Спосіб обертання фази модульованого сигналу (варіанти) і пристрій для його здійснення
Формула / Реферат
1. Спосіб обертання фази модульованого сигналу, згідно з яким:
- визначають обертання фази модульованого сигналу, викликане корекцією характеристик схемного елемента, зв'язаного з сигнальним каналом цього модульованого сигналу, базуючись на щонайменше одному керуючому сигналі, і
- здійснюють компенсацію обертання фази відносно модульованого сигналу, щоб компенсувати обертання фази, викликане цією корекцією характеристик схемних елементів.
2. Спосіб за п. 1, який відрізняється тим, що здійснення компенсації обертання фази включає обертання фази модульованого сигналу на величину, що відповідає визначеному обертанню фази, у напрямку, протилежному напрямку визначеного обертання фази.
3. Спосіб за п. 1, який відрізняється тим, що щонайменше один керуючий сигнал використовують для корекції однієї або декількох характеристик схемного елемента згідно з робочим станом, визначеним цим щонайменше одним керуючим сигналом.
4. Спосіб за п. 2, який відрізняється тим, що обертання фази модульованого сигналу здійснюють з використанням комплексного перемножувача.
5. Спосіб за п. 2, який відрізняється тим, що обертання фази модульованого сигналу здійснюють у цифровій формі.
6. Спосіб за п. 1, який відрізняється тим, що компенсацію обертання фази здійснюють у час, що відповідає часу корекції.
7. Спосіб за п. 6, який відрізняється тим, що час, за яким виконана компенсація обертання фази, вирівнюють з часом корекції так, що розрив фази в модульованому сигналі зменшується, коли корекція має місце.
8. Спосіб за п. 6, який відрізняється тим, що час обертання фази приблизно збігається з часом корекції.
9. Спосіб за п. 1, який відрізняється тим, що здійснення компесації включає обертання фаз псевдошумових послідовностей, використаних для cпектрально розширених даних, з яких був генерований модульований сигнал.
10. Спосіб за п. 9, який відрізняється тим, що псевдошумові послідовності включають псевдошумові послідовності, визначені стандартом IS-95-A.
11. Спосіб за п. 1, який відрізняється тим, що здійснення компенсації включає обертання фаз даних, які використовуються для генерування модульованого сигналу.
12. Спосіб за п. 1, який відрізняється тим, що здійснення компенсації включає обертання фаз одного або декількох несучих сигналів, що використовуються для генерування модульованого сигналу.
13. Спосіб за п. 1, який відрізняється тим, що кожне значення щонайменше одного керуючого сигналу відповідає певному значенню обертання фази.
14. Спосіб за п. 13, який відрізняється тим, що значення обертання фази, які відповідають значенням щонайменше одного керуючого сигналу, зберігаються у довідковій таблиці і тим, що визначення обертання фази виконують з використанням цієї таблиці.
15. Спосіб за п. 1, який відрізняється тим, що обертання фази модульованого сигналу виконують дискретними інкрементами.
16. Спосіб за п. 1, який відрізняється тим, що схемний елемент знаходиться безпосередньо в сигнальному каналі.
17. Спосіб за п. 1, який відрізняється тим, що схемний елемент має оперативне з’єднання з сигнальним каналом.
18. Спосіб обертання фази модульованого сигналу, згідно з яким:
- визначають зсув по фазі модульованого сигналу, створеного одним або декількома схемними елементами, зв'язаними з сигнальним каналом модульованого сигналу, базуючись на щонайменше одному керуючому сигналі, і
- виконують корекцію фази відносно модульованого сигналу для компенсації зсуву по фазі модульованого сигналу, створеного одним або декількома схемними елементами, зв'язаними з сигнальним каналом.
19. Спосіб за п. 18, який відрізняється тим, що виконання корекції фази включає зсув фази модульованого сигналу на величину відповідного визначеного зсуву по фазі у протилежному напрямку відносно напрямку визначеного зсуву по фазі.
20. Спосіб за п. 18, який відрізняється тим, що щонайменше один керуючий сигнал використовують для корекції однієї або декількох характеристик одного або декількох схемних елементів згідно з робочим станом, визначеним цим щонайменше одним керуючим сигналом.
21. Спосіб обертання фази модульованого сигналу, згідно з яким:
- приймають щонайменше один потік даних і пару псевдошумових послідовностей,
- розширюють щонайменше один потік даних парою псевдошумових послідовностей для генерування розширених даних,
- модулюють розширені дані, щоб згенерувати модульований сигнал;
- формують модульований сигнал щонайменше одним схемним елементом, щоб згенерувати вихідний сигнал, базуючись на щонайменше одному керуючому сигналі, що використовується для корекції однієї або декількох характеристик щонайменше одного схемного елемента, і
- компенсують обертання фази вихідного сигналу, створеного корекцією однієї або декількох характеристик щонайменше одного схемного елемента, базуючись на щонайменше одному керуючому сигналі.
22. Спосіб за п. 21, який відрізняється тим, що компенсація обертання фази включає обертання фаз псевдошумових послідовностей.
23. Спосіб за п. 21, який відрізняється тим, що компенсація обертання фази включає обертання фаз розширених даних.
24. Спосіб за п. 21, який відрізняється тим, що компенсація обертання фази включає обертання фаз одного або декількох несучих сигналів, що використовуються для модуляції розширених даних.
25. Пристрій для обертання фази модульованого сигналу, який включає:
- процесор для обробки сигналів, щоб приймати потік даних і генерувати модульований сигнал, базований на потоці даних, і
- щонайменше один схемний елемент, з'єднаний з процесором для обробки сигналів в режимі модульованого сигналу, базованого на керуючому сигналі, що використовується для корекції однієї або декількох характеристик щонайменше одного схемного елемента,
причому обертання фази модульованого сигналу, створене корекцією однієї або декількох характеристик щонайменше одного схемного елемента, визначають і компенсують, базуючись на керуючому сигналі.
26. Пристрій за п. 25, який відрізняється тим, що процесор для обробки сигналів включає розширювач для розширення потоку даних псевдошумовими послідовностями, призначений для генерування розширених даних.
27. Пристрій за п. 26, який відрізняється тим, що обертання фази модульованого сигналу, створене корекцією однієї або декількох характеристик, компенсується обертанням фаз розширених даних, генерованих розширювачем.
28. Пристрій за п. 26, який відрізняється тим, що обертання фази модульованого сигналу, створене корекцією однієї або декількох характеристик, компенсується обертанням фаз псевдошумових послідовностей.
29. Пристрій за п. 25, який відрізняється тим, що процесор для обробки сигналів має модулятор для модуляції потоку даних з одним або декількома несучими сигналами.
30. Пристрій за п. 29, який відрізняється тим, що обертання фази модульованого сигналу, створене корекцією однієї або декількох характеристик, компенсується обертанням фаз одного або декількох несучих сигналів.
31. Пристрій за п. 25, який відрізняється тим, що обертання фази модульованого сигналу, створене корекцією однієї або декількох характеристик, визначається за допомогою довідкової таблиці, яка містить набір значень обертання фази, кожне з яких відповідає значенню керуючого сигналу.
32. Пристрій за п. 25, який відрізняється тим, що щонайменше один схемний елемент має елемент змінного підсилення, коефіцієнт підсилення якого визначається керуючим сигналом.
33. Пристрій за п. 32, який відрізняється тим, що елемент змінного підсилення є підсилювачем зі змінним підсиленням.
34. Пристрій за п. 25, який відрізняється тим, що щонайменше один схемний елемент включає активний схемний елемент, який має струм зміщення, визначений керуючим сигналом.
35. Пристрій за п. 34, який відрізняється тим, що активний схемний елемент є підсилювачем потужності.
