Спосіб підповерхневого радіолокаційного зондування
Номер патенту: 68520
Опубліковано: 16.08.2004
Автори: Куранов Ніколай Пєтровіч, Сугак Володимир Григорович, Дорохова Людмила Миколаївна, Кузьмін Володимир Вікторович

Формула / Реферат
1. Спосіб підповерхневого радіолокаційного зондування, який включає випромінювання частотно-модульованого зондувального сигналу, приймання відбитого сигналу і розрахунок швидкості поширення радіохвиль у зондованому середовищі, який відрізняється тим, що зондувальний сигнал формують у вигляді квазінеперервного сигналу з покроковою зміною частоти в заданому діапазоні частот, вимірюють функціональну залежність згасання відбитого сигналу від частоти в зондованому середовищі і для кожного з шарів зондованого середовища перед розрахунком швидкості поширення радіохвиль визначають функціональну залежність діелектричної проникності ґрунту від частоти і функціональну залежність питомої провідності ґрунту від частоти, причому функціональну залежність питомої провідності ґрунту від частоти визначають шляхом розв'язання рівняння
де ![]() - функціональна залежність питомої провідності зондованого шару від частоти, яка входить в підінтегральний вираз;
- функціональна залежність питомої провідності зондованого шару від частоти, яка входить в підінтегральний вираз;
x – змінна інтегрування;
![]() - миттєве значення колової частоти;
- миттєве значення колової частоти;
![]() - функціональна залежність питомої провідності зондованого шару від частоти при х=
- функціональна залежність питомої провідності зондованого шару від частоти при х=![]() ;
;
![]() і
і ![]() - нижня і верхня межі заданого діапазону частот відповідно;
- нижня і верхня межі заданого діапазону частот відповідно;
![]() - функціональна залежність погонного коефіцієнта згасання відбитого сигналу від частоти в зондованому шарі;
- функціональна залежність погонного коефіцієнта згасання відбитого сигналу від частоти в зондованому шарі;
![]() - магнітна проникність середовища;
- магнітна проникність середовища;
![]() - діелектрична проникність вакууму.
- діелектрична проникність вакууму.
2. Спосіб за п. 1, який відрізняється тим, що після визначення функціональної залежності питомої провідності ґрунту від частоти розраховують функціональну залежність діелектричної проникності ґрунту від частоти за формулою
де ![]() - функціональна залежність дійсної частини комплексної діелектричної проникності від частоти;
- функціональна залежність дійсної частини комплексної діелектричної проникності від частоти;
![]() - функціональна залежність питомої провідності зондованого шару від частоти, яка входить в підінтегральний вираз;
- функціональна залежність питомої провідності зондованого шару від частоти, яка входить в підінтегральний вираз;
x – змінна інтегрування;
![]() - миттєве значення колової частоти;
- миттєве значення колової частоти;
![]() і
і ![]() - нижня і верхня межі заданого діапазону частот відповідно.
- нижня і верхня межі заданого діапазону частот відповідно.
3. Спосіб за п. 1, який відрізняється тим, що розрахунок швидкості поширення радіохвиль у середовищі проводять для кожного з шарів зондованого середовища за формулою
де ![]() - фазова швидкість поширення радіохвиль у зондованому шарі;
- фазова швидкість поширення радіохвиль у зондованому шарі;
![]() - магнітна проникність середовища;
- магнітна проникність середовища;
![]() - діелектрична проникність вакууму;
- діелектрична проникність вакууму;
![]() - функціональна залежність діелектричної проникності зондованого шару від частоти;
- функціональна залежність діелектричної проникності зондованого шару від частоти;
![]() - функціональна залежність питомої провідності зондованого шару від частоти;
- функціональна залежність питомої провідності зондованого шару від частоти;
![]() - миттєве значення колової частоти.
- миттєве значення колової частоти.
