Пристрій керування за допомогою жестів

Формула / Реферат
1. Пристрій керування за допомогою жестів, що містить корпус, виконаний у формі однієї або двох рукавичок для надягання на руки, на поверхні яких є вбудовані контактні датчики, щонайменше один акселерометр, джерело живлення, блок обробки та приймання/передачі інформації, що містить центральний процесор та модуль безпровідного і/або провідного приймання/передачі даних на комп'ютеризований пристрій, який відрізняється тим, що контактні датчики виконані з тонкого еластичного струмопровідного матеріалу, а в корпус кожної рукавички додатково вмонтовано датчики згинання пальців та долонь, які розташовані в природних місцях згинання суглобів, щонайменше один датчик-гіроскоп, щонайменше один датчик магнітного поля, які зв'язані з процесором у блоці обробки та приймання/передачі інформації.
2. Пристрій за п. 1, який відрізняється тим, що в корпус кожної рукавички додатково вмонтовано щонайменше один барометричний датчик, який зв'язаний з процесором у блоці обробки та приймання/передачі інформації.
3. Пристрій за п. 1, який відрізняється тим, що в корпус кожної рукавички додатково вмонтовано щонайменше один радіо/ультразвуковий далекомір, який зв'язаний з процесором у блоці обробки та приймання/передачі інформації.
4. Пристрій за пп. 1-3, який відрізняється тим, що на корпус кожної рукавички додатково вмонтовано засоби введення/виведення інформації для управління роботою пристрою.
Текст
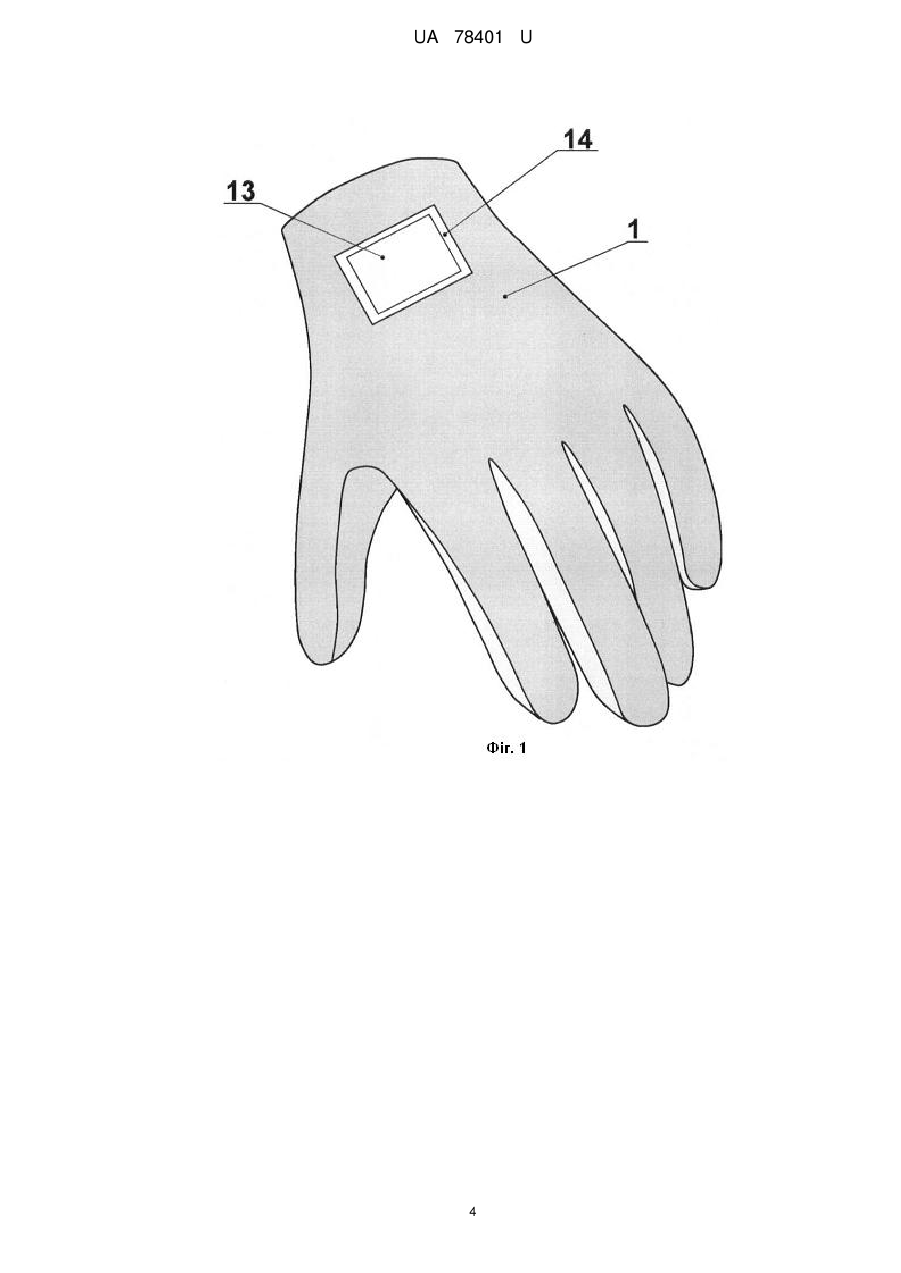
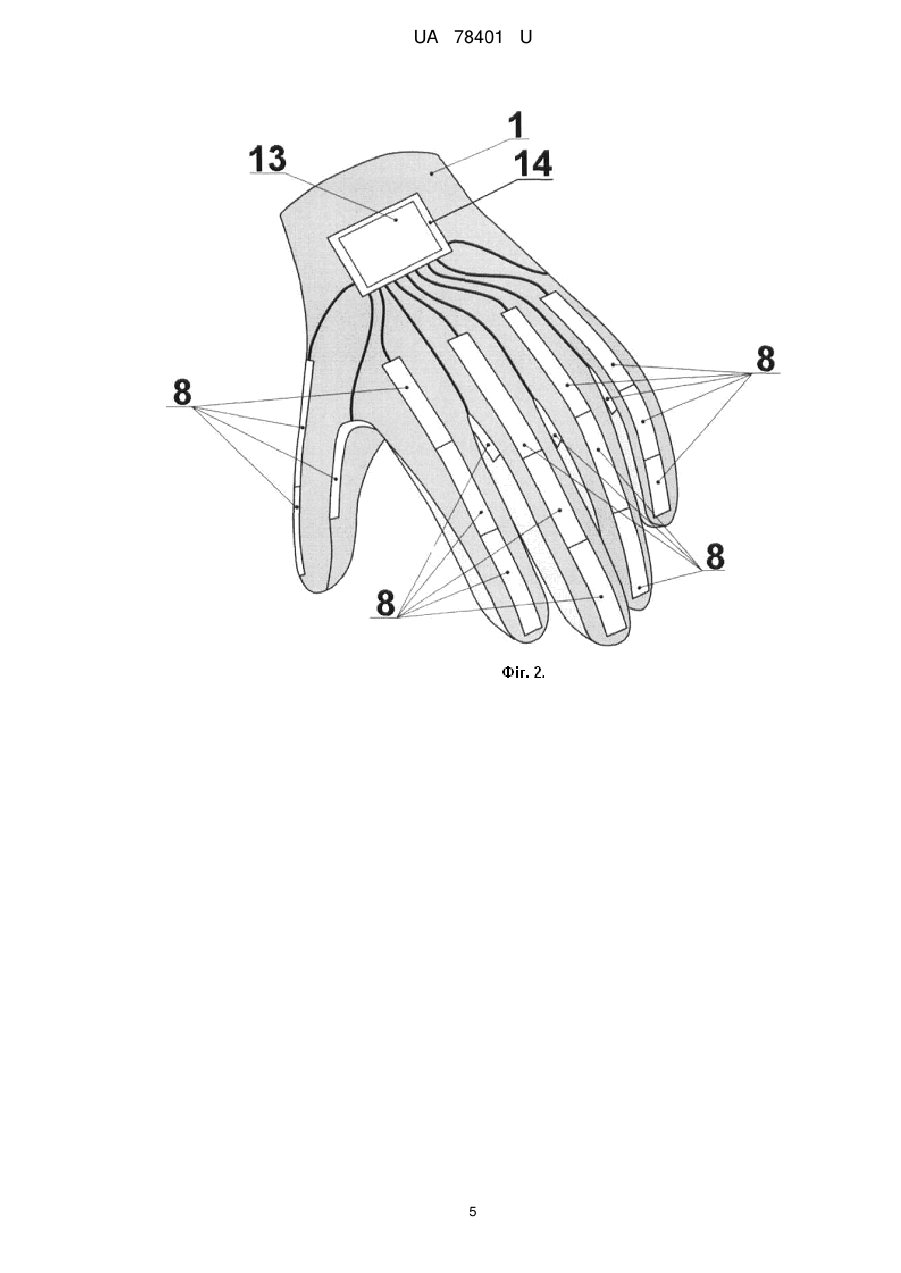
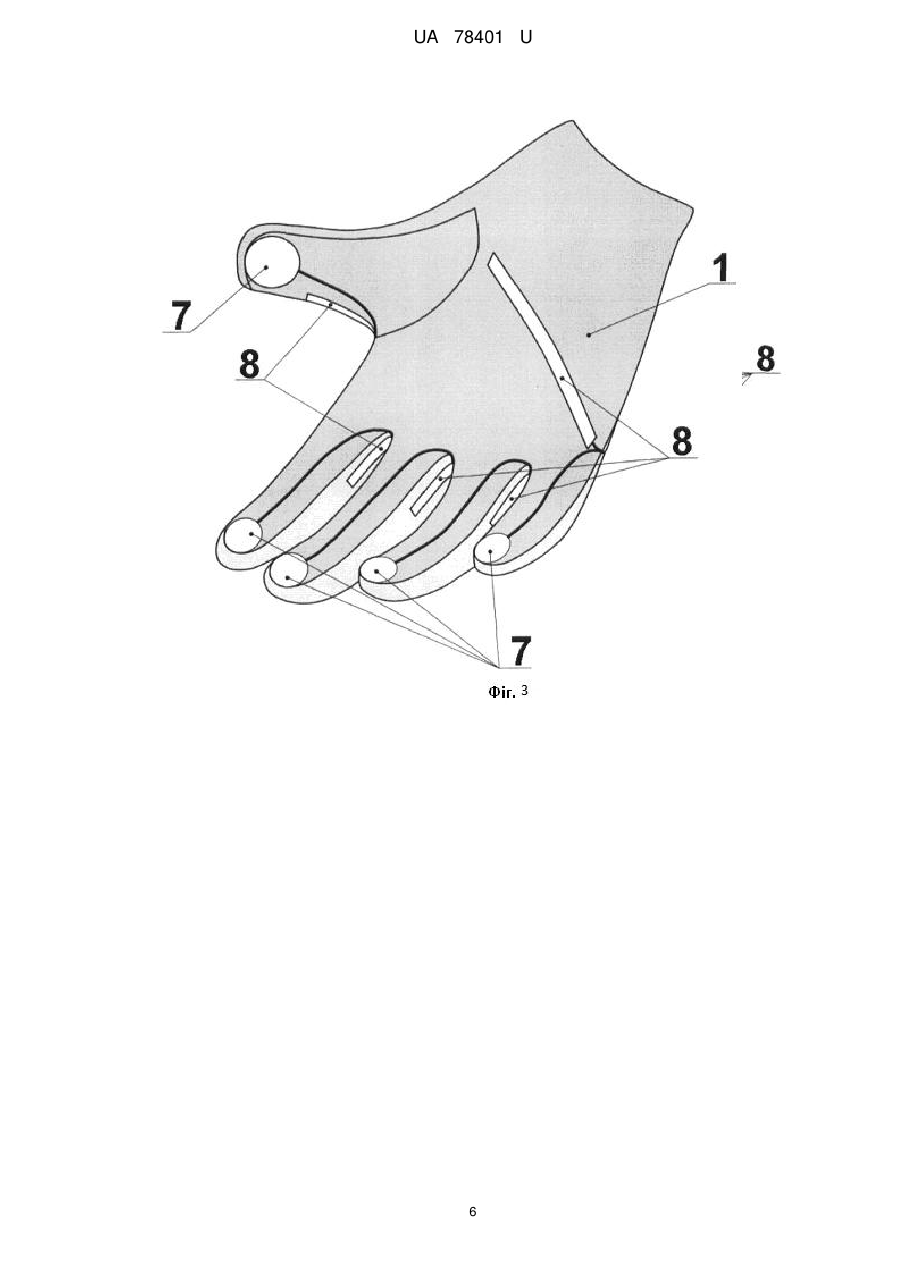
Реферат: UA 78401 U UA 78401 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до області безконтактної взаємодії користувача з комп'ютеризованими пристроями та може бути використана для захвату рухів та розпізнавання жестів з метою керування та взаємодії людини з електронними пристроями (комп'ютерами, смартфонами, планшетними ПК тощо). Відомий пристрій для введення інформації (Патент РФ № 92211, МПК G06F3/033, G09G5/08, опубл. 