Текст
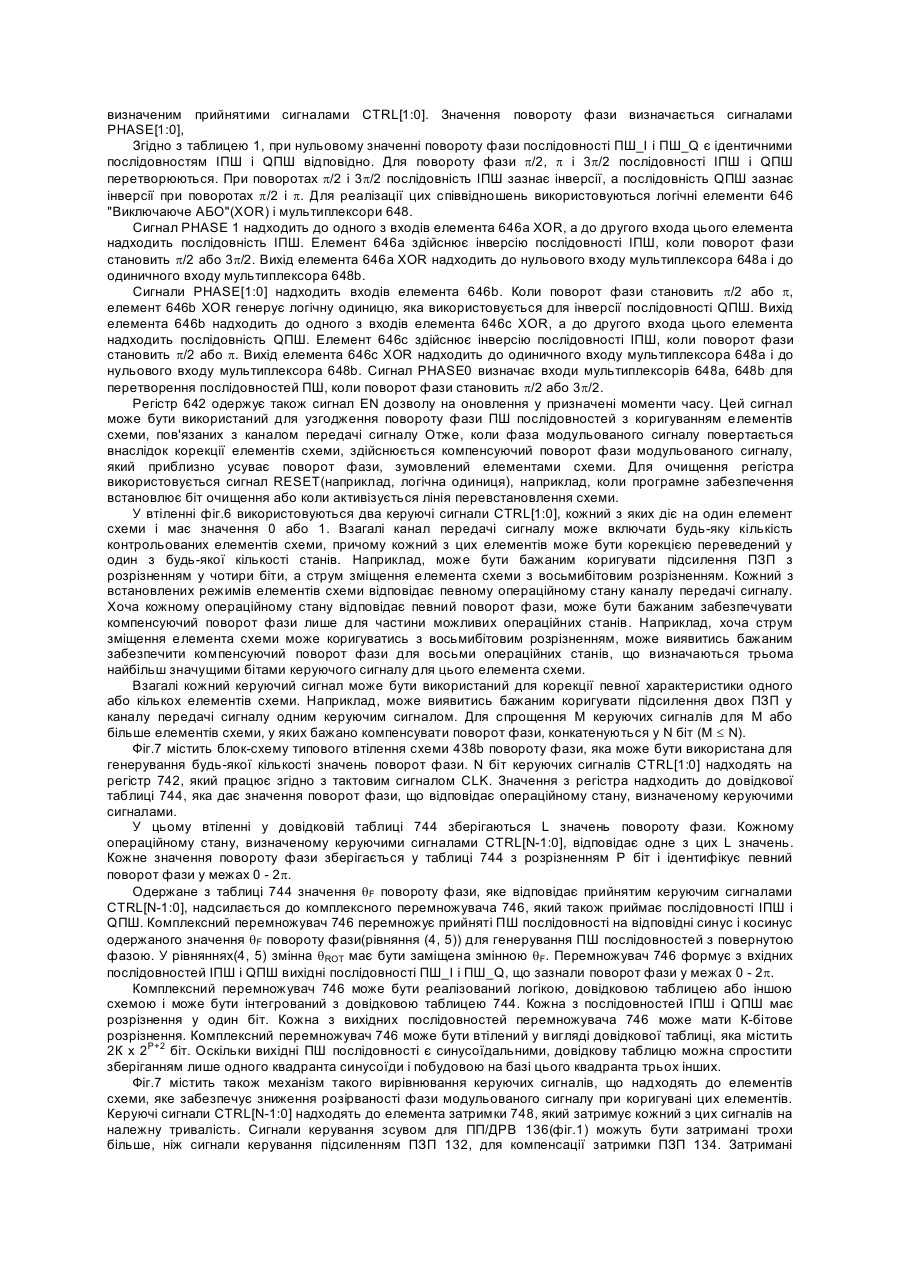
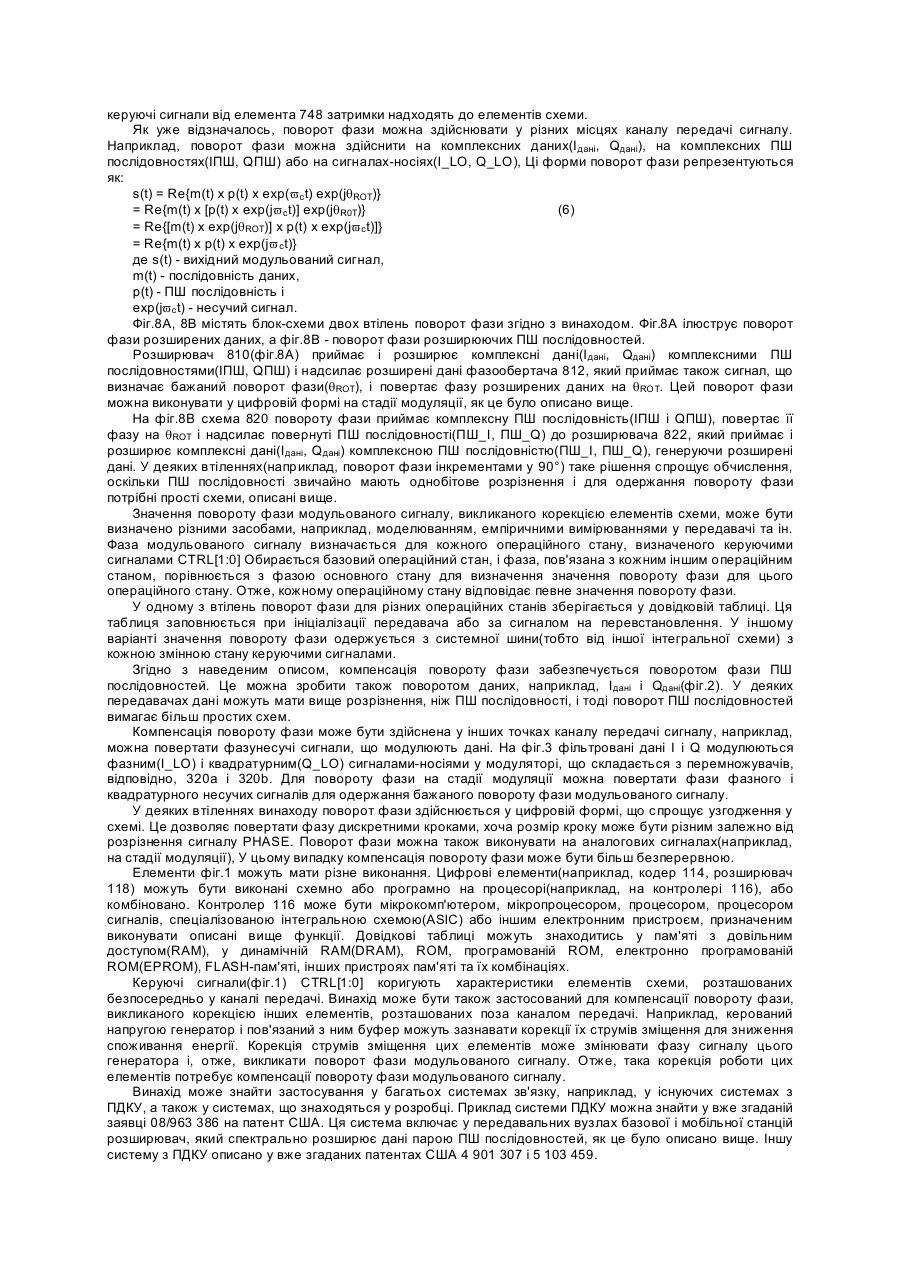
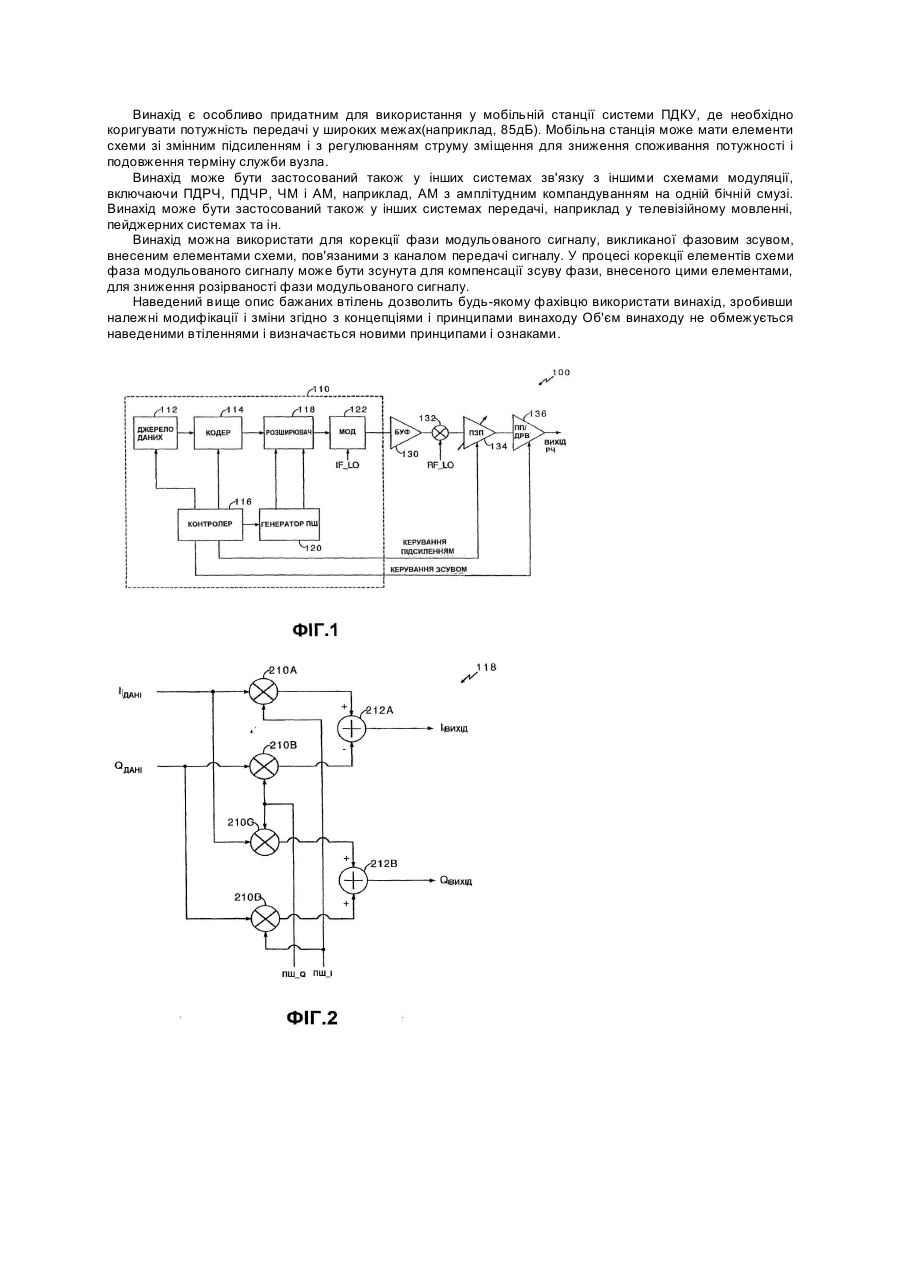
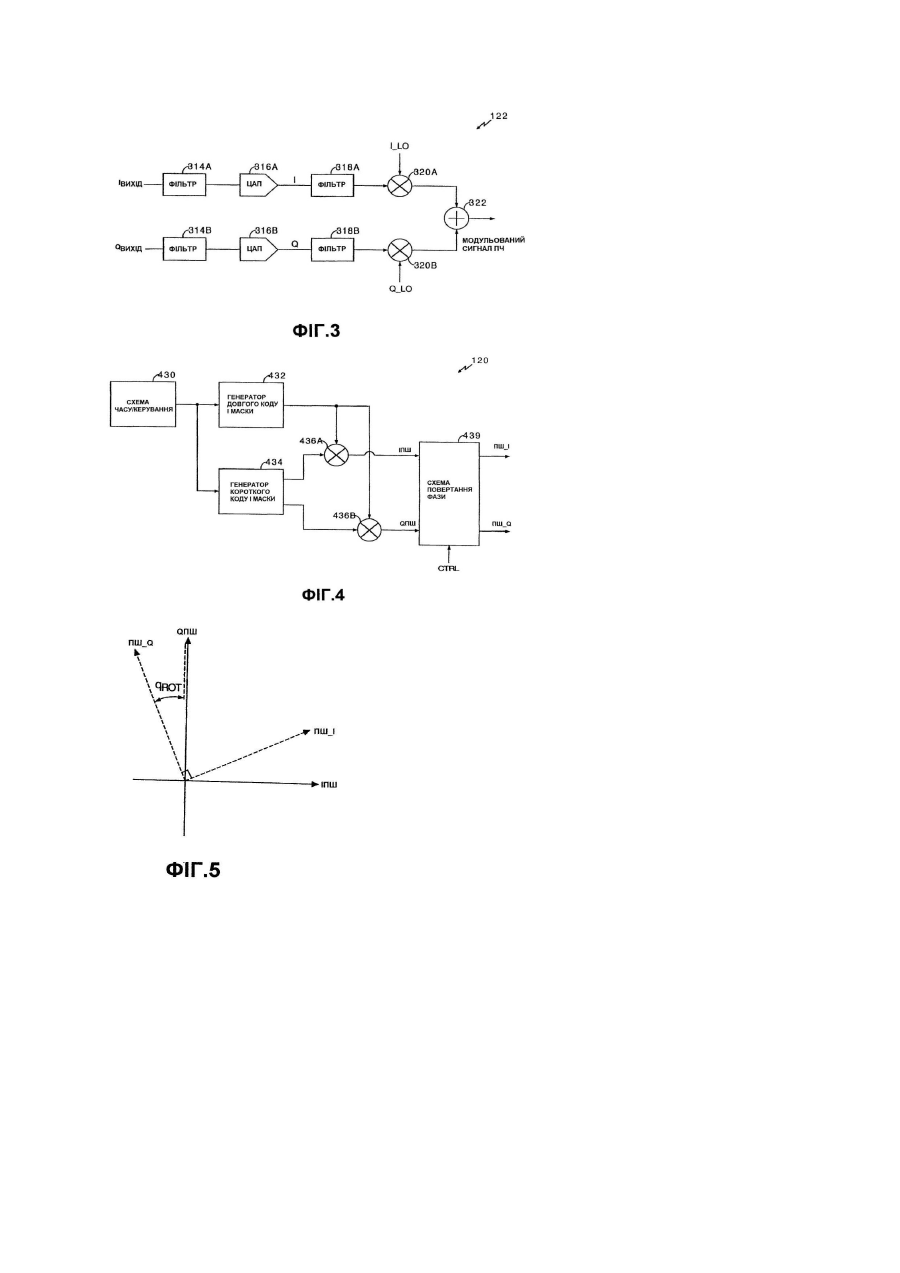
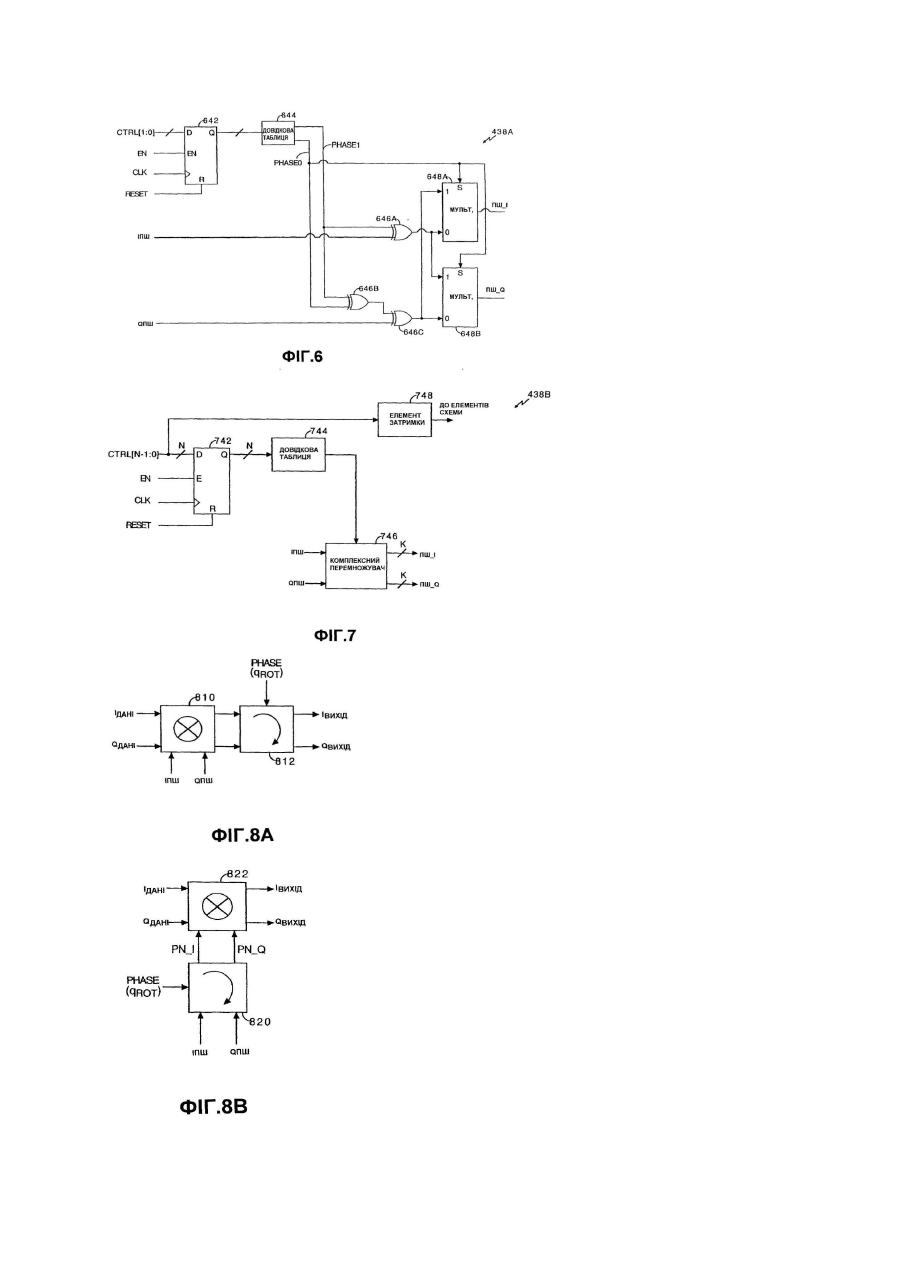
Винахід стосується передачі даних, зокрема, способу і пристрою для повороту фази модульованого сигналу. У багатох системах зв'язку перед передачею до приймального пристрою дані обробляють, модулюють і адаптують. Обробка даних включає компресійне кодування, кодування з корекцією помилок, покриття для створення ортгональних каналів, розширення для розсіювання даних у спектрі та ін. Оброблені дані модулюються одним або більше сигналами - носіями для одержання модульованого сигналу, придатного для передачі. Використовуються різні схеми модуляції, наприклад, квадратурна маніпуляція фазовим зсувом(КМФЗ), зсунута КМФЗ, квадратурно-амплітудна модуляція(КАМ), частотна модуляція(ЧМ), амплітудна модуляція(AM) тощо. Перед передачею модульований сигнал піддають подальшим маніпуляціям(наприклад, буферуванню, підсиленню, фільтруванню тощо). Обробку сигналу виконуть численні схемні елементи на каналі передачі, і деякі з цих елементів вносять спотворення у сигнал. Наприклад, нелінійність елемента схеми(підсилювача, міксера тощо) може створити інтермодуляційні спотворення. Крім того, ці елементи можуть повертати фазу модульованого сигналу. Належним конструюванням елементів схеми ці спотворення можна підтримувати на прийнятному рівні. Для поліпшення ефективності і підвищення інформаційної ємкості системи канал передачі сигналу може включати елементи схеми, які можна селективно контролювати, базуючись на робочих умовах передавального пристрою. Прикладами таких елементів можуть бути один або більше елементів зі змінним підсиленням, яке можна коригувати для забезпечення змінного рівня потужності передачі. Канал передачі сигналу може включати активні елементи з струмом зміщення, який можна коригувати для зниження споживання потужності при бажаних робочих параметрах(наприклад, лінійності, ширині смуги). Коригуванням змінних елементів схеми на передавальному каналі може змінити характеристики модульованого сигналу, зокрема, можна повертати фазу цього сигналу. Коли елементи схеми зазнають ступінчастої корекції, фаза модульованого сигналу стає розірваною і це може призвести до зниження якості роботи. Такі зміни фази можуть бути простежені у приймачі, однак, це накладає обмеження на ширину смуги оцінки фази. Для забезпечення роботи з дуже низьким відношенням сигнал/шум(ВСМ) бажано використовувати вузькосмугові оцінювальні пристрої(тобто такі, що мають велику константу часу), що погіршує таке простеження. Отже, існує потреба у способі повороту фази модульованого сигналу для компенсації повороту фази, створеного корекцією елементів каналу передачі сигналу. Об'єктом винаходу є спосіб корекції повороту фази модульованого сигналу для компенсації повороту фази, внесеного елементами схеми на каналі передачі сигналу. Приблизно одночасним поворотом фази модульованого сигналу на величину, внесену елементами схеми, але у протилежному напрямку, можна знизити розірваність фази у модульованому сигналі. Компенсацію повороту фази можна здійснити у різних місцях каналу передачі. У деяких втіленнях поворот фази виконується у цифровому форматі поворотом або даних і псевдошумових(ПШ) послідовностей, застосованих для розширення спектра даних, або несучого сигналу, який модулює дані. Компенсація повороту фази може бути застосована для багатьох схем модуляції, включаючи, паралельний доступ з кодовим ущільненням каналів(ПДКУ), паралельний доступ з розділенням каналів у часі(ПДРЧ), паралельний доступ з частотним розділенням каналів(ПДЧР) та ін. і для різних форматів модуляції(КМФЗ, зсунута КМФЗ, КАМ та ін.). Втілення винаходу дає спосіб повороту фази модульованого сигналу на каналі передачі сигналу. Згідно з цим способом, передбачається прийом щонайменше одного керуючого сигналу, причому кожний з цих сигналів призначається для коригування певної характеристики(наприклад, підсилення, струму зміщення) одного або більше елементів схеми(наприклад, ПЗП, ПП), пов'язаних з каналом передачі сигналу. Елементи схеми можуть бути включені безпосередньо у каналі передачі сигналу, або операційно зв'язані з ним. Далі визначається поворот фази, який відповідає операційному стану, визначеному щонайменше одним прийнятим керуючим сигналом, і фаза модульованого сигналу повертається на величину, пов'язану з цим визначеним поворотом фази або близько до нього. Для повороту фази можна використати комплексний перемножувальний пристрій і здійснювати поворот у цифровому форматі. Поворот фази можна здійснювати у зумовлені моменти таким чином, щоб корекція елементів схеми знижувала дискретності фази модульованого сигналу. Значення повороту фази може мати будь-яке розрізнення і точність і можуть бути репрезентовані таблично. У деяких системах з ПДКУ фазу модульованого сигналу повертають поворотом фази ПШ послідовностей, використаних для спектрального розширення даних. В таких системах відбувається одержання щонайменше одного потоку даних і пари ПШ послідовностей. Прийняті потоки даних потім спектрально розширюються цими ПШ послідовностями. Ці ПШ послідовності можуть включати короткі ПШ І-послідовності і Q-послідовності, визначені стандартом IS-95-A. Інше втілення винаходу передбачає спосіб повороту фази вихідного сигналу передавача ПДКУ. Згідно з цим способом, відбувається одержання щонайменше одного потоку даних і пари ПШ послідовностей. Одержані потоки даних потім спектрально розширюються цими ПШ послідовностями з генеруванням розширених даних. Розширені дані піддаються модуляції з генеруванням модульованого сигналу, який потім обробляють щонайменше одним елементом схеми для генерування вихідного сигналу. Приймається щонайменше один керуючий сигнал, призначений