Текст
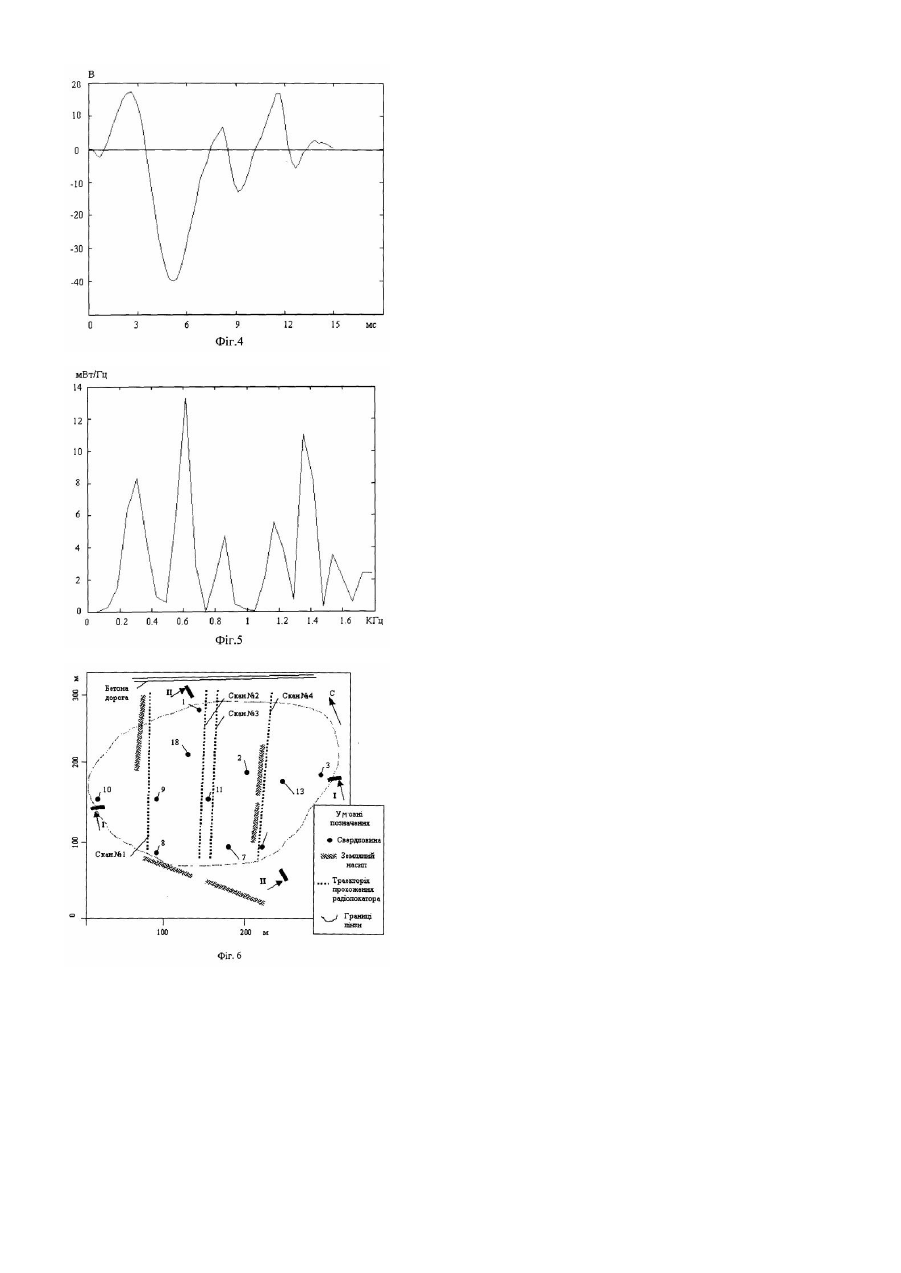
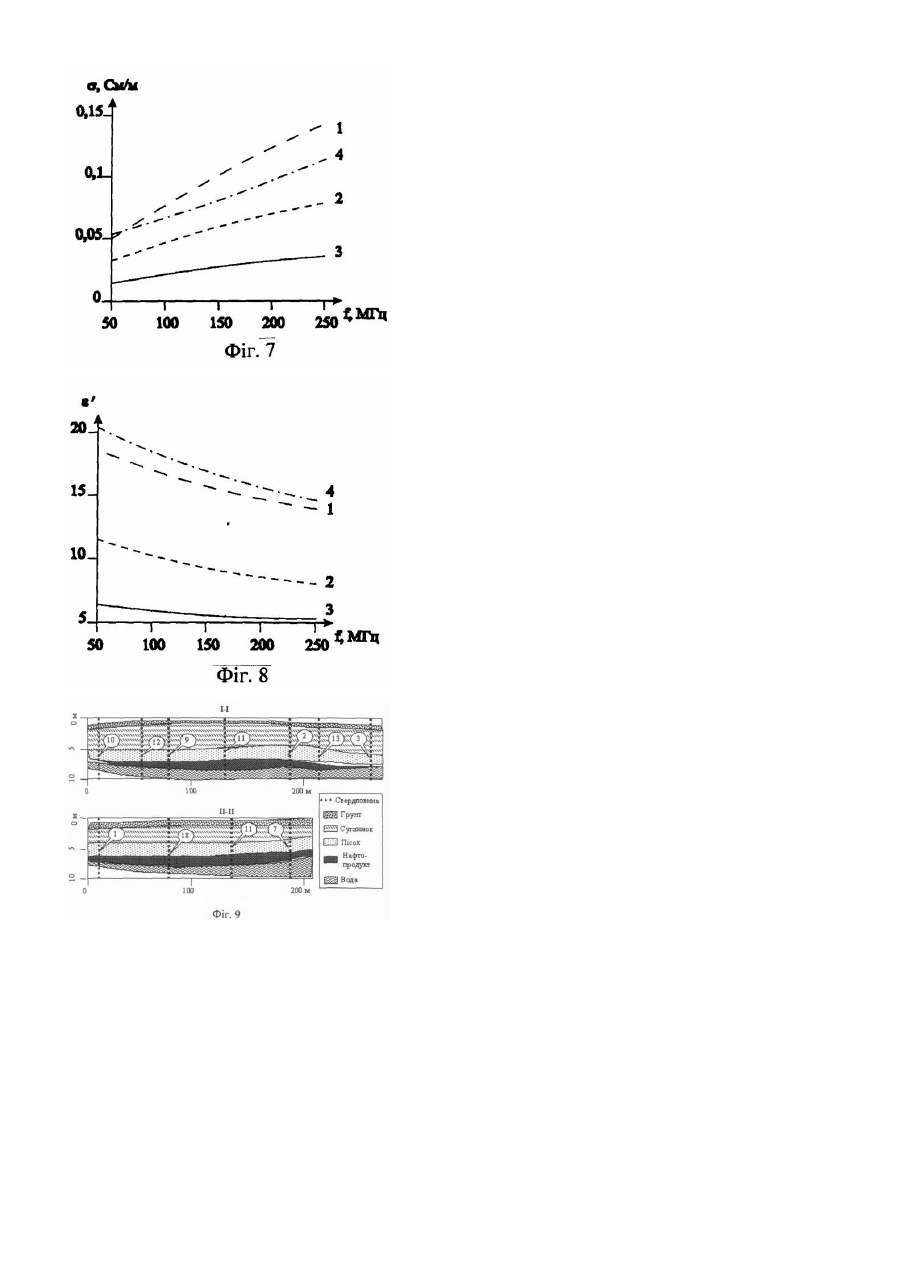
Винахід належить до радіолокації і може бути застосований для розвідки корисних копалин, а також для пошуку інженерних комунікацій та прихованих у землі неоднорідностей. Відомий спосіб підповерхневого радіолокаційного зондування, який включає випромінювання неперервного частотно-модульованого сигналу, приймання відбитого сигналу та вимірювання частоти биття між випромененим і відбитим сигналами, яка є функцією дальності. При симетричному пилкоподібному законі модуляції з періодом Тм на виході приймача виділяють перетворений (обвідну биття) сигнал з періодом Тм , в якому стрибки фази відбуваються через Тм /2. Частота коливань (частота биття) в межах більшої частини кожного інтервалу Тм /2 дорівнює Fбо = ( 4DfмFм / c )D, (1) де D fм - девіація частоти (різниця між максимальною і мінімальною миттєвими частотами); Fм =1/Тм - частота модуляції; с - швидкість світла у вакуумі; D - відстань до цілі. Спектр такого сигналу при достатньо великій тривалості вимірювання складається з дискретних спектральних ліній з періодом Тм , розташованих на частотах nFм . Максимум обвідної дорівнює Fбо і не обов'язково збігається з nFм , оскільки частота биття може бути не кратною Fм (М.И. Финкельштейн, А.Л.Мендельсон, В.А.Кутев. Радиолокация слоистых земных покровов. М., ”Советское радио”, 1977, с.103-106). Недоліком відомого способу підповерхневого радіолокаційного зондування є властива йому постійна похибка вимірювання відстаней, зменшення якої може досягатися збільшенням девіації D fм частоти. Однак при цьому не забезпечується потрібна точність вимірювання малих відстаней. Відомі спеціальні методи зменшення постійної похибки призводять до ускладнення схеми і конструкції радіолокатора та до збільшення тривалості аналізу. Відомий також спосіб підповерхневого радіолокаційного зондування, який включає випромінювання імпульсного несинусоїдального зондувального сигналу у вигляді періодичної послідовності відеоімпульсів тривалістю імпульсу менш ніж 1нс, приймання відбитого від підземного об'єкта ехо-сигналу і вимірювання його тривалості. Глибину залягання об'єкта в землі визначають шляхом розв'язання трансцендентного рівняння, яке пов'язує глибину залягання об'єкта в землі з тривалістю імпульсу ехо-сигналу. Діелектрична проникність e і провідність s ґрунту на відповідній частоті при розв'язанні рівняння вважаються відомими (патент України №15171, MKB G01S17/06, 1997). У вищезазначеному способі підповерхневого радіолокаційного зондування точність визначення глибини залягання неоднорідностей залежить від достовірності апріорної інформації щодо літологічного складу порід та їх електричних характеристик, оскільки при розв'язанні трансцендентного рівняння припускається, що діелектрична проникність e і провідність s ґрунту, які входять до рівняння, відомі. Проте апріорна інформація, одержана відомими методами, наприклад, бурінням або за допомогою датчиків, має доволі велику похибку, оскільки вибірка зразків здійснюється дискретно і з порушенням природного стану ґрунту. За прототип пропонованого способу обрано спосіб підповерхневого радіолокаційного зондування, який включає випромінювання частотно-модульованого зондувального сигналу, приймання відбитих від границь розділу шарів сигналів, вимірювання часу запізнення відбитих сигналів і розрахунок швидкості поширення радіохвиль у зондованому середовищі. Зондувальні сигнали у вигляді імпульсних сигналів з внутрішньоімпульсною частотною модуляцією отримують шляхом модуляції пилкоподібною напругою вихідного частотно-модульованого сигналу. Зміною амплітуди пилкоподібної напруги задають крутість наростання частоти вихідного сигналу, що дозволяє послідовно переглядати поперемінні шари зондованого середовища. Відбитий сигнал приймають у двох рознесених точках двома антенами, що розташовані одна від одної на відстані, співмірній з глибиною зондування. Час запізнення відбитого сигналу вимірюють