Пристрій для автоматичного встановлення та демонтажу інструментів на роботі
Формула / Реферат
1. Пристрій для автоматичного встановлення та демонтажу інструментів на роботі, який містить засоби для зберігання ряду однакових інструментів і засоби для центрування інструмента в положенні для автоматичного встановлення на роботі, при цьому кожний інструмент містить осьовий отвір для встановлення на обертовому штирі, передбаченому на роботі, засоби для зберігання містять поверхню, яка служить опорою для штабеля інструментів, і засоби для центрування штабеля інструментів, що включають рухомий в осьовому напрямку циліндричний стрижень, що входить в осьові отвори інструментів штабеля, при цьому опорна поверхня містить отвір, через який проходить вказаний штир, розташований на осі штабеля інструментів і з'єднаний прорізом з краєм опорної поверхні так, що штир може входити в отвір опорної поверхні і в осьовий отвір найнижчого інструмента штабеля за допомогою виштовхування циліндричного центруючого стрижня і потім переміщатися в поперечному напрямку у вказаному прорізі для видалення цього інструмента із засобів зберігання.
2. Пристрій за п. 1, в якому центруючий стрижень прямує під час свого осьового переміщення у напрямку до опорної поверхні для інструментів, при цьому його переміщення до опорної поверхні обмежене обмежуючими засобами.
3. Пристрій за п. 2, в якому обмежуючі засоби містять розпірку або клин, розміщений між консоллю, яка несе центруючий стрижень, і опорною поверхнею для інструментів.
4. Пристрій за п. 1, в якому опорна поверхня для інструментів встановлена так, щоб ковзати у напрямку штабелювання інструментів і взаємодіяти з засобами, що обмежують її переміщення у напрямку від штабеля інструментів.
5. Пристрій за п. 4, в якому засоби зберігання містять другу опорну поверхню, паралельну першій опорній поверхні і розташовану під нею, обмежуючу разом з нею нішу для зберігання частково зношеного інструмента, друга опорна поверхня містить осьовий отвір, через який проходить штир, з'єднаний за допомогою прорізу з краєм цієї другої опорної поверхні, причому осьові отвори і прорізи двох опорних поверхонь в основному ідентичні і встановлені співвісно.
6. Пристрій за п. 5, який містить датчик для виявлення переміщення першої поверхні по відношенню до другої поверхні, що служить опорою для інструментів.
7. Пристрій за п. 1, в якому інструментами є щітки або шліфувальні круги.
8. Пристрій за п. 1, в якому нижній кінець центруючого стрижня містить засоби для центрування на кінці штиря.
9. Пристрій за п. 1, в якому центруючий стрижень містить радіальний палець, призначений для введення між двома найнижчими інструментами штабеля і переміщуваний такими засобами, як пневматичний штовхач.
10. Пристрій за п. 1, в якому центруючий стрижень встановлений так, щоб обертатися на горизонтальній консолі навколо горизонтальної осі, перпендикулярної стрижню і консолі.
11. Спосіб автоматичного встановлення та демонтажу інструментів на роботі за допомогою пристрою за будь-яким з попередніх пунктів, який містить стадії:
а) підведення штиря робота в заздалегідь встановлене положення на осі штабеля інструментів;
б) переміщення штиря вздовж осі для введення його в осьовий отвір штабеля шляхом виштовхування центруючого стрижня; і
в) переміщення штиря у напрямку від штабеля інструментів для виведення із засобів зберігання.
12. Спосіб за п. 11, який для того, щоб відкласти частково зношений інструмент, встановлений на штирі, містить стадії:
г) підведення цього інструмента під першу опорну поверхню; і
д) штовхання першої опорної поверхні для інструментів, використовуючи інструмент, встановлений на штирі, для її переміщення від другої опорної поверхні для інструментів;
е) переміщення штиря у напрямку, паралельному опорним поверхням, для розміщення інструмента між цими опорними поверхнями; і
ж) переміщення штиря в осьовому напрямку від штабеля інструментів для того, щоб видалити частково зношений інструмент і залишити цей інструмент між двома опорними поверхнями.
13. Спосіб за п. 12, який для вилучення частково зношеного інструмента містить стадії:
з) підведення штиря робота в визначене положення під двома поверхнями, що служать опорою для інструментів;
і) переміщення штиря по осі для введення його в частково зношений інструмент; і
к) переміщення штиря у напрямку, паралельному опорним поверхням, для віддалення інструмента від вказаних опорних поверхонь.
14. Спосіб за п. 11, який для перевірки наявності інструмента на штирі містить стадію переміщення першої поверхні, що служить опорою для інструментів, з використанням інструмента, встановленого на штирі робота, і виявлення цього переміщення за допомогою датчика.
15. Спосіб за п. 11, який містить попереднє визначення шести положень штиря по відношенню до засобів зберігання, що включають три верхніх положення на одному рівні і три нижніх положення на одному рівні, розподілених по прямокутній траєкторії і розташованих у вертикальному напрямку співвісно по парах, і переміщення штиря шляхом проходження через ці положення для того, щоб встановити інструмент на штирі, перевірити наявність інструмента на штирі і відкласти і вилучити частково зношений інструмент між поверхнями, які служать опорою для інструментів.