10.03.2010 p.), що містить корпус, виконаний з можливістю кріплення його на руці користувача у вигляді рукавички "без пальців", забезпечений елементами управління, розташованими на бічних сторонах середнього і вказівного пальців, які спрямовані у бік великого пальця, пристроєм для відстежування та безпровідним передавачем сигналів на комп'ютер. Пристрій забезпечений смугою прокрутки, розташованої на корпусі з внутрішньої сторони долоні руки, в вигляді елементів управління використовують обмежені контактні поверхні, розташовані на середній і основній фалангах середнього і вказівного пальців, а пристрій для відстежування включає щонайменше один інерційний датчик, що відстежує переміщення руки. Недоліком даного пристрою є невисока точність передачі сигналів на комп'ютер та неможливість відстежувати всі переміщення та рухи руки. Відомий пристрій введення та виведення інформації (Патент України №46906, МПК G06F 3/00, G09G 5/00, опубл. 11.01.2010, Бюл. № 1, 2010 p.), який вибраний за прототип, що містить корпус, виконаний у формі двох еластичних рукавичок з багатошарового тонкого еластичного матеріалу для надягання на руки, та електронний блок, що містить в єдиному корпусі блок обробки та передачі введеної інформації на комп'ютер, контролер дисплея, а також джерела електроживлення. На частини зовнішніх поверхонь рукавичок, що відповідають відносно рівним ділянкам поверхні кисті руки, нанесено шар гнучкого органічного світлодіодного матеріалу для відображення графічної інформації. У тіло рукавичок вмонтовані численні контактні датчики, що реагують на дотик, які виконані у вигляді сенсорних мембран тиску та розташовані під тими самими поверхнями, на які нанесено шар гнучкого органічного світлодіодного матеріалу, утворюючи в цілому сенсорний екран на поверхні рукавичок із ділянками для натискання або ковзання, що є імітованими клавішами або іншими елементами маніпуляторів, наприклад колеса миші. Пристрій має додаткові мікродатчики - акселерометри - або датчики відстані. Недоліком даного пристрою є неможливість відстежувати всі переміщення та рухи руки. Крім того, суміщення на ньому функцій введення та виведення інформації у різній формі створює складності у використанні. В основу корисної моделі поставлена задача вдосконалення пристрою керування за допомогою жестів, в якому за рахунок виконання контактних датчиків з тонкого еластичного струмопровідного матеріалу та вмонтування в корпус кожної рукавички датчиків згинання пальців та долонь, щонайменше одного датчика гіроскопа, щонайменше одного датчика магнітного поля забезпечується управління комп'ютеризованим пристроєм за допомогою жестів рук, на які надітий даний запропонований пристрій. Поставлена