коригувати певну характеристику(наприклад, підсилення, струм зміщення) одного або більше елементів схеми Далі визначається поворот фази, який відповідає операційному стану, визначеному щонайменше одним прийнятим керуючим сигналом, і для повороту фази вихідного сигналу фази ПШ послідовностей повертаються на величину, пов'язану з цим визначеним поворотом фази або близьку до нього. Ще одне втілення винаходу передбачає використання передавача з сигнальним процесором, з'єднаним з контролером, і з щонайменше одним елементом схеми, сигнальний процесор приймає і перемножує щонайменше один потік даних з щонайменше одним несучим сигналом для генерування модульованого сигналу. Елементи схеми, приймаючи і обробляючи модульований сигнал, генерують вихідний сигнал. До елементів схеми надсилається щонайменше один керуючий сигнал, призначений коригувати певний параметр одного або більше елементів схеми. Контролер приймає керуючі сигнали ί визначає поворот фази, який відповідає операційному стану, визначеному щонайменше одним прийнятим керуючим сигналом. Фаза вихідного сигналу повертається на величину, що відповідає цьому визначеному повороту фази або близьку до нього. Сигнальний процесор може включати розширюючий елемент, який приймає і спектрально розширює потоки даних парою ПШ послідовностей для генерування розширених даних. Замість цього або у додаток до цього сигнальний процесор може включати модулятор, який приймає і модулює потоки даних фазним несучим сигналом і квадратурним несучим сигналом, генеруючи модульований сигнал. Фаза модульованого сигналу може бути повернута поворотом фаз ПШ послідовностей, фаз потоків даних або фазнесучіх сигналів. Контролер може також містити довідкову таблицю, яка приймає керуючі сигнали і дає значення повороту фази, яке відповідає операційному стану, визначеному прийнятими керуючими сигналами. Винахід включає також корекцію фази модульованого сигналу для компенсації фазових зсувів, внесених елементами схеми, пов'язаними з каналом передачі сигналу. Особливості, об'єкти і переваги винаходу детально розглядаються у наведеному подальшому описі з посиланнями на креслення, у яких: фіг.1 - блок-схема типового втілення передавача, який має механізм повороту фази згідно з винаходом; фіг.2 - блок-схема типового втілення розширюючого пристрою; фіг.3 - блок-схема типового втілення модулятора; фіг.4 - блок-схема типового втілення генератора ПШ; фіг.5 - діаграма, що ілюструє поворот фази пари квадратурних ПШ послідовностей; фіг.6, 7 - блок-схеми двох типових втілень схеми повороту фази; фіг.8А, 8В - блок-схеми двох втілень повороту фази. Фіг.1 іллюструє блок-схему типового втілення передавача 100, який має механізм повороту фази згідно з винаходом. У передавальному вузлі 110 дані від джерела 112 даних розділяються на кадри даних, які надходять до кодера 114. Контролер 116 може керувати цим розділенням і надсиланням даних від джерела 112 і формувати і надсилати додаткові дані і повідомлення до кодера 114. Кодер 114 кодує прийняті дані і повідомлення згідно з певним форматом і надсилає кодовані дані до розширюючого пристрою 118, який також приймає від генератора 120 ПШ пару ПШ послідовностей і генерує розширені дані. Розширені дані надходять до модулятора(МОД) 112, який модулює ці дані сигналом-носієм (IF_LO) проміжної частоти(ПЧ)згідно з певним форматом модуляції(наприклад, КМФЗ) і генерує модульований сигнал ПЧ. Розширюючий пристрій 118 і модулятор 122 є частиною сигнального процесора, який приймає дані, ПШ послідовності і несучий сигнал IF_LO ПЧ і генерує модульований сигнал ПЧ Деякі з елементів схеми розглянуті далі більш детально. Модульований сигнал ПЧ надходить у буфер 130, який його буферує і надсилає буферований сигнал до міксера 132. Міксер 132 приймає також інший несучий сигнал RF_LO(наприклад, синусоїдальний) і перетворює буферований сигнал з підвищенням частоти за допомогою сигналу RF_LO у сигнал РЧ. Міксер 132 може бути реалізований як комплексний перемножувач. Сигнал РЧ надходить до підсилювача з змінним підсиленням 134(ПЗП), який підсилює цей сигнал згідно з коефіцієнтом підсилення, визначеним сигналом керування підсиленням від контролера 116. Підсилений сигнал РЧ надходить до підсилювача потужності(драйвера) ПП/ДРВ 136, який забезпечує належну потужність сигналу. Для економії потужності струм зміщення ПП/ДРВ 138 може коригуватись коригуючим сигналом від контролера 116. Модульований сигнал від ПП/ДРВ звичайно фільтрується зовнішнім фільтром для видалення дзеркальних і паразитних сигналів. Фільтрований сигнал проходить через ізолятор і антенний перемикач і передається антеною до приймального пристрою(не показані). Передавач 100 може бути модифікований згідно з різними стандартами ПДКУ, наприклад, (1) [стандартом ТІА/ЕІА IS-95-A ("Стандарт сумісності мобільних і базоамх станцій для широкосмугових систем двостороннього зв'язку розширеного спектру")], (2) [стандартом "ТІА/ЕІА IS-98-Α,-Β і -С, ("Рекомендований мінімальний стандарт для мобільних і базових станцій розширеного спектра")], (3) ["The cdma2000 ITU-R RTT Candidate Submission"(IS-2000)] і (4) ["The ETSI UMTS Terrestrial Radio Access(UTRA) ITU-R RTT Candidate Submission"(далі - WCDMA)], включених у цей опис посиланням. Передавач 100 може бути пристосований до різних архітектур ПДКУ, наприклад, описаних у патентах США 4 901 307 і 5 103 459 і заявці на патент США 08/963 386, включених посиланням. Винахід може бути застосований у системах ПДКУ зазначених стандартів і архітектур, а також стандартів і архітектур, що знаходяться у розробці. Передавач фіг.1 припускає різні модифікації. Наприклад, обробка цифрового сигналу може включати операції, відмінні від ілюстрованих фіг.1, а саме, ця обробка може включати повторення символів, вкраплювання символів, переміження тощо, відомі фахівцям. Крім того, у каналі передачі сигналу