Текст
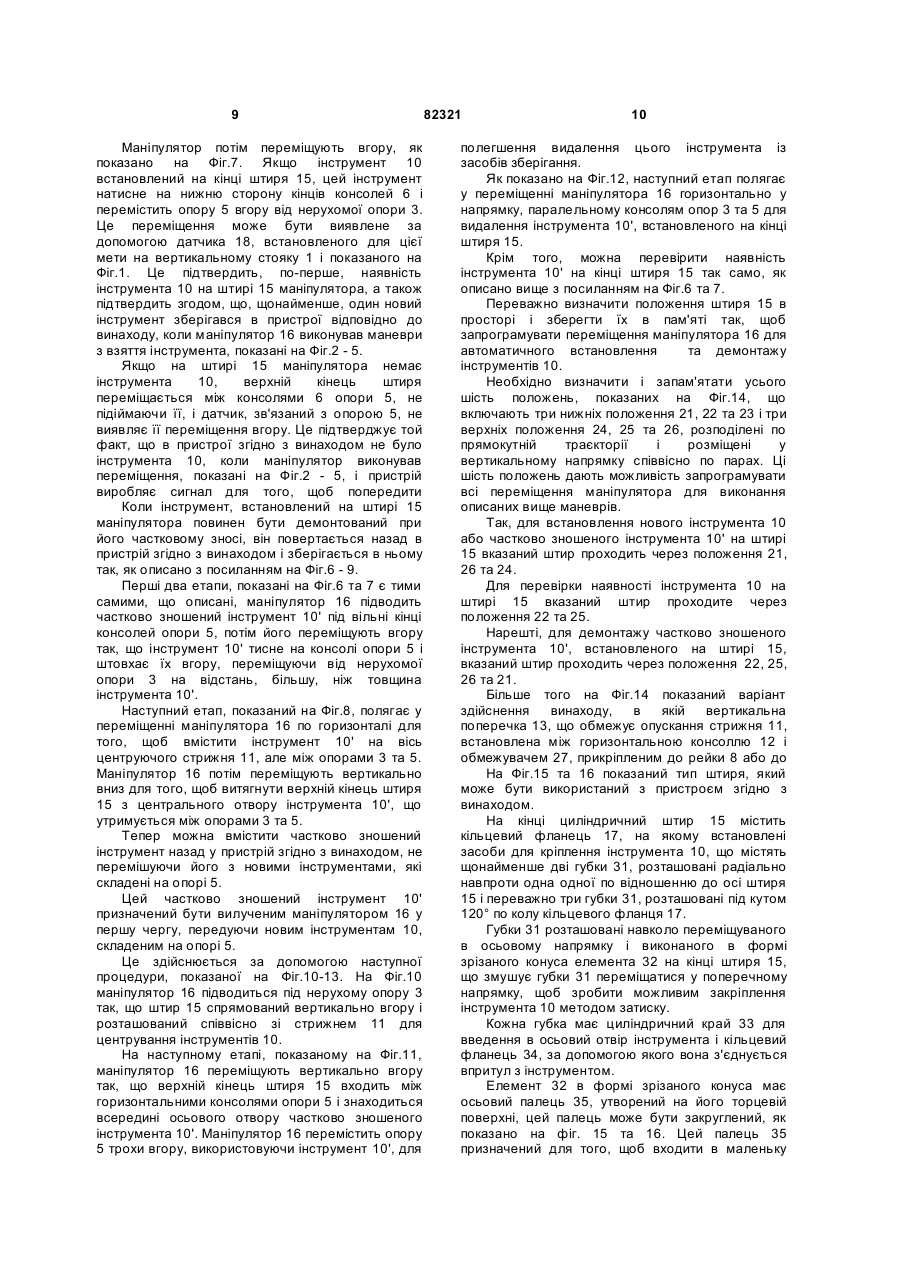
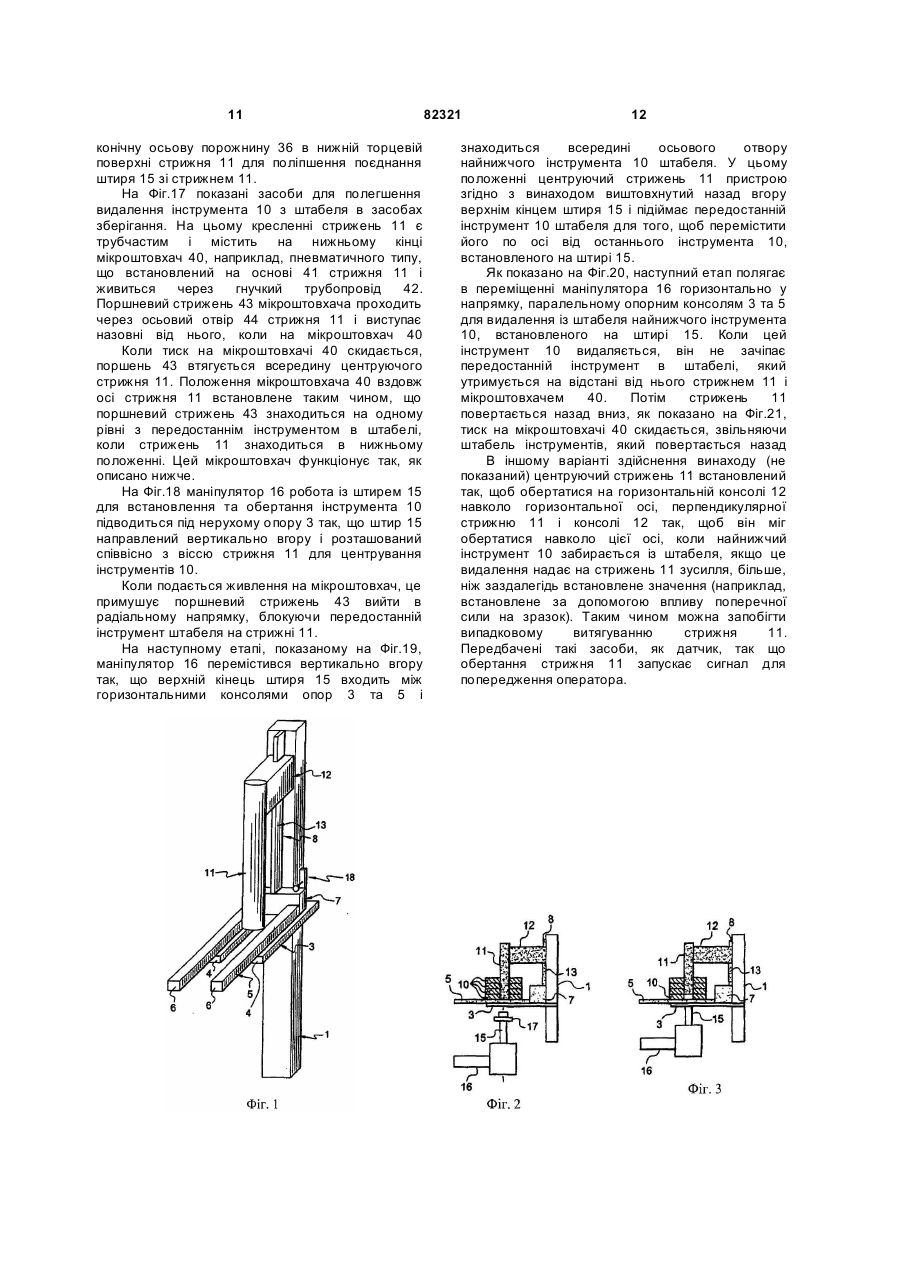
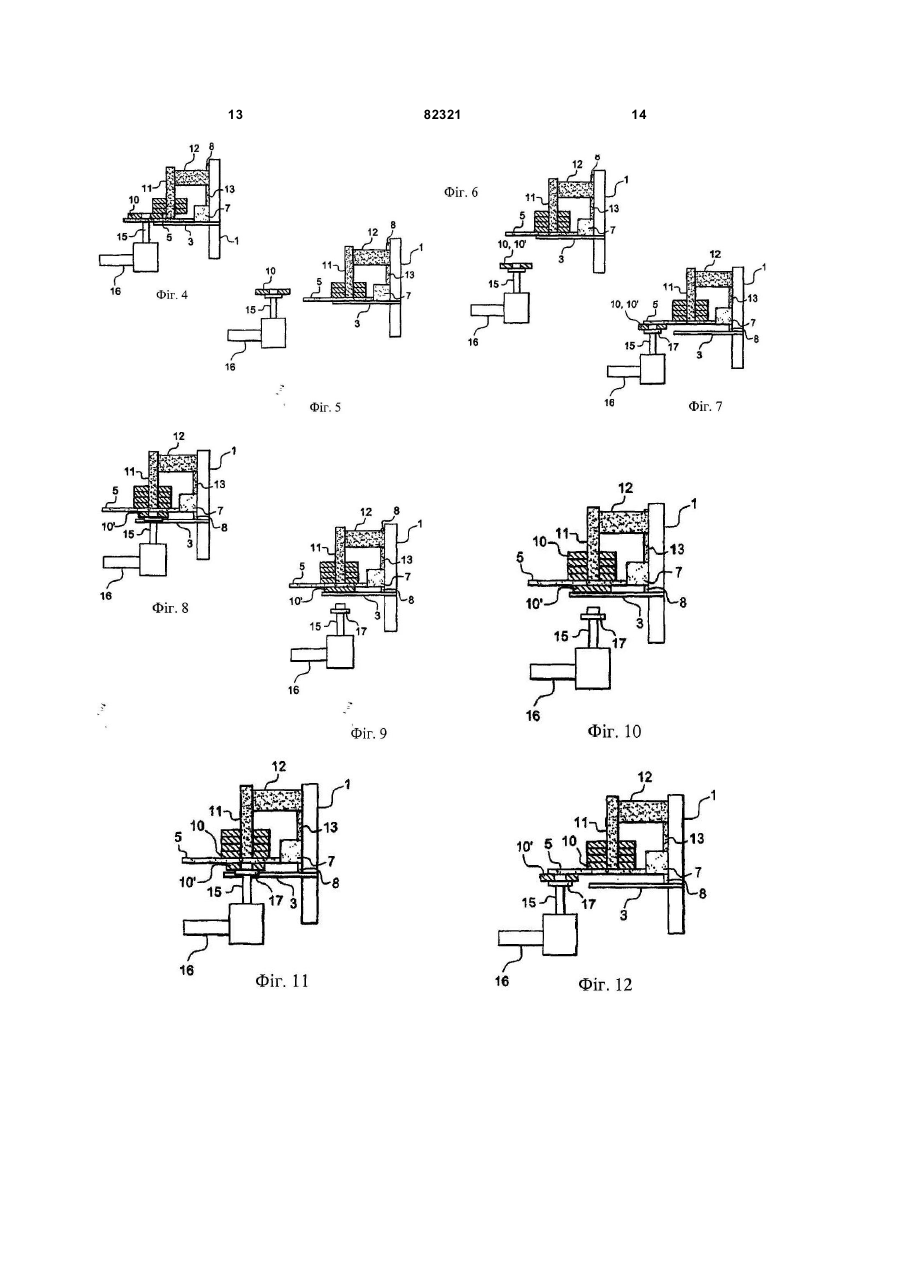
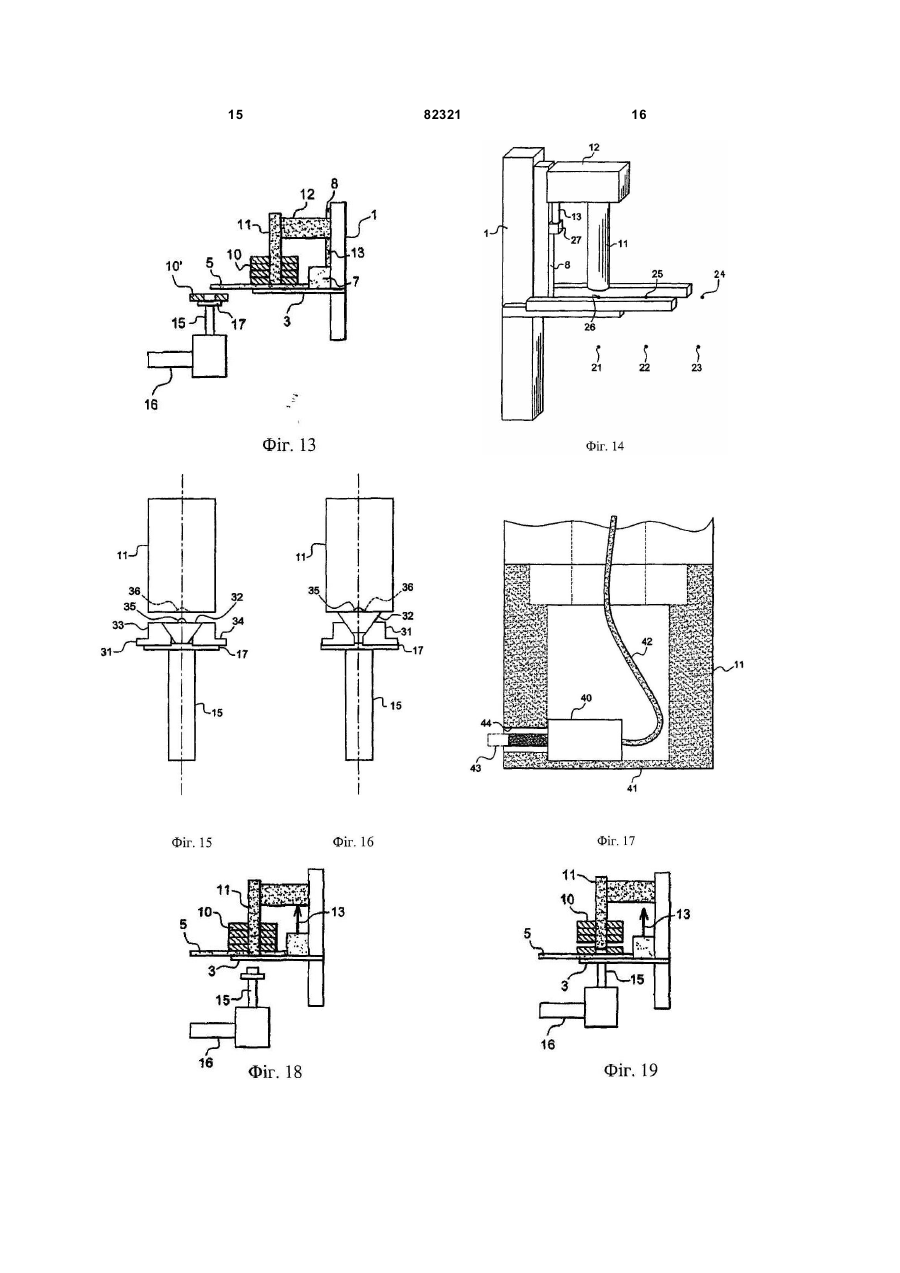
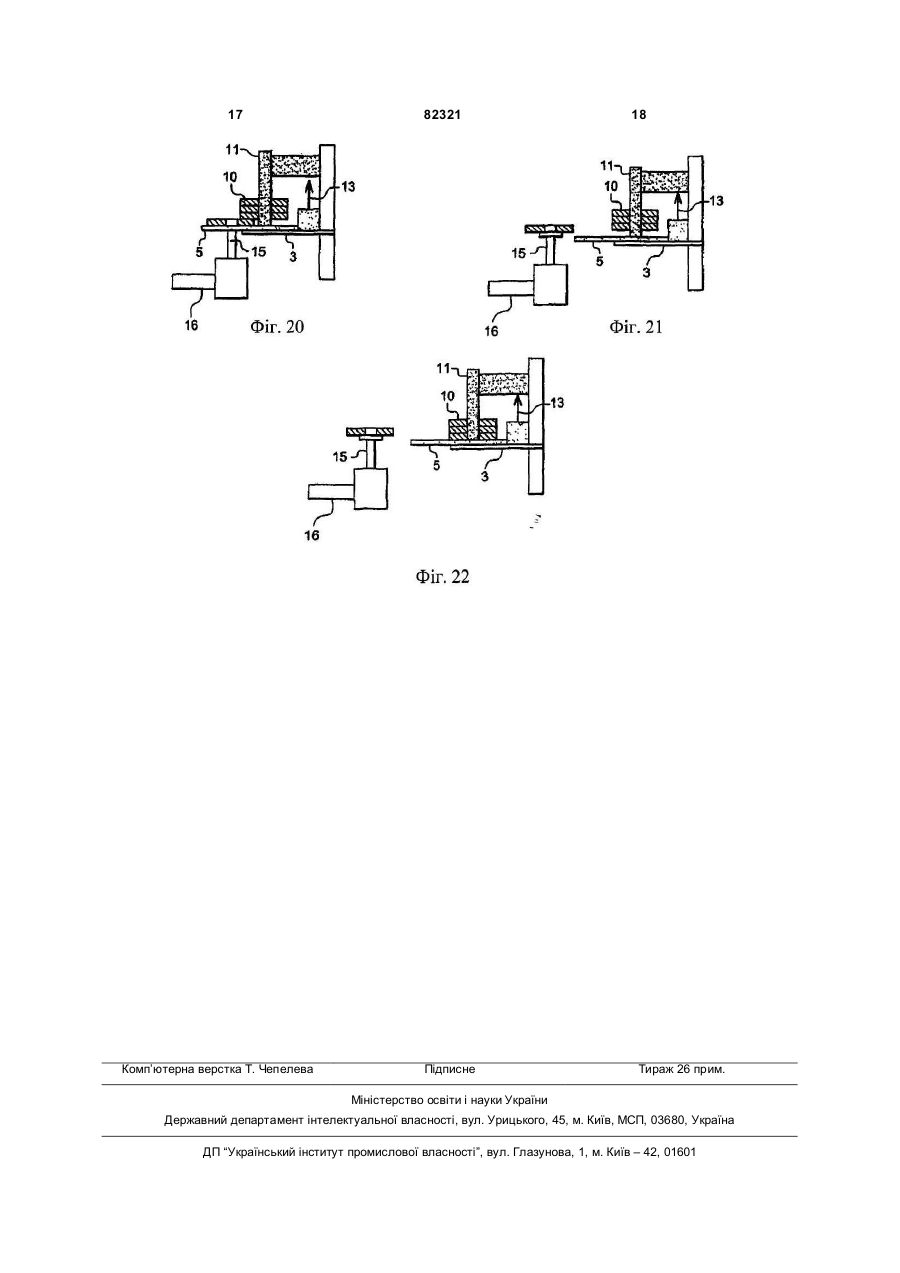
1. Пристрій для автоматичного встановлення та демонтажу інструментів на роботі, який містить засоби для зберігання ряду однакових інструментів і засоби для центрування інструмента в положенні для автоматичного встановлення на роботі, при цьому кожний інструмент містить осьовий отвір для встановлення на обертовому штирі, передбаченому на роботі, засоби для зберігання містять поверхню, яка служить опорою для штабеля інструментів, і засоби для центрування штабеля інструментів, що включають рухомий в осьовому напрямку циліндричний стрижень, що входить в осьові отвори інструментів штабеля, при цьому опорна поверхня містить отвір, через який проходить вказаний штир, розташований на осі штабеля інструментів і з'єднаний прорізом з краєм опорної поверхні так, що штир може входити в отвір опорної поверхні і в осьовий отвір найнижчого інструмента штабеля за допомогою виштовхування циліндричного центруючого стрижня і потім переміщатися в поперечному напрямку у вказаному прорізі для видалення цього інструмента із засобів зберігання. 2. Пристрій за п. 1, в якому центруючий стрижень прямує під час свого осьового переміщення у напрямку до опорної поверхні для інструментів, при цьому його переміщення до опорної поверхні обмежене обмежуючими засобами. 2 (19) 1 3 82321 4 б) переміщення штиря вздовж осі для введення його в осьовий отвір штабеля шляхом виштовхування центруючого стрижня; і в) переміщення штиря у напрямку від штабеля інструментів для виведення із засобів зберігання. 12. Спосіб за п. 11, який для того, щоб відкласти частково зношений інструмент, встановлений на штирі, містить стадії: г) підведення цього інструмента під першу опорну поверхню; і д) штовхання першої опорної поверхні для інструментів, використовуючи інструмент, встановлений на штирі, для її переміщення від другої опорної поверхні для інструментів; е) переміщення штиря у напрямку, паралельному опорним поверхням, для розміщення інструмента між цими опорними поверхнями; і ж) переміщення штиря в осьовому напрямку від штабеля інструментів для того, щоб видалити частково зношений інструмент і залишити цей інструмент між двома опорними поверхнями. 13. Спосіб за п. 12, який для вилучення частково зношеного інструмента містить стадії: з) підведення штиря робота в визначене положення під двома поверхнями, що служать опорою для інструментів; і) переміщення штиря по осі для введення його в частково зношений інструмент; і к) переміщення штиря у напрямку, паралельному опорним поверхням, для віддалення інструмента від вказаних опорних поверхонь. 14. Спосіб за п. 11, який для перевірки наявності інструмента на штирі містить стадію переміщення першої поверхні, що служить опорою для інструментів, з використанням інструмента, встановленого на штирі робота, і виявлення цього переміщення за допомогою датчика. 15. Спосіб за п. 11, який містить попереднє визначення шести положень штиря по відношенню до засобів зберігання, що включають три верхніх положення на одному рівні і три нижніх положення на одному рівні, розподілених по прямокутній траєкторії і розташованих у вертикальному напрямку співвісно по парах, і переміщення штиря шляхом проходження через ці положення для того, щоб встановити інструмент на штирі, перевірити наявність інструмента на штирі і відкласти і вилучити частково зношений інструмент між поверхнями, які служать опорою для інструментів. Даний винахід відноситься до пристроїв для автоматичного встановлення та демонтажу інструментів на роботі з маніпулятором. Інструменти, встановлені на маніпуляторі, повинні регулярно замінюватися для зміни виду інструмента, що використовується, його характеристик або просто заміни зношеного інструмента на новий. Інструменти, яких стосується винахід, забезпечені осьовим отвором для встановлення на штирі для обертання інструмента, зокрема, це щітки та шліфувальні круги. В існуючому рівні техніки різні види інструментів встановлюють на напрямних, що закінчуються на нижньому кінці V-подібною частиною для центрування інструмента у положенні для автоматичного встановлення на маніпуляторі. На нижньому кінці напрямних розташовані датчики для визначення положення отвору