Пристрій для діагностики асинхронних двигунів з короткозамкненим ротором
Номер патенту: 49334
Опубліковано: 16.09.2002
Автори: Родькін Дмитро Йосипович, Чорний Олексій Петрович, Барвінок Дмитро Володимирович, Панченко Максим Вікторович, Огарь Олександр Сергійович
Формула / Реферат
1. Пристрій для діагностики параметрів асинхронних двигунів з короткозамкненим ротором, що містить тиристорний регулятор напруги з комутуючим апаратом на вході, первинними датчиками миттєвих значень напруги і струму на вході асинхронного двигуна, обчислювальний блок для визначення параметрів асинхронного двигуна, який відрізняється тим, що він додатково оснащений трифазним тиристорним регулятором напруги з індивідуальним цифровим керуванням для кожного із шести тиристорів, цифровою системою керування шістьма тиристорними модулями регулятора напруги, блоком датчиків струму фаз з цифровим незалежним регулюванням коефіцієнта передачі датчиків струму, блоком датчиків напруги з цифровим регулюванням коефіцієнта передачі датчиків напруги, контролером нижнього рівня з вісьма аналоговими, двома цифровими входами-виходами, одним цифровим виходом, блоком захисту з цифровим завданням рівнів і уставок захисту, шістьма аналоговими входами і двома аналоговими виходами, аналого-цифровим перетворювачем із шістьма аналоговими входами й одним цифровим входом-виходом, причому три аналогових виходи блока датчиків струму зв'язані четвертим, п'ятим і шостим входами контролера нижнього рівня, четвертим, п'ятим і шостим аналоговими входами блока захисту, другим, третім і четвертим входами аналого-цифрового перетворювача, четвертий цифровий вхід блока датчиків напруги зв'язано з десятим цифровим виходом обчислювального блока нижнього рівня, виходи первинних датчиків струму зв'язано з аналоговими входами блока датчиків струму, третій, сьомий і десятий виходи блока датчиків напруги зв'язані з першим, другим і третім аналоговими входами контролера нижнього рівня, п'ятим, шостим і сьомим входами аналогового цифрового перетворювача, першим, другим і третім аналоговими входами блока захисту, четвертий цифровий вхід блока датчиків напруги зв'язаний з дев'ятим цифровим виходом контролера нижнього рівня, десятий вихід блока захисту зв'язаний з котушкою, що відключає комутуючий апарат, сьомий вхід-вихід блока захисту зв'язаний з восьмим входом-виходом обчислювального блока нижнього рівня і першим входом цифрової системи імпульсно-фазового керування, сигнал із блока-контакта комутуючого апарата зв'язаний із дванадцятим входом контролера нижнього рівня і восьмим входом блока захисту, перший цифровий вхід-вихід обчислювального блока верхнього рівня зв'язаний із сьомим цифровим входом-виходом обчислювального блока нижнього рівня, перший цифровий вхід-вихід блока аналогового цифрового перетворення зв'язаний із другим цифровим входом-виходом обчислювального блока верхнього рівня, що синхронізують восьмий, дев'ятий і десятий входи цифрової системи керування, тиристорним модулем зв'язані з фазами А,В,С трифазної мережі.
2. Пристрій для діагностики параметрів асинхронних двигунів з короткозамкненим ротором за п.1, який відрізняється тим, що датчики напруги та струму керуються не по незалежних цифрових шинах 4, зв'язаних з виходами контролера нижнього рівня 9 та 10, а керуються по загальній двонаправленій цифровій шині, що зв'язана з входом-виходом 8 контролера нижнього рівня, входом-виходом 7 блока захисту, входом-виходом 1.
Текст
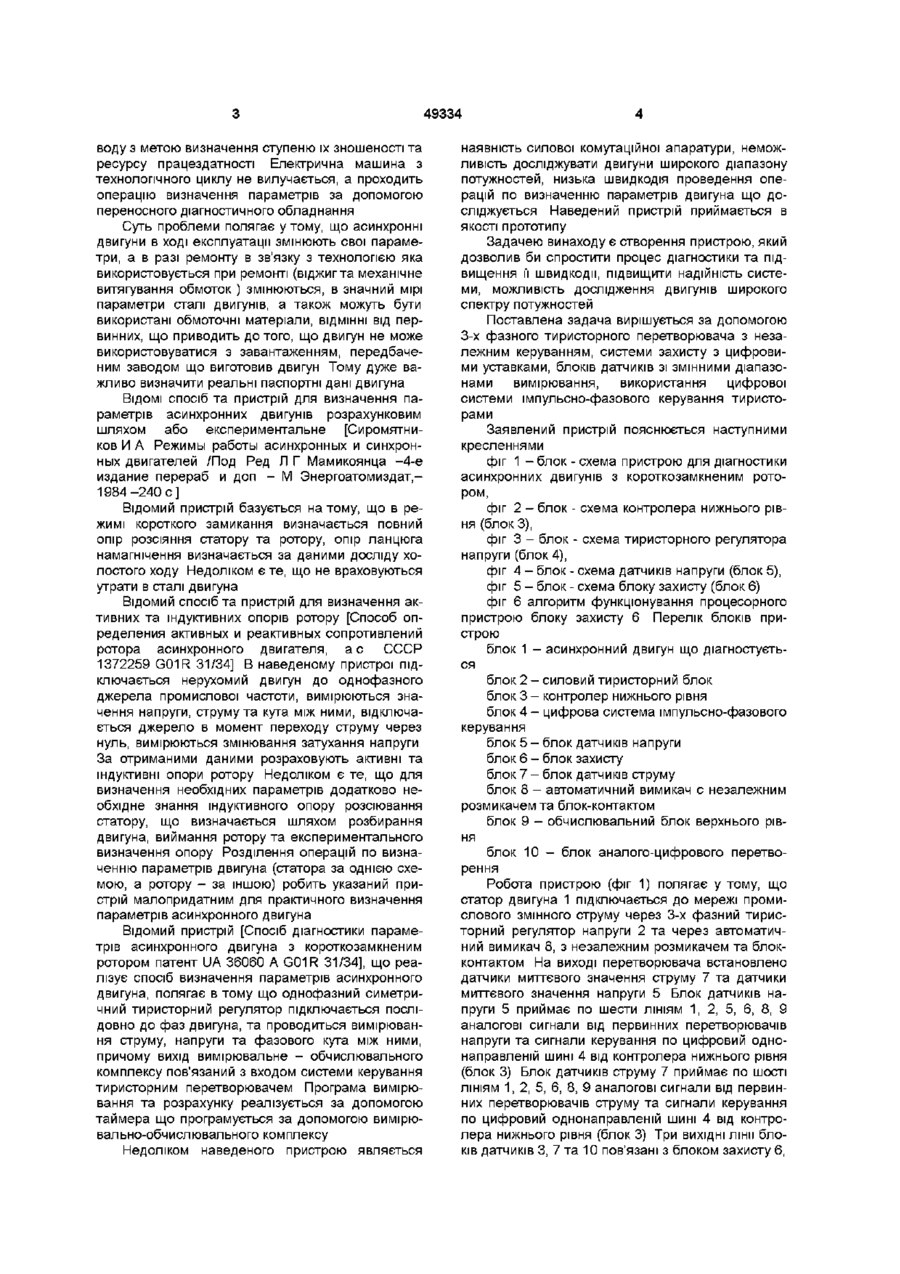
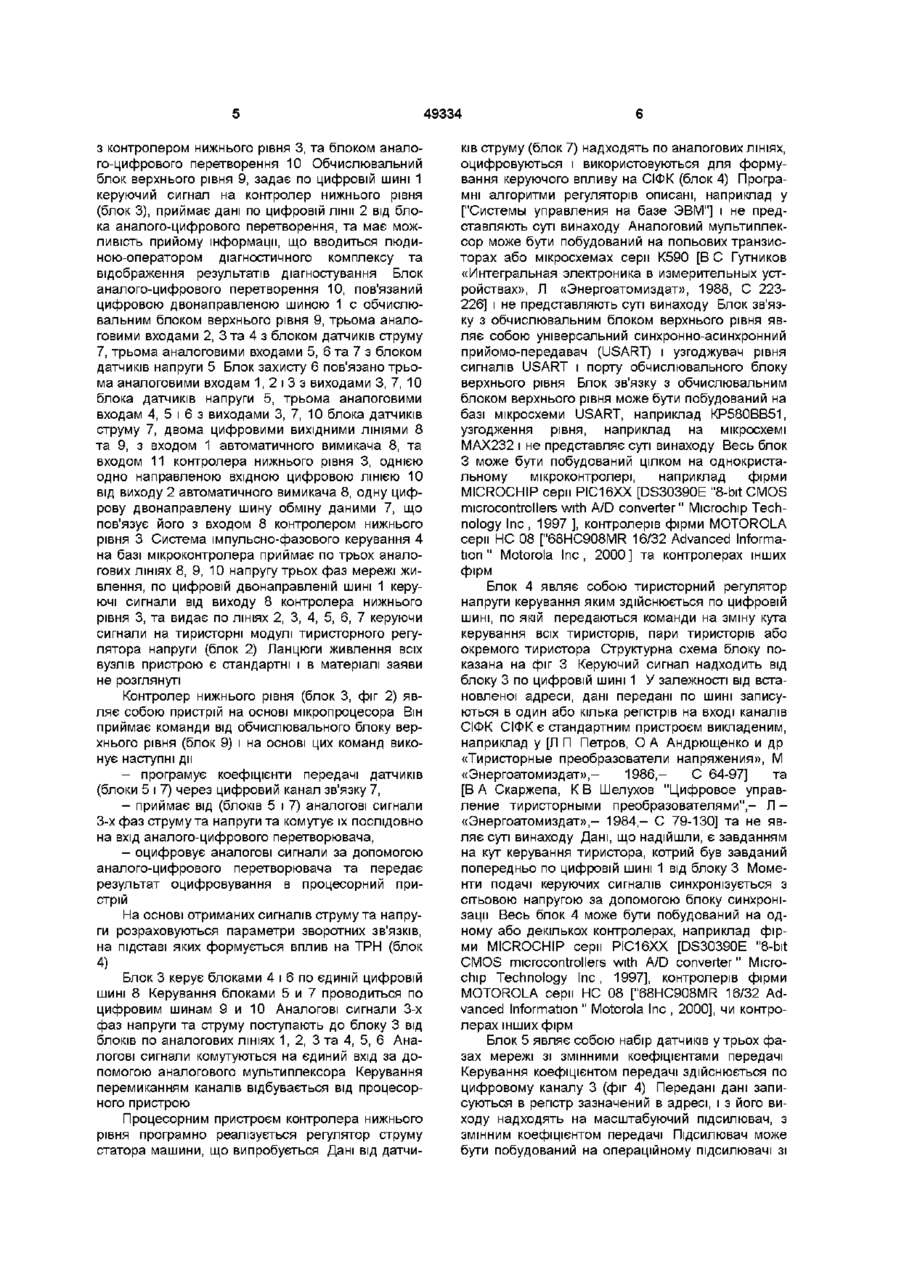
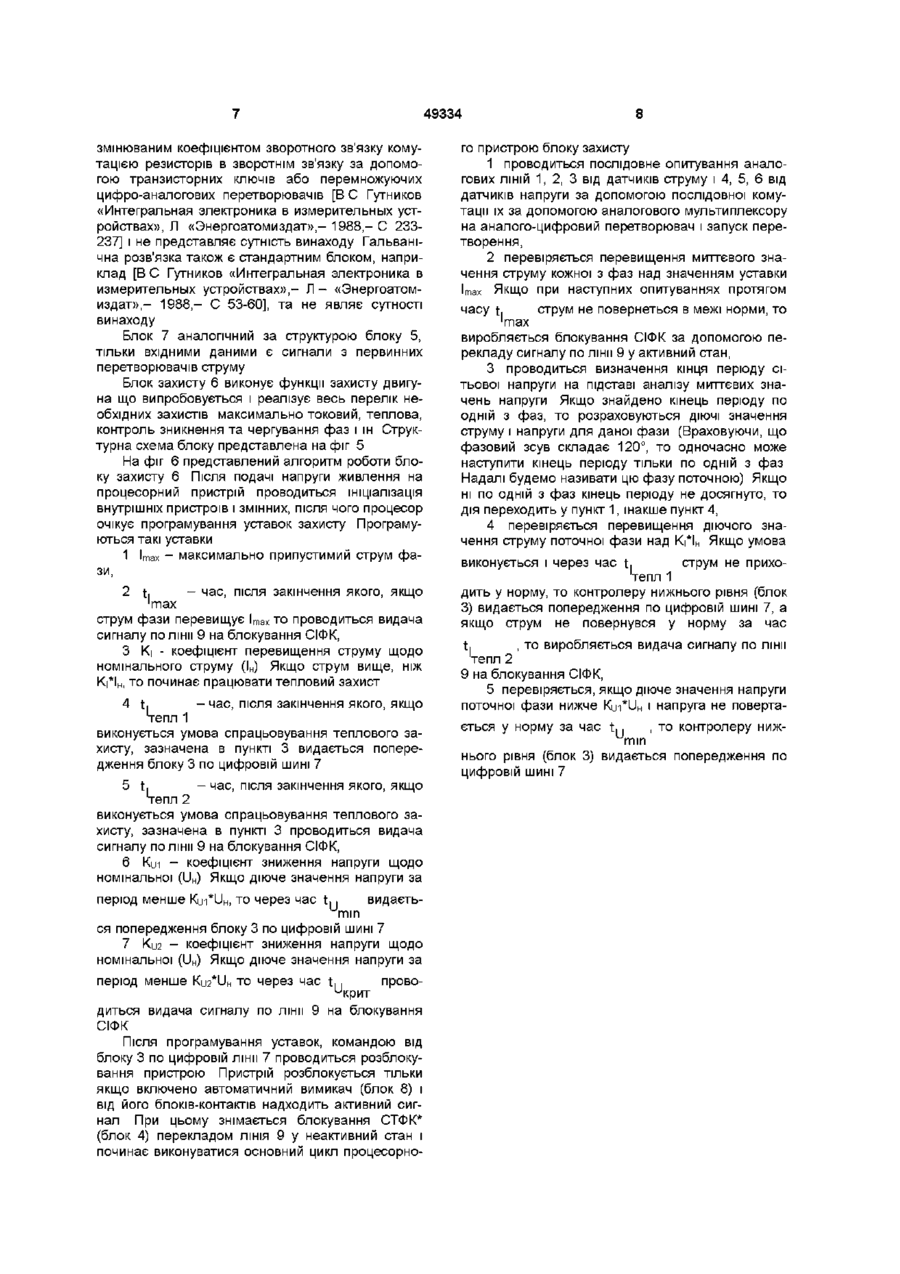
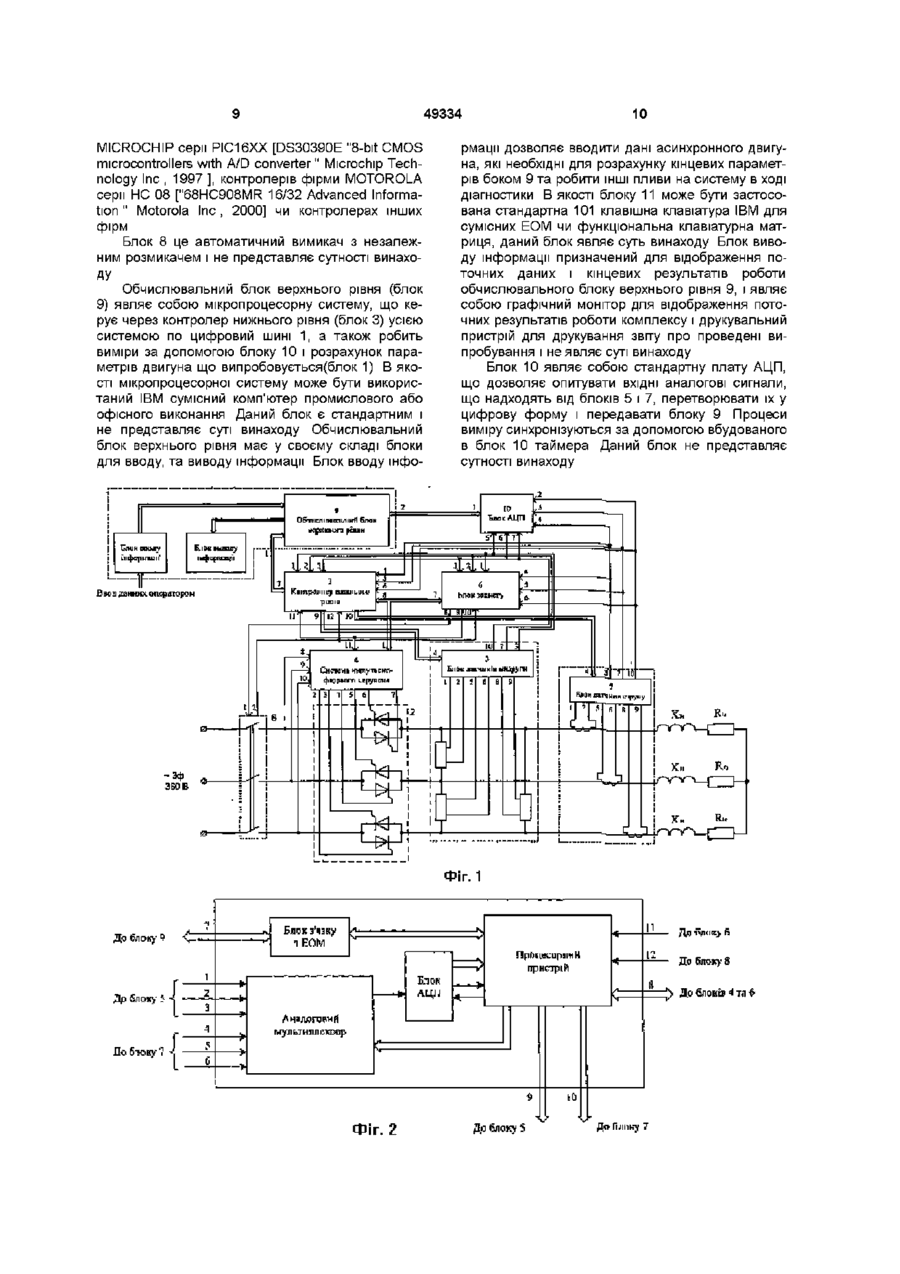
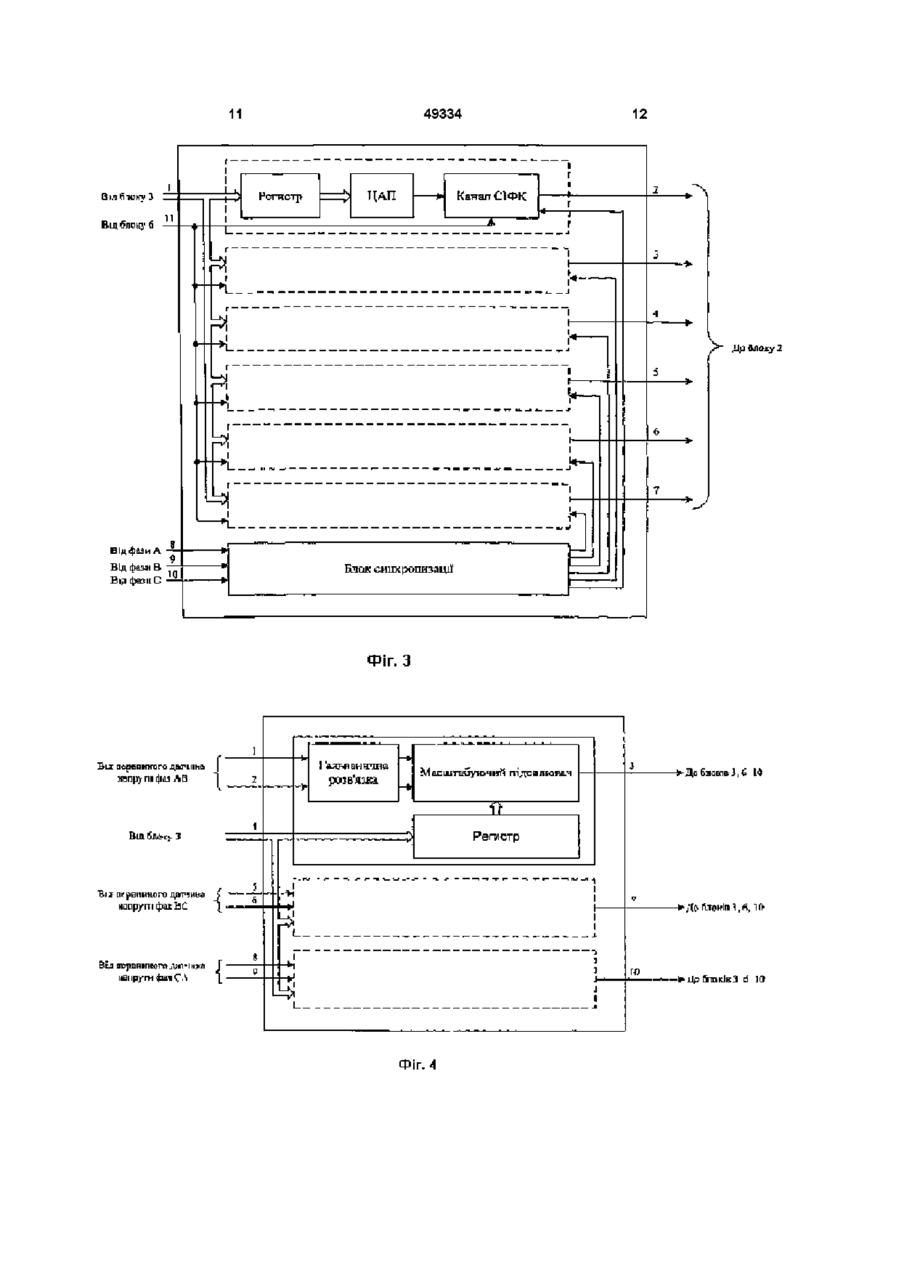
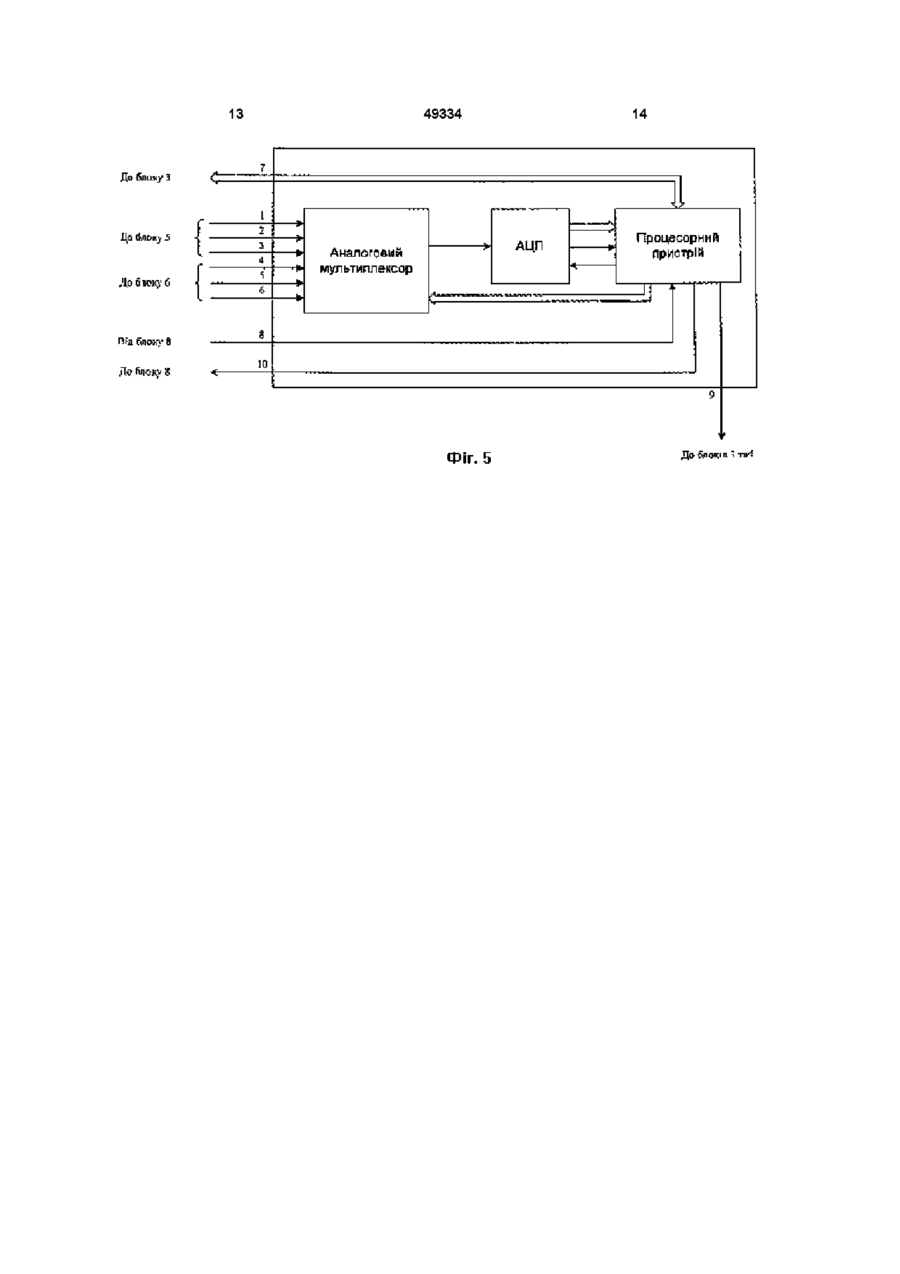
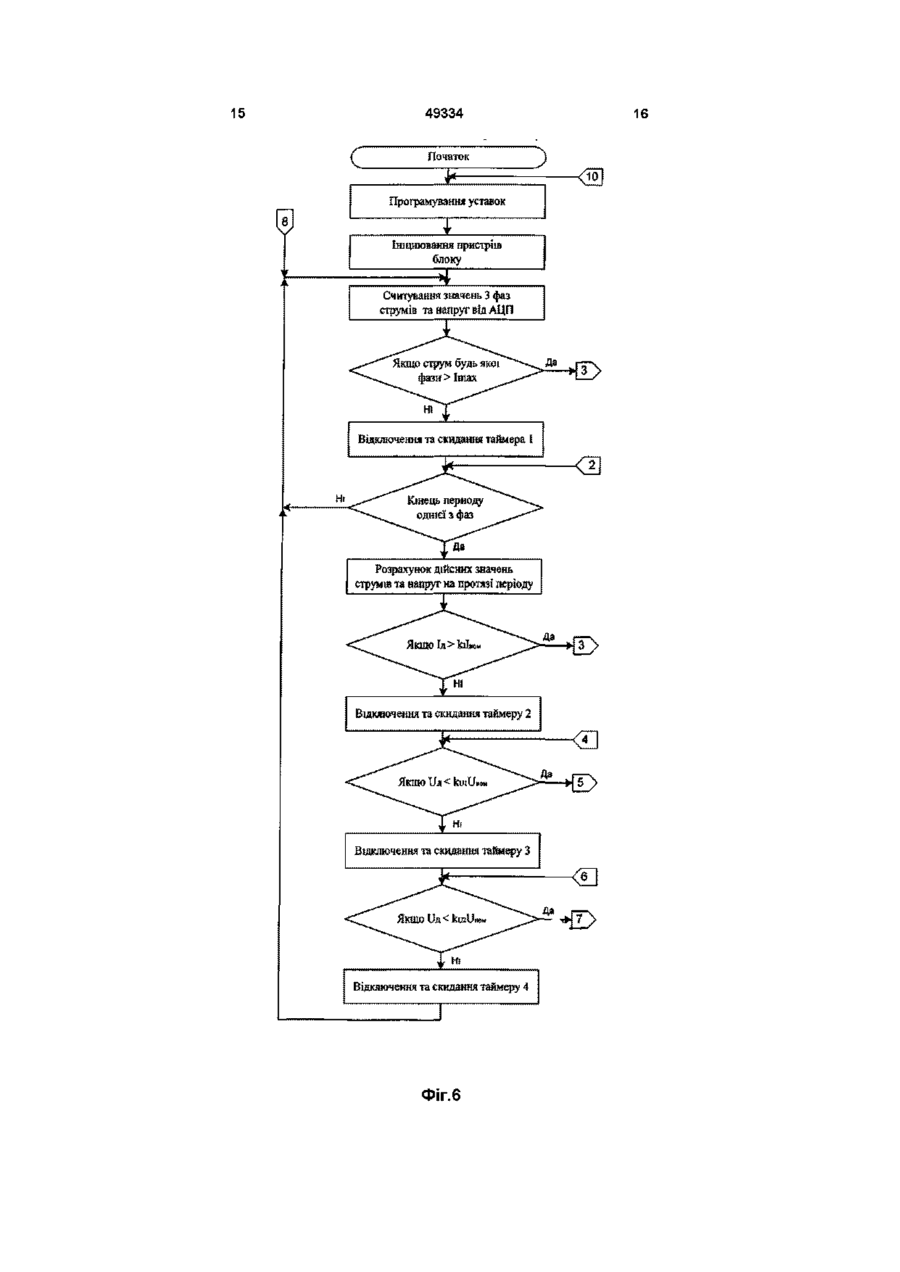
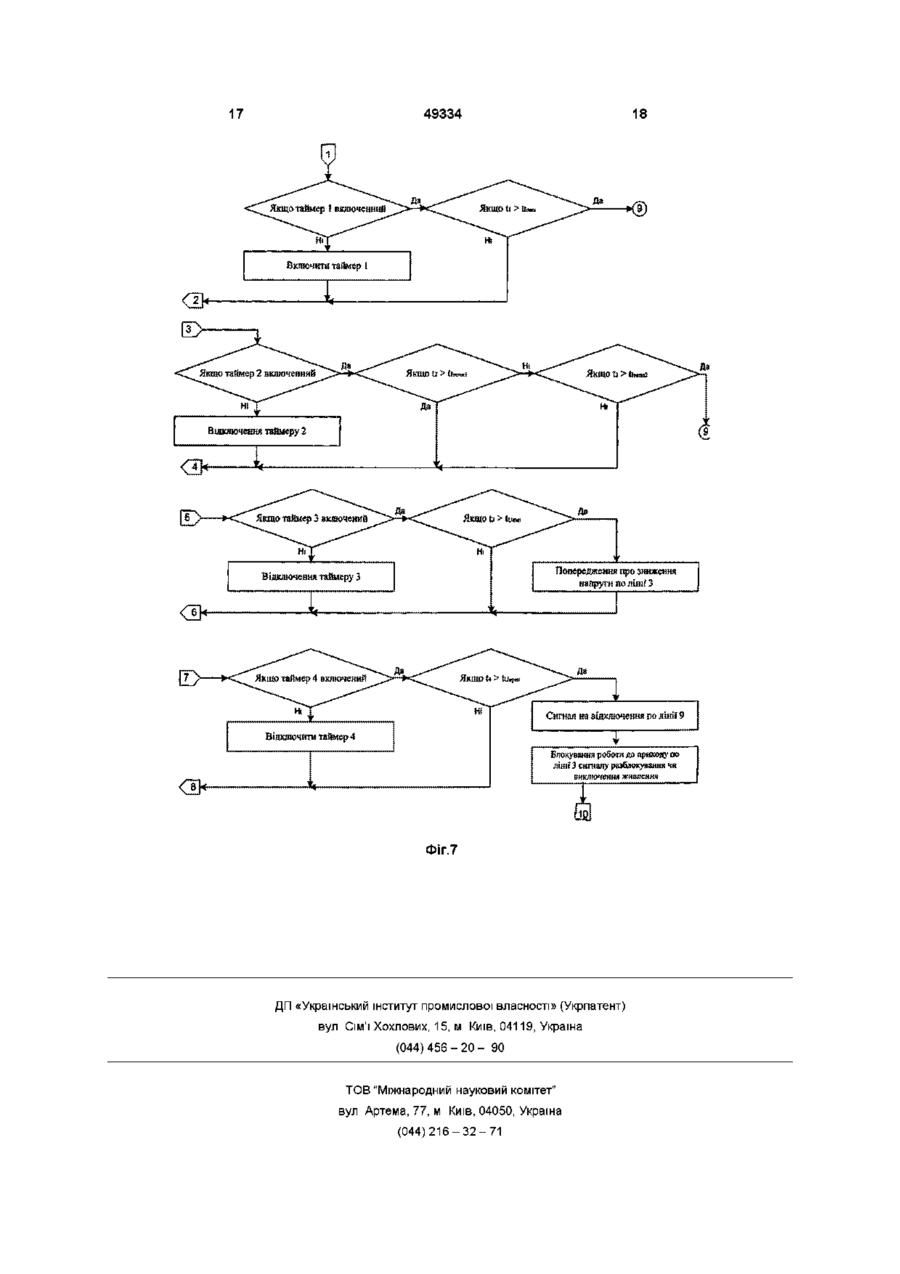