задача вирішується тим, що в запропонованому пристрої керування за допомогою жестів, що містить корпус, виконаний у формі однієї або двох рукавичок для надягання на руки, на поверхні яких є вбудовані контактні датчики, щонайменше один акселерометр, джерело живлення, блок обробки та приймання/передачі інформації, що містить центральний процесор та модуль безпровідного і/або провідного приймання/передачі даних на комп'ютеризований пристрій, в якому згідно з корисною моделлю контактні датчики виконані з тонкого еластичного струмопровідного матеріалу, а в корпус кожної рукавички додатково вмонтовано датчики згинання пальців та долонь, які розташовані в природних місцях згинання суглобів, щонайменше один датчик-гіроскоп, щонайменше один датчик магнітного поля, які зв'язані з процесором у блоці обробки та приймання/передачі інформації. Крім того, в корпус кожної рукавички додатково вмонтовано щонайменше один барометричний датчик, який зв'язаний з процесором у блоці обробки та приймання/передачі інформації. Крім того, в корпус кожної рукавички додатково вмонтовано щонайменше один радіо/ультразвуковий далекомір, який зв'язаний з процесором у блоці обробки та приймання/передачі інформації. Крім того, на корпус кожної рукавички додатково вмонтовано засоби введення/виведення інформації для управління роботою пристрою. Корисна модель пояснюється кресленнями, де на Фіг.1 зображено пристрій керування за допомогою жестів у формі рукавичок, на Фіг. 2 (вид зверху) та Фіг. 3 (вид знизу) - зовнішній вигляд пристрою без верхнього (захисного) шару, а на Фіг.4 - схему пристрою (для однієї рукавички). 1 UA 78401 U 5 10 15 20 25 30 35 40 45 50 55 Запропонований пристрій керування за допомогою жестів (див. Фіг. 1-4) містить корпус 1, виконаний у формі однієї або двох рукавичок для надягання на руки. В корпус 1 кожної рукавички вмонтовано джерело живлення 3 з акумулятором 4, блок обробки та приймання/передачі даних 14, який містить центральний процесор 2 та модуль безпровідного і/або провідного приймання/передачі даних 5 на комп'ютеризований пристрій. В корпус 1 вмонтовано акселерометри 6, контактні датчики 7, датчики згинання пальців та долонь 8, які розташовані в природних місцях згинання суглобів, щонайменше один датчик-гіроскоп 9, щонайменше один датчик магнітного поля 10, щонайменше один барометричний датчик 11, щонайменше