Спосіб акустичного зондування атмосфери
Номер патенту: 46160
Опубліковано: 15.05.2002
Автори: Карташов Володимир Михайлович, Васильченко Андрій Олександрович
Формула / Реферат
Спосіб акустичного зондування атмосфери, який полягає у випромінюванні в атмосферу в довільно вибраному напрямку акустичних синусоїдальних коливань, прийомі акустичних коливань, розсіяних на природних неоднорідностях атмосфери, вимірі параметрів розсіяного сигналу, обчисленні параметрів атмосфери по виміряних значеннях параметрів розсіяного сигналу, який відрізняється тим, що попередньо виконують аналіз розподілу за напрямками зовнішніх акустичних перешкод в межах вибраного сектора огляду, визначають напрямок, на якому рівень перешкод має найменше значення, і випромінюють в цьому напрямку зондувальні акустичні коливання.
Текст
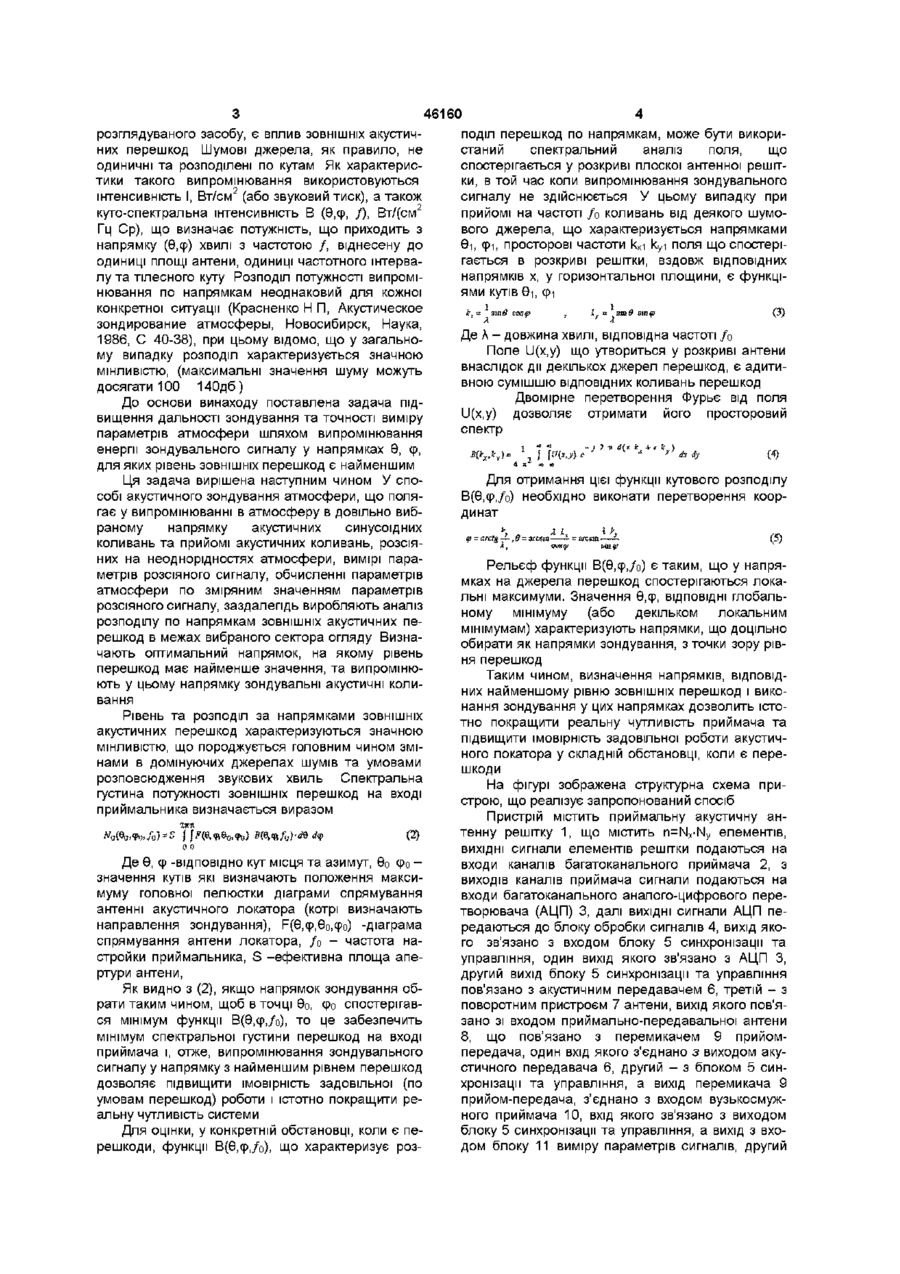
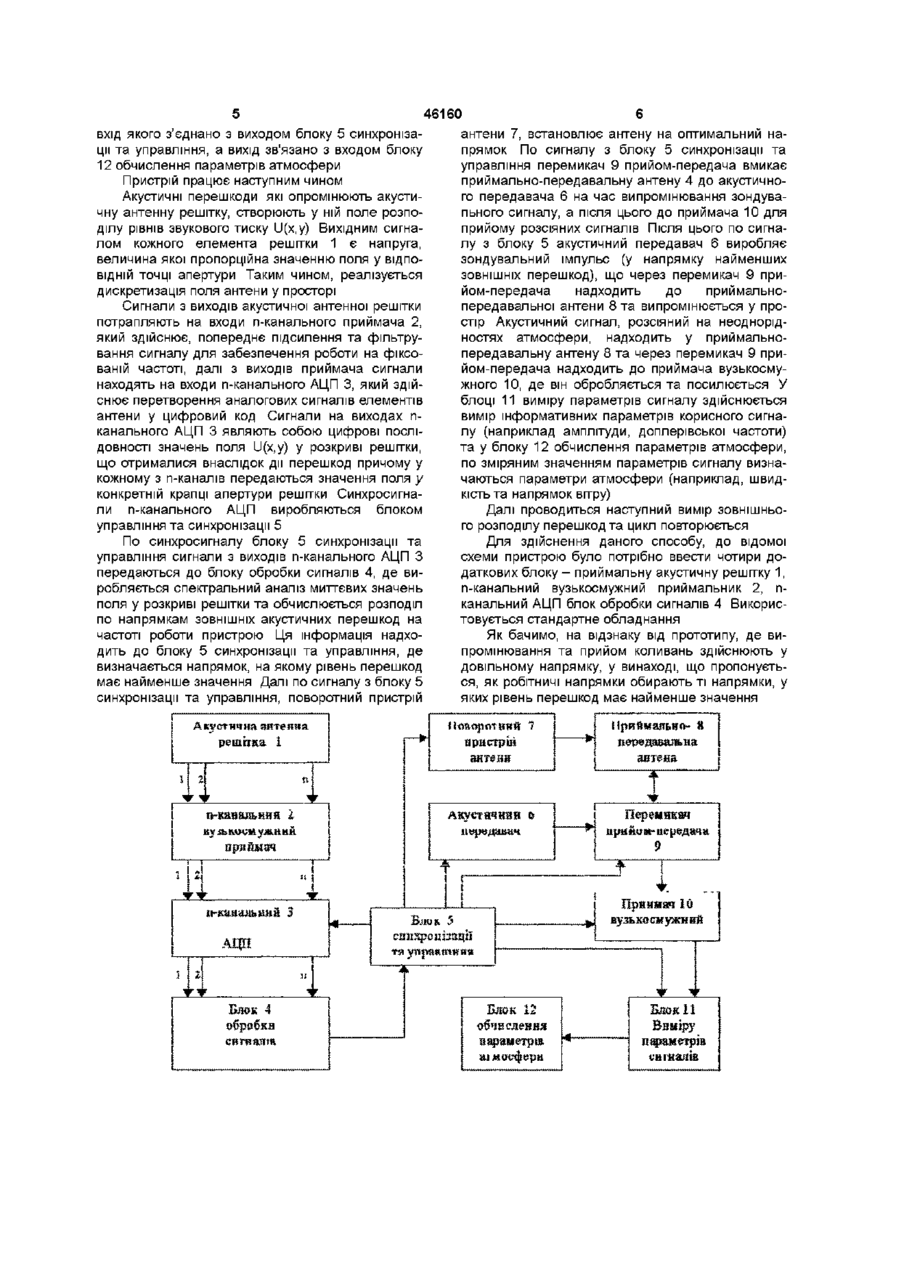
Спосіб акустичного зондування атмосфери, який полягає у випромінюванні в атмосферу в довільно вибраному напрямку акустичних синусоїдальних коливань, прийомі акустичних коливань, розсіяних на природних неоднорідностях атмосфери, вимірі параметрів розсіяного сигналу, обчисленні параметрів атмосфери по виміряних значеннях параметрів розсіяного сигналу, який відрізняється тим, що попередньо виконують аналіз розподілу за напрямками ЗОВНІШНІХ акустичних перешкод в межах вибраного сектора огляду, визначають напрямок, на якому рівень перешкод має найменше значення, і випромінюють в цьому напрямку зондувальні акустичні коливання Винахід відноситься до метеорологи, а саме до акустичних засобів визначення параметрів атмосфери та може бути використаний при метеорологічному забезпеченні злітання і посадки літаків, а також при прогнозуванні метеорологічних ситуацій, що доводить до підвищеної концентрації забруднень у прикордонному шарі атмосфери Відомий спосіб виміру параметрів атмосфери по куту приходу розсіяної хвилі (Красненко Н П Акустическое зондирование атмосферы Новосибирск, Наука, 1986, С 108-112) заснований на випромінюванні до атмосфери акустичних коливань розсіюванні акустичних коливань на неоднорідностях атмосфери та прийомі розсіяного сигналу Параметри атмосфери визначають за результатами виміру параметрів розсіяного сигналу Тут фактично вимірюється середня різниця фаз сигналів, що реєструються у різних точках апертури антени, а кут приходу хвилі оцінюється з формули, де величина середньої різниці фаз висловлена як функція метеопараметрів атмосфери Наведена формула при моностатичній схемі зондування задачі, що вирішується у запропонованому винаході є акустичний доплерівський спосіб визначення швидкості вітру (Красненко Н П Акустическое зондирование атмосферы, Новосибирск, Наука, 1986 С 105-108) Він полягає у випромінюванні до атмосфери акустичних коливань з деякою фіксованою частотою / э в довільно вибраному напрямку, прийомі акустичних коливань, розсіяних на природних