Сміттєвоз
Номер патенту: 90157
Опубліковано: 12.05.2014

Формула / Реферат
1. Сміттєвоз, що містить базовий автомобіль, встановлений на базовому автомобілі бункер із задньою приймальною ємністю, всередині якої розміщений механізм завантаження сміття в бункер, гідравлічну систему та електронний керувальний пристрій, бункер оснащений виштовхувальною плитою, встановленою всередині бункера з можливістю зворотно-поступального переміщення за допомогою гідроциліндра, механізм завантаження сміття в бункер виконаний у вигляді несучої плити, встановленої з можливістю зворотно-поступального переміщення вгору і вниз за допомогою гідроциліндрів, і пресувальної плити, закріпленої на нижньому кінці несучої плити з можливістю повороту вперед і назад за допомогою гідроциліндрів, гідравлічна система включає джерело гідравлічного тиску і зв'язані з ним магістраллю гідравлічні розподільники з електромагнітними приводами золотників керування гідроциліндрами несучої і пресувальної плит, електронний керувальний пристрій містить блок керування, датчик гідравлічного тиску, вбудований в магістраль і налагоджений на тиск спрацьовування, датчик верхнього положення несучої плити і вбудований в блок керування програмований мікропроцесор, при цьому датчик гідравлічного тиску в магістралі і датчик верхнього положення несучої плити підключені до входів блока керування, до виходів блока керування підключені електромагніти приводів золотників керування гідроциліндрами несучої і пресувальної плит, а програмований мікропроцесор містить інформацію про порядок включення згаданих електромагнітів, який відрізняється тим, що електронний керувальний пристрій додатково містить датчик нижнього положення несучої плити, зв'язаний з входом блока керування, несуча плита виконана з можливістю зупинки руху вниз при спрацьовуванні датчика тиску в магістралі і неспрацьовуванні датчика нижнього положення несучої плити та подальшого переміщення вгору на встановлену величину від включеного відповідного електромагніта, при цьому програмований мікропроцесор містить інформацію про параметр часу включеного стану електромагніта, значення якого пропорційне величині переміщення вгору несучої плити, а пресувальна плита виконана з можливістю зупинки повороту вперед при спрацьовуванні датчика тиску в магістралі та подальшого повороту назад від включеного відповідного електромагніта.
2. Сміттєвоз за п. 1, який відрізняється тим, що пресувальна плита виконана з можливістю подальшого повороту назад на встановлену величину, пропорційну значенню параметра часу включеного стану електромагніта, при цьому інформація про параметр часу міститься в програмованому мікропроцесорі.
3. Сміттєвоз за п. 1 або 2, який відрізняється тим, що гідроциліндр виштовхувальної плити виконаний телескопічним, гідравлічна система додатково містить зв'язаний з джерелом гідравлічного тиску гідравлічний розподільник з електромагнітним приводом золотника керування гідроциліндром виштовхувальної плити, електронний керувальний пристрій містить датчик гідравлічного тиску в поршневій порожнині гідроциліндра виштовхувальної плити, з'єднаний з входом блока керування, до виходу блока керування підключений щонайменше один електромагніт приводу золотника керування гідроциліндром виштовхувальної плити, а виштовхувальна плита виконана з можливістю переміщення в напрямку завантаження бункера на встановлену величину від включеного електромагніта при спрацьовуванні датчика тиску в магістралі і неспрацьовуванні датчика верхнього положення несучої плити і датчика тиску в поршневій порожнині гідроциліндра виштовхувальної плити, при цьому програмований мікропроцесор містить інформацію про параметр часу включеного стану електромагніта, значення якого пропорційне величині переміщення виштовхувальної плити в напрямку завантаження бункера.
4. Сміттєвоз за пп. 1 або 2, або 3, який відрізняється тим, що програмований мікропроцесор додатково містить інформацію про час руху несучої плити від датчика нижнього положення до датчика верхнього положення і від датчика верхнього положення до датчика нижнього положення.