можуть використовуватись інші або додаткові фільтри, буфери, міксери і каскади підсилення. Елементи можуть бути включені у інших конфігураціях. У типовому втіленні передавальний вузол 110 реалізований у вигляді інтегральної схеми, а решта елементів схеми - як інша інтегральна схема, хоча можна використати і іншу кількість інтегрованих схем і/або дискретних елементів. Як можна бачити з фіг.1, може виявитись бажаною корекція деяких характеристик деяких елементів схеми, пов'язаних з каналом передачі сигналу. Наприклад, можуть бути введені один або кілька елементів змінного підсилення(наприклад, ПЗП 134), через які можна коригувати рівень потужності передачі, що може виявитись необхідним для забезпечення певного рівня якості(наприклад, певної частоти хибних біт) у приймальному пристрої з одночасним зменшенням перешкод для інших пристроїв системи. Крім того, можна коригувати струм зміщення деяких елементів каналу передачі(наприклад, ПП/ДРВ 136) для економії потужності і продовження терміну служби. Приклад підсилювача потужності з коригуванням струму зміщення можна знайти у заявці 09/034 979 на патент США. включеній посиланням. Струм зміщення звичайно підвищують, щоб підвищити рівень потужності передачі, і знижують для економії потужності. Корекція елемента схеми впливає на характеристики схеми(наприклад, підсилення, струм зміщення), але може вплинути також на характеристики сигналу, що обробляється. Наприклад, корекція підсилення ПЗП 134, як і очікувалось, впливає на рівень сигналу, але також і на фазу модульованого сигналу, що може бути небажаним або неприйнятним. Корекція струму зміщення ПП/ДРВ 136 впливає на вихідну потужність схеми, але звичайно також змінює фазу сигналу. Фаза модульованого сигналу змінюється, або повертається, керуючими сигналами, призначеними коригувати елементи схеми, пов'язані з каналом передачі сигналу. Згідно з винаходом, фазу модульованого сигналу повертають для компенсації повороту фази, зумовленого корекцією елементів схеми. Наприклад, якщо при корекції ПЗП з одного рівня підсилення до іншого фазу модульованого сигналу повертають на приблизно таку ж величину у протилежному напрямку приблизно одночасно з корекцією схеми. Таким чином, розірваність фази модульованого сигналу знижується, що підвищує якість демодуляції і поліпшує стеження за сигналом у приймальному пристрої. Компенсацію повороту фази можна виконувати у будь-якому місці каналу передачі сигналу. У типовому втіленні поворот фази відбувається у цифровому форматі, що полегшує і стабілізує роботу. Далі розглядаються поворот фази згідно з винаходом у передавачі певної структури. Фіг.2 містить блок-схему типового втілення розширювача 118, який є комплексним перемножувачем, що приймає "комплексні" вхідні дані(у вигляді І дані + jQдані) і "комплексну" ПШ послідовність(у вигляді ПШ_І + jПШ_Q), перемножує їх і формує "комплексні" вихідні дані(І вихід + jQвихід). Фактично І дані і Qдані є просто двома потоками даних, а ПШ_І і ПШ_Q є просто двома ПШ послідовностями. Послідовності ПШ_І і ПШ_Q є сигналами широкого спектра, генерованими двома ПШ кодами згідно з певним стандартом ПДКУ і системними вимогами. І дані і Qдані спектрально розширюються множенням на послідовності ПШ_І і ПШ_Q, а одержані добутки перехресно складаються для формування розширених вихідних даних І вихід і Qвихід. Розширювач 118 приймає І дані, і Qданi, і послідовності ПШ_І і ПШ_Q. Ідані надсилається до перемножувачів 210а і 210с, а Qдані до перемножувачів 210b і 210d. Послідовність ПШ_І надсилається до перемножувачів 210а і 210d, ПШ_Q до перемножувачів 210b і 210с. Кожний з перемножувачів 210 перемноженням спектрально розширює прийняті вхідні дані прийнятою ПШ послідовністю і генерує відповідні розширені вихідні дані. Виходи перемножувачів 210а і 210b надходять до суматора 212а, який віднімає вихід перемножувача 210b від виходу перемножувача 210а і генерує розширений I вихід. Подібним чином, виходи перемножувачів 210с і 210d надходять до суматора 212b, який комбінує їх і генерує розширений Qвихід. Функція розширювача 118 описується рівняннями: (І вихід + jQвихід) = (І дані + jQдані) х (ПШ_І + jПШ_Q) (1) І вихід = (Ідані х ПШ_І) - (Qдані х ПШ_Q) (2) Qвихід = (І дані х ПШ_Q) + (Qдані х ПШ_І) (3) Розширювач 118 ефективно модулює потоки І дані, і Qдані послідовностями ПШ_І і ПШ_Q операцією комплексного множення. Фіг.3 містить блок-схему типового втілення модулятора 122. Розширені дані І вихід і Qвихід надсилаються до відповідних фільтрів 314а, 314b, які їх фільтрують. Фільтри працюють як фільтри нижчих частот і, крім того, здійснюють відому фахівцям надлишкову дискретизацію з заповненням нулями. Від фільтрів 314а, 314b дані надходять до відповідних ЦАП 316а, 316b, які перетворюють ці дані у аналогові сигнали І, Q і надсилають до фільтрів нижчих частот 318а, 318b, які приглушують повторні виходи, кратні частоті перетворення ЦАП 316(наприклад, 1х, 2х, 3х, ...) Фільтри 314 або 318 можуть, крім того, виконувати корекцію типу sinx/x, відому фахівцям. Фільтровані сигнали І Q надходять до відповідних перемножувачів 320а, 320b, які приймають також фазний(I_LO) і квадратурний(Q_LO) несучі сигнали. Кожний перемножувач 320 модулює дані відповідним несучим сигналом і генерує модульований компонент. Модульовані компоненти І, Q надходять до суматора 322, який, комбінуючи їх, генерує модульований сигнал ПЧ. Перемножувачі 320 і суматор 322 виконують квадратурну модуляцію сигналів І, Q фазним і квадратурним несучими сигналами. У деяких передавачах квадратурна модуляція виконується у цифровій формі. У таких передавачах дані І, Q від відпрвідних фільтрів 314а. 314b піддаються цифровій модуляції фазним і квадратурним несучими сигналами. Модульовані цифрові компоненти І, Q об'єднуються, можливо, фільтруються і надходять до ЦАП, які формують модульований сигнал ПЧ. Фіг.4 містить