неоднорідностях атмосфери, які рухаються під впливом вітру, вимірі доплерівського зрушення частоти розсіяного сигналу та обчисленні швидкості вітру Якщо випромінювання та прийом коливань здійснюється з однієї точки, то швидкість вітру обчислюється згідно з формулою Відзначається, що виміри різниці фаз сигналів акустичним локатором дозволяють оцінити за пеленгаційною формулою кут приходу хвилі тільки з точністю першого наближення за ступенем збурення показника заломлення Таким чином, даний спосіб не має достатньо високої точності виміру параметрів атмосфери внаслідок сильного впливу зовнішнього шумового поля Найбільш близьким за технічною суттєвістю що випромінюються Отже величина V цілком визначається / э Для визначення повного вектору швидкості вітру V проводять виміри його радіальних компонентів V1, V2, V3 у трьох різноманітних напрямках (Красненко Н П Акустичне зондування атмосфери, Новосибирск, Наука, 1986, С 106-108) Основним чинником, що обмежує точність виміру швидкості вітру та максимальну дальність дії Де с - швидкість звука, fe = fn~fu~ доплерівський зсув частоти, / „ - центральна частота сигналу що приймається, fu - частота коливань, О О (О (О 46160 розглядуваного засобу, є вплив ЗОВНІШНІХ акустичних перешкод Шумові джерела, як правило, не одиничні та розподілені по кутам Як характеристики такого випромінювання використовуються 2 інтенсивність І, Вт/см (або звуковий тиск), а також 2 куто-спектральна інтенсивність В (9,ер, Д Вт/(см Гц Ср), що визначає потужність, що приходить з напрямку (9,ер) хвилі з частотою /, віднесену до одиниці площі антени, одиниці частотного інтервалу та тілесного куту Розподіл потужності випромінювання по напрямкам неоднаковий для кожної конкретної ситуації (Красненко Н П, Акустическое зондирование атмосферы, Новосибирск, Наука, 1986, С 40-38), при цьому відомо, що у загальному випадку розподіл характеризується значною МІНЛИВІСТЮ, (максимальні значення шуму можуть досягати 100 140дб) До основи винаходу поставлена задача підвищення дальності зондування та точності виміру параметрів атмосфери шляхом випромінювання енергії зондувального сигналу у напрямках 9, ер, для яких рівень ЗОВНІШНІХ перешкод є найменшим Ця задача вирішена наступним чином У способі акустичного зондування атмосфери, що полягає у випромінюванні в атмосферу в довільно вибраному напрямку акустичних синусоїдних коливань та прийомі акустичних коливань, розсіяних на неоднорідностях атмосфери, вимірі параметрів розсіяного сигналу, обчисленні параметрів атмосфери по зміряним значенням параметрів розсіяного сигналу, заздалегідь виробляють аналіз розподілу по напрямкам ЗОВНІШНІХ акустичних перешкод в межах вибраного сектора огляду Визначають оптимальний напрямок, на якому рівень перешкод має найменше значення, та випромінюють у цьому напрямку зондувальні акустичні коливання Рівень та розподіл за напрямками ЗОВНІШНІХ акустичних перешкод характеризуються значною