Текст
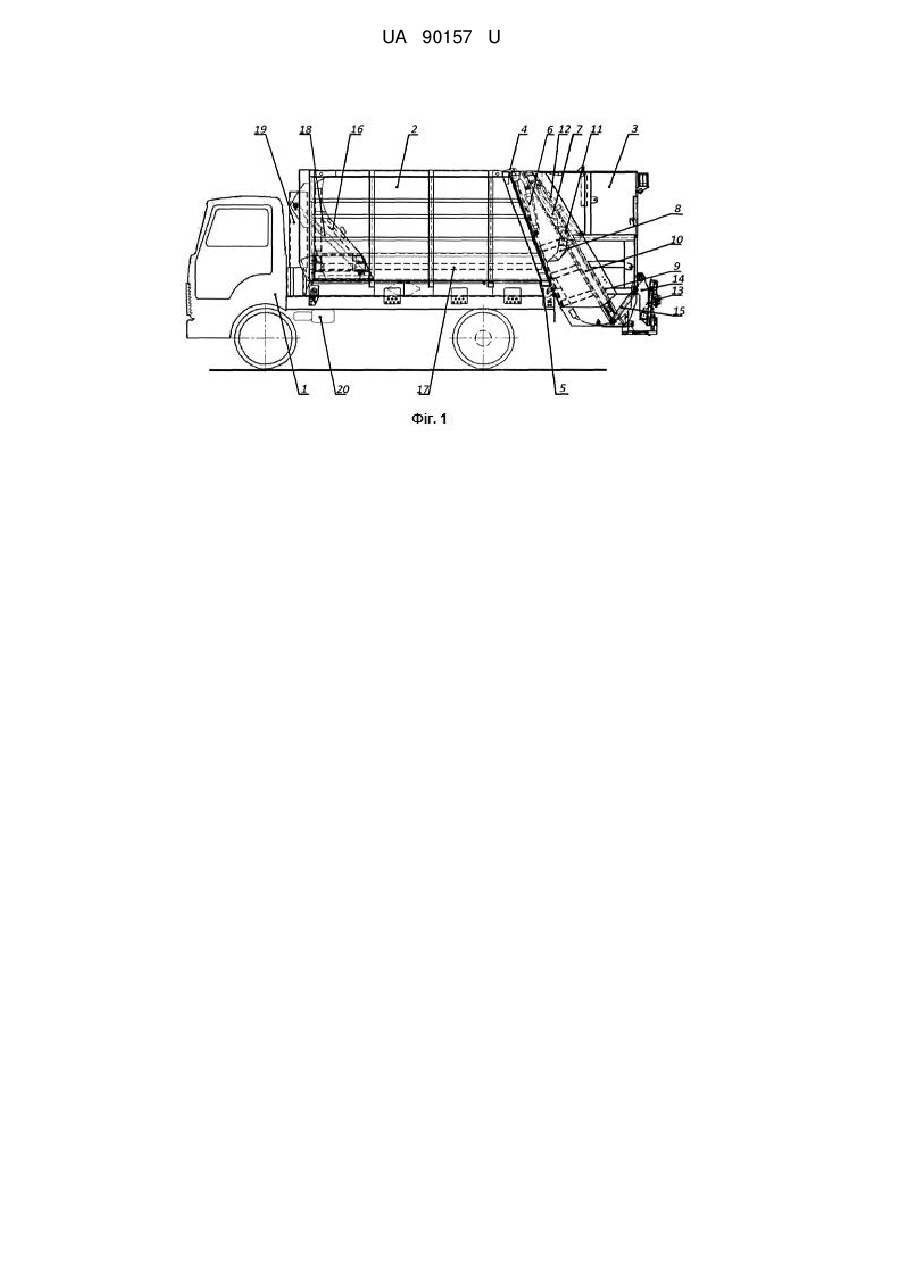
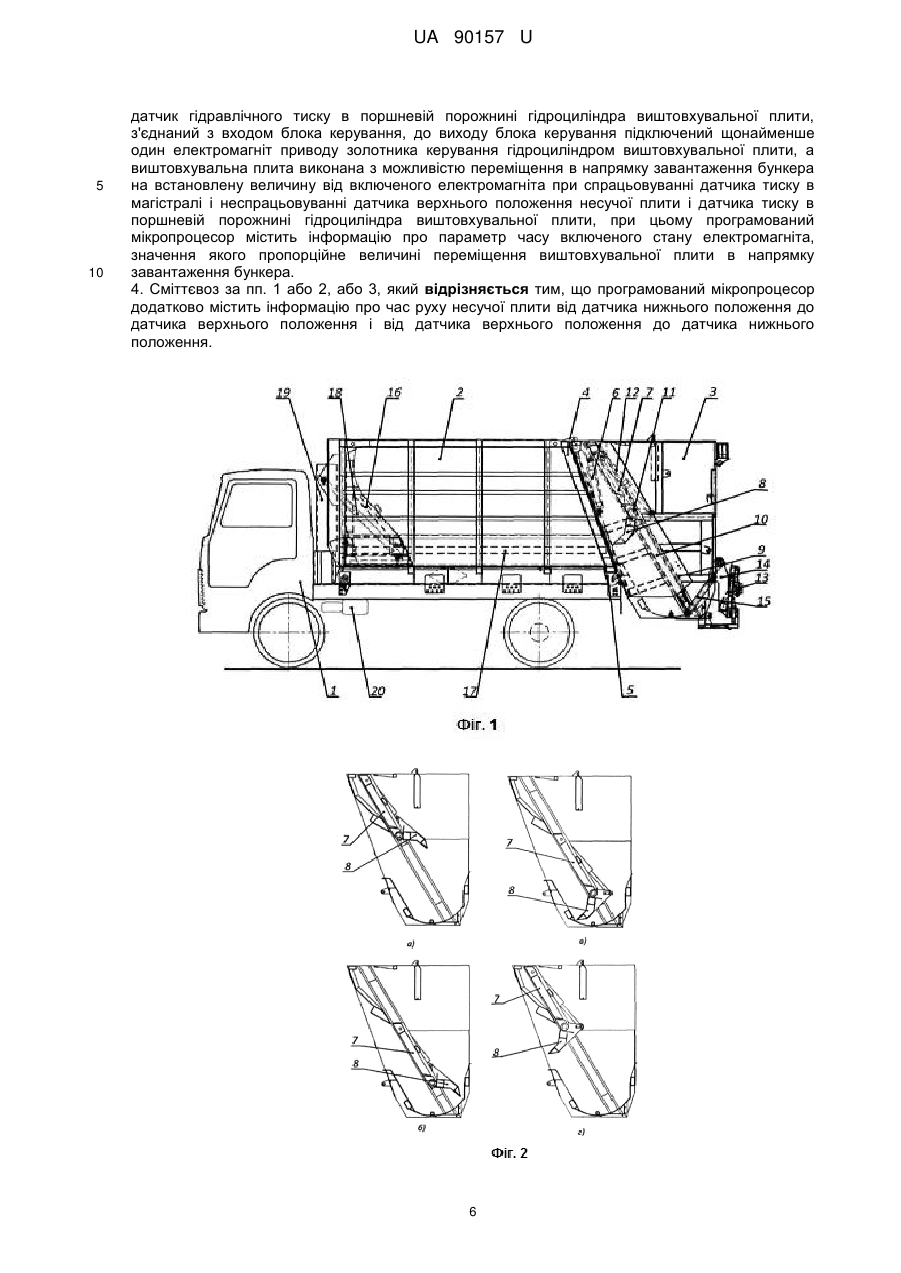
Реферат: Сміттєвоз містить базовий автомобіль, встановлений на базовому автомобілі бункер із задньою приймальною ємністю, всередині якої розміщений механізм завантаження сміття в бункер, гідравлічну систему та електронний керувальний пристрій, бункер оснащений виштовхувальною плитою, встановленою всередині бункера з можливістю зворотнопоступального переміщення за допомогою гідроциліндра, механізм завантаження сміття в бункер виконаний у вигляді несучої плити, встановленої з можливістю зворотно-поступального переміщення вгору і вниз за допомогою гідроциліндрів, і пресувальної плити, закріпленої на нижньому кінці несучої плити з можливістю повороту вперед і назад за допомогою гідроциліндрів, гідравлічна система включає джерело гідравлічного тиску і зв'язані з ним магістраллю гідравлічні розподільники з електромагнітними приводами золотників керування гідроциліндрами несучої і пресувальної плит, електронний керувальний пристрій містить блок керування, датчик гідравлічного тиску, вбудований в магістраль і налагоджений на тиск спрацьовування, датчик верхнього положення несучої плити і вбудований в блок керування програмований мікропроцесор, при цьому датчик гідравлічного тиску в магістралі і датчик верхнього положення несучої плити підключені до входів блока керування, до виходів блока керування підключені електромагніти приводів золотників керування гідроциліндрами несучої і пресувальної плит, а програмований мікропроцесор містить інформацію про порядок включення згаданих електромагнітів. Електронний керувальний пристрій додатково містить датчик нижнього положення несучої плити, зв'язаний з входом блока керування, несуча плита виконана з можливістю зупинки руху вниз при спрацьовуванні датчика тиску в магістралі і неспрацьовуванні датчика нижнього положення несучої плити та подальшого переміщення вгору на встановлену величину від включеного відповідного електромагніта, при цьому програмований мікропроцесор містить інформацію про параметр часу включеного стану електромагніта, значення якого пропорційне величині переміщення вгору несучої плити, а пресувальна плита виконана з можливістю зупинки повороту вперед при спрацьовуванні датчика тиску в магістралі та подальшого повороту назад від включеного відповідного електромагніта. UA 90157 U (12) UA 90157 U UA 90157 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до спеціалізованих автомобілів, призначених для завантаження, ущільнення, транспортування і вивантаження сміття. Відомий сміттєвоз за патентом RU 2304554 С2, що містить базовий автомобіль, встановлений на базовому автомобілі бункер із задньою приймальною ємністю, всередині якої розміщений механізм завантаження сміття в бункер, гідравлічну систему та електронний керувальний пристрій. Усередині бункера встановлена виштовхувальна плита з можливістю зворотно-поступального переміщення за допомогою гідроциліндра. Механізм завантаження сміття в бункер включає несучу плиту, встановлену з можливістю зворотно-поступального переміщення вгору і вниз за допомогою гідроциліндрів, і пресувальну плиту, закріплену на нижньому кінці несучої плити з можливістю повороту вперед і назад за допомогою гідроциліндрів. Гідравлічна система містить джерело гідравлічного тиску і зв'язані з ним магістраллю гідравлічні розподільники з електромагнітними приводами золотників керування гідроциліндрами несучої і пресувальної плит. Електронний керувальний пристрій містить блок керування, датчик гідравлічного тиску, вбудований в магістраль і налагоджений на тиск спрацьовування, датчик верхнього положення несучої плити і вбудований в блок керування програмований мікропроцесор. Датчик гідравлічного тиску в магістралі і датчик верхнього положення несучої плити підключені до входів блока керування. До виходів блока керування підключені електромагніти приводів золотників керування гідроциліндрами несучої і пресувальної плит, при цьому програмований мікропроцесор містить інформацію про порядок включення згаданих електромагнітів. Недоліком відомого аналога є те, що конструкція сміттєвоза забезпечує безперервний цикл завантаження сміття тільки в умовах ідеального стану завантажуваного сміття. У разі, якщо сміття, перевантажене з контейнера у приймальну ємність бункера, має підвищену щільність або в ньому опинився твердий габаритний предмет, механізм завантаження сміття повністю припиняє свою роботу і після вилучення предмета або розпушування сміття потрібен повторний запуск гідросистеми. Це звужує