блок-схему типового втілення генератора 120 ПШ, призначеного генерувати послідовності ПШ_І і ПШ_Q. У типовому втіленні дані, призначені для передачі, розширюються довгим і коротким ПШ кодами. Довгий ПШ код скремблює дані таким чином, що приймальний пристрій(наприклад, базова станція) може ідентифікувати передавальний пристрій(наприклад, базову станцію). Короткі ПШ коди спектрально розширюють дані по всій наявній смузі частот системи. Генератор 432 довгого коду, базуючись на довгому ПШ коді, генерує довгу ПШ послідовність, яка надходить далі до перемножувачів 436а, 436b. Генератор 434 короткого коду, базуючись на короткому ПШ коді, генерує пару коротких ПШ послідовностей, які також надходять до перемножувачів 436а, 436b. Довгий і короткий ПШ коди можуть бути кодами, визначеними стандартами ПДКУ(наприклад, IS-95-А). Кожний з перемножувачів 436 перемножую прийняті довгу і коротку ПШ послідовності і генерує відповідну вихідну ПШ послідовність. Послідовності ІПШ і QПШ від перемножувачів 436а, 436b надходять до схеми 438 повороту фази, яка повертає фази цих послідовностей згідно з керуючим сигналом CTRL. Повернуті за фазою послідовності ПШ_І і ПШ_Q використовуються для розширення даних. Схема 430 часу/керування генерує сигнали часу для генераторів 432, 434, які визначають певний час початку ПШ послідовностей. I дані і Qдані(фіг.2, 3) спочатку спектрально розширюються послідовностями ПШ_І, ПШ_Q, після чого модулюються сигналами І_LО і Q_LО. Згідно з винаходом, поворот фази можна виконувати на будь-якій з цих стадій або на обох. На стадії розширення(тобто у перемножувачі 210) поворот фази можна здійснити, повертаючи фази ПШ послідовностей або фази даних, як це було описано. На стадії модуляції поворот фази можна здійснити, повертаючи фази несучих сигналів І_LО і Q_LO. Фіг.5 містить діаграму, що ілюструє поворот фази квадратурних ПШ послідовностей. Послідовності ІПШ і QПШ(входи схеми 438 повороту фази) показані як фазори на горизонтальній і вертикальній осі, відповідно. Послідовності ПШ_І i ПШ_Q(виходи схеми 438 поворот фази) показані штриховими лініями. Різниця фаз між вихідними ПШ послідовностіми(наприклад, ПШ_Q) і вхідними ПШ послідовностями(наприклад, QПШ) відповідають повертанню qROT фази. ПШ_І і ПШ_Q обчислюються за формулами: (4) ПШ_І = [ІПШ x cos(qROT) - QПШ x sin(qROT) (5) ПШ_Q = [ІПШ x sin(qROT) + QПШ х cos(qROT) Типове втілення(фіг.1) передбачає використання двох керуючих сигналів CTRL[1:0]. Один з них(CTRL1) коригує підсилення ПЗП 134. а другий(CTRL0) коригує струм зміщення ПП/ДРВ 136. Кожний набір керуючих значень CTRL[1:0] визначає певний операційний стан передавача. Наприклад, керуючі значення CTRL[1:0] = 00 можуть визначати низьке підсилення і низький операційний стан струму зміщення, значення 01 можуть визначати низьке підсилення і високий операційний стан струму зміщення, а значення 11 - високе підсилення і високий операційний стан струму зміщення Кожний операційний стан може бути пов'язаний з певним поворотом фази модульованого сигналу. Один з таких станів приймається за базовий і йому відповідає нульовий поворот фази Решта операційних станів визначаються через поворот фази відносно цього базового стану. Наприклад, операційні стани 00, 01, 11 можуть бути пов'язані з поворотами фази відповідно, 0, p/2, p і 3p/2. Під час корекції або встановлення режиму передавача у новий операційний стан визначається поворотом фази, що відповідає цьому новому операційному стану. Після цього фази ПШ послідовностей повертаються на цю визначену величину для компенсації повороту фази, викликаного роботою елементів схеми у новому операційному стані. Поворот ПШ послідовностей виконується приблизно одночасно з корекцією елементів схеми. Приблизно одночасним поворотом фази модульованого сигналу на величину, приблизно внесену елементами схеми, але у протилежному напрямку, знижується розірваність фази у модульованому сигналі. Кожний операційний стан, визначений керуючими сигналами CTRL[1:0], відповідає одному з чотирьох можливих поворотів фази. У простому втіленні значеня цих поворотів становлять 0, p/2, p і 3p/2 і ідентифікуються сигналами PHASE[1:0]. У такому втіленні повернуті за фазою послідовності ПШ_I і ПШ_Q можуть бути одержані з вхідних послідовностей ІПШ і QПШ згідно з таблицею 1. Таблиця 1 PHASE[1:0] 00 01 10 11 Поворот фази 0 p/2 p 3p/2 ПШ_I ПШ_Q ІПШ -QПШ -ІПШ QПШ QПШ ІПШ -QПШ -ІПШ У процесі обрання нового операційного стану, визначеного керуючими сигналами CTRL[1:0], визначається поворот фази, який відповідає цьому операційному стану. Відображення операційних станів на значення повороту фази можна здійснити за допомогою довідкової таблиці, комбінаторною логікою або у інший спосіб. Після цього коригуються послідовності ПШ_І і ПШ_Q згідно з вимогами і значеннями, визначеними сигналами PHASE[1:0], і виконується бажаний поворот фази. Фіг.6 містить блок-схему типового втілення схеми 438а повороту фази, яка реалізує поворот фази згідно з таблицею 1. У цьому втіленні кожному операційному стану відповідає одне з чотирьох можливих значень повороту фази. Керуючі сигнали CTRL[1:0] визначають певний операційний стан, а сигнали PHASE[1:0] ідентифікують відповідне значення повороту фази. Керуючі сигнали CTRL[1:0] надходять на регістр 462, який працює згідно з тактовими сигналами CLK. Значення з регістра 462 надходять до довідкової таблиці 644, яка визначає значення повороту фази, пов'язане з операційним станом, визначеним прийнятими сигналами CTRL[1:0]. Значення повороту фази визначається сигналами PHASE[1:0], Згідно з таблицею 1, при нульовому значенні повороту фази послідовності ПШ_І і ПШ_Q є ідентичними послідовностям ІПШ і QПШ відповідно. Для повороту фази p/2, p і 3p/2 послідовності ІПШ і QПШ перетворюються. При поворотах p/2 і 3p/2 послідовність ІПШ зазнає інверсії, а послідовність QПШ зазнає інверсії