МІНЛИВІСТЮ, що породжується головним чином змінами в домінуючих джерелах шумів та умовами розповсюдження звукових хвиль Спектральна густина потужності ЗОВНІШНІХ перешкод на вході приймальника визначається виразом ^ Л^ (2) Де 9, е -ВІДПОВІДНО кут місця та азимут, 9о еро р значення кутів які визначають положення максимуму головної пелюстки діаграми спрямування антенні акустичного локатора (котрі визначають направлення зондування), F(9,cp,9o,cpo) -діаграма спрямування антени локатора, /о - частота настройки приймальника, S -ефективна площа апертури антени, Як видно з (2), якщо напрямок зондування обрати таким чином, щоб в точці бо, е о спостерігавр ся мінімум функції В(9,ср,/о), то це забезпечить мінімум спектральної густини перешкод на вході приймача і, отже, випромінювання зондувального сигналу у напрямку з найменшим рівнем перешкод дозволяє підвищити імовірність задовільної (по умовам перешкод) роботи і істотно покращити реальну чутливість системи Для оцінки, у конкретній обстановці, коли є перешкоди, функції В(9,ср,/о), що характеризує роз поділ перешкод по напрямкам, може бути використаний спектральний аналіз поля, що спостерігається у розкриві плоскої антенної решітки, в той час коли випромінювання зондувального сигналу не здійснюється У цьому випадку при прийомі на частоті /о коливань від деякого шумового джерела, що характеризується напрямками 8-і, фі, просторові частоти к х і к у і поля що спостерігається в розкриві решітки, вздовж ВІДПОВІДНИХ напрямків х, у горизонтальної площини, є функціями кутів 8-і, фі і К. ї — ' Л 5ІІЇЕ> CQ-iijs , І * Д _ >• _ •— чШ "* SliiW X ' fX\ \^i X Де A - довжина хвилі, відповідна частоті /о Поле U(x,y) що утвориться у розкриві антени внаслідок дії декількох джерел перешкод, є адитивною сумішшю ВІДПОВІДНИХ коливань перешкод Двомірне перетворення Фурьє від поля U(x,y) дозволяє отримати його просторовий спектр -B{>j,Jrv) = \ І [0{х,у)с • * ' * У dx dy (4) Для отримання цієї функції кутового розподілу В(8,ф,/о) необхідно виконати перетворення координат \ ), (5) Рельєф функції В(8,ср,/о) є таким, що у напрямках на джерела перешкод спостерігаються локальні максимуми. Значення 9,ер, ВІДПОВІДНІ глобальному мінімуму (або декільком локальним мінімумам) характеризують напрямки, що доцільно обирати як напрямки зондування, з точки зору рівня перешкод Таким чином, визначення напрямків, ВІДПОВІДНИХ найменшому рівню ЗОВНІШНІХ перешкод і виконання зондування у цих напрямках дозволить істотно покращити реальну чутливість приймача та підвищити імовірність задовільної роботи акустичного локатора у складній обстановці, коли є перешкоди На фігурі зображена структурна схема пристрою, що реалізує запропонований спосіб Пристрій містить приймальну акустичну антенну решітку 1, що містить n=Nx-Ny елементів, ВИХІДНІ сигнали елементів решітки подаються на входи каналів багатоканального приймача 2, з виходів каналів приймача сигнали подаються на