіг 5) ілюструє роботу прикладі втілення МС порівнює силу сигналів, бажаного втілення винаходу Після визначення прийнятих кожною з БС розширеного переліку, з необхідності передачі зв'язку первісна система зумовленим порогом T_ADD і сповіщає тільки про пропонує перелік сусідніх БС, що працюють на перевищення сигналами цього порогу або недосячастоті сусідньої системи (операція 50) Наступгнення його ною операцією 52 БС первісної системи надсилає до МС ПССІЧ, описане вище Операцією 53 визнаБС первісної системи приймає інформацію про чається Активна група для нової частоти Операцісилу сигналів кожної з БС нової системи і викорисєю 54 нова система створює прямий канал згідно з товує и для складання списку Активної групи Цей РПНПЗ, після чого БС первісної системи надсилає список надсилається до нової системи, яка у ВІДРПНПЗ до МС, ІНІЦІЮЮЧИ цим міжчастотну жорстку ПОВІДНОСТІ з цим списком створює прямі канали передачу зв'язку (операція 56) Після цього МС для МС БС первісної системи надсилає список переходить на нову частоту і намагається встаноАктивної групи до МС, яка намагається встановити вити зв'язок з новою системою, базуючись на дазв'язок з БС цього списку і, якщо це можливо, сених Активної групи і повідомленні РПНПЗ (операанс зв'язку продовжується ція 58) У іншому втіленні (фіг 2) передбачено пошук МС МЗ Коли первісна система S1 визначає, що Операцією 60 МС виміряє пілотну енергію, суМС МЗ має почати жорстку передачу зв'язку до му енергій усіх пілот-сигналів з Активної групи, і нової системи S2, БС первісної системи S1, яка якщо прийнята повна енергія перевищує має поточний зв'язок з МС МЗ, створює розширеMIN_TOT_PILOT, відбувається перехід до 62 (усний перелік БС у S2, з якими МС може бути здатпішна передача зв'язку) Приклад втілення передної встановити зв'язок У прикладі втілення цей бачає можливість передачі зв'язку безпосередньо розширений лист кандидатів складається з парау стан м'якої передачі зв'язку у новій системі, але метрів, необхідних для пошуку серед усіх БС Б1це не є обов'язковим Якщо прийнята енергія лише Б5, а також додаткових БС системи S2 (не показаодного пілот-сигналу Активної групи перевищує них) У іншому втіленні винаходу інформація про MIN_TOT_PILOT, це є достатньою умовою успішМЗ на цій стадії до системи S2 не надсилається ної передачі зв'язку Якщо MIN_TOT_PILOT не перевищено (опеМС МЗ переходить на частоту нової системи рація перевірки 60), відбувається перехід до 68 S2 і виміряє енергію пілот-каналів кожної з БС Операцією 68 здійснюється перевірка, чи перевирозширеного переліку кандидатів МС МЗ надсищує прийнята повна потужність у смузі частот палає до БС первісної системи S1 зворотне повідраметр MIN_RX_PWR Якщо це так, це вказує на омлення про можливість встановлення зв'язку з наявність нової системи, і відбувається перехід до БС Б5 У ВІДПОВІДЬ БС первісної системи складає 66, у іншому разі - перехід до 69 список Активної групи, який містить тільки БС Б5 Інше втілення передбачає оцінювання прийняБС первісної системи надсилає до нової систої повної потужності перед оцінюванням пілотної теми S2 повідомлення, яким інформує, що БС Б5 енергії Якщо поріг MIN_RX_PWR не перевищено, має встановити прямий канал до МС МЗ У ВІДПОпередача зв'язку припиняється У деяких застосуВІДЬ система S2 створює такий канал До МС МЗ ваннях цей варіант може виявитись швидшим надсилається список Активної групи У ВІДПОВІДЬ МС МЗ робить спробу встановити зв'язок з БС Б5 Операція 66 передбачає пошук можливих зсувів доступних пілот-сигналів У даному випадку Генератор 320 повідомлень у БС 300 первісної може бути використана інша процедура пошуку системи (фіг 3) складає розширений список канПісля завершення пошуку - перехід по 65 МС подидатів і надсилає його до модулятора 330 повідвертається до первісної системи (операція 65), омлень Модульоване повідомлення після цього потім - перехід до 64 Операцією 64 здійснюються надходить до передавача 340, який підвищує часнеобхідні зміни у ПССІЧ, після чого відбувається тоту сигналу і підсилює його і передає сигнал чеперехід назад до 52 рез антену 350 Операцією 69 МС повертається до первісної Переданий сигнал (фіг 4) приймається антесистеми, операцією 72 приймається рішення проною 610 МС 500, приймач 590 знижує частоту, довжувати спроби передати зв'язок (перехід до 70) фільтрує і підсилює сигнал, який потім демодулюабо припинити процедуру (операція 64) Як варіється демодулятором 570 і надсилається до керуант, після затримки після операції 70 відбувається ючого процесора 520 Процесор 520 формує групу перехід до 64 команд, яким інструктує шукач 580 почати пошук Шукач 580 надсилає набір пошукових параметрів У іншому втіленні винаходу БС надсилає до демодуляції до демодулятора 570 Демодульовані МС розширений перелік БС, які можуть виявитись сигнали