один радіо/ультразвуковий далекомір 12. Контактні датчики 7 виконані з тонкого еластичного струмопровідного матеріалу. На корпус 1 додатково вмонтовано засоби введення/виведення інформації 13 для управління запропонованим пристроєм. Дані засоби можуть бути виконані у вигляді дисплею з підтримкою сенсорного вводу. Процесор 2, який є у блоці 14, що вмонтовано в корпус 1, зв'язаний з акселерометрами 6, контактними датчиками 7, датчиками згинання 8, датчиками-гіроскопами 9, датчиками магнітного поля 10, барометричними датчиками 11, радіо/ультразвуковими далекомірами 12, з модулем безпровідних або провідних прийому/передачі даних 5 і засобами введення/виведення інформації для управління роботою пристрою 13. Запропонований пристрій використовують наступним чином Користувач надіває пристрій на одну та/або дві руки та вмикає пристрій. Після подачі живлення від джерела живлення 3 пристрій стає доступним для додавання в мережах передачі даних, наприклад за допомогою Bluetooth®, для з'єднання з комп'ютеризованим пристроєм-приймачем (наприклад, з комп'ютером, з планшетним ПК, зі смартфоном, з телевізором та іншими). Як правило, дана операція відбувається шляхом додавання запропонованого пристрою в список підключених до комп'ютеризованого пристрою-приймача за допомогою можливостей операційної системи пристрою-приймача. При цьому підключений запропонований пристрій керування може сприйматися пристроєм-приймачем по-різному в залежності від настройки пристрою керування, наприклад як бездротовий маніпулятор - комп'ютерна миша, бездротовий джойстик або будьякий інший прилад з ряду стандартних для операційної системи, або ж таких що, вимагають установки власних драйверів. Далі пристрій керування може використовуватися як стандартний пристрій введення/виведення або ж як пристрій керування для певного програмного забезпечення, наприклад для розпізнавання жестів та перетворення їх у звук. Також, модуль безпровідної та/або провідних прийому/передачі даних 5 може бути забезпечений USB портом для з'єднання з комп'ютеризованим пристроєм. Сам процес роботи пристрою керування з пристроєм-приймачем полягає в обміні пакетами даних по безпровідному або провідному зв'язку. При роботі пристрою керування відбувається обробка даних датчиків 6, 7, 8, 9, 10, 11 та 12 за допомогою процесора 2 пристрою керування і відправлення їх в пристрій-приймач