1 Пристрій для діагностики параметрів асинхронних двигунів з короткозамкненим ротором, що містить тиристорний регулятор напруги з комутуючим апаратом на вході, первинними датчиками миттєвих значень напруги і струму на вході асинхронного двигуна, обчислювальний блок для визначення параметрів асинхронного двигуна, який відрізняється тим, що він додатково оснащений трифазним тиристорним регулятором напруги з індивідуальним цифровим керуванням для кожного із шести тиристорів, цифровою системою керування шістьма тиристорними модулями регулятора напруги, блоком датчиків струму фаз з цифровим незалежним регулюванням коефіцієнта передачі датчиків струму, блоком датчиків напруги з цифровим регулюванням коефіцієнта передачі датчиків напруги, контролером нижнього рівня з вісьма аналоговими, двома цифровими входамивиходами, одним цифровим виходом, блоком захисту з цифровим завданням рівнів і уставок захисту, шістьма аналоговими входами і двома аналоговими виходами, аналого-цифровим перетворювачем із шістьма аналоговими входами й одним цифровим входом-виходом, причому три аналогових виходи блока датчиків струму зв'язані четвертим, п'ятим і шостим входами контролера нижнього рівня, четвертим, п'ятим і шостим аналоговими входами блока захисту, другим, третім і четвертим входами аналого-цифрового перетворювача, четвертий цифровий вхід блока датчиків напруги зв'язано з десятим цифровим виходом обчислювального блока нижнього рівня, виходи первинних датчиків струму зв'язано з аналоговими входами блока датчиків струму, третій, сьомий і десятий виходи блока датчиків напруги зв'язані з першим, другим і третім аналоговими входами контролера нижнього рівня, п'ятим, шостим і сьомим входами аналогового цифрового перетворювача, першим, другим і третім аналоговими входами блока захисту, четвертий цифровий вхід блока датчиків напруги зв'язаний з дев'ятим цифровим виходом контролера нижнього рівня, десятий вихід блока захисту зв'язаний з котушкою, що відключає комутуючий апарат, сьомий ВХІД-ВИХІД блока захисту зв'язаний з восьмим входомвиходом обчислювального блока нижнього рівня і першим входом цифрової системи імпульснофазового керування, сигнал із блока-контакта комутуючого апарата зв'язаний із дванадцятим входом контролера нижнього рівня і восьмим входом блока захисту, перший цифровий ВХІД-ВИХІД обчислювального блока верхнього рівня зв'язаний із сьомим цифровим входом-виходом обчислювального блока нижнього рівня, перший цифровий вхідвихід блока аналогового цифрового перетворення зв'язаний із другим цифровим входом-виходом обчислювального блока верхнього рівня, що синхронізують восьмий, дев'ятий і десятий входи цифрової системи керування, тиристорним модулем зв'язані з фазами А,В,С трифазної мережі 2 Пристрій для діагностики параметрів асинхронних двигунів з короткозамкненим ротором за п 1, який відрізняється тим, що датчики напруги та струму керуються не по незалежних цифрових шинах 4, зв'язаних з виходами контролера нижнього рівня 9 та 10, а керуються по загальній двонаправленій цифровій шині, що зв'язана з входомвиходом 8 контролера нижнього рівня, входомвиходом 7 блока захисту, входом-виходом 1 Винахід відноситься до галузі електротехніки та може бути використаний на електроремонтних підприємствах в електроремонтній практиці ви пробування двигунів, що пройшли ремонт та в умовах промислових підприємств для експлуатаційного моніторингу електродвигунів систем при СО го 49334 воду з метою визначення ступеню їх зношеності та ресурсу працездатності Електрична машина з технологічного циклу не вилучається, а проходить операцію визначення параметрів за допомогою переносного діагностичного обладнання Суть проблеми полягає утому, що асинхронні двигуни в ході експлуатації змінюють свої параметри, а в разі ремонту в зв'язку з технологією яка використовується при ремонті (віджигта механічне витягування обмоток ) змінюються, в значний мірі параметри сталі двигунів, а також можуть бути використані обмоточні матеріали, ВІДМІННІ ВІД первинних, що приводить до того, що двигун не може використовуватися з завантаженням, передбаченим заводом що виготовив двигун Тому дуже важливо визначити реальні паспортні дані двигуна ВІДОМІ спосіб та пристрій для визначення параметрів асинхронних двигунів розрахунковим шляхом або експериментальне [Сиромятников И А Режимы работы асинхронных и синхронных двигателей /Под Ред Л Г Мамикоянца -4-е издание перераб и доп - М Энергоатомиздат,1984-240 с ] Відомий пристрій базується на тому, що в режимі короткого замикання визначається повний опір розсіяння статору та ротору, опір ланцюга намагнічення визначається за даними досліду холостого ходу Недоліком є те, що не враховуються утрати в сталі двигуна Відомий спосіб та пристрій для визначення активних та індуктивних опорів ротору [Способ определения активных и реактивных сопротивлений ротора асинхронного двигателя, а с СССР 1372259 G01R 31/34] В наведеному пристрої підключається нерухомий двигун до однофазного джерела промислової частоти, вимірюються значення напруги, струму та кута між ними, відключається джерело в момент переходу струму через нуль, вимірюються змінювання затухання напруги За отриманими даними розраховують активні та індуктивні опори ротору Недоліком є те, що для визначення необхідних параметрів додатково необхідне знання індуктивного опору розсіювання статору, що визначається шляхом розбирання двигуна, виймання ротору та експериментального визначення опору Розділення операцій по визначенню параметрів двигуна (статора за однією схемою, а ротору - за іншою) робить указаний пристрій малопридатним для практичного визначення параметрів асинхронного двигуна Відомий пристрій [Спосіб діагностики параметрів асинхронного двигуна з короткозамкненим ротором патент UA 36060 A G01R 31/34], що реалізує спосіб визначення параметрів асинхронного двигуна, полягає в тому що однофазний симетричний тиристорний регулятор підключається послідовно до фаз двигуна, та проводиться вимірювання струму, напруги та фазового кута між ними, причому вихід вимірювальне - обчислювального комплексу пов'язаний з входом системи керування тиристорним перетворювачем Програма вимірювання та розрахунку реалізується за допомогою таймера що програмується за допомогою вимірювально-обчислювального комплексу Недоліком наведеного пристрою являється наявність силової комутаційної апаратури, неможливість досліджувати двигуни широкого діапазону потужностей, низька швидкодія проведення операцій по визначенню параметрів двигуна що досліджується Наведений пристрій приймається в якості прототипу Задачею винаходу є створення пристрою, який дозволив би спростити процес діагностики та підвищення її швидкодії, підвищити надійність системи, можливість дослідження двигунів широкого спектру потужностей Поставлена задача вирішується за допомогою 3-х фазного тиристорного перетворювача з незалежним керуванням, системи захисту з цифровими уставками, блоків датчиків зі змінними діапазонами вимірювання, використання цифрової системи імпульсно-фазового керування тиристорами Заявлений пристрій пояснюється наступними кресленнями фіг 1 - блок - схема пристрою для діагностики асинхронних двигунів з короткозамкненим ротором, фіг 2 - блок - схема контролера нижнього рівня (блок 3), фіг 3 - блок - схема тиристорного регулятора напруги (блок 4), фіг 4 - блок - схема датчиків напруги (блок 5), фіг 5 - блок - схема блоку захисту (блок 6) фіг 6 алгоритм функціонування процесорного пристрою блоку захисту 6 Перелік блоків пристрою блок 1 - асинхронний двигун що діагностується блок 2 - силовий тиристорний блок блок 3 - контролер нижнього рівня блок 4 - цифрова система імпульсно-фазового