для встановлення інструмента. Для кожного виду інструмента передбачений також засіб зберігання і вилучення частково зношених інструментів, забезпечений датчиками, які надають інформацію про наявність частково зношеного інструмента та його положення. Цей відомий спосіб має ряд недоліків: напрямні, нахилені під кутом 45°, є відносно довгими для того, щоб підтримувати десять або більшу кількість інструментів, і разом з відповідними засобами зберігання вони займають відносно великий обсяг простору навколо робота; п'ять або шість датчиків використовується для кожного виду інструмента, що складає загалом від п'ятдесяти до шістдесяти датчиків для десяти видів. Оскільки кожний датчик зв'язаний з пристроєм введення робота, робот повинен мати додаткову панель введення-виведення, яка є досить дорогою (звичайно дві тисячі євро) коли інструментами є щітки, вони можуть Деформуватися більшою або меншою мірою через свою гнучкість, і їх розміщення на V-подібній частині на кінці напрямних не завжди є достатнім для їх точного розташування, що дозволяє автоматичне встановлення на маніпуляторі. У цьому випадку автоматичне встановлення зривається і оператор змушений втрутитися. Шляхом вивчення часу роботи робота було виявлено також, що час очікування заміни інструмента дорівнює або більше ніж час використання, що складає близько шести хвилин для абразивної щітки, оператор, який повинен запустити у робота програму обробки, повертається і здійснює ручні дії на своєму робочому місці. Однією з цілей даного винаходу є подолання цих недоліків. Для цієї мети винаходом пропонується пристрій для автоматичного встановлення та демонтажу інструментів на роботі, що містить засоби для зберігання ряду однакових інструментів і засобу для центрування інструмента в положенні для автоматичного встановлення на роботі, кожний інструмент містить осьовий отвір для встановлення на обертовому штирі, передбаченому на роботі, засоби зберігання містять поверхню, яка служить опорою для штабеля інструментів, і засобу для центрування штабеля інструментів, що складаються з переміщуваного в осьовому напрямку 5 циліндричного стрижня, що входить в осьові отвори інструментів штабеля, вказана опорна поверхня містить отвір, через який проходить вказаний штир, розташований на осі штабеля інструментів і з'єднаний прорізом з краєм вказаної опорної поверхні так, що вказаний штир може входити в отвір опорної поверхні і в осьовий отвір найнижчого інструмента штабеля шляхом виштовхування циліндричного центруючого стрижня і потім може бути переміщений в поперечному напрямку у вказаному прорізу для видалення цього інструмента із засобів зберігання. В пристрої відповідно до винаходу складені в штабель інструменти точно центровані на опорній поверхні з використанням стрижня, що входить в їх осьові отвори, незалежно ні від яких деформацій цих інструментів через їх гнучкість (у випадку щіток). Таке точне центрування виключає ризик зриву автоматичного встановлення на роботі. Більше того зберігання інструментів у вертикальних штабелях означає, що пристрій займає значно менше місця навколо робота. Відповідно до ознаки винаходу, опорна поверхня для інструментів встановлена так, щоб ковзати у напрямку штабелювання інструментів і зв'язана з датчиком для виявлення її руху і з другою опорною поверхнею для інструментів, яка розташована під першою поверхнею і яка має в основному таку саму конструкцію. Рухливість першої опорної поверхні робить можливим, поперше, перевірку наявності інструмента на штирі, по-друге, перевірку наявності інструментів в засобах зберігання і, нарешті, створення ніші для розміщення частково зношених інструментів між першою і другою опорними поверхнями, датчик також забезпечує можливість перевірки наявності частково зношеного інструмента в цій ніші. В пристрої відповідно до винаходу достатньо одного датчика для виявлення переміщень першої опорної поверхні для того, щоб інформувати робота про те, правильно чи ні встановлений інструмент на обертовому штирі, є чи ні нові інструменти в засобах зберігання і є чи ні частково зношені інструменти між двома опорними поверхнями. Коли десять або близько того пристроїв відповідно до винаходу розташовані навколо робота, десять відповідних датчиків можуть бути зв'язані з роботом без необхідності мати додатковий пристрій введення-виведення. Це призводить до значного зниження витрат. Також пропонується спосіб автоматичного встановлення та демонтажу інструментів на роботі, такому, як маніпулятор, за допомогою пристрою відповідно до винаходу, причому спосіб містить стадії: підведення штиря робота в заздалегідь встановлене положення під віссю штабеля інструментів; переміщення штиря вздовж осі для введення його в осьовий отвір найнижчого інструмента штабеля шляхом виштовхування центруючого стрижня; і переміщення штиря у напрямку від штабеля інструментів для виведення з засобів зберігання. 