в необхідному нормалізованому вигляді, тобто або у вигляді протоколу роботи комп'ютерної миші, якщо пристрій керування використовується замість миші, або у вигляді координат вершин і ребер сіткової моделі, що повторює положення рук, або в іншому вигляді, необхідному для пристрою приймача. Обробка даних датчиків 6, 7, 8, 9, 10, 11 та 12 відбувається наступним чином. Процесор 2 пристрою керування надсилає запити та отримає дані (сигнали) від датчиків 6, 7, 8, 9, 10, 11 та 12 зв'язок з якими здійснюється реалізацією спільного для процесора 2 і конкретного типу датчика цифрового протоколу або ж обробкою аналогових сигналів з датчиків 6, 7, 8, 9, 10, 11 та 12, якщо датчики 6, 7, 8, 9, 10, 11 та 12 надають саме аналогові сигнали, і подальшим переведенням аналогових сигналів у цифрові за допомогою аналого-цифрових перетворювачів, вбудованих в процесор 2, або ж окремими пристроями, підключеними до процесора з використанням спільних цифрових протоколів. Також в зв'язці між датчиками і аналого-цифровим перетворювачем може бути встановлений операційний підсилювач (не показаний) при необхідності первісного посилення сигналу. Датчики, такі як, акселерометри 6, датчики-гіроскопи 9, датчики магнітного поля (компаси) 10, барометричні датчики 11, радіо/ультразвукові далекоміри 12, які розташовані усередині корпусу 1 пристрою керування, використовуються для визначення положення долонь в просторі. При цьому використовуються як абсолютні величини, тобто кути повороту кожної рукавички щодо магнітного поля і центра земного тяжіння, так і відносні, тобто різниця висот між рукавичками, виходячи з показань атмосферних тисків на кожній з рукавичок, відстані між рукавичками (у разі застосування двох рукавичок). Вимірювані величини отримують спільним аналізом показань вище перерахованих датчиків за допомогою алгоритмів, які виконуються процесором 2. 2 UA 78401 U 5 10 15 20 25 30 Відносно положення долонь відбувається визначення згинання пальців рук та долонь. Для цього використовуються контактні датчики 7 та датчики згинання 8, розташовані у корпусі пристрою керування 1. Контактні датчики 7 виконані у вигляді тонкого еластичного струмопровідного матеріалу, причому на частині датчиків присутній високий або низький логічний рівень, що при доторканні до протилежних датчиків, які з'єднані із процесором 2, провокує детектування процесором 