при поворотах p/2 і p. Для реалізації цих співвідношень використовуються логічні елементи 646 "Виключаюче АБО"(XOR) і мультиплексори 648. Сигнал PHASE 1 надходить до одного з входів елемента 646а XOR, а до другого входа цього елемента надходить послідовність ІПШ. Елемент 646а здійснює інверсію послідовності ІПШ, коли поворот фази становить p/2 або 3p/2. Вихід елемента 646а XOR надходить до нульового входу мультиплексора 648а і до одиничного входу мультиплексора 648b. Сигнали PHASE[1:0] надходить входів елемента 646b. Коли поворот фази становить p/2 або p, елемент 646b XOR генерує логічну одиницю, яка використовується для інверсії послідовності QПШ. Вихід елемента 646b надходить до одного з входів елемента 646с XOR, а до другого входа цього елемента надходить послідовність QПШ. Елемент 646с здійснює інверсію послідовності ІПШ, коли поворот фази становить p/2 або p. Вихід елемента 646с XOR надходить до одиничного входу мультиплексора 648а і до нульового входу мультиплексора 648b. Сигнал PHASE0 визначає входи мультиплексорів 648а, 648b для перетворення послідовностей ПШ, коли поворот фази становить p/2 або 3p/2. Регістр 642 одержує також сигнал EN дозволу на оновлення у призначені моменти часу. Цей сигнал може бути використаний для узгодження повороту фази ПШ послідовностей з коригуванням елементів схеми, пов'язаних з каналом передачі сигналу Отже, коли фаза модульованого сигналу повертається внаслідок корекції елементів схеми, здійснюється компенсуючий поворот фази модульованого сигналу, який приблизно усуває поворот фази, зумовлений елементами схеми. Для очищення регістра використовується сигнал RESET(наприклад, логічна одиниця), наприклад, коли програмне забезпечення встановлює біт очищення або коли активізується лінія перевстановлення схеми. У втіленні фіг.6 використовуються два керуючі сигнали CTRL[1:0], кожний з яких діє на один елемент схеми і має значення 0 або 1. Взагалі канал передачі сигналу може включати будь-яку кількість контрольованих елементів схеми, причому кожний з цих елементів може бути корекцією переведений у один з будь-якої кількості станів. Наприклад, може бути бажаним коригувати підсилення ПЗП з розрізненням у чотири біти, а струм зміщення елемента схеми з восьмибітовим розрізненням. Кожний з встановлених режимів елементів схеми відповідає певному операційному стану каналу передачі сигналу. Хоча кожному операційному стану відповідає певний поворот фази, може бути бажаним забезпечувати компенсуючий поворот фази лише для частини можливих операційних станів. Наприклад, хоча струм зміщення елемента схеми може коригуватись з восьмибітовим розрізненням, може виявитись бажаним забезпечити компенсуючий поворот фази для восьми операційних станів, що визначаються трьома найбільш значущими бітами керуючого сигналу для цього елемента схеми. Взагалі кожний керуючий сигнал може бути використаний для корекції певної характеристики одного або кількох елементів схеми. Наприклад, може виявитись бажаним коригувати підсилення двох ПЗП у каналу передачі сигналу одним керуючим сигналом. Для спрощення Μ керуючих сигналів для Μ або більше елементів схеми, у яких бажано компенсувати поворот фази, конкатенуються у N біт (Μ £ Ν). Фіг.7 містить блок-схему типового втілення схеми 438b повороту фази, яка може бути використана для генерування будь-якої кількості значень поворот фази. N біт керуючих сигналів CTRL[1:0] надходять на регістр 742, який працює згідно з тактовим сигналом CLK. Значення з регістра надходить до довідкової таблиці 744, яка дає значення поворот фази, що відповідає операційному стану, визначеному керуючими сигналами. У цьому втіленні у довідковій таблиці 744 зберігаються L значень повороту фази. Кожному операційному стану, визначеному керуючими сигналами CTRL[N-1:0], відповідає одне з цих L значень. Кожне значення повороту фази зберігається у таблиці 744 з розрізненням Ρ біт і ідентифікує певний поворот фази у межах 0 - 2p. Одержане з таблиці 744 значення qF повороту фази, яке відповідає прийнятим керуючим сигналами CTRL[N-1:0], надсилається до комплексного перемножувача 746, який також приймає послідовності ІПШ і QПШ. Комплексний перемножувач 746 перемножує прийняті ПШ послідовності на відповідні синус і косинус одержаного значення qF повороту фази(рівняння (4, 5)) для генерування ПШ послідовностей з повернутою фазою. У рівняннях(4, 5) змінна qROT має бути заміщена змінною qF. Перемножувач 746 формує з вхідних послідовностей ІПШ і QПШ вихідні послідовності ПШ_І і ПШ_Q, що зазнали поворот фази у межах 0 - 2p. Комплексний перемножувач 746 може бути реалізований логікою, довідковою таблицею або іншою схемою і може бути інтегрований з довідковою таблицею 744. Кожна з послідовностей ІПШ і QПШ має розрізнення у один біт. Кожна з вихідних послідовностей перемножувача 746 може мати К-бітове розрізнення. Комплексний перемножувач 746 може бути втілений у вигляді довідкової таблиці, яка містить 2К x 2Ρ+2 біт. Оскільки вихідні ПШ послідовності є синусоїдальними, довідкову таблицю можна спростити зберіганням лише одного квадранта синусоїди і побудовою на базі цього квадранта трьох інших. Фіг.7 містить також механізм такого вирівнювання керуючих сигналів, що надходять до елементів схеми, яке забезпечує зниження розірваності фази модульованого сигналу при коригувані цих елементів. Керуючі сигнали CTRL[N-1:0] надходять до елемента затримки 748, який затримує кожний з цих сигналів на належну тривалість. Сигнали керування зсувом для ПП/ДРВ 136(фіг.1) можуть бути затримані трохи більше, ніж сигнали керування підсиленням ПЗП 132, для компенсації затримки ПЗП 134. Затримані керуючі сигнали від елемента 748 затримки надходять до елементів схеми. Як уже відзначалось, поворот фази можна здійснювати у різних місцях каналу передачі сигналу. Наприклад, поворот фази можна здійснити на комплексних даних(І