82321 6 Спосіб відповідно до винаходу також надає можливість демонтажу частково зношеного інструмента і вилучення частково зношеного інструмента і містить стадії: підведення цього інструмента під першу опорну поверхню; і штовхання першої опорної поверхні для інструментів, використовуючи інструмент, встановлений на штирі, для переміщення її від другої опорної поверхні для інструментів і переміщення штиря у напрямку, паралельному опорним поверхням, для розміщення інструмента між цими опорними поверхнями; і переміщення штиря по осі у напрямку від штабеля інструментів для того, щоб видалити зношений інструмент і залишити його між двома опорними поверхнями. Більше того тільки невелика кількість положень штиря в просторі, які заздалегідь встановлені і зберігаються в пам'яті, необхідна для програмування переміщень маніпулятора для того, щоб автоматично встановлювати та демонтувати нові інструменти і частково зношені інструменти. Інші переваги та ознаки винаходу стануть зрозумілі після прочитання нижченаведеного опису, наведеного як необмежуючий приклад, з посиланням на прикладені креслення, на яких: Фіг.1 являє собою схематичний вигляд пристрою відповідно до винаходу; Фіг.2 - 5 являють собою схематичний вигляд збоку, що відображає роботу пристрою відповідно до винаходу під час встановлення інструмента; Фіг.6 - 9 являють собою схематичний вигляд збоку, що відображає роботу пристрою відповідно до винаходу під час демонтажу частково зношеного інструмента; Фіг.10 - 13 являють собою схематичний вигляд збоку, що відображає роботу пристрою відповідно до винаходу під час встановлення частково зношеного обладнання; на Фіг.14 схематично показані положення, що визначають запрограмований шлях штиря робота в способі згідно з винаходом; Фіг.15 та 16 являють собою схематичний вигляд, що зображає штир робота і засобу для вирівнювання по відношенню до центруючих засобів пристрою згідно з винаходом; Фіг.17 являє собою збільшений схематичний вигляд в осьовому перерізі частини центруючих засобів пристрою згідно з винаходом; Фіг.18 - 22 являють собою схематичний вигляд збоку, що відображає роботу пристрою під час встановлення інструмента, пристрій має систему, показану на Фіг.17. Опис переважних варіантів здійснення винаходу На Фіг.1 схематично показаний варіант здійснення пристрою відповідно до винаходу. Цей пристрій в основному призначений для зберігання нових інструментів, таких, як щітки або шліфувальні круги і сконструйований так, щоб були можливі автоматичне встановлення та демонтаж цих інструментів на маніпуляторі із штирем для обертання інструмента. 7 Пристрій містить засоби зберігання, що включають вертикальний стояк 1, прикріплений до підлоги або до стіни відповідними засобами, на якому нерухомо встановлена горизонтальна опора 3 в формі вилки, що містить дві паралельні консолі 4, які простягаються в одному напрямку від вертикального стояка 1 і відділені одна від одної на відстань, меншу, ніж діаметр інструментів, призначених для зберігання в пристрої відповідно до винаходу, і більшою, ніж діаметр штиря маніпулятора, на якому ці інструменти повинні бути встановлені, як буде більш зрозуміло нижче. Інша опора 5, також в формі вилки, встановлена так, щоб ковзати вертикально по вертикальному стояку 1 над нерухомою опорою 3 і містить дві паралельні консолі 6, з'єднані разом на кінцях з боку вертикального стояка 1 поперечною поперечкою 7. Горизонтальні консолі 6 відділені одна від одної на відстань, яка в основному дорівнює відстані, що розділяє консолі 4 нерухомої опорної поверхні 3, і вони довші, ніж консолі 4, так що вони виступають за консолі 4 з дальньої від вертикального стояка 1 сторони. Поперечна поперечка 7 першої опорної поверхні 5 прямує по мірі її ковзання по вертикальній рейці 8, яка прикріплена, або утворена на відповідній поверхні вертикального стояка 1 і