у кожній з точок прийому. Швидкість Vcp поширення радіохвиль у зондованому середовищі розраховують за формулою 1 vcp = (L2 - L2 ) / (t 2 )2 - (t1)2 , (2 ) 2 1 2 где vc p - гр упова швидкість поширення радіохвиль у зондованому середовищі; L1 - відстань між передавальною антеною і першою приймальною антеною; L2 - відстань між передавальною антеною і другою приймальною антеною; t1 - час затримки поширення сигналу від передавальної антени до першої приймальної антени; [ ] t2 - час затримки поширення сигналу від передавальної антени до другої приймальної антени. Знаючи швидкість поширення радіохвиль, визначають глибину залягання границі розділу шарів (патент Російської Федерації №2100825, MПK G01S13/95, 27.12.97). Недоліком прототипу є недостатньо висока точність визначення границі розділу шарів зондованого середовища, що зумовлене наступним. По-перше, відомий спосіб заснований на вимірюванні часу затримки відбитого імпульсного сигналу, що обмежує частоту прямування зондувальних імпульсів, тоді як збільшення частоти прямування імпульсів сприяє підвищенню вірогідності виявлення підземного об'єкта. По-друге, в формулі (2) для розрахунку швидкості поширення радіохвиль у зондованому середовищі не враховано, що шля хи проходження зондувальних і відбитих сигналів різні і, отже, можуть різнитися складом порід. Тому для достовірної інтерпретації результатів вимірювання потрібна інформація щодо літологічного складу порід усієї зондованої ділянки. І, по-третє, керування крутістю наростання частоти зондувального сигналу супроводжується зміною ширини спектра сигналу, а у дисперсійному середовищі це спричиняє додаткові неконтрольовані спотворення сигналу і в результаті - зниження точності визначення глибини залягання об'єкта. В основу винаходу поставлено задачу удосконалення способу підповерхневого радіолокаційного зондування шляхом застосування зондувального сигналу у вигляді квазінеперервного сигналу з покроковою зміною частоти і визначення діелектричної проникності і питомої провідності ґрунту за результатами вимірювання згасання відбитого сигналу для одержання технічного результату у вигляді підвищення точності визначення глибини границі розділу між шарами ґрунту, і, отже, глибини залягання підземного об'єкта. Для вирішення поставленої задачі у способі підповерхневого радіолокаційного зондування, який включає випромінювання частотно-модульованого зондувального сигналу, приймання відбитого сигналу і розрахунок швидкості поширення радіохвиль у зондованому середовищі, згідно з винаходом, зондувальний сигнал формують у вигляді квазінеперервного сигналу з покроковою зміною частоти в заданому діапазоні частот, вимірюють функціональну залежність згасання відбитого сигналу від частоти в зондованому середовищі і для кожного з шарів зондованого середовища перед розрахунком швидкості поширення радіохвиль визначають функціональну залежність діелектричної проникності грунту від частоти і функціональну залежність питомої провідності грунту від частоти, причому функціональну залежність питомої провідності грунту від частоти визначають шляхом розв'язання рівняння 2 p wв òx wн s( x) 2 - w2 dx = ms2 (w) 4 e 0a 2 (w) a 2( w) e0mw2 - 1 (3 ) , де: s(w) - функціональна залежність питомої провідності зондованого шару від частоти; a (w) - функціональна залежність погонного коефіцієнта згасання відбитого сигналу від частоти в зондованому шарі; m - магнітна проникність середовища; e 0 - діелектрична проникність вакууму; w - миттєве значення колової частоти; wн і wв - нижня і верхня межі заданого діапазону частот відповідно. Крім того, згідно з винаходом, після визначення функціональної залежності питомої провідності грунту від частоти розраховують функціональну залежність діелектричної проникності грунту від частоти за формулою wв ò e ' (w) - 1 = 2 / p s( x) /( x2 - w2 )dx, (4 ) wн де e ' (w) - функціональна залежність дійсної частини комплексної діелектричної проникності від частоти; a ( x) - функціональна залежність