технологічні можливості сміттєвоза і знижує надійність його роботи. В основу корисної моделі поставлена задача створення сміттєвоза, конструкція якого дозволить забезпечити безперервний цикл завантаження у бункер сміття будь-якого виду і складу, у тому числі такого, що має щільні і об'ємні тверді включення, підвищити надійність роботи сміттєвоза, при цьому підвищити щільність пресування сміття. Поставлена задача вирішується тим, що у сміттєвозі, який містить базовий автомобіль, встановлений на базовому автомобілі бункер із задньою приймальною ємністю, всередині якої розміщений механізм завантаження сміття в бункер, гідравлічну систему та електронний керувальний пристрій, бункер оснащений виштовхувальною плитою, встановленою всередині бункера з можливістю зворотно-поступального переміщення за допомогою гідроциліндра, механізм завантаження сміття в бункер виконаний у вигляді несучої плити, встановленої з можливістю зворотно-поступального переміщення вгору і вниз за допомогою гідроциліндрів, і пресувальної плити, закріпленої на нижньому кінці несучої плити з можливістю повороту вперед і назад за допомогою гідроциліндрів, гідравлічна система включає джерело гідравлічного тиску і зв'язані з ним магістраллю гідравлічні розподільники з електромагнітними приводами золотників керування гідроциліндрами несучої і пресувальної плит, електронний керувальний пристрій містить блок керування, датчик гідравлічного тиску, вбудований в магістраль і налагоджений на тиск спрацьовування, датчик верхнього положення несучої плити і вбудований в блок керування програмований мікропроцесор, при цьому датчик гідравлічного тиску в магістралі і датчик верхнього положення несучої плити підключені до входів блока керування, до виходів блока керування підключені електромагніти приводів золотників керування гідроциліндрами несучої і пресувальної плит, а програмований мікропроцесор містить інформацію про порядок включення згаданих електромагнітів, згідно з корисною моделлю, електронний керувальний пристрій додатково містить датчик нижнього положення несучої плити, зв'язаний з входом блока керування, несуча плита виконана з можливістю зупинки руху вниз при спрацьовуванні датчика тиску в магістралі і неспрацьовуванні датчика нижнього положення несучої плити та подальшого переміщення вгору на встановлену величину від включеного відповідного електромагніту, при цьому програмований мікропроцесор містить інформацію про параметр часу включеного стану електромагніту, значення якого пропорційне величині переміщення вгору несучої плити, а пресувальна плита виконана з можливістю зупинки повороту вперед при спрацьовуванні датчика тиску в магістралі та подальшого повороту назад від включеного відповідного електромагніта. 1 UA 90157 U 5 10 15 20 25 30 35 40 45 50 55 Пресувальна плита виконана з можливістю подальшого повороту назад на встановлену величину, пропорційну значенню параметра часу включеного стану електромагніта, при цьому інформація про параметр часу міститься в програмованому мікропроцесорі. Гідроциліндр виштовхувальної плити виконаний телескопічним, гідравлічна система додатково містить зв'язаний з джерелом гідравлічного тиску гідравлічний розподільник з електромагнітним приводом золотника керувння гідроциліндром виштовхувальної плити, електронний керувальний пристрій містить датчик гідравлічного тиску в поршневій порожнині гідроциліндра виштовхувальної плити, з'єднаний з входом блока керування, до виходу блока керування підключений щонайменше один електромагніт приводу золотника керування гідроциліндром виштовхувальної плити, а виштовхувальна плита виконана з можливістю переміщення в напрямку завантаження бункера на встановлену величину від включеного електромагніта при спрацьовуванні датчика тиску в магістралі і неспрацьовуванні датчика верхнього положення несучої плити і датчика тиску в поршневій порожнині гідроциліндра виштовхувальної плити, при цьому програмований мікропроцесор містить інформацію про параметр часу включеного стану електромагніта, значення якого пропорційне величині переміщення виштовхувальної плити в напрямку завантаження бункера. Програмований мікропроцесор додатково містить інформацію про час руху несучої плити від датчика нижнього положення до датчика верхнього положення і від датчика верхнього положення до датчика нижнього положення. Суть сміттєвоза, що заявляється, пояснюється представленими фігурами креслення. На фіг. 1 показаний загальний вигляд сміттєвоза; на фіг. 2 - схема роботи механізму завантаження сміття, де показані положення несучої і