яка проходить, вгору від другої нерухомої опорної поверхні 3. Перша опорна поверхня 5 призначена служити опорою для штабеля інструментів 10, як показано на Фіг.2 і далі, ці інструменти ідентичні і складені вертикально один на одному, найнижчий інструмент в штабелі спирається на дві консолі 6 опори 5, яка сама спирається на дві консолі 4 другої нерухомої опорної поверхні 3 так, що осьові отвори цих інструментів, які роблять можливим їх встановлення на штирі маніпулятора, розташовані між двома консолями 4 другої нерухомої опорної поверхні 3 і між двома консолями 6 першої опорної поверхні 5. Пристрій відповідно до винаходу також містить засоби для центрування інструментів, складених на першій опорній поверхні 5, ці центруючі засоби містять вертикальний циліндричний стрижень 11, який проходить над першою опорною поверхнею 5 і верхній кінець якого несе горизонтальна консоль 12, що направляється при переміщенні по вертикальній рейці стояка 1. Вертикальна поперечка 1, що утворює розпірку або клин, проходить вниз від горизонтальної консолі 12 до поперечної поперечки 7 першої опорної поверхні 5 для обмеження переміщення вниз консолі 12 так, що нижній кінець циліндричного стрижня 11 в його найнижчому положенні знаходиться в основному на одному рівні з верхньою поверхнею консолей 6 першої опорної поверхні 5. Діаметр циліндричного стрижня 11 трохи менший діаметра осьового отвору інструментів 10, так що вони можуть складатися в штабель і при цьому точно центруватися по осі стрижня 11. Точність такого центрування складає, наприклад, близько одного або двох міліметрів. 82321 8 Пристрій відповідно до винаходу в наведеному прикладі дає можливість зберігати на першій опорній поверхні 5 штабель з чотирьох інструментів 10, хоча їх кількість може бути більшою і визначається довжиною центруючого стрижня 11 і відповідною протяжністю вертикального стояка 1 над другою нерухомою опорною поверхнею 3. Інструменти 10, складені на першій опорній поверхні 5 в цьому варіанті здійснення являють собою нові інструменти. На Фіг.2 - 5 схематично показано, як маніпулятор бере один з таких інструментів. На Фіг.2 маніпулятор 16, що має штир 15 для встановлення та обертання інструмента 10, підводиться під нерухому опору 3 так, що штир 15 орієнтований вертикально вгору і розташований співвісно з віссю стрижня 11 для центрування інструментів 10. Інструменти 10 утворюють штабель, точно центрований на першій опорній поверхні 5 своїми осьовими отворами, через які проходить стрижень 11, нижній кінець якого знаходиться на одному рівні з нижньою стороною найнижчого інструмента 10 штабеля. На наступному етапі, показаному на Фіг.3, маніпулятор 16 переміщений вертикально вгору так, що верхній кінець штиря 15 увійшов між горизонтальними консолями опор 3 та 5 і знаходиться всередині осьового отвору найнижчого інструмента 10 штабеля. У цьому положенні центруючий стрижень 11 пристрою відповідно до винаходу виштовхнуть вгору верхнім кінцем штиря 15 і нижній кінець стрижня 11 знаходиться на межі між найнижчим інструментом 10 штабеля і інструментом, розташованим в штабелі відразу над ним. фланець 17 на відстані Штир 15 має кільцевий від свого верхнього кінця, який дорівнює товщині інструмента 10. У положенні, показаному на Фіг.3, цей кільцевий фланець 17 тисне на нижню сторону інструмента 10 і кінець штиря 15 знаходиться на межі між двома найнижчими інструментами 10 штабеля. Як показано на Фіг.4, наступний етап полягає у переміщенні маніпулятора 16 горизонтально у напрямку, паралельному консолям опор 3 та 5 для видалення інструмента 10, розміщеного на кінці штиря 15, зі штабеля. Коли цей інструмент видалений, центруючий стрижень 11 звільняється від інструмента 10, розміщеного на штирі 15 і падає вниз на рівень першої опорної поверхні 5, потім, як показано на фіг.5, інструменти 10, що залишилися в штабелі, самі переміщаються вниз на першу опорну поверхню 5, залишаючись центрованими стрижнем 11. Існує можливість перевірити наявність інструмента 10 на кінці штиря 15 способом, описаним з посиланням на Фіг. 6 та 7. На Фіг. 6 маніпулятор 16 переміщений вниз і підведений до пристрою згідно з винаходом так, що інструмент 10, встановлений на штирі 15, знаходиться під вільними кінцями консолей 6 першої опорної поверхні 5, ці вільні кінці виступають 8 за вільні кінці консолей 4 другої нерухомої опорної поверхні 3, як вже вказано. 