2 зміни логічного рівня на них, що свою чергу свідчить про певне торкання пальців до долоні або до інших пальців. Датчики згинання 8 встановлено в корпусі пристрою керування 1 в природних місцях згинання суглобів, що дає змогу визначити кути згинання суглобів пальців та долонь. Датчики згинання 8 реагують на змінення кута свого згинання шляхом змінення свого електричного опору, що дає змогу визначити значення кута згинання датчиків 8 процесором 2, із використанням аналого-цифрових перетворювачів, які вбудовані у процесор 2 та/або являють собою окремий елемент (не показані). Як правило, між аналого-цифровим перетворювачем та датчиками згинання 8 встановлюють операційний посилювач, для посилення сигналу (не показаний). Прийняті, оброблені і нормалізовані показники датчиків процесором 2 даного пристрою надходять в модуль прийому/передачі даних 5, а звідки надсилаються на пристрій-приймач. Пристрій-приймач обробляє дані, що надійшли, і реалізує необхідні дії в залежності від настройки пристрою керування і виконуваного на пристрої-приймачі програмного забезпечення: переміщує курсор миші, виконує навігацію всередині операційної системи, розпізнає символи на основі жестів для набору тексту, переміщує і повертає віртуальні об'єкти (тривимірні моделі) в просторі або виробляє будь-які інші дії, передбачені програмним забезпеченням пристрою приймача, наприклад розпізнає жести та перетворює їх у звук. Також пристрій керування може бути оснащено засобами введення/виведення інформації 13 для управління режимами пристрою, отримання інформації про стан заряду або іншої інформації. Як засіб введення/виведення може бути використаний дисплей з підтримкою сенсорного введення. Корисна модель, що заявляється, може бути виготовлена відомими в електронній промисловості способами з використанням відомих засобів та може бути застосована для захвату та розпізнавання жестів з метою керування та взаємодії людини з електронними пристроями (комп'ютерами, смартфонами, планшетними ПК тощо). ФОРМУЛА КОРИСНОЇ МОДЕЛІ 35 40 45 50 1. Пристрій керування за допомогою жестів, що містить корпус, виконаний у формі однієї або двох рукавичок для надягання на руки, на поверхні яких є вбудовані контактні датчики, щонайменше один акселерометр, джерело живлення, блок обробки та приймання/передачі інформації, що містить центральний процесор та модуль