питомої провідності зондованого шару від частоти; w - миттєве значення колової частоти; wн і wв - нижня і верхня межі заданого діапазону частот відповідно. При цьому, згідно з винаходом, розрахунок швидкості поширення радіохвиль у середовищі проводять для кожного з шарів зондованого середовища за формулою æ ö s2 (w ) n (w) = w me0e( w)ç 1 + 2 + 1÷ , (5) ç ÷ 2 ç ÷ w (e 0e( w)) è ø n (w) - фазова швидкість поширення радіохвиль у зондованому шарі; де m - магнітна проникність середовища; e 0 - діелектрична проникність вакууму; e(w) - функціональна залежність діелектричної проникності зондованого шару від частоти; s(w) - функціональна залежність питомої провідності зондованого шару від частоти; w - миттєве значення колової частоти. Пропонований винахід дозволяє здійснювати підповерхневе зондування з високою точністю при високій швидкості аналізу та обчислення геофізичних параметрів досліджуваного підповерхневого простору. Це зумовлене тим, що визначення глибини розташування об'єкта в землі здійснюється з урахуванням реальної зміни швидкості поширення зондувального і відбитого сигналів у грунті, оскільки за результатами вимірювання погонного коефіцієнта згасання відбитого сигналу шля хом розв'язання нелінійного інтегрального рівняння (3) визначають функціональну залежність питомої провідності грунту від частоти, після чого розраховують функціональну залежність діелектричної проникності грунту від частоти і швидкість поширення радіохвиль у кожному шарі зондованого середовища. При цьому винахід дозволяє одержувати інформацію щодо електричних характеристик зондованої ділянки землі безпосередньо в процесі зондування і не потребує проведення попередніх робіт для вивчення літологічного складу порід. Розрахунок функціональної залежності діелектричної проникності і питомої провідності грунту від частоти і швидкості поширення радіохвиль для другого і наступних шарів грунту проводять з урахуванням результатів розрахунку ци х параметрів для попереднього шару грунту. Застосування зондувального сигналу з покроковою модуляцією частоти дозволяє одержувати більш чіткі зображення підповерхневої стр уктури грунту у порівнянні з прототипом за рахунок зниження рівня хибних відкликів, зумовлених перехідними процесами при проходженні імпульсів через ланки приймальнопередавальних трактів. Крім точного визначення границь розділу шарів грунту винахід дозволяє здійснювати узагальнену фільтрацію зображення і одержувати замість радіояскравісних зображень зображення електричних властивостей грунту в кожному елементі розрізнення. Це дає змогу діставати якісно нову інформацію про результати підповерхневого зондування, а саме інформацію щодо фізичних власти востей грун ту під поверхневої стр уктури землі. Додатковою перевагою пропонованого винаходу є невисока вартість як технології, так і апаратури для реалізації винаходу, а також можливість одержання карт стану фізичних властивостей грунту на основі інформації щодо електричних характеристик його шарів. Суть винаходу пояснюється кресленням, де подані: фіг. 1 - структурна схема РЛС, що реалізує пропонований спосіб; фіг. 2 - діаграма сигналу на виході генератора частотно-модульованого сигналу; фіг. 3 - діаграма сигналу на виході змішувача; фіг. 4 - сигнал на виході змішувача, що відповідає результату зондування в одній точці; фіг. 5 - частотні відклики сигналу, поданого на фіг. 4; фіг. 6 - карта ділянки із схемою проведення підповерхневого зондування; фіг. 7 - відновлена залежність питомої провідності грунту від частоти ; на фіг. 8 - відновлена залежність діелектричної проникності грунту від частоти ; фіг. 9 - переріз лінзи по І-І і ІІ-ІІ на фіг. 6; фіг. 10 радіолокаційне зображення перерізу грунту в місці розташування лінзи. Прикладом реалізації пропонованого способу підповерхневого радіолокаційного зондування може бути РЛС, до складу якої входять антенний блок 1, генератор 2 частотно-модульованого сигналу, змішувач 3, фільтр 4 низької частоти, аналого-цифровий перетворювач (АЦП) 5, блок 6 керування і обчислювач 7 (фіг. 1). Усі блоки пристрою - стандартні. Антенний блок 1 може бути виконаним, наприклад, у вигляді приймальної і передавальної антен, або у вигляді приймально-передавальної антени. Генератором 2 може бути синтезатор частоти на базі, наприклад, мікросхем МС 145193 фірми Motorola. Блок 6 керування може бути виконаний, наприклад, на базі мікропроцесора AT 90S8535 фірми ATMEL. Обчислювачем 7 може бути ПЭВМ. Суть пропонованого способу підповерхневого радіолокаційного зондування полягає в наступному. Спочатку в залежності від поставленої задачі, наприклад, виявлення підземних комунікацій, лінз нафти або води, картографування тощо, обирають діапазон змінення частоти зондувального сигналу і період його дискретизації, інформацію щодо згаданих параметрів запам'ятовують в пам'яті блока 6 керування. Потім формують зондувальний сигнал у вигляді квазінеперевного частотно-модульованого сигналу з покроковою модуляцією частоти. Для цього запускають в роботу генератор 2, на вхід якого з другого виходу блока 6 керування подають інформацію щодо обраного діапазону частоти зондувального сигналу і періоду його дискретизації. На виході генератора 2 одержують частотно-модульований сигнал з покроковою зміною частоти (фіг. 2), який подають на вхід антенного блока 1 і випромінюють під поверхню землі. Зондувальний сигнал поширюється під поверхнею землі, згасаючи в міру поширення, і, зустрічаючи неоднорідність або границю розділу двох середовищ, частково відбивається в різних напрямках, в тому числі і в напрямку антенного блока 1. Відбитий від границі розділу середовищ зондувальний сигнал, прийнятий антенним блоком 1, подають на перший вхід змішувача 3, на др угий вхід якого подають сигнал з виходу генератора 2. Вихідні сигнали змішувача 3 несуть в собі корисну інформацію щодо швидкості змінення фази відбитого сигналу в функції глибини (фіг. 3). Вихідні сигнали змішувача 3 через фільтр 4 низької частоти, АЦП5 і блок 6 керування подають на вхід обчислювача 7 і запам'ятовують в його пам'яті. Обробка результатів вимірювання, а саме: перетворення Фур'є, обчислювання функціональної залежності діелектричної проникності від частоти і питомої провідності від частоти для кожного з шарів грунту, розрахунок швидкості поширення радіохвиль у зондованому середовищі і визначення глибини здійснюється в обчислювач 7. В разі використання зондувального сигналу з покроковою зміною несучої частоти в заданому діапазоні, в результаті застосування перетворення Фур'є до сигналу, який запам'ятали в пам'яті обчислювача 6, одержують спектральне зображення, в якому частота максимумів спектральної щільності відповідає глибині залягання підповерхневих неоднорідностей і швидкості поширення радіохвиль у шарі гр унту над шуканим об'єктом. Після цього виділяють кожний з частотних відкликів, для яких ширина і частота максимуму визначаються девіацією частоти зондувального сигналу, невідомою дисперсійною залежністю фазової швидкості радіохвиль і глибиною залягання об'єкта. Потім для кожного частотного відклику виділяють часовий сигнал. Обвідна кожного з виділених часових сигналів за період Т зондувального сигналу характеризує згасання відбитого сигналу в зондованому шарі грунту, яке визначається як добуток погонного коефіцієнта згасання та подвійної глибини залягання границі розділу. Далі по частоті максимуму першого частотного відклику задають у першому наближенні значення глибини h1 залягання границі об'єкта і визначають функціональну залежність погонного коефіцієнта згасання a 1(w) відбитого сигналу від частоти в першому шарі грунту з урахуванням заданого початкового значення глибини h 1. Після цього переходять до розв'язання нелінійного сингулярного інтегрального рівняння (3), яке було одержане на підставі нижчезазначеного. Відомо, що дійсна e ' (w) і уявна e ' ' (x ) частини комплексної діелектричної проникності пов'язані між собою співвідношенням Крамерса-Кронинга (Л.Д.Ландау и Е.М.