пресувальної плит, у тому числі: а) несуча плита у верхньому положенні, пресувальна плита відведена назад; б) несуча плита в нижньому положенні, пресувальна плита відведена назад; в) несуча плита в нижньому положенні, пресувальна плита повернута вниз - вперед; г) несуча плита у верхньому положенні, пресувальна плита повернута вперед; на фіг. 3 - гідравлічна і електрична блок-схема сміттєвоза. Сміттєвоз містить базовий автомобіль 1, на якому встановлений бункер 2 із задньою приймальною ємністю 3, гідравлічну систему та електронний керувальний пристрій. Приймальна ємність 3 з'єднана з бункером 2 у верхній його частині за допомогою шарнірів 4, а у нижній частині бункера 2 за допомогою фіксувальних гаків 5. Приймальна ємність 3 оснащена гідроциліндрами 6, які у вихідному положенні притискають приймальну ємність 3 до бункера 2. Усередині приймальної ємності 3 розташований механізм завантаження сміття в бункер 2, що включає несучу 7 і пресувальну 8 плити. Несуча плита 7 встановлена в напрямних 9, розміщених на бічних стінках приймальної ємності 3 з можливістю зворотно-поступального переміщення вгору і вниз за допомогою гідроциліндрів 10. Пресувальна плита 8 закріплена на нижньому кінці несучої плити 7 через шарнір 11 з можливістю повороту вперед і назад за допомогою гідроциліндрів 12, закріплених на несучій плиті 7. У нижній частині приймальної ємності 3 розташований механізм 13 засипки сміття в приймальну ємність 3. Механізм 13 шарнірно з'єднаний з приймальною ємністю 3 і оснащений кантувачем 14 з гідроциліндрами 15. Усередині бункера 2 розміщена виштовхувальна плита 16, встановлена в напрямних 17 з можливістю зворотно-поступального переміщення уздовж бункера 2 за допомогою телескопічного гідроциліндра 18. У положенні завантаження бункера 2 виштовхувальна плита 16 знаходиться під впливом тиску від гідроциліндра 18, що перешкоджає вільному руху плити 16 у бік завантаження бункера 2 (тиск підпору плити 16). Гідравлічна система сміттєвоза включає масляний бак 19, масляний насос 20, що є джерелом гідравлічного тиску, запобіжний клапан 21, підключений до нагнітальної порожнини насоса 20 і масляного бака 19. До нагнітальної порожнини насоса 20 приєднані дві магістралі 22 і 23. До магістралі 22 підключені гідравлічні розподільники 24 і 25 з електромагнітними приводами золотників. До магістралі 23 підключений гідравлічний розподільник 26 з електромагнітним приводом золотників. До гідравлічного розподільника 24 приєднані обома порожнинами гідроциліндри 10 несучої плити 7, до гідравлічного розподільника 25 підключені обома порожнинами гідроциліндри 12 пресувальної плити 8, до гідравлічного розподільника 26 підключений обома порожнинами гідроциліндр 18 виштовхувальної плити 16. Гідравлічний розподільник 24 оснащений електромагнітами 27 і 28 для керування гідроциліндрами 10, гідравлічний розподільник 25 оснащений електромагнітами 29 і 30 для керування гідроциліндрами 12, а гідравлічний розподільник 26 оснащений електромагнітами 31 і 32 для керування гідроциліндром 18. 2 UA 90157 U 5 10 15 20 25 30 35 40 45 50 55 60 Електронний керувальний пристрій містить блок керування 33, що включає в себе вбудований програмований процесор, датчик 34 верхнього положення несучої плити, датчик 35 нижнього положення несучої плити 7, датчик 36 розкритого положення пресувальної плити 8 і датчики 37 і 38 гідравлічного тиску. Датчики 34 і 35 закріплені відповідно у верхній і нижній частинах задньої приймальної ємності 3 і підключені до входів блока керування 33. Датчик 36 встановлений на несучій плиті 7 і підключений до входу блока керування 33. Датчик 37 вмонтований в магістраль 22, а датчик 38 підключений до трубопроводу поршневої порожнини гідроциліндра 18, при цьому датчики 37 і 38 з'єднані з входами блока керування 33. До виходів блока керування 33 підключені обмотки електромагнітів 27-31. У програмований процесор занесена інформація про значення тиску спрацьовування датчиків 37 і 38, причому значення тиску спрацьовування датчиків 37 і 38 не перевищують значення тиску спрацьовування запобіжного клапана 21, а також інформація про порядок включення електромагнітів 27-31. У пам'ять процесора введені параметри часу руху несучої плити 7 від датчика 35 нижнього положення до датчика 34 верхнього положення і навпаки - від датчика 34 верхнього положення до датчика 35 нижнього положення. У пам'ять процесора додатково введені: параметр часу, на який включається електромагніт 27 і значення якого пропорційне величині переміщення вгору несучої плити 7 при неспрацьовуванні датчика 35 