безпровідного і/або провідного приймання/передачі даних на комп'ютеризований пристрій, який відрізняється тим, що контактні датчики виконані з тонкого еластичного струмопровідного матеріалу, а в корпус кожної рукавички додатково вмонтовано датчики згинання пальців та долонь, які розташовані в природних місцях згинання суглобів, щонайменше один датчик-гіроскоп, щонайменше один датчик магнітного поля, які зв'язані з процесором у блоці обробки та приймання/передачі інформації. 2. Пристрій за п. 1, який відрізняється тим, що в корпус кожної рукавички додатково вмонтовано щонайменше один барометричний датчик, який зв'язаний з процесором у блоці обробки та приймання/передачі інформації. 3. Пристрій за п. 1, який відрізняється тим, що в корпус кожної рукавички додатково вмонтовано щонайменше один радіо/ультразвуковий далекомір, який зв'язаний з процесором у блоці обробки та приймання/передачі інформації. 4. Пристрій за пп. 1-3, який відрізняється тим, що на корпус кожної рукавички додатково вмонтовано засоби введення/виведення інформації для управління роботою пристрою. 3 UA 78401 U 4 UA 78401 U 5 UA 78401 U 6 UA 78401 U Комп’ютерна верстка Л.Литвиненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
Назва патенту англійськоюManipulation device based on gesture recognition
Автори англійськоюStepanov Anton Valeriiovych
Назва патенту російськоюУстройство управления с помощью жестов
Автори російськоюСтепанов Антон Валерьевич
МПК / Мітки
МПК: G06F 3/00
Мітки: жестів, допомогою, керування, пристрій
Код посилання
<a href="https://ua.patents.su/9-78401-pristrijj-keruvannya-za-dopomogoyu-zhestiv.html" target="_blank" rel="follow" title="База патентів України">Пристрій керування за допомогою жестів</a>
Пристрій керування за допомогою жестів
Номер патенту: 78398
Опубліковано: 11.03.2013
Автор: Степанов Антон Валерійович
Мітки: жестів, допомогою, керування, пристрій
Формула / Реферат:
1. Пристрій керування за допомогою жестів, що містить корпус, в який вмонтовано датчики, блок обробки та передачі інформації на комп'ютеризований пристрій, джерело живлення, щонайменше один акселерометр, причому пристрій виконаний з можливістю підключення до комп'ютеризованого пристрою з використанням бездротових засобів, який відрізняється тим, що пристрій виконано у вигляді браслетів для одягання на зап'ястки рук, у корпус із виведенням...