надходять до акумулятора 530 енергії доступними у МІСЦІ входження МС у нову систему пілот-сигналів, який виміряє силу пілот-сигналів У цьому випадку не передбачається негайного БС розширеного переліку кандидатів Значення створення прямих каналів у новій системі МС енергії від кожного цих кандидатів надходить до просто визначає, чи є достатньою сила сигналу керуючого процесора 520, який порівнює виміряну будь-якої БС з цього розширеного переліку канди 13 45478 енергію з порогом T_ADD і формує повідомлення, яке вказує, які сигнали від БС-кандидатів перевищують поріг (якщо такі є) Це повідомлення надходить до модулятора 550, який модулює його Модульований сигнал надходить до передавача 560, який підвищує частоту сигналу, підсилює його і передає через антену 610 Повідомлення про сили сигналів БС-кандидаті в приймається антеною 390 БС 300 первісної системи Приймач 380 знижує частоту сигналу, підсилює його і надсилає до демодулятора 370, який демодулює його і надсилає до керуючого процесора 360 Процесор 360 складає для нової системи список Активної групи згідно з інформацією з повідомлення про результати пошуку, переданого МС 500 У прикладі втілення цей список складається з усіх БС, чиї сигнали, як це було виявлено під час моніторингу МС 500, перевищували поріг T_ADD енергії Керуючий процесор 360 надсилає список Активної групи до системного інтерфейсу 310, через який цей список надходить до нової системи S2 Система S2 при наявності ресурсів створює прямі канали на усіх БС Активної групи Крім того, процесор 360 надсилає список Активної групи до генератора 320 повідомлень, який формує відповідне повідомлення, після чого воно модулюється модулятором 330 і передається, як це було описано У МС 500 повідомлення приймається антеною 610, сигнал демодулюється, як це описано вище, і 14 надходить до керуючого процесора 520, який надсилає інформацію, що стосується списка Активної групи, до демодулятора 570 і приймача 590, після чого, використовуючи параметри БС з списка Активної групи, МС робить спробу жорсткої передачі зв'язку до нової системи S2 Слід зауважити, що, оскільки у цьому варіанті список Активної групи був визначений у МС, для МС нема необхідності приймати цей список, оскільки МС його вже має Отже у іншому втілення МС може здійснювати передачу зв'язку до БС, сигнали яких перевищують поріг, після деякої зумовленої затримки 3 іншого боку, якщо Активна група не є копією списку БС, сигнал яких перевищує поріг, а складена з увагою до параметрів, не відомих МС, наприклад, визначаючих об'єм S2, то передача такого повідомлення може виявитись корисною У іншому варіанті МС періодично переходить на нову частоту і виміряє зсуви, визначені ПССІЧ, без додаткових даних від БС Періодичність може визначатись ПССІЧ Після завершення пошуку МС повертається до первісної системи і сповіщає про результати Ця інформація може бути використана при формуванні Активної групи для наступної спроби передачі зв'язку або визначенні необхідності передачі зв'язку до цієї системи Наведений опис бажаних втілень дає змогу будьякому фахівцю використати винахід, зробивши за необхідності потрібні модифікації, а основні принципи, закладені у винахід, дозволяють побудувати ІНШІ втілення, не виходячи за його межі Наведений опис, таким чином, не обмежує винаходу •24В Фіг. 1 45478 15 16 Фіг. 2 -3S0 ^360 ІНША доме ЄАЗОНЙ СТАНЦІЯ Фіг. З -510 г тлвлиця І 580 ШУКАЧ с 520 ИЗО d!70 Ж КЕРУЮЧИЙ ПРИЙМАЧ АКУМУЛЯТОР ПРИЙНЯТОЇ ШЕРПИ /-S50 зсо Фіг. 4 45478 17 ПРОГНОЗНИЙ ПЕРЕПІК СУСІДНІХ ВС НА ІНШІЙ ЧАСТОТІ ^•64 ОНОВЛЕННЯ ДЛЯ НС f ПССІЧ) ЯКЩО ВЕОЕХРДНС -53 ПОЙУДОВА АКТИВНОЇ ГРЖМ нової ЧАСТОТИ •-54 ДО ГІЄРЗІС«ОІ с У ©SCtJSM-ІЙ СИСТЕМ! ПИ»ЕДДЧД рпмпз для ішшгавдння /•66 ЖО!»СТКаі ПЕРЕДАЧ! ЗВ'ЯЗКУ ПОШУК 0ІДОТ сигндят ПЕРЕЇСИ МС НА НОВУ Ч « Т О Т У ТА й л-сигнАяда эпдао з пеш ФІГ. 5 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна (044)456-20- 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71 18
ДивитисяДодаткова інформація
Автори англійськоюChen Tao
Автори російськоюЧен Тао
МПК / Мітки
МПК: H04L 12/00
Мітки: мобільного, системами, передачі, абонента, жорсткої, варіанти, зв'язку, участю, спосіб
Код посилання
<a href="https://ua.patents.su/9-45478-sposib-zhorstko-peredachi-zvyazku-mizh-sistemami-zvyazku-za-uchastyu-mobilnogo-abonenta-varianti.html" target="_blank" rel="follow" title="База патентів України">Спосіб жорсткої передачі зв’язку між системами зв’язку за участю мобільного абонента (варіанти)</a>
Стільникова система зв’язку (варіанти), спосіб керування потужністю передачі у стільниковій системі зв’язку (варіанти), мобільний пристрій та контролер стільникової станції та системи
Номер патенту: 42677
Опубліковано: 15.11.2001
Автори: Уівер Ліндсі А. мол., Блейкні Роберт Д., Уітлі Чарлз Е., Падовейні Роберто, Гілхаузен Клайн С.