нижнього положення, перевищенні встановленого часу руху несучої плити 7 від датчика 34 верхнього положення до датчика 35 нижнього положення і підвищенні тиску в магістралі 22 до встановленого значення тиску спрацьовування датчика 37; параметр часу, на який включається електромагніт 29 і значення якого пропорційне величині переміщення назад-вгору пресувальної плити 8 при підвищенні тиску в магістралі 22 до встановленого значення тиску спрацьовування датчика 37; параметр часу, на який включається електромагніт 31 і значення якого пропорційне величині переміщення виштовхувальної плити 16 у бік завантаження сміття при перевищенні тиску пресованого сміття встановленого тиску підпору виштовхувальної плити 16 і спрацьовуванні датчика тиску 38; параметр часу, на який включається електромагніт 31 і значення якого пропорційне величині переміщення виштовхувальної плити 16 у бік завантаження сміття при неспрацьовуванні датчика 34 верхнього положення несучої плити 7, перевищенні встановленого часу руху несучої плити 7 від датчика 35 нижнього положення до датчика 34 верхнього положення, підвищенні тиску в магістралі 22 до встановленого значення тиску спрацьовування датчика 37 і неспрацьовуванні датчика тиску 38. До входів блока керування 33 підключені кнопка 39 для запуску одиночного циклу пресування, кнопка 40 для запуску безперервного циклу пресування, кнопка 41 для підйому несучої плити 7, кнопка 42 для включення роботи пресувальної плити 8 і кнопка 43 для включення руху виштовхувальної плити 16 на вивантаження сміття з бункера 2. Кнопка 43 з'єднана з електромагнітом 32 гідравлічного розподільника 26. Кнопки 39-43 розташовані на пульті керування 44. Робота сміттєвоза здійснюється наступним чином. Контейнер зі сміттям захоплюється кантувачем 14 механізму 13 засипки сміття, який пересипає сміття з контейнера в приймальну ємність 3. Несуча плита 7 знаходиться у верхньому положенні, пресувальна плита 8 знаходиться в закритому положенні (повернута у бік виштовхувальної плити 18). Кнопкою 39 або 40 на пульті керування 44 включають електронний керувальний пристрій і за командою програмованого процесора із блока керування 33 надходить сигнал на включення електромагніта 29. На обмотку електромагніта 29 подається електричний струм і включається золотник гідравлічного розподільника 25. Робоча рідина під тиском надходить із масляного насоса 20 у штокові порожнини гідроциліндрів 12, і пресувальна плита 8, повертаючись навколо шарніра 11, відводиться назад-вгору (фіг. 2а). При досягненні кінцевого верхнього (розкритого) положення пресувальної плити 8 датчик 36 розкритого положення плити 8 подає сигнал у блок керування 33. Згідно закладеної в процесор програмі порядку включення електромагнітів 27-30 відбувається виключення електромагніта 29 і включення електромагніта 28. Електричний струм подається на обмотку електромагніта 28 і включається золотник гідравлічного розподільника 24. Робоча рідина з масляного насоса 20 надходить у штокові порожнини гідроциліндрів 10 і вони переміщують несучу плиту 7 вниз (фіг. 2б). При досягненні несучою плитою 7 нижнього кінцевого положення датчик 35 нижнього положення плити 7 подає сигнал у блок керування 33. Електромагніт 28 виключається і включається електромагніт 30. Електричний струм подається на обмотку електромагніта 30 і включається золотник гідравлічного розподільника 25. Робоча рідина з масляного насоса 20 надходить у поршневі 3 UA 90157 U 5 10 15 20 25 30 35 40 45 50 55 порожнини гідроциліндрів 12 і вони повертають пресувальну плиту 8 вниз-вперед. Пресувальна плита 8, повертаючись навколо шарніра 11, вигрібає сміття, що знаходиться внизу приймальної ємності 3 (фіг. 2в), і робить первинне пресування сміття. При досягненні пресувальною плитою 8 крайнього закритого положення тиск у магістралі 22 збільшується і датчик тиску 37 подає сигнал у блок керування 33. Електромагніт 30 виключається і включається електромагніт 27, який забезпечує включення золотника гідравлічного розподільника 24. Робоча рідина з масляного насоса 20 надходить у поршневі порожнини гідроциліндрів 10, і вони переміщують несучу плиту 7 вгору (фіг. 2г). Сміття, що знаходиться між пресувальною 8 і несучою 7 плитами переміщується вгору, простір між виштовхувальною плитою 18 і несучою плитою 7 звужується у верхній частині приймальної ємності 3, де відбувається вторинне пресування сміття. Якщо тиск пресованого сміття на виштовхувальну плиту 16 перевищить встановлений тиск підпору виштовхувальної плити 16, датчик тиску 38 подає про це сигнал у блок керування 33. За