входи багатоканального аналого-цифрового перетворювача (АЦП) 3, далі ВИХІДНІ сигнали АЦП передаються до блоку обробки сигналів 4, вихід якого зв'язано з входом блоку 5 синхронізації та управління, один вихід якого зв'язано з АЦП З, другий вихід блоку 5 синхронізації та управління пов'язано з акустичним передавачем 6, третій - з поворотним пристроєм 7 антени, вихід якого пов'язано зі входом приймально-передавальної антени 8, що пов'язано з перемикачем 9 прийомпередача, один вхід якого з'єднано з виходом акустичного передавача 6, другий - з блоком 5 синхронізації та управління, а вихід перемикача 9 прийом-передача, з'єднано з входом вузькосмужного приймача 10, вхід якого зв'язано з виходом блоку 5 синхронізації та управління, а вихід з входом блоку 11 виміру параметрів сигналів, другий вхід якого з'єднано з виходом блоку 5 синхронізації та управління, а вихід зв'язано з входом блоку 12 обчислення параметрів атмосфери Пристрій працює наступним чином Акустичні перешкоди які опромінюють акустичну антенну решітку, створюють у ній поле розподілу рівнів звукового тиску U(x,y) Вихідним сигналом кожного елемента решітки 1 є напруга, величина якої пропорційна значенню поля у ВІДПОВІДНІЙ ТОЧЦІ апертури Таким чином, реалізується дискретизація поля антени у просторі Сигнали з виходів акустичної антенної решітки потрапляють на входи n-канального приймача 2, який здійснює, попереднє підсилення та фільтрування сигналу для забезпечення роботи на фіксованій частоті, далі з виходів приймача сигнали находять на входи n-канального АЦП 3, який здійснює перетворення аналогових сигналів елементів антени у цифровий код Сигнали на виходах пканального АЦП 3 являють собою цифрові ПОСЛІДОВНОСТІ значень поля U(x,y) у розкриві решітки, що отрималися внаслідок дії перешкод причому у кожному з n-каналів передаються значення поля у конкретній крапці апертури решітки Синхросигнали n-канального АЦП виробляються блоком управління та синхронізації 5 46160 антени 7, встановлює антену на оптимальний напрямок По сигналу з блоку 5 синхронізації та управління перемикач 9 прийом-передача вмикає приймально-передавальну антену 4 до акустичного передавача 6 на час випромінювання зондувального сигналу, а після цього до приймача 10 для прийому розсіяних сигналів Після цього по сигналу з блоку 5 акустичний передавач 6 виробляє зондувальний імпульс (у напрямку найменших ЗОВНІШНІХ перешкод), що через перемикач 9 прийом-передача надходить до приймальнопередавальної антени 8 та випромінюється у простір Акустичний сигнал, розсіяний на неоднорідностях атмосфери, надходить у приймальнопередавальну антену 8 та через перемикач 9 прийом-передача надходить до приймача вузькосмужного 10, де він обробляється та посилюється У блоці 11 виміру параметрів сигналу здійснюється вимір інформативних параметрів корисного сигналу (наприклад амплітуди, доплерівської частоти) та у блоку 12 обчислення параметрів атмосфери, по