9 Маніпулятор потім переміщують вгору, як показано на Фіг.7. Якщо інструмент 10 встановлений на кінці штиря 15, цей інструмент натисне на нижню сторону кінців консолей 6 і перемістить опору 5 вгору від нерухомої опори 3. Це переміщення може бути виявлене за допомогою датчика 18, встановленого для цієї мети на вертикальному стояку 1 і показаного на Фіг.1. Це підтвердить, по-перше, наявність інструмента 10 на штирі 15 маніпулятора, а також підтвердить згодом, що, щонайменше, один новий інструмент зберігався в пристрої відповідно до винаходу, коли маніпулятор 16 виконував маневри з взяття інструмента, показані на Фіг.2 - 5. Якщо на штирі 15 маніпулятора немає інструмента 10, верхній кінець штиря переміщається між консолями 6 опори 5, не підіймаючи її, і датчик, зв'язаний з опорою 5, не виявляє її переміщення вгору. Це підтверджує той факт, що в пристрої згідно з винаходом не було інструмента 10, коли маніпулятор виконував переміщення, показані на Фіг.2 - 5, і пристрій виробляє сигнал для того, щоб попередити оператора. Коли інструмент, встановлений на штирі 15 маніпулятора повинен бути демонтований при його частковому зносі, він повертається назад в пристрій згідно з винаходом і зберігається в ньому так, як описано з посиланням на Фіг.6 - 9. Перші два етапи, показані на Фіг.6 та 7 є тими самими, що описані, маніпулятор 16 підводить частково зношений інструмент 10' під вільні кінці консолей опори 5, потім його переміщують вгору так, що інструмент 10' тисне на консолі опори 5 і штовхає їх вгору, переміщуючи від нерухомої опори 3 на відстань, більшу, ніж товщина інструмента 10'. Наступний етап, показаний на Фіг.8, полягає у переміщенні маніпулятора 16 по горизонталі для того, щоб вмістити інструмент 10' на вісь центруючого стрижня 11, але між опорами 3 та 5. Маніпулятор 16 потім переміщують вертикально вниз для того, щоб витягнути верхній кінець штиря 15 з центрального отвору інструмента 10', що утримується між опорами 3 та 5. Тепер можна вмістити частково зношений інструмент назад у пристрій згідно з винаходом, не перемішуючи його з новими інструментами, які складені на опорі 5. Цей частково зношений інструмент 10' призначений бути вилученим маніпулятором 16 у першу чергу, передуючи новим інструментам 10, складеним на опорі 5. Це здійснюється за допомогою наступної процедури, показаної на Фіг.10-13. На Фіг.10 маніпулятор 16 підводиться під нерухому опору 3 так, що штир 15 спрямований вертикально вгору і розташований співвісно зі стрижнем 11 для центрування інструментів 10. На наступному етапі, показаному на Фіг.11, маніпулятор 16 переміщують вертикально вгору так, що верхній кінець штиря 15 входить між горизонтальними консолями опори 5 і знаходиться всередині осьового отвору частково зношеного інструмента 10'. Маніпулятор 16 перемістить опору 5 трохи вгору, використовуючи інструмент 10', для 82321 10 полегшення видалення цього інструмента із засобів зберігання. Як показано на Фіг.12, наступний етап полягає у переміщенні маніпулятора 16 горизонтально у напрямку, паралельному консолям опор 3 та 5 для видалення інструмента 10', встановленого на кінці штиря 15. Крім того, можна перевірити наявність інструмента 10' на кінці штиря 15 так само, як описано вище з посиланням на Фіг.6 та 7. Переважно визначити положення штиря 15 в просторі і зберегти їх в пам'яті так, щоб запрограмувати переміщення маніпулятора 16 для автоматичного встановлення та демонтажу інструментів 10. Необхідно визначити і запам'ятати усього шість положень, показаних на Фіг.14, що включають три нижніх положення 21, 22 та 23 і три верхніх положення 24, 25 та 26, розподілені по прямокутній траєкторії і розміщені у вертикальному напрямку співвісно по парах. Ці шість положень дають можливість запрограмувати всі переміщення маніпулятора для виконання описаних вище маневрів. Так, для встановлення нового інструмента 10 або частково зношеного інструмента 10' на штирі 15 вказаний штир проходить через положення 21, 26 та 24. Для перевірки наявності інструмента 10 на штирі 15 вказаний штир проходите через положення 22 та 25. Нарешті, для демонтажу частково зношеного інструмента 10', встановленого на штирі 15, вказаний штир проходить через положення 22, 25, 26 та 21. Більше того на Фіг.14 показаний варіант здійснення винаходу, в якій вертикальна поперечка 13, що обмежує опускання стрижня 11, встановлена