керування блок 5 - блок датчиків напруги блок 6 - блок захисту блок 7 - блок датчиків струму блок 8 - автоматичний вимикач с незалежним розмикачем та блок-контактом блок 9 - обчислювальний блок верхнього рівня блок 10 - блок аналого-цифрового перетворення Робота пристрою (фіг 1) полягає у тому, що статор двигуна 1 підключається до мережі промислового змінного струму через 3-х фазний тиристорний регулятор напруги 2 та через автоматичний вимикач 8, з незалежним розмикачем та блокконтактом На виході перетворювача встановлено датчики миттєвого значення струму 7 та датчики миттєвого значення напруги 5 Блок датчиків напруги 5 приймає по шести ЛІНІЯМ 1, 2, 5, 6, 8, 9 аналогові сигнали від первинних перетворювачів напруги та сигнали керування по цифровий однонаправленій шині 4 від контролера нижнього рівня (блок 3) Блок датчиків струму 7 приймає по шості ЛІНІЯМ 1, 2, 5, 6, 8, 9 аналогові сигнали від первинних перетворювачів струму та сигнали керування по цифровий однонаправленій шині 4 від контролера нижнього рівня (блок 3) Три ВИХІДНІ лінії блоків датчиків 3, 7 та 10 пов'язані з блоком захисту 6, 49334 з контролером нижнього рівня 3, та блоком аналого-цифрового перетворення 10 Обчислювальний блок верхнього рівня 9, задає по цифровій шині 1 керуючий сигнал на контролер нижнього рівня (блок 3), приймає дані по цифровій лінії 2 від блока аналого-цифрового перетворення, та має можливість прийому інформації, що вводиться людиною-оператором діагностичного комплексу та відображення результатів діагностування Блок аналого-цифрового перетворення 10, пов'язаний цифровою двонаправленою шиною 1 с обчислювальним блоком верхнього рівня 9, трьома аналоговими входами 2, 3 та 4 з блоком датчиків струму 7, трьома аналоговими входами 5, 6 та 7 з блоком датчиків напруги 5 Блок захисту 6 пов'язано трьома аналоговими входам 1, 2 і 3 з виходами 3, 7, 10 блока датчиків напруги 5, трьома аналоговими входам 4, 5 і 6 з виходами 3, 7, 10 блока датчиків струму 7, двома цифровими вихідними ЛІНІЯМИ 8 та 9, з входом 1 автоматичного вимикача 8, та входом 11 контролера нижнього рівня 3, однією одно направленою вхідною цифровою ЛІНІЄЮ 10 від виходу 2 автоматичного вимикача 8, одну цифрову двонаправлену шину обміну даними 7, що пов'язує його з входом 8 контролером нижнього рівня 3 Система імпульсно-фазового керування 4 на базі мікроконтролера приймає по трьох аналогових ЛІНІЯХ 8, 9, 10 напругу трьох фаз мережі живлення, по цифровій двонаправленій шині 1 керуючі сигнали від виходу 8 контролера нижнього рівня 3, та видає по ЛІНІЯХ 2, 3, 4, 5, 6, 7 керуючи сигнали на тиристорні модулі тиристорного регулятора напруги (блок 2) Ланцюги живлення всіх вузлів пристрою є стандартні і в матеріалі заяви не розглянуті Контролер нижнього рівня (блок 3, фіг 2) являє собою пристрій на основі мікропроцесора Він приймає команди від обчислювального блоку верхнього рівня (блок 9) і на основі цих команд виконує наступні дії - програмує коефіцієнти передачі датчиків (блоки 5 і 7) через цифровий канал зв'язку 7, - приймає від (блоків 5 і 7) аналогові сигнали 3-х фаз струму та напруги та комутує їх послідовно на вхід аналого-цифрового перетворювача, - оцифровує аналогові сигнали за допомогою аналого-цифрового перетворювача та передає результат оцифровування в процесорний пристрій На основі отриманих сигналів струму та напруги розраховуються параметри зворотних зв'язків, на підставі яких формується вплив на ТРН (блок 4) Блок 3 керує блоками 4 і 6 по єдиній цифровій шині 8 Керування блоками 5 и 7 проводиться по цифровим шинам 9 и 10 Аналогові сигнали 3-х фаз напруги та струму поступають до блоку 3 від блоків по аналогових ЛІНІЯХ 1, 2, 3 та 4, 5, 6 Аналогові сигнали комутуються на єдиний вхід за допомогою аналогового мультиплексора Керування перемиканням каналів відбувається