Лифшиц. Электродинамика сплошных сред. М., 1959, с. 330): ò e ' (w) - 1 = 2 / p xe' ' ( x ) /( x2 - w2 )dx. (6 ) Також відомо, що функціональна залежність згасання радіохвиль в грунті від частоти відображена таким співвідношенням (Л.Д.Ландау и Е.М.Ли фшиц. Электродинамика сплошных сред. М., 1959, с. 370): æ ö s2 ( w) a (w) = w me0e (w)ç 1+ 2 - 1÷ , (7) ç ÷ ç ÷ w (e 0e( w))2 è ø де m - магнітна проникність середовища; e 0 - діелектрична проникність вакууму; e(w) - функціональна залежність діелектричної проникності зондованого шару від частоти; s(w) - функціональна залежність питомої провідності зондованого шару від частоти; w - миттєве значення колової частоти. Підставивши в формулу (7) залежність e ' (w) через s(w) і a (w), а потім підставивши її в ліву частину рівняння (6), одержуємо таке рівняння: 2 p 0 òx ¥ s(x ) 2 2 -w dx = ms2 (w) 2 4 e0 a (w) a 2 (w) e0 mw2 - 1 (8 ) , де s(w) - функціональна залежність питомої провідності зондованого шару від частоти; a (w) - функціональна залежність згасання відбитого сигналу в зондованому шарі від часто ти; m - магнітна проникність; e 0 - діелектрична проникність; w - миттєве значення колової частоти. Одержане нелінійне сингулярне рівняння має такі особливості. Перша особливість пов'язана з тим, що функція a (w) визначена в смузі частот, в якій здійснюється її вимірювання. Тому межі інтегрування в формулі (3) визначені заданою смугою частот (wн - wв ). Друга особливість полягає у наявності нелінійної правої частини, до складу якої входить невідома шукана функція s(w). Відомо, що розв'язання сингулярних інтегральних рівнянь 2-го роду, до яких належить рівняння (3), може бути одержане шляхом дискретизації і розв'язання системи алгебраїчних рівнянь відносно N невідомих значень шуканої функції s(w) в точках дискретизації wi, де і=0, ..., N-1 (Ф.Д. Гахов. Краевые задачи. М., ”На ука”, 1977, с. 640). При цьому перевага віддається ітераційним процедурам розв'язання, оскільки останні дозволяють спостерігати процес збіжності та оцінювати похибки на кожному кроці ітерації (Дж. Ортега, В.Рейнболдт. Итерационные методы решения нелинейных систем уравнений со многими неизвестными. М.,”Мир”, 1976, 423с.). За частотою максимуму частотного відклику задають в першому наближенні значення глибини h1 залягання об'єкта. Визначають функціональну залежність згасання a (w) відбитого сигналу від часто ти в шарігрунту над об'єктом з урахуванням заданого початкового значення глибини. Для цього визначають загальне згасання відбитого сигналу при проходженні шару гр унту до об'єкта згідно з вищезазначеним і ділять його на подвійну глибину. Виходячи з вищезазначеного, нелінійне сингулярне інтегральне рівняння (3) розв'язують, застосовуючи ітераційну процедуру. Після розв'язання рівняння (3) розраховують фазову швидкість поширення радіохвиль у певному шарі грунту, наприклад, за формулою (5) і обчислюють частотний відклик сигналу для заданої глибини h1 за формулою ¥ 2 æ té b + ct ö (b + ct)2 ù öds, ( 9) æ ú÷ r( t,0) = A (s) expç j êç s ÷ ç cê 2c ø ç 2c2 ú ÷ è ë û÷ è ø -¥ t - часове непогодження відносно очікуваної затримки сигналу s; де A(s) - нормована амплітуда відбитого сигналу; r(t,0 ) - нормована функція непогодження сигналу; ò w0 - початкове значення несучої колової частоти; Td - тривалість випромінювання квазінеперервного сигналу в заданому діапазоні частот; w b= 0, Td с - швидкість світла. Потім порівнюють результат розрахунку з частотним відкликом, одержаним для першої границі розділу шарів грунту в результаті застосування перетворення Фур'є. Обчислюють різницю між оцінками виміряного і розрахованого частотних відкликів з урахуванням знака помилки. Змінюють з урахуванням знака помилки значення глибини h 1 залягання об'єкта пропорційно абсолютній величині похибки і повторюють всю процедуру розрахунку до досягнення мінімального значення середньої помилки, наприклад, до помилки 1-2%. Глибина і питома провідність останнього кроку інтерації вважаються шуканими величинами. Розраховують