сигналом із блока керування 33 на запрограмований період часу включається електромагніт 31 гідравлічного розподільника 26. Робоча рідина з масляного насоса 20 надходить у поршневу порожнину гідроциліндра 18 і плита 16 пересувається у бік завантаження сміття. При досягненні несучою плитою 7 крайнього верхнього положення датчик положення 34 посилає сигнал на вхід блока керування 33. Електромагніт 27 виключається і рух несучої плити 7 вгору припиняється. Після цього із блока керування 33 надходить команда на виключення електронного керувального пристрою (при включенні кнопкою 39) або команда на продовження роботи (при включенні кнопкою 40). У цьому випадку процес завантаження сміття повторюється. У разі, якщо щільність сміття, перевантаженого у приймальну ємність 3 із сміттєвих контейнерів, не дозволяє несучій плиті 7 досягти крайнього нижнього положення, датчик 35 нижнього положення несучої плити 7 не подає сигнал на блок керування 33, а фактичний час переміщення несучої плити 7 вниз перевищило введений у пам'ять процесора параметр часу руху несучої плити 7 від датчика 34 до датчика 35, при цьому тиск у магістралі 22 збільшується і датчик тиску 37 подає сигнал у блок керування 33, електромагніт 28 виключається і рух плити 7 вниз припиняється. За сигналом із блока керування 33 на запрограмований період часу включається електромагніт 27 гідравлічного розподільника 24. Робоча рідина з масляного насоса 20 надходить у поршневі порожнини гідроциліндрів 10, несуча плита 7 пересувається вгору на певну відстань. Надалі оператор приймає рішення: витягти з приймальної ємності 3 великогабаритні предмети, що потрапили туди зі сміттям, чи розпушити ущільнене сміття, або продовжити роботу натисканням кнопки 39 або 40 на пульті керування 44. У цьому випадку цикл буде продовжений з положення, коли несуча плита 7 знаходиться вище нижнього кінцевого положення і пресувальна плита 8 захопить верхню частину сміття. У разі, якщо несуча плита 7 при русі вниз досягла датчика 35 нижнього положення, програма виконала переключення електромагніта 28 на електромагніт 30, робоча рідина надійшла в поршневі порожнини гідроциліндрів 12, однак поворот вперед-вниз пресувальної плити 8 не виконаний, тиск робочої рідини в магістралі 22 зростає і по сигналу датчика 37 електромагніт 30 виключається. За сигналом із блока керування 33 на запрограмований період часу включається електромагніт 29 гідравлічного розподільника 25. Робоча рідина з масляного насоса 20 надходить у штокові порожнини гідроциліндрів 12, пресувальна плита 8 відводиться назад-вгору на певну відстань, після чого на запрограмований період часу включається електромагніт 27 гідравлічного розподільника 24. Робоча рідина надходить у поршневі порожнини гідроциліндрів 10 і несуча плита 7 пересувається вгору на певну відстань. Надалі оператор приймає рішення: витягти з приймальної ємності 3 предмети, що заважають роботі пресувальної плити 8, або продовжити роботу натисканням кнопки 39 або 40 на пульті керування 44. У цьому випадку цикл буде продовжений з положення, коли несуча плита 7 знаходиться вище нижнього кінцевого положення і пресувальна плита 8 захопить верхню частину сміття. Якщо у процесі пресування сміття між несучою 7 і пресувальною 8 плитами і виштовхувальною плитою 16 застряв довгомірний або об'ємний предмет, при цьому фактичний час руху несучої плити 7 вгору перевищив введений у пам'ять процесора параметр часу руху несучої плити 7 від датчика 35 до датчика 34, у блок керування 33 не надходить сигнал від датчика положення 34, тиск у магістралі 22 підвищується, про що сигналізує датчик 37, а тиск між виштовхувальною плитою 16 і плитами 7 і 8 недостатній для подолання встановленого у гідроциліндрі 18 тиску підпору плити 16 і сигнал від датчика 38 не надходить у блок керування 33, згідно з програмою на запрограмований час включається електромагніт 31 гідравлічного розподільника 26 і плита 16 переміщується у бік завантаження сміття на певну відстань, що дозволяє несучій плиті 7 продовжити рух вгору до кінцевого верхнього положення. 