зміряним значенням параметрів сигналу визначаються параметри атмосфери (наприклад, швидкість та напрямок вітру) Далі проводиться наступний вимір зовнішнього розподілу перешкод та цикл повторюється Для здійснення даного способу, до відомої схеми пристрою було потрібно ввести чотири додаткових блоку - приймальну акустичну решітку 1, n-канальний вузькосмужний приймальник 2, пканальний АЦП блок обробки сигналів 4 Використовується стандартне обладнання Як бачимо, на відзнаку від прототипу, де випромінювання та прийом коливань здійснюють у довільному напрямку, у винаході, що пропонується, як робітничі напрямки обирають ті напрямки, у яких рівень перешкод має найменше значення По синхросигналу блоку 5 синхронізації та управління сигнали з виходів n-канального АЦП З передаються до блоку обробки сигналів 4, де виробляється спектральний аналіз миттєвих значень поля у розкриві решітки та обчислюється розподіл по напрямкам ЗОВНІШНІХ акустичних перешкод на частоті роботи пристрою Ця інформація надходить до блоку 5 синхронізації та управління, де визначається напрямок, на якому рівень перешкод має найменше значення Далі по сигналу з блоку 5 синхронізації та управління, поворотний пристрій Акустична антенна решітка І ІІ іиканальннй і "і Поворотний пристрій антенн г~ Приймально- 8 передавальна антена Т АКУСТИЧНИЙ б передавач ву ІЬ !Ш»;м ужй нк -передача 9 приймач , і «І 1 1 Н і Н-КШШЛЬШІЙ 3 АЦП Блок 4 t г і 4-. . Прнннач 10 вузькосм ужн нй Блок З синхронізації тя упракшння Елок 12 обчислення парам етрю Блок І І Виміру параметрів 46160 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна (044) 456 - 20 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71
ДивитисяДодаткова інформація
Автори англійськоюKartashov Volodymyr Mykhailovych
Автори російськоюКарташов Владимир Михайлович
МПК / Мітки
Мітки: акустичного, атмосфери, зондування, спосіб
Код посилання
<a href="https://ua.patents.su/4-46160-sposib-akustichnogo-zonduvannya-atmosferi.html" target="_blank" rel="follow" title="База патентів України">Спосіб акустичного зондування атмосфери</a>
Спосіб дистанційного вимірювання відносних змін температури повітря за допомогою акустичного зондування атмосфери
Номер патенту: 46524
Опубліковано: 15.05.2002
Автори: Сліпченко Микола Іванович, Дєлов Іван Акіндінович
МПК: G01S 13/00, G01S 13/95
Мітки: акустичного, дистанційного, зондування, відносних, повітря, змін, атмосфери, температури, вимірювання, спосіб, допомогою
Формула / Реферат:
Спосіб дистанційного вимірювання відносних змін температури повітря за допомогою акустичного зондування атмосфери, що включає випромінювання в атмосферу пакета гармонійних коливань повітря, його прийом, перетворення прийнятих звукових коливань в електричні, визначення швидкості звуку, визначення температури, який відрізняється тим, що здійснюють моностатичне зондування атмосфери вертикально чи під кутом до обрію, причому прийом розсіяних...
