Спосіб використання зчеплення мвп для вимірювання додаткового навантаження
Номер патенту: 90731
Опубліковано: 25.05.2010
Автори: Меєр Дуейн Фредерік, Аллен Даніель Ейвері, Меррілл Бредлі Аллен, Мейсон Джоул Лі


Формула / Реферат
1. Спосіб визначення додаткового навантаження на двигун транспортного засобу, обладнаного механізмом відбору потужності (МВП) для приводу додаткового обладнання, який включає наступні стадії:
стадію, на якій контролюють частоту обертання вала до зчеплення МВП, а також частоту обертання вала після зчеплення МВП для визначення пробуксовки зчеплення;
стадію, на якій періодично лінійно зменшують тиск зчеплення МВП, доки не виявлять пробуксовку зчеплення;
стадію, на якій визначають задаваний тиск у точці, в якій виявляють пробуксовку;
стадію, на якій розраховують еквівалентну потужність двигуна, яку витрачають на додатковий пристрій, по задаваному тиску при пробуксовці для визначення пропорції сигналу навантаження двигуна, яку витрачають на додатковий пристрій, у порівнянні до ведучих коліс.
2. Спосіб визначення додаткового навантаження на двигун за п. 1, який включає також стадію, на якій після виявлення пробуксовки тиск зчеплення МВП знов збільшують, щоб мінімізувати пробуксовку зчеплення.
Текст
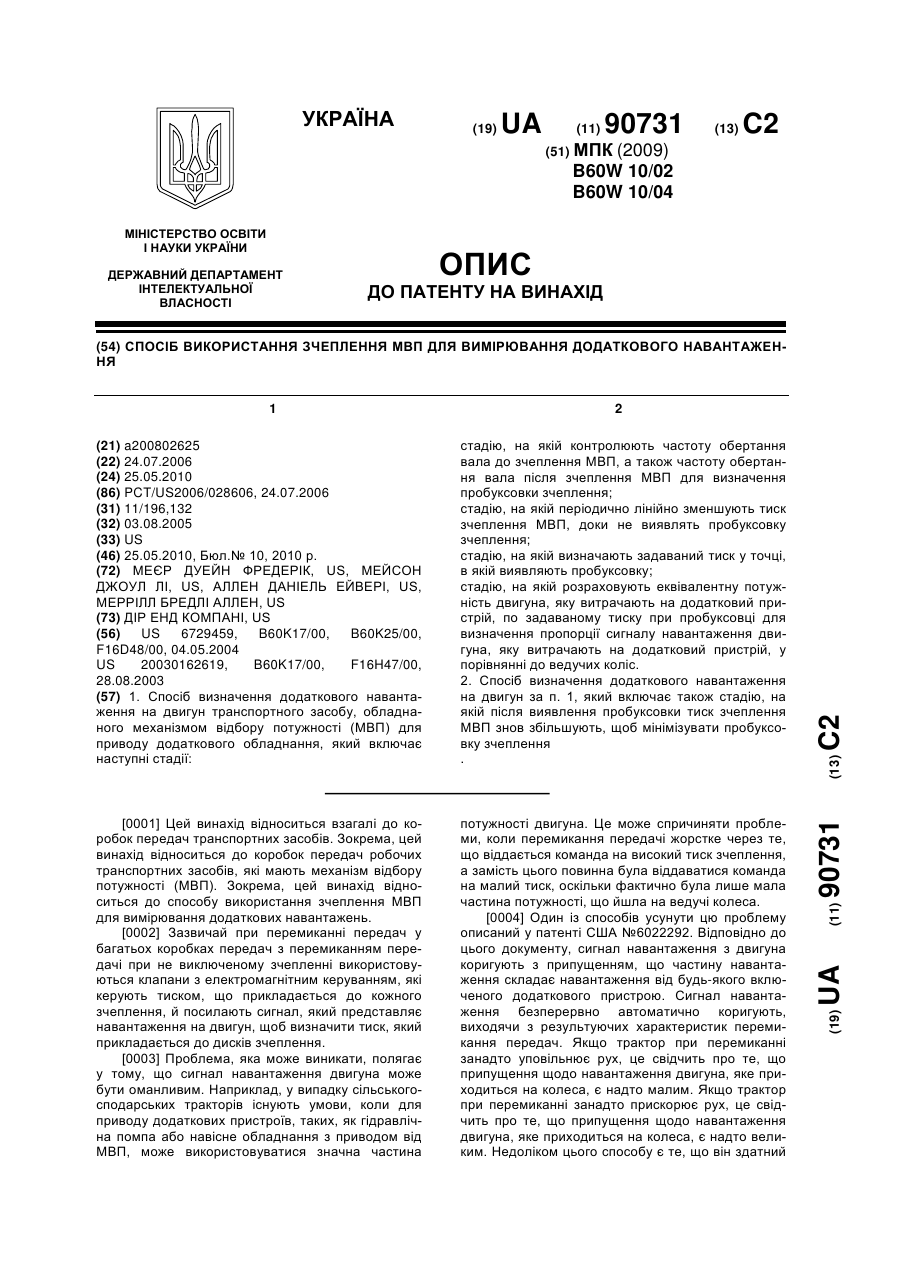