діелектричну провідність для першого шару гр унту за формулою (4). Швидкість поширення радіохвиль в першому шарі грунту обчислюють з урахуванням розрахованих функцій e(w) і s(w) для першого шару за формулою (5). Повторюють всю процедуру розрахунку для наступного шару гр унту з урахуванням інформації щодо попереднього шару. У цьому випадку у відбитому від другої границі сигналі здійснюється компенсація частотної залежності згасання, обумовлена проходженням зондувальним і відбитим сигналами верхнього шару. Після розрахунку електричних характеристик другого шару і глибини залягання другої границі переходять до наступної і т.п. Винахід ілюструється наступним конкретним прикладом. Було проведено зондування ділянки, розташованої на території колишнього аеродрому, для визначення меж залягання і потужності лінзи, що містить авіаційний гас. Підповерхневе зондування проводили шляхом переміщення РЛС по чотирьох трасах, що перетинали ділянку паралельно одна одній (фіг. 6). Радіолокаційне зображення перерізу грунту, одержане в результаті проходження радіолокатором однієї з трас, подане на фіг. 10, де цифрами позначено: 1 - границя суглинок бурий - суглинок льосовий; 2 - суглинок; 3 - границя суглинок-пісок; 4 - пісок; 5 - границя пісок-пісок, насичений керосином; 6 - пісок, насичений керосином; 7 - рівень ґрунтових вод. Перерізи лінзи по І-І і ІІ-ІІ на фіг. 6 подано на фіг. 9. Глибина розміщення лінзи з нафтопродуктами за даними попереднього буріння не перевищувала 10м, тому задавали діапазон частот від 150 до 250МГц. Формували зондувальний сигнал у вигляді квазінеперервного частотно-модульованого сигналу з покроковим зміненням частоти, період дискретизації заданого діапазону частоти обирали 0,5мс (фіг. 2). Переміщуючи радіолокатор по кожній з трас, випромінювали зондувальний сигнал і приймали відбиті сигнали. У місці залягання великої лінзи, що містить авіаційний гас, на виході змішувача 3 одержували часовий сигнал, поданий на фіг. 4. Після фільтрації і перетворення в цифрову форму ви щезазначений сигнал запам'ятовували в пам'яті обчислювача 7. У результаті застосування перетворення Фур'є до ви щезазначеного сигналу одержували частотні відклики з п'ятьма максимумами (фіг. 5). Перший максимум на частоті 300МГц - це відбиття від границь шарів чорнозему і суглинку ближче до поверхні землі, другий на частоті 600МГц - це границя розділу суглинку і піску, третій максимум на частоті 1400МГц - це границя розділу лінзи з нафтопродуктами, розташованої на рівні ґрунтових вод. Одержана в результаті розрахунку за рівнянням (3) відновлена залежність питомої провідності s від частоти наведена на фіг. 7, а результати розрахунку за рівнянням (4) діелектричної проникності e від частоти подані на фіг. 8. На фігурах 7 і 8 цифрами позначені: 1 - суглинок; 2 - пісок; 3 - пісок, насичений керосином; 4 - замірені залежності електричних характеристик вологого бурого суглинку. Результати розрахунку швидкості поширення радіохвиль в шара х гр унту за формулою 5 подані в таблиці. Номер шару 0 1 2 3 Швидкість поширення радіохвиль, м/с 1,5.108 0,71.108 0,81.108 1,2.108 В результаті зондування було виявлено дві границі розташування забруднення: верхня границя від поверхні землі на глибині 6м, а нижня - на глибині 8м, на рівні ґрунтових вод. Дані, засновані на результатах наступного буріння свердловин, підтвердили результати зондування, одержані з використанням винаходу.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of underground radar sounding
Автори англійськоюSuhak Volodymyr Hryhorovych
Назва патенту російськоюСпособ подповерхностного радиолокационного зондирования
Автори російськоюСугак Владимир Григорьевич
МПК / Мітки
МПК: G01V 3/12, G01S 13/95
Мітки: радіолокаційного, зондування, підповерхневого, спосіб
Код посилання
<a href="https://ua.patents.su/9-68520-sposib-pidpoverkhnevogo-radiolokacijjnogo-zonduvannya.html" target="_blank" rel="follow" title="База патентів України">Спосіб підповерхневого радіолокаційного зондування</a>