Пристрій для радіоакустичного зондування атмосфери
Номер патенту: 46150
Опубліковано: 15.05.2002
Автори: Бєдін Віктор Савович, Бутакова Світлана Вікторівна, Бусловський Сергій Федорович, Ульянов Юрій Миколайович
МПК: G01S 13/95
Мітки: радіоакустичного, атмосфери, пристрій, зондування
Формула / Реферат:
Пристрій для радіоакустичного зондування атмосфери, що містить комбіновану радіоакустичну антенну систему, розташовану на поверхні Землі, акустичний передавач і доплерівський радіолокатор, який містить антенний комутатор, імпульсний радіопередавач, радіоприймач, блок обробки інформації, до якого підключено індикатор метеовеличин, який відрізняється тим, що антенна система виконана у вигляді кільцевої антенної решітки з числом елементів,...
Спосіб зондування електричних параметрів в шарах атмосфери і іоносфери
Номер патенту: 35330
Опубліковано: 15.03.2001
Автор: Мельник Володимир Федорович
Мітки: електричних, спосіб, параметрів, шарах, атмосфери, іоносфери, зондування
Формула / Реферат:
Спосіб зондування електричних параметрів в шарах атмосфери і іоносфери шляхом підіймання на необхідну висоту, наприклад, з допомогою стратосферних куль, зонда з датчиком, із якого сигнали поступають до реєструючої апаратури, який відрізняється тим, що реєструючу апаратуру розташовують на земній поверхні, в якості датчика використовують об'ємний електрод у вигляді електропровідної оболонки кулеподібного зонда, яку з'єднують безпосередньо з...
Спосіб акустичного впливу на нафтогазоносний пласт
Номер патенту: 42385
Опубліковано: 15.10.2001
Автори: Казанцев Юрій Вікторович, Бугай Юрій Миколайович, Казанцев Віктор Михайлович, Фролагін Володимир Олександрович, Балакіров Юрій Айрапетович
МПК: E21B 43/25, E21B 28/00
Мітки: нафтогазоносний, впливу, акустичного, спосіб, пласт
Формула / Реферат:
Спосіб акустичного впливу на нафтогазоносний пласт, що включає діагностику привибійної зони, опромінювання коловим горизонтально направленим полем з утворенням швидкої хвилі, який відрізняється тим, що при розробці родовища попередньо проводять діагностику привибійної зони близьких видобувних свердловин, джерело акустичного впливу розміщують на рівні залягання продуктивного пласта у нагнітальній свердловині, яка розміщена всередині контуру...
Вимірювач нелінійності акустичного тракту
Номер патенту: 42857
Опубліковано: 15.11.2001
Автори: Лісовець Сергій Миколайович, Скрипник Юрій Олексійович
МПК: G01N 29/11, G01N 29/22
Мітки: тракту, нелінійності, вимірювач, акустичного
Формула / Реферат:
Вимірювач нелінійності акустичного тракту, який містить генератор електричних коливань, перший та другий автоматичні перемикачі, перший та другий подільники напруги, перший амплітудний детектор, перший та другий фільтри нижніх частот, перший широкосмуговий підсилювач з регульованим коефіцієнтом підсилення, підсилювач змінної напруги, фазочутливий випрямляч, вимірювач напруги, подільник частоти, джерело опірної напруги, диференціальний...
Попередній патент: Система пожежозаглушення бронемашини
Наступний патент: Пристрій формування модульованої завади оптико-електронним приладам
Випадковий патент: Пристрій для інвалідної коляски