Спосіб і пристрій керування орієнтованою ракетою за допомогою приводу, що стежить за орієнтацією траєкторії
Номер патенту: 82858
Опубліковано: 26.05.2008
Автор: Мартіне Дідьє
МПК: G05D 1/08
Мітки: керування, допомогою, траєкторії, орієнтованою, спосіб, стежить, орієнтацією, ракетою, пристрій, приводу
Формула / Реферат:
1. Спосіб керування орієнтованою ракетою за допомогою приводу, що стежить за орієнтацією траєкторії, чутливої до впливу зовнішніх збурень, який полягає в тому, що щонайменше для тангажа (для горизонтальної осі) попередньо визначають правило керування, що містить поправковий член першого порядку, перехідний член, що містить характеристичні параметри ракети і зовнішніх збурень (А6, К1), коефіцієнт (Кр) посилення орієнтації і коефіцієнт (Кv)...
Пристрій з автоматизованою системою керування для індивідуальної системи опалення за допомогою перетворення електричної енергії в теплову енергію теплоносія зі зменшенням електричної потужності нагрівача теплон
Номер патенту: 39255
Опубліковано: 25.02.2009
Автор: Панченко Ігор Володимирович
МПК: F24D 10/00, F24H 7/00, F24D 15/00
Мітки: опалення, керування, системою, теплову, електричної, індивідуальної, системі, автоматизованою, теплон, енергію, теплоносія, нагрівача, пристрій, допомогою, зменшенням, енергії, перетворення, потужності
Формула / Реферат:
Пристрій з автоматизованою системою керування для індивідуального опалення приміщень за допомогою перетворення електричної енергії в теплову енергію теплоносія зі зменшенням електричної потужності нагрівача теплоносія, який відрізняється тим, що для реалізації можливості примусової, рівномірної циркуляції теплоносія; контролю та підтримки тиску теплоносія; реалізації функції використання накопиченої енергії теплоносія для відновлення...
Пристрій системи керування та моніторингу споживачів електричної енергії
Номер патенту: 72128
Опубліковано: 10.08.2012
Автори: Полєтаєв Дмитро Олександрович, Соколенко Богдан Валентинович, Дячук Владислав Сергійович, Таратухін Олександр Олександрович
МПК: G01R 19/25, G01R 11/00, H02J 3/00
Мітки: електричної, моніторингу, споживачів, системі, керування, пристрій, енергії
Формула / Реферат:
Пристрій системи керування та моніторингу споживачів електричної енергії, що містить блок керування, який відрізняється тим, що додатково містить пристрій комутації споживачів електричної енергії, датчики струму та фази, датчик напруги, додаткові датчики, модуль прийому/передачі даних, енергонезалежну пам'ять, причому блок керування підключений до пристрою комутації споживачів електричної енергії, модуля прийому/передачі даних та...
Пристрій для автоматичного керування електроспоживанням

Номер патенту: 62126
Опубліковано: 10.08.2011
Автори: Плєшков Петро Григорович, Савеленко Іван Володимирович, Сіріков Олександр Іванович
МПК: H02J 13/00
Мітки: керування, автоматичного, пристрій, електроспоживанням
Формула / Реферат:
Пристрій для автоматичного керування електроспоживанням, який має первинні датчики витрати електроенергії, що підключені до блока прийому інформації, який відрізняється тим, що блок прийому інформації від первинних датчиків підключений до мікроконтролера, додатково введені блоки прийому інформації від лічильників технічного і комерційного обліку, виходи з яких підключені до мікроконтролера, а вихід з мікроконтролера підключений до блока...
Попередній патент: Спосіб одержання протипухлинного препарату “неореверсин”
Наступний патент: Пристрій озвучування жестів
Випадковий патент: Установка для ультразвукового крекінгу вуглеводневих сполук (вуглеводневої сировини)