4 UA 90157 U 5 10 15 20 На завершальній стадії заповнення бункера 2 сміттям при русі несучої плити 7 вгору, в положенні, коли сигнал від датчика положення 34 не надходить, а фактичний час переміщення несучої плити 7 вгору перевищив введений у пам'ять процесора параметр часу руху несучої плити 7 від датчика 35 до датчика 34, тиск у магістралі 22 збільшується, із блока керування 33 з триразовим дублюванням надходить сигнал на відведення виштовхувальної плити 16 у бік завантаження бункера 2. Якщо при цьому виштовхувальна плита не переміщується у бік завантаження бункеру 2, а положення несучої плити 7 не змінюється (вона не рухається вгору), то із блока керування 33 надходить сигнал на відключення електромагніта 27, після чого виключається електронний керувальний пристрій. Бункер 2 повністю завантажений сміттям. Для розвантаження заповненого сміттям бункера 2 включають гідроциліндри 6, які піднімають задню приймальну ємність 3 поворотом навколо шарнірів 4. Потім кнопкою 43 на пульті керування 44 включають електромагніт 32 гідравлічного розподільника 26. Робоча рідина надходить у штокову порожнину гідроциліндра 18, який переміщує виштовхувальну плиту 16 у бік вивантаження сміття. Натисканням кнопки 39 на пульті керування 44 роблять одиночний цикл пресування для очищення приймальної ємності 3 від залишків сміття. Потім гідроциліндром 18 встановлюють виштовхувальну плиту 16 у вихідне положення, а гідроциліндрами 6 повертають приймальну ємність 3 у вихідне положення і з'єднують її з бункером 2. Пропонована конструкція сміттєвоза дозволяє здійснювати безперервний цикл завантаження сміття в бункер, без перезапуску гідравлічної системи, у випадку, якщо сміття має збільшену щільність або нестандартні включення у вигляді твердих чи габаритних предметів, що підвищує надійність роботи сміттєвоза, розширює його технологічні можливості. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 35 40 45 50 55 60 1. Сміттєвоз, що містить базовий автомобіль, встановлений на базовому автомобілі бункер із задньою приймальною ємністю, всередині якої розміщений механізм завантаження сміття в бункер, гідравлічну систему та електронний керувальний пристрій, бункер оснащений виштовхувальною плитою, встановленою всередині бункера з можливістю зворотнопоступального переміщення за допомогою гідроциліндра, механізм завантаження сміття в бункер виконаний у вигляді несучої плити, встановленої з можливістю зворотно-поступального переміщення вгору і вниз за допомогою гідроциліндрів, і пресувальної плити, закріпленої на нижньому кінці несучої плити з можливістю повороту вперед і назад за допомогою гідроциліндрів, гідравлічна система включає джерело гідравлічного тиску і зв'язані з ним магістраллю гідравлічні розподільники з електромагнітними приводами золотників керування гідроциліндрами несучої і пресувальної плит, електронний керувальний пристрій містить блок керування, датчик гідравлічного тиску, вбудований в магістраль і налагоджений на тиск спрацьовування, датчик верхнього положення несучої плити і вбудований в блок керування програмований мікропроцесор, при цьому датчик гідравлічного тиску в магістралі і датчик верхнього положення несучої плити підключені до входів блока керування, до виходів блока керування підключені електромагніти приводів золотників керування гідроциліндрами несучої і пресувальної плит, а програмований мікропроцесор містить інформацію про порядок включення згаданих електромагнітів, який відрізняється тим, що електронний керувальний пристрій додатково містить датчик нижнього положення несучої плити, зв'язаний з входом блока керування, несуча плита виконана з можливістю зупинки руху вниз при спрацьовуванні датчика тиску в магістралі і неспрацьовуванні датчика нижнього положення несучої плити та подальшого переміщення вгору на встановлену величину від включеного відповідного електромагніта, при цьому програмований мікропроцесор містить інформацію про параметр часу включеного стану електромагніта, значення якого пропорційне величині переміщення вгору несучої плити, а пресувальна плита виконана з можливістю зупинки повороту вперед при спрацьовуванні датчика тиску в магістралі та подальшого повороту назад від включеного відповідного електромагніта. 2. Сміттєвоз за п. 1, який відрізняється тим, що пресувальна плита виконана з можливістю подальшого повороту назад на встановлену величину, пропорційну значенню параметра часу включеного стану електромагніта, при цьому інформація про параметр часу міститься в програмованому мікропроцесорі. 