між горизонтальною консоллю 12 і обмежувачем 27, прикріпленим до рейки 8 або до стояка 1. На Фіг.15 та 16 показаний тип штиря, який може бути використаний з пристроєм згідно з винаходом. На кінці циліндричний штир 15 містить кільцевий фланець 17, на якому встановлені засоби для кріплення інструмента 10, що містять щонайменше дві губки 31, розташовані радіально навпроти одна одної по відношенню до осі штиря 15 і переважно три губки 31, розташовані під кутом 120° по колу кільцевого фланця 17. Губки 31 розташовані навколо переміщуваного в осьовому напрямку і виконаного в формі зрізаного конуса елемента 32 на кінці штиря 15, що змушує губки 31 переміщатися у поперечному напрямку, щоб зробити можливим закріплення інструмента 10 методом затиску. Кожна губка має циліндричний край 33 для введення в осьовий отвір інструмента і кільцевий фланець 34, за допомогою якого вона з'єднується впритул з інструментом. Елемент 32 в формі зрізаного конуса має осьовий палець 35, утворений на його торцевій поверхні, цей палець може бути закруглений, як показано на фіг. 15 та 16. Цей палець 35 призначений для того, щоб входити в маленьку 11 конічну осьову порожнину 36 в нижній торцевій поверхні стрижня 11 для поліпшення поєднання штиря 15 зі стрижнем 11. На Фіг.17 показані засоби для полегшення видалення інструмента 10 з штабеля в засобах зберігання. На цьому кресленні стрижень 11 є трубчастим і містить на нижньому кінці мікроштовхач 40, наприклад, пневматичного типу, що встановлений на основі 41 стрижня 11 і живиться через гнучкий трубопровід 42. Поршневий стрижень 43 мікроштовхача проходить через осьовий отвір 44 стрижня 11 і виступає назовні від нього, коли на мікроштовхач 40 подається тиск на мікроштовхачі 40 скидається, Коли живлення. поршень 43 втягується всередину центруючого стрижня 11. Положення мікроштовхача 40 вздовж осі стрижня 11 встановлене таким чином, що поршневий стрижень 43 знаходиться на одному рівні з передостаннім інструментом в штабелі, коли стрижень 11 знаходиться в нижньому положенні. Цей мікроштовхач функціонує так, як описано нижче. На Фіг.18 маніпулятор 16 робота із штирем 15 для встановлення та обертання інструмента 10 підводиться під нерухому опору 3 так, що штир 15 направлений вертикально вгору і розташований співвісно з віссю стрижня 11 для центрування інструментів 10. Коли подається живлення на мікроштовхач, це примушує поршневий стрижень 43 вийти в радіальному напрямку, блокуючи передостанній інструмент штабеля на стрижні 11. На наступному етапі, показаному на Фіг.19, маніпулятор 16 перемістився вертикально вгору так, що верхній кінець штиря 15 входить між горизонтальними консолями опор 3 та 5 і 82321 12 знаходиться всередині осьового отвору найнижчого інструмента 10 штабеля. У цьому положенні центруючий стрижень 11 пристрою згідно з винаходом виштовхнутий назад вгору верхнім кінцем штиря 15 і підіймає передостанній інструмент 10 штабеля для того, щоб перемістити його по осі від останнього інструмента 10, встановленого на штирі 15. Як показано на Фіг.20, наступний етап полягає в переміщенні маніпулятора 16 горизонтально у напрямку, паралельному опорним консолям 3 та 5 для видалення із штабеля найнижчого інструмента 10, встановленого на штирі 15. Коли цей інструмент 10 видаляється, він не зачіпає передостанній інструмент в штабелі, який утримується на відстані від нього стрижнем 11 і мікроштовхачем 40. Потім стрижень 11 повертається назад вниз, як показано на Фіг.21, тиск на мікроштовхачі 40 скидається, звільняючи штабель інструментів, який повертається назад внизВнаіншому 5, як показано на Фіг.22. опору варіанті здійснення винаходу (не показаний) центруючий стрижень 11 встановлений так, щоб обертатися на горизонтальній консолі 12 навколо горизонтальної осі, перпендикулярної стрижню 11 і консолі 12 так, щоб він міг обертатися навколо цієї осі, коли найнижчий інструмент 10 забирається із штабеля, якщо це видалення надає на стрижень 11 зусилля, більше, ніж заздалегідь встановлене значення (наприклад, встановлене за допомогою впливу поперечної сили на зразок). Таким чином можна запобігти випадковому витягуванню стрижня 11. Передбачені такі засоби, як датчик, так що обертання стрижня 11 запускає сигнал для попередження оператора. 13 82321 14 15 82321 16 17 Комп’ютерна верстка Т. Чепелева 82321 Підписне 18 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for automatically mounting and dismantling tools on robot