дані, Qдані), на комплексних ПШ послідовностях(ІПШ, QПШ) або на сигналах-носіях(І_LО, Q_LO), Ці форми поворот фази репрезентуються як: s(t) = Re{m(t) x p(t) x exp(vct) ехр(jqROT)} (6) = Re{m(t) x [p(t) x exp(jvct)] exp(jqR0T)} = Re{[m(t) x exp(jqROT)] x p(t) x exp(jvct)]} = Re{m(t) x p(t) x exp(jv ct)} де s(t) - вихідний модульований сигнал, m(t) - послідовність даних, p(t) - ПШ послідовність і exp(jvct) - несучий сигнал. Фіг.8А, 8В містять блок-схеми двох втілень поворот фази згідно з винаходом. Фіг.8А ілюструє поворот фази розширених даних, а фіг.8В - поворот фази розширюючих ПШ послідовностей. Розширювач 810(фіг.8А) приймає і розширює комплексні дані(I дані, Qдані) комплексними ПШ послідовностями(ІПШ, QПШ) і надсилає розширені дані фазообертача 812, який приймає також сигнал, що визначає бажаний поворот фази(qROT), і повертає фазу розширених даних на qROT. Цей поворот фази можна виконувати у цифровій формі на стадії модуляції, як це було описано вище. На фіг.8В схема 820 повороту фази приймає комплексну ПШ послідовність(ІПШ i QПШ), повертає її фазу на qROT і надсилає повернуті ПШ послідовності(ПШ_І, ПШ_Q) до розширювача 822, який приймає і розширює комплексні дані(I дані, Qдані) комплексною ПШ послідовністю(ПШ_І, ПШ_Q), генеруючи розширені дані. У деяких втіленнях(наприклад, поворот фази інкрементами у 90°) таке рішення спрощує обчислення, оскільки ПШ послідовності звичайно мають однобітове розрізнення і для одержання повороту фази потрібні прості схеми, описані вище. Значення повороту фази модульованого сигналу, викликаного корекцією елементів схеми, може бути визначено різними засобами, наприклад, моделюванням, емпіричними вимірюваннями у передавачі та ін. Фаза модульованого сигналу визначається для кожного операційного стану, визначеного керуючими сигналами CTRL[1:0] Обирається базовий операційний стан, i фаза, пов'язана з кожним іншим операційним станом, порівнюється з фазою основного стану для визначення значення повороту фази для цього операційного стану. Отже, кожному операційному стану відповідає певне значення повороту фази. У одному з втілень поворот фази для різних операційних станів зберігається у довідковій таблиці. Ця таблиця заповнюється при ініціалізації передавача або за сигналом на перевстановлення. У іншому варіанті значення повороту фази одержується з системної шини(тобто від іншої інтегральної схеми) з кожною змінною стану керуючими сигналами. Згідно з наведеним описом, компенсація повороту фази забезпечується поворотом фази ПШ послідовностей. Це можна зробити також поворотом даних, наприклад, I дані і Qдані(фіг.2). У деяких передавачах дані можуть мати вище розрізнення, ніж ПШ послідовності, і тоді поворот ПШ послідовностей вимагає більш простих схем. Компенсація повороту фази може бути здійснена у інших точках каналу передачі сигналу, наприклад, можна повертати фазунесучі сигнали, що модулюють дані. На фіг.3 фільтровані дані І i Q модулюються фазним(I_LO) і квадратурним(Q_LO) сигналами-носіями у модуляторі, що складається з перемножувачів, відповідно, 320а і 320b. Для повороту фази на стадії модуляції можна повертати фази фазного і квадратурного несучих сигналів для одержання бажаногоповороту фази модульованого сигналу. У деяких втіленнях винаходу поворот фази здійснюється у цифровій формі, що спрощує узгодження у схемі. Це дозволяє повертати фазу дискретними кроками, хоча розмір кроку може бути різним залежно від розрізнення сигналу PHASE. Поворот фази можна також виконувати на аналогових сигналах(наприклад, на стадії модуляції), У цьому випадку компенсація повороту фази може бути більш безперервною. Елементи фіг.1 можуть мати різне виконання. Цифрові елементи(наприклад, кодер 114, розширювач 118) можуть бути виконані схемно або програмно на процесорі(наприклад, на контролері 116), або комбіновано. Контролер 116 може бути мікрокомп'ютером, мікропроцесором, процесором, процесором сигналів, спеціалізованою інтегральною схемою(ASIC) або іншим електронним пристроєм, призначеним виконувати описані вище функції. Довідкові таблиці можуть знаходитись у пам'яті з довільним доступом(RAM), у динамічній RAM(DRAM), ROM, програмованій ROM, електронно програмованій ROM(EPROM), FLASH-пам'яті, інших пристроях пам'яті та їх комбінаціях. Керуючі сигнали(фіг.1) CTRL[1:0] коригують характеристики елементів схеми, розташованих безпосередньо у каналі передачі. Винахід може бути також застосований для компенсації повороту фази, викликаного корекцією інших елементів, розташованих поза каналом передачі. Наприклад, керований напругою генератор і пов'язаний з ним буфер можуть зазнавати корекції їх струмів зміщення для зниження споживання енергії. Корекція струмів зміщення цих елементів може змінювати фазу сигналу цього генератора і, отже, викликати поворот фази модульованого сигналу. Отже, така корекція роботи цих елементів потребує компенсації повороту фази модульованого сигналу. Винахід може знайти застосування у багатьох системах зв'язку, наприклад, у існуючих системах з ПДКУ, а також у системах, що знаходяться у розробці. Приклад системи ПДКУ можна знайти у вже згаданій заявці 08/963 386 на патент США. Ця система включає у передавальних вузлах базової і мобільної станцій розширювач, який спектрально розширює дані парою ПШ послідовностей, як це було описано вище. Іншу систему з ПДКУ описано у вже згаданих патентах США 4 901 307 і 5 103 459. Винахід є особливо придатним для використання у мобільній станції системи ПДКУ, де необхідно коригувати потужність передачі у широких межах(наприклад, 85дБ). Мобільна станція може мати елементи схеми зі змінним підсиленням і з регулюванням струму зміщення для зниження споживання потужності і подовження терміну служби вузла. Винахід може бути застосований також у інших системах зв'язку з іншими схемами модуляції, включаючи ПДРЧ, ПДЧР, ЧМ і AM, наприклад, AM з амплітудним компандуванням на одній бічній смузі. Винахід може бути застосований також у інших системах передачі, наприклад у телевізійному мовленні, пейджерних системах та ін. Винахід можна використати для корекції фази модульованого сигналу, викликаної фазовим зсувом, внесеним елементами схеми, пов'язаними з каналом передачі сигналу. У процесі корекції елементів схеми фаза модульованого сигналу може бути зсунута для компенсації зсуву фази, внесеного цими елементами, для зниження розірваності фази модульованого сигналу. Наведений вище опис бажаних втілень дозволить будь-якому фахівцю використати винахід, зробивши належні модифікації і зміни згідно з концепціями і принципами винаходу Об'єм винаходу не обмежується наведеними втіленнями і визначається новими принципами і ознаками.