3. Сміттєвоз за п. 1 або 2, який відрізняється тим, що гідроциліндр виштовхувальної плити виконаний телескопічним, гідравлічна система додатково містить зв'язаний з джерелом гідравлічного тиску гідравлічний розподільник з електромагнітним приводом золотника керування гідроциліндром виштовхувальної плити, електронний керувальний пристрій містить 5 UA 90157 U 5 10датчик гідравлічного тиску в поршневій порожнині гідроциліндра виштовхувальної плити, з'єднаний з входом блока керування, до виходу блока керування підключений щонайменше один електромагніт приводу золотника керування гідроциліндром виштовхувальної плити, а виштовхувальна плита виконана з можливістю переміщення в напрямку завантаження бункера на встановлену величину від включеного електромагніта при спрацьовуванні датчика тиску в магістралі і неспрацьовуванні датчика верхнього положення несучої плити і датчика тиску в поршневій порожнині гідроциліндра виштовхувальної плити, при цьому програмований мікропроцесор містить інформацію про параметр часу включеного стану електромагніта, значення якого пропорційне величині переміщення виштовхувальної плити в напрямку завантаження бункера. 4. Сміттєвоз за пп. 1 або 2, або 3, який відрізняється тим, що програмований мікропроцесор додатково містить інформацію про час руху несучої плити від датчика нижнього положення до датчика верхнього положення і від датчика верхнього положення до датчика нижнього положення. 6 UA 90157 U Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B65F 3/00
Мітки: сміттєвоз
Код посилання
<a href="https://ua.patents.su/9-90157-smittehvoz.html" target="_blank" rel="follow" title="База патентів України">Сміттєвоз</a>
Сміттєвоз

Номер патенту: 84725
Опубліковано: 25.10.2013
Автори: Чхало Віктор Васильович, Чхало Василь Вікторович
МПК: B65F 3/00
Мітки: сміттєвоз
Формула / Реферат:
1. Сміттєвоз, що містить шасі з бункером, оснащеним заднім бортом і завантажувальним вікном, розміщеним у верхній частині бункера, ущільнюючу плиту, встановлену всередині бункера, і механізм завантаження, який містить ківш з шарнірно закріпленою на ньому кришкою і важелі з силовими циліндрами, встановлені шарнірно по боках бункера і шарнірно з'єднані з ковшем, який відрізняється тим, що механізм завантаження обладнаний механізмом фіксації...
Сміттєвоз для транспортування скла
Номер патенту: 62043
Опубліковано: 10.08.2011
Автори: Пенчук Валентин Олексійович, Семенов Іван Володимирович, Даценко Віталій Михайлович
МПК: B65F 3/00
Мітки: сміттєвоз, скла, транспортування
Формула / Реферат:
Сміттєвоз для транспортування скла, який включає кузов для перевезення сміття, який вміщує в себе подрібнювач, гідродвигун, який відрізняється тим, що приймальна частина кузова обладнана подрібнювачем, що надає можливість подрібнювати скло для більш ефективного заповнення кузова для перевезення сміття.
Сміттєвоз

Номер патенту: 51532
Опубліковано: 26.07.2010
Автори: Фішо Філіпп, Бійон Олів'є
МПК: B65F 3/02
Мітки: сміттєвоз
Формула / Реферат:
1. Сміттєвоз, що включає вантажівку (1), обладнану системою вивантаження та накопичення, що містить з одного боку накопичувальний кузов (2) для накопичення вмісту контейнера (3) та з іншого боку - пристрій випорожнення контейнера (3), який включає принаймні одну систему (9) випорожнення контейнера, що містить принаймні один маніпулятор-підйомник (10), обладнаний на одному зі своїх країв захоплювачем (11) для можливості після захоплення...
Пристрій для завантажування сміття

Номер патенту: 69161
Опубліковано: 16.08.2004
Автори: Ільчук Ярослав Лукіч, Калащук Віктор Францович, Рябошапка Сергій Олександрович
МПК: B65F 3/00
Мітки: сміття, завантажування, пристрій
Формула / Реферат:
Пристрій для завантажування сміття, який містить змонтовані на задньому борту сміттєвоза приймальний бункер і поворотний захватно-ущільнюючий елемент, який відрізняється тим, що приймальний бункер оснащений гідромеханічним приводом для повороту навколо горизонтальної осі, а захватно-ущільнюючий елемент виконаний у вигляді плити, установленої з можливістю повороту навколо горизонтальної осі за допомогою гідромеханічного приводу.
Пристрій для керування планшетністю штаби прокату
Номер патенту: 14508
Опубліковано: 15.05.2006
Автори: Попович Микола Гаврилович, Островерхов Микола Якович
МПК: B21B 37/00
Мітки: керування, пристрій, прокату, планшетністю, штаби
Формула / Реферат:
Пристрій для керування планшетністю штаби прокату, що містить датчик розподілу натягу по ширині штаби, виходи якого по числу зон вимірювання з'єднані з входами блока керування з регуляторами, перетворювачі частоти з рекуперативним гальмуванням, входи яких з'єднано з виходами блокa керування, а виходи - із входами лінійних асинхронних двигунів, встановлених під штабою відповідно до зон вимірювання натягу, датчик швидкості штаби, який з'єднано...
Попередній патент: Спосіб одержання суміші тонкодисперсних оксидів-гідроксидів заліза (огз) з магнітними властивостями
Наступний патент: Індукторна електрична машина зі стержневим статором
Випадковий патент: Концентрат водоемульсійної гідравлічної рідини