Пристрій для радіолокаційного дистанційного зондування
Номер патенту: 37819
Опубліковано: 16.02.2004
Автор: Цимбал Валерій Миколайович
МПК: H04B 1/00, G01D 21/00, G01S 13/00
Мітки: зондування, пристрій, дистанційного, радіолокаційного
Формула / Реферат:
Радіолокаційний пристрій для дистанційного зондування, що містить у своєму складі задавальний генератор, формувач кодової послідовності, модулятор, підсилювач потужності, комутатор прийом/передача, приймальний розгалужувач, а також n приймальних каналів, кожен з яких складається з приймального фільтра, порогового пристрою та приймального ключа, приймальний суматор, приймач та корелятор, причому перший вихід задавального генератора підключено...
Бортовий радіолокатор підповерхневого зондування з пристроєм захисту від пасивних перешкод
Номер патенту: 17472
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: захисту, радіолокатор, перешкод, зондування, бортовий, пасивних, пристроєм, підповерхневого
Формула / Реферат:
Бортовой радиолокатор подповерхностного зондирования с устройством защиты от пассивных помех, содержащий бортовую приемо-передающую антенну, ось которой направлена вертикально вниз, антенный переключатель, передатчик периодических видеоимпульсов наносекундной длительности без несущей частоты, приемник и индикатор, отличающийся тем, что на выходе приемника установлен широкополосный усилитель видеоимпульсов с входным и выходным устройствами...
Спосіб дистанційного вимірювання відносних змін температури повітря за допомогою акустичного зондування атмосфери
Номер патенту: 46524
Опубліковано: 15.05.2002
Автори: Дєлов Іван Акіндінович, Сліпченко Микола Іванович
МПК: G01S 13/00, G01S 13/95
Мітки: вимірювання, допомогою, зондування, відносних, дистанційного, атмосфери, спосіб, змін, повітря, температури, акустичного
Формула / Реферат:
Спосіб дистанційного вимірювання відносних змін температури повітря за допомогою акустичного зондування атмосфери, що включає випромінювання в атмосферу пакета гармонійних коливань повітря, його прийом, перетворення прийнятих звукових коливань в електричні, визначення швидкості звуку, визначення температури, який відрізняється тим, що здійснюють моностатичне зондування атмосфери вертикально чи під кутом до обрію, причому прийом розсіяних...
Спосіб мобільного томографічного обстеження підповерхневого середовища
Номер патенту: 39438
Опубліковано: 15.06.2001
Автори: Кравець Роман Євгенович, Кравець Ігор Іванович
МПК: G01V 3/12
Мітки: середовища, томографічного, обстеження, підповерхневого, мобільного, спосіб
Формула / Реферат:
Спосіб мобільного томографічного обстеження підповерхневого середовища, який полягає в тому, що апаратно-програмний комплекс встановлюють на платформу, проводять електромагнітне зондування підповерхневого середовища, вимірюють амплітудно-фазові та просторові значення зондуючого та перевипромінюваного на неоднорідностях електромагнітних сигналів і обробляють результати зондування, який відрізняється тим, що апаратно-програмний комплекс систем...
Спосіб акустичного зондування атмосфери
Номер патенту: 50860
Опубліковано: 15.11.2002
Автори: Нагібін Ігор Борисович, Васильченко Андрій Олександрович, Риженко Олексій Іванович, Карташов Володимир Михайлович
МПК: G01W 1/00
Мітки: спосіб, зондування, атмосфери, акустичного
Формула / Реферат:
Спосіб акустичного зондування атмосфери, який полягає в випромінюванні в атмосферу акустичних коливань, прийманні акустичних коливань, розсіяних природними неоднорідностями атмосфери, у рознесених точках простору, вимірюванні доплерівських зсувів частоти розсіяних сигналів і визначенні повного вектора швидкості вітру за виміряними значеннями параметрів розсіяних сигналів, який відрізняється тим, що акустичні коливання випромінюють імпульсами...
Попередній патент: Пристрій для вимірювання потенціалу протікання на границі розділу нафта – гірська порода
Наступний патент: Спосіб промивки горна доменної печі
Випадковий патент: Конусна інерційна дробарка