Автори англійськоюNavar Pierre
Назва патенту російськоюУстройство для автоматической установки и демонтажа инструментов на роботе
Автори російськоюНавар Пьер
МПК / Мітки
МПК: B23Q 3/155, B27B 5/00, B23Q 7/10, B25J 15/04
Мітки: демонтажу, встановлення, автоматичного, роботи, пристрій, інструментів
Код посилання
<a href="https://ua.patents.su/9-82321-pristrijj-dlya-avtomatichnogo-vstanovlennya-ta-demontazhu-instrumentiv-na-roboti.html" target="_blank" rel="follow" title="База патентів України">Пристрій для автоматичного встановлення та демонтажу інструментів на роботі</a>
Набір стоматологічних інструментів
Номер патенту: 37158
Опубліковано: 16.04.2001
Автори: Шарко Анатолій Костянтинович, Хохлова Тамара Володимирівна
МПК: A61C 3/00
Мітки: стоматологічних, набір, інструментів
Текст:
...Шарко Ана 37158 червоного, для гладилки - зеленого, для штопфера - чорного, для шпателя - білого, для пінцета жовтого, приведе до звикання лікаря-стоматолога до кольору, він не буде придивлятись та напружу вати увагу при виборі інструмента, а буде відразу, не замислюючись, боковим зором розпізнавати необхідний інструмент. При цьому продуктивність праці лікарів-стоматологів значно підвищиться. ...
Пристрій для санітарного захисту гінекологічних інструментів
Номер патенту: 31303
Опубліковано: 10.04.2008
Автори: Соклакова Олександра Василівна, Власюк Жанна Леонтіївна, Сушко Олексій Борисович
МПК: A61D 7/00
Мітки: інструментів, пристрій, гінекологічних, санітарного, захисту
Формула / Реферат:
Пристрій для санітарного захисту гінекологічних інструментів, що містить тонкостінний, змотаний в рулон багатосекційний полімерний рукав, який відрізняється тим, що рукав має довжину 450±1,0 мм (для ректо- і візоцервікального) та 100±1,0 мм (для маноцервікального) штучного осіменіння, діаметр 16±1,0 мм, товщину стінки 36,4±0,5 мікрон, секції рукава виконані в формі герметичних рівнобедрених трапецій з довжиною, меншою від основи, що дорівнює...
Пристрій для зберігання стоматологічних інструментів
Номер патенту: 5913
Опубліковано: 15.03.2005
Автор: Шимченко Олександр Емільович
МПК: A61C 19/02
Мітки: зберігання, пристрій, інструментів, стоматологічних
Формула / Реферат:
1. Пристрій для зберігання стоматологічних інструментів, що містить панельний елемент з отворами для розміщення борів, який відрізняється тим, що панельний елемент виконаний у вигляді ~ -подібного профілю з опорною планкою по одному краю, на поверхні опорної планки по її довжині виконаний спрямований до центральної частини профілю виступ, переважно паралельний розташованій над ним частині профілю, а пристрій додатковомістить кришку,...
Пристрій для струнних музичних інструментів
Номер патенту: 76329
Опубліковано: 17.07.2006
Автор: Юр'єв Флоріан Ілліч
Мітки: пристрій, музичних, інструментів, струнних
Формула / Реферат:
1. Пристрій для струнних музичних інструментів у вигляді пружини, що закріплена на внутрішньому боці верхньої деки під ребром жорсткості та що має два вільні кінці, один з яких закріплено за допомогою регулювального гвинта на верхній деці, а другий кінець установлено з упором на нижній деці, який відрізняється тим, що пружину виконано ресорною і з'єднано в центральній частині з ребром жорсткості.2. Пристрій за п. 1, який відрізняється...
Пристрій для реєстрації рельєфу поверхні абразивних інструментів на металевій зв’язці
Номер патенту: 75483
Опубліковано: 17.04.2006
Автори: Азарова Наталя Вікторівна, Константинов Сергій Всеволодович, Цокур Віктор Пантелійович, Полтавець Валерій Васильович, Литвиненко Олександр Васильович, Матюха Петро Григорович
Мітки: рельєфу, металевій, пристрій, зв'язці, реєстрації, абразивних, інструментів, поверхні
Формула / Реферат:
Пристрій для реєстрації рельєфу поверхні абразивних інструментів на металевій зв'язці, що містить струмопровідну щупальну голку, датчик переміщення голки, ключовий елемент, керуючий вхід якого підключений до щупальної голки, джерело струму, один з полюсів якого з'єднаний з землею, а другий призначений для підключення до струмопровідної зв'язки алмазного інструмента, і блок реєстрації, який відрізняється тим, що як блок реєстрації використаний...
Наступний патент: Застосування алкілфосфохолінів в комбінації з протипухлинними лікарськими засобами
Випадковий патент: Спосіб розливу рідин у ємності