від процесорного пристрою Процесорним пристроєм контролера нижнього рівня програмно реалізується регулятор струму статора машини, що випробується Дані від датчи ків струму (блок 7) надходять по аналогових ЛІНІЯХ, оцифровуються і використовуються для формування керуючого впливу на СІФК (блок 4) Програмні алгоритми регуляторів описані, наприклад у ["Системы управления на базе ЭВМ"] і не представляють суті винаходу Аналоговий мультиплексор може бути побудований на польових транзисторах або мікросхемах серп К590 [В С Путников «Интегральная электроника в измерительных устройствах», Л «Энергоатомиздат», 1988, С 223226] і не представляють суті винаходу Блок зв'язку з обчислювальним блоком верхнього рівня являє собою універсальний синхронно-асинхронний прийомо-передавач (USART) і узгоджувач рівня сигналів USART і порту обчислювального блоку верхнього рівня Блок зв'язку з обчислювальним блоком верхнього рівня може бути побудований на базі мікросхеми USART, наприклад КР580ВВ51, узгодження рівня, наприклад на мікросхемі МАХ232 і не представляє суті винаходу Весь блок З може бути побудований цілком на однокристальному мікроконтролері, наприклад фірми MICROCHIP серії РІС16ХХ [DS30390E "8-bit CMOS microcontrollers with A/D converter" Microchip Technology Inc , 1997 ], контролерів фірми MOTOROLA серп НС 08 ["68HC908MR 16/32 Advanced Information " Motorola Inc, 2000] та контролерах інших фірм Блок 4 являє собою тиристорний регулятор напруги керування яким здійснюється по цифровій шині, по якій передаються команди на зміну кута керування всіх тиристорів, пари тиристорів або окремого тиристора Структурна схема блоку показана на фіг 3 Керуючий сигнал надходить від блоку 3 по цифровій шині 1 У залежності від встановленої адреси, дані передані по шині записуються в один або кілька регістрів на вході каналів СІФК СІФК є стандартним пристроєм викладеним, наприклад у [Л П Петров, О А Андрющенко и др «Тиристорные преобразователи напряжения», М «Энергоатомиздат»,1986,С 64-97] та [В А Скаржепа, К В Шелухов "Цифровое управление тиристорными преобразователями",- Л «Энергоатомиздат»,- 1984,- С 79-130] та не являє суті винаходу Дані, що надійшли, є завданням на кут керування тиристора, котрий був завданий попередньо по цифровій шині 1 від блоку 3 Моменти подачі керуючих сигналів синхронізується з сітьовою напругою за допомогою блоку синхронізації Весь блок 4 може бути побудований на одному або декількох контролерах, наприклад фірми MICROCHIP серії РІС16ХХ [DS30390E "8-bit CMOS microcontrollers with A/D converter" Microchip Technology Inc, 1997], контролерів фірми MOTOROLA серп НС 08 ["68HC908MR 16/32 Advanced Information " Motorola Inc , 2000], чи контролерах інших фірм Блок 5 являє собою набір датчиків у трьох фазах мережі зі змінними коефіцієнтами передачі Керування коефіцієнтом передачі здійснюється по цифровому каналу 3 (фіг 4) Передані дані записуються в регістр зазначений в адресі, і з його виходу надходять на масштабуючий підсилювач, з змінним коефіцієнтом передачі Підсилювач може бути побудований на операційному підсилювачі зі 49334 змінюваним коефіцієнтом зворотного зв'язку комутацією резисторів в зворотнім зв'язку за допомогою транзисторних ключів або перемножуючих цифро-аналогових перетворювачів [В С Путников «Интегральная электроника в измерительных устройствах», Л «Энергоатомиздат»,- 1988,- С 233237] і не представляє сутність винаходу Гальванічна розв'язка також є стандартним блоком, наприклад [В С Путников «Интегральная электроника в измерительных устройствах»,- Л - «Энергоатомиздат»,- 1988,- С 53-60], та не являє сутності винаходу Блок 7 аналогічний за структурою блоку 5, тільки вхідними даними є сигнали з первинних перетворювачів струму Блок захисту 6 виконує функції захисту двигуна що випробовується і реалізує весь перелік