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for shifting the phase of a modulated signal and a device for the realization of the method
Автори англійськоюBlack Peter J., Black, Peter, J., Black, Peter J.
Назва патенту російськоюСпособ сдвига фазы модулированного сигнала (варианты) и стройство для осуществления способа
Автори російськоюБлек Питер Дж.
МПК / Мітки
МПК: H04B 1/707, H03F 1/32, H04L 27/34
Мітки: варіанти, спосіб, пристрій, здійснення, фазі, обертання, модульованого, сигналу
Код посилання
<a href="https://ua.patents.su/9-67861-sposib-obertannya-fazi-modulovanogo-signalu-varianti-i-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб обертання фази модульованого сигналу (варіанти) і пристрій для його здійснення</a>
Спосіб вимірювання тимчасової затримки модульованого сигналу при його проходженні окремими каналами розповсюдження та пристрій для його здійснення
Номер патенту: 42816
Опубліковано: 15.11.2001
Автори: Лігінов Сергій Михайлович, Литвиненко Валентин Іванович, Сорочан Анатолій Григорович
МПК: G01S 3/00
Мітки: сигналу, каналами, пристрій, розповсюдження, спосіб, тимчасово, модульованого, проходженні, вимірювання, затримки, окремими, здійснення
Формула / Реферат:
1.Спосіб вимірювання тимчасової затримки модульованого сигналу при його - проходженні окремими каналами розповсюдження, містить регульовану калібровану затримку сигналу першого каналу, який відносять по частоті на частоту гетеродина wr і затрмують на сталу величину
Спосіб виміру девіації частоти гармонічного сигналу та пристрій для його здійснення
Номер патенту: 35945
Опубліковано: 16.04.2001
Автори: Троцишин Іван Васильович, Пивовар Олег Сергійович
МПК: G01R 25/00, G01R 23/00
Мітки: спосіб, сигналу, гармонічного, пристрій, здійснення, девіації, частоти, виміру
Формула / Реферат:
1. Спосіб вимірювання девіації частоти, оснований на перенесенні спектру модулюючого сигналу на проміжну частоту, виділенні різницевої частоти у частотно-модульованого сигналу та визначенні числа нулів перетвореного сигналу, який відрізняється тим, що додатково вимірюють фазовий зсув між модульованим сигналом та немодульованою несучою на початку та наприкінці інтервалу виміру, що кратний половині періоду синхронно із вимірюванням кількості...
Спосіб створення допоміжного пілот-сигналу, спосіб його прийому і пристрій для його здійснення та спосіб індивідуальної передачі
Номер патенту: 63963
Опубліковано: 16.02.2004
Автори: Оденвалдер Джозеф П., Ландбі Стайн А., Тідеманн Едвард Г., мол.
МПК: H04B 1/707, H04B 7/26, H04J 11/00
Мітки: спосіб, створення, пілот-сигналу, передачі, пристрій, прийому, індивідуальної, допоміжного, здійснення
Формула / Реферат:
1. Спосіб створення допоміжного пілот-сигналу, який передбачає операції: прийому пілотних даних і покриття зазначених пілотних даних пілотною послідовністю Уолша, яку утворюють конкатенацією основної послідовності Уолша і її комплементарної послідовності.2. Спосіб за п. 1, який відрізняється тим, що зазначена основна послідовність Уолша є послідовністю нулів.3. Спосіб за п. 1, який відрізняється тим, що зазначена основна...
Пристрій для захищеного від маніпуляцій прийому амплітудно-модульованого сигналу
Номер патенту: 57096
Опубліковано: 16.06.2003
Автор: Райнер Роберт
МПК: G06K 19/07, G06K 7/10, H04L 27/06
Мітки: маніпуляцій, амплітудно-модульованого, захищеного, пристрій, прийому, сигналу
Формула / Реферат:
1. Схемний пристрій для прийому амплітудно-модульованих сигналів, зокрема для застосування в носіях даних системи ідентифікації, який містить демодулятор (Demod), під'єднаний після нього декодер (Decod), вузол керування (SM) для керування процесами прийому, демодуляції і обробки прийнятих даних,який відрізняється тим, що між демодулятором (Demod) і декодером (Decod) ввімкнено керований вузлом керування (SM)...
Спосіб вимірювання відносної часової затримки сигналу з кутовою модуляцією при його проходженні роздільними каналами розповсюдження і пристрій для його здійснення
Номер патенту: 42074
Опубліковано: 15.10.2001
Автори: Литвиненко Валентин Іванович, Лігінов Сергій Михайлович, Сорочан Анатолій Григорович
МПК: G01S 3/00
Мітки: сигналу, кутовою, модуляцією, розповсюдження, відносної, проходженні, роздільними, пристрій, затримки, спосіб, каналами, здійснення, вимірювання, часової
Формула / Реферат:
1. Спосіб вимірювання відносної часової затримки t сигналу з кутовою модуляцією, при його проходженні роздільними каналами розповсюдження, який включає регульовану калібровану затримку q сигналу першого каналу, який розгалужують на дві частини, одну частину сигналу зсувають по частоті на частоту гетеродина wг і затримують на постійну часу t0 , одержаний сигнал перемножують з другою частиною сигналу, після чого виділяють на частоті wг сигнал...
Попередній патент: Спосіб шифрування і дешифрування даних
Наступний патент: Спосіб виконання ортогональних перетворень зображень по базису хаара
Випадковий патент: Живильне середовище для вирощування штаму м-81 hirschioporus laricinus-продуцента молокозгортаючого ферменту