МПК: H04L 27/26
Мітки: системі, станції, потужністю, передачі, система, керування, спосіб, стільниковій, зв'язку, мобільній, стільникової, стільникова, пристрій, варіанти, контролер
Формула / Реферат:
1. Сотовая система связи, в которой пользователь (16, 18) системы поддерживает двустороннюю связь с другим пользователем несущими информацию модулированными сигналами расширенного спектра, передаваемыми через несколько сотовых станций (12, 14), отличающаяся тем, что пользователь (16, 18) системы имеет передатчик (84) для передачи несущих информацию модулированных сигналов расширенного спектра указанным сотовым станциям (12, 14), приемники...
Пристрій для індикації номера викликаючого абонента на телефонному апараті абонента, що виключається
Номер патенту: 4186
Опубліковано: 27.12.1994
Автори: Шпіта Олександр Васильович, Юрченко Віталій Анатолійович, Нікулін Валерій Павлович, Бондарева Клавдія Володимирівна, Шапошніков Віктор Васильович
МПК: H04M 1/57
Мітки: пристрій, номера, індикації, викликаючого, виключається, апараті, абонента, телефонному
Формула / Реферат:
1. Устройство для индикации номера вызывающего абонента на телефонном аппарате вызываемого абонента, содержащее последовательно соединенные блок фильтров и дешифратор, последовательно соединенные преобразователь сигналов, распределитель, блок памяти и блок индикации, при этом выходы дешифратора соединены с входами данных блока памяти, отличающееся тем, что введены последовательно соединенные генератор импульсов, счетчик, управляющий блок и...
Пристрій індикації номера викликаючого абонента на телефонному апараті абонента, що викликається
Номер патенту: 19468
Опубліковано: 25.12.1997
Автори: Новський Володимир Олександрович, Рибчинський Юхим Борисович, Самкова Вікторія Юхимівна, Самков Олександр Всеволодович, Устинов Юрій Євгенійович
МПК: H04M 1/57
Мітки: телефонному, викликається, апараті, пристрій, індикації, номера, викликаючого, абонента
Формула / Реферат:
Устройство индикации номера вызывающего абонента на телефонном аппарате вызываемого абонента, содержащее на стороне вызываемого абонента последовательно соединенные блок фильтров и дешифратор кода, а также последовательно соединенные преобразователь, распределитель, блок памяти и блок индикации, отличающееся тем, что введены блок литания, блок сопряжения, контроллер, блок подмены, диоды с первого по шестой, причем блок питания соединен по...
Спосіб передачі даних із периферійного пристрою радіотелефону (варіанти) та пристрій для його здійснення (варіанти)
Номер патенту: 37250
Опубліковано: 15.05.2001
Автори: Патрік Дж.Меррі, Джеффрі У.Тріпп, Брюс М.Пагжот
Мітки: периферійного, даних, здійснення, пристрій, варіанти, спосіб, пристрою, передачі, радіотелефону
Формула / Реферат:
1. Способ передачи данных из периферийного устройства радиотелефона в радиотелефон через шину данных с временным мультиплексированием, отличающийся тем, что используют следующие этапы:а) генерирование приоритетных данных в ответ на условие занятости линии при включении периферийного радиотелефона;б) прием нескольких информационных разрядов;в) компоновка указанных приоритетных данных и принятых информационных разрядов для...
Спосіб визначення номера визивного абонента
Номер патенту: 32790
Опубліковано: 15.02.2001
Автори: Доминов Андрій Олегович, Роганін Анатолій Федорович
МПК: H04M 15/04
Мітки: номера, визначення, спосіб, визивного, абонента
Формула / Реферат:
1. Спосіб визначення номера визивного абонента, що включає перевірку наявності вихідної розмови абонента автоматичної телефонної станції шляхом підключення до групового обладнання за сигналом станційної апаратури визначення номера, обробку одержаної інформації на електронно-обчислювальній машині, який відрізняється тим, що вихідну розмову абонента виявляють під час з'єднання визивного абонента з груповим обладнанням реєстрацією наявності...