необхідних захистів максимально токовий, теплова, контроль зникнення та чергування фаз і ш Структурна схема блоку представлена на фіг 5 На фіг 6 представлений алгоритм роботи блоку захисту 6 Після подачі напруги живлення на процесорний пристрій проводиться ініціалізація внутрішніх пристроїв і змінних, після чого процесор очікує програмування уставок захисту Програмуються такі уставки 1 Lax - максимально припустимий струм фази, 2 ti - час, після закінчення якого, якщо 'max струм фази перевищує Lax то проводиться видача сигналу по лінії 9 на блокування СІФК, 3 К| - коефіцієнт перевищення струму щодо номінального струму (Ін) Якщо струм вище, ніж К|*ІН, то починає працювати тепловий захист 4 t, - час, після закінчення якого, якщо тепл 1 виконується умова спрацьовування теплового захисту, зазначена в пункті 3 видається попередження блоку 3 по цифровій шині 7 5 t, - час, після закінчення якого, якщо 'тепл 2 виконується умова спрацьовування теплового захисту, зазначена в пункті 3 проводиться видача сигналу по лінії 9 на блокування СІФК, 6 Km - коефіцієнт зниження напруги щодо номінальної (UH) Якщо діюче значення напруги за період менше Киі*и н , то через час t,, видаєтьmm ся попередження блоку 3 по цифровій шині 7 7 Ku2 - коефіцієнт зниження напруги щодо номінальної (UH) Якщо діюче значення напруги за період менше Ku2*UH то через час t,, провои крит диться видача сигналу по лінії 9 на блокування СІФК Після програмування уставок, командою від блоку 3 по цифровій лінії 7 проводиться розблокування пристрою Пристрій розблокується тільки якщо включено автоматичний вимикач (блок 8) і від його блоків-контактів надходить активний сигнал При цьому знімається блокування СТФК* (блок 4) перекладом ЛІНІЯ 9 у неактивний стан і починає виконуватися основний цикл процесорно 8 го пристрою блоку захисту 1 проводиться послідовне опитування аналогових ЛІНІЙ 1, 2, 3 від датчиків струму і 4, 5, 6 від датчиків напруги за допомогою послідовної комутації їх за допомогою аналогового мультиплексору на аналого-цифровий перетворювач і запуск перетворення, 2 перевіряється перевищення миттєвого значення струму кожної з фаз над значенням уставки Lax Якщо при наступних опитуваннях протягом часу t, струм не повернеться в межі норми, то 'max виробляється блокування СІФК за допомогою перекладу сигналу по лінії 9 у активний стан, 3 проводиться визначення кінця періоду сітьової напруги на підставі аналізу миттєвих значень напруги Якщо знайдено кінець періоду по одній з фаз, то розраховуються ДІЮЧІ значення струму і напруги для даної фази (Враховуючи, що фазовий зсув складає 120°, то одночасно може наступити кінець періоду тільки по одній з фаз Надалі будемо називати цю фазу поточною) Якщо ні по одній з фаз кінець періоду не досягнуто, то дія переходить у пункт 1, інакше пункт 4, 4 перевіряється перевищення діючого значення струму поточної фази над К|*ІН Якщо умова виконується і через час t, струм не прихотепл 1 дить у норму, то контролеру нижнього рівня (блок 3) видається попередження по цифровій шині 7,а якщо струм не повернувся у норму за час t, , то виробляється видача сигналу по лінії 'тепл 2 9 на блокування СІФК, 5 перевіряється, якщо діюче значення напруги поточної фази нижче Kui*UH і напруга не повертається у норму за час t,, , то контролеру нижmm нього рівня (блок 3) видається попередження по цифровій шині 7 10 49334 MICROCHIP серії РІС16ХХ [DS30390E "8-bit CMOS microcontrollers with A/D converter" Microchip Technology Inc , 1997 ], контролерів фірми MOTOROLA серп НС 08 ["68HC908MR 16/32 Advanced Information " Motorola Inc , 2000] чи контролерах інших фірм Блок 8 це автоматичний вимикач з незалежним розмикачем і не представляє сутності винахоДУ Обчислювальний блок верхнього рівня (блок 9) являє собою мікропроцесорну систему, що керує через контролер нижнього рівня (блок 3) усією системою по цифровий шині 1, а також робить виміри за допомогою блоку 10 і розрахунок параметрів двигуна що випробовується(блок 1) В якості мікропроцесорної систему може бути використаний IBM сумісний комп'ютер промислового або офісного виконання Даний блок є стандартним і не представляє суті винаходу Обчислювальний блок верхнього рівня має у своєму складі блоки для вводу, та виводу інформації Блок вводу інфо В во з д а W O O L м і ф fltoj» рмації дозволяє вводити дані асинхронного двигуна, які необхідні для розрахунку кінцевих параметрів боком 9 та робити ІНШІ ПЛИВИ на систему в ході діагностики В якості блоку 11 може бути застосована стандартна 101 клавішна клавіатура IBM для сумісних ЕОМ чи функціональна клавіатурна матриця, даний блок являє суть винаходу Блок виводу інформації призначений для відображення поточних даних і кінцевих результатів роботи обчислювального блоку верхнього рівня 9, і являє собою графічний монітор для відображення поточних результатів роботи комплексу і друкувальний пристрій для друкування звіту про проведені випробування і не являє суті винаходу Блок 10 являє собою стандартну плату АЦП, що дозволяє опитувати ВХІДНІ аналогові сигнали, що надходять від блоків 5 і 7, перетворювати їх у цифрову форму і передавати блоку 9 Процеси виміру синхронізуються за допомогою вбудованого в блок 10 таймера Даний блок не представляє сутності винаходу м ФІГ. 1 Дд блоку Ч До бппяу S До блока * Тії £ До блоку 5 По Ставу Фіг. 2 До блоку 5 До Гілпку 7 49334 11 12 Фіг. З Б и ntpeникого датчика ннпізу п і физ ЛЕЗ B m SJT^I> | 'адьр антіпа роів'яіка і •М пілснлвоіш.ч Регистр з В і з ПГрвіїннлгй І^ҐПІНЬЙ J" ішсір/ги фш: ВС J^ B y msf-BHFhwnfhjTj L_ Фіг. 4 49334 13 14 Да Илия/З Дй Й.Пйку 5 АЦП Аналоговий мультиплексор Процесорний пристрій До б кку 6 Пїд блоку ^ До faiwv S 10 Фіг. 5 Да--&пДОїіп 15 49334 С Початок ¥ Програмування уставок Ініциювання пристріш блоку Опитування значень 3 фаз струмів та напруг від АЦГ1 Якщо струм будь якої фази > Ііпах Відключення та скидання таймера і Розрахунок дійсних значень струмів та напруг на протязі періоду Відключення та скидання таймеру 2 Відключення та скидання таймеру З Відключення та скидання таймеру 4 ФІГ.6 16 17 49334 18 Відключення таймеру 2 4кг Попередження про зниження напруги ПОЛІНІГ'З Сигнал на відключення по лїнії9 Віжаїючити таймер 4 Блокування роботи ео походу по лінії 3 сигналу разблохування чи виключення живлення Фіг.7 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна ( 0 4 4 ) 4 5 6 - 2 0 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for diagnostics of asynchronous cage motors
Автори англійськоюRodkin Dmytro Yosypovych, Barvinok Dmytro Volodymyrovych, Chornyi Oleksii Petrovych
Назва патенту російськоюУстройство для диагностики асинхронных электродвигателей с короткозамкнутым ротором
Автори російськоюРодькин Дмитрий Иосифович, Барвинок Дмитрий Владимирович, Черный Алексей Петрович
МПК / Мітки
МПК: G01R 31/34
Мітки: двигунів, асинхронних, ротором, пристрій, короткозамкненим, діагностики
Код посилання
<a href="https://ua.patents.su/9-49334-pristrijj-dlya-diagnostiki-asinkhronnikh-dviguniv-z-korotkozamknenim-rotorom.html" target="_blank" rel="follow" title="База патентів України">Пристрій для діагностики асинхронних двигунів з короткозамкненим ротором</a>
Спосіб діагностики параметрів асинхронного двигуна з короткозамкненим ротором та пристрій для його здійснення
Номер патенту: 36060
Опубліковано: 16.04.2001
Автори: Добрецов Володимир Валентинович, Сисюк Геннадій Юрійович, Родькін Дмитро Йосипович, Чорний Олексій Петрович, Луговой Анатолій Васильович, Вошун Олексій Миколайович, Долженко Віктор Володимирович, Пасмурских Олександр Олексійович
МПК: G01R 31/34
Мітки: ротором, короткозамкненим, пристрій, здійснення, спосіб, двигуна, діагностики, асинхронного, параметрів
Формула / Реферат:
1. Спосіб діагностики параметрів асинхронного двигуна з короткозамкненим ротором, який полягає в підключенні статорних обмоток до однофазної мережі промислової частоти, вимірюванні напруги, струму та кута зсуву між ними, в відключенні статорних обмоток від мережі в момент переходу струму через нуль, вимірюванні залишкової напруги після відключення, який відрізняється тим, що в момент відключення вимірюють стрибок напруги на затискачах статора...
Пристрій для пуску асинхронного електродвигуна з короткозамкненим ротором
Номер патенту: 39987
Опубліковано: 16.07.2001
Автор: Слободянюк Віктор Костянтинович
МПК: H02P 1/16
Мітки: асинхронного, пристрій, пуску, ротором, короткозамкненим, електродвигуна
Формула / Реферат:
Пристрій для пуску асинхронного електродвигуна з короткозамкненим ротором, який містить кінематично з'єднані розгінний електродвигун, пружну передачу, асинхронний електродвигун з датчиком швидкості, під'єднаний до джерела живлення, блок управління, що містить пускач з контактами, кнопку "Пуск", кнопку "Стоп" і проміжне реле з контактами, під'єднане до датчика швидкості, який відрізняється тим, що блок управління...
Пристрій для пуску потужних електромеханічних систем на базі асинхронних електродвигунів з фазним ротором
Номер патенту: 15336
Опубліковано: 30.06.1997
Автори: Калюжний Володимир Владиславович, Сердюков Юрій Павлович, Лобас Віктор Григорович
МПК: H02P 25/16, H02P 5/00
Мітки: пристрій, фазним, електромеханічних, систем, ротором, потужних, базі, електродвигунів, пуску, асинхронних
Формула / Реферат:
Устройство для пуска мощных электромеханических систем на базе асинхронных электродвигателей с фазным ротором, содержащее параметрический источник тока с неуправляемым вентильным комплектом на выходе электродвигателей, фазные роторы которых связаны со входами переменного тока соответствующих неуправляемых вентильных комплектов, выходы постоянного тока которых включены через пусковое сопротивление согласно-последовательно между собой и с...
Спосіб регулювання напруги асинхронного вентільного генератора з короткозамкненим ротором
Номер патенту: 7773
Опубліковано: 26.12.1995
Автори: Вишневський Леонід Вікторович, Пасс Анатолій Єгорович, Колесніченко Олександр Владимірович
МПК: H02P 9/00
Мітки: вентільного, генератора, напруги, спосіб, короткозамкненим, ротором, регулювання, асинхронного
Формула / Реферат:
Способ регулирования напряжения асинхронного вентильного генератора с короткозамкнутым ротором, заключающийся в том, что измеряют напряжение на выходе генератора, сравнивают его с заданным и формируют сигнал рассогласования, коммутируют вентили тиристорного источника реактивной мощности, отличающийся тем, что, с целью повышения динамической точности и устойчивости процесса регулирования, выделяют основную гармонику фазного напряжения на...
Пристрій для навантаження асинхронних електродвигунів
Номер патенту: 37857
Опубліковано: 15.05.2001
Автори: Мосьпан Владислав Олександрович, Мосьпан Денис Владиславович
МПК: G01R 31/34
Мітки: пристрій, електродвигунів, асинхронних, навантаження
Текст:
...10 - шунтуючий вимикач і контактор - це типові електротехнічні вироби, що широко застосовуються на практиці, і тому в додатковому описі не мають потреби. Блок 11 - логічний перемикаючий пристрій, являє собою електромеханічний або електронний пристрій, за допомогою якого здійснюється підключення електродвигуна, що навантажується, 1 до мережі, пуск електродвигуна, що навантажується, 1 при замкненому шунтуючому вимикачі 9, перемикання груп...
Попередній патент: Спосіб визначення ушкодженого приєднання в електричній мережі
Наступний патент: Позисторний керамічний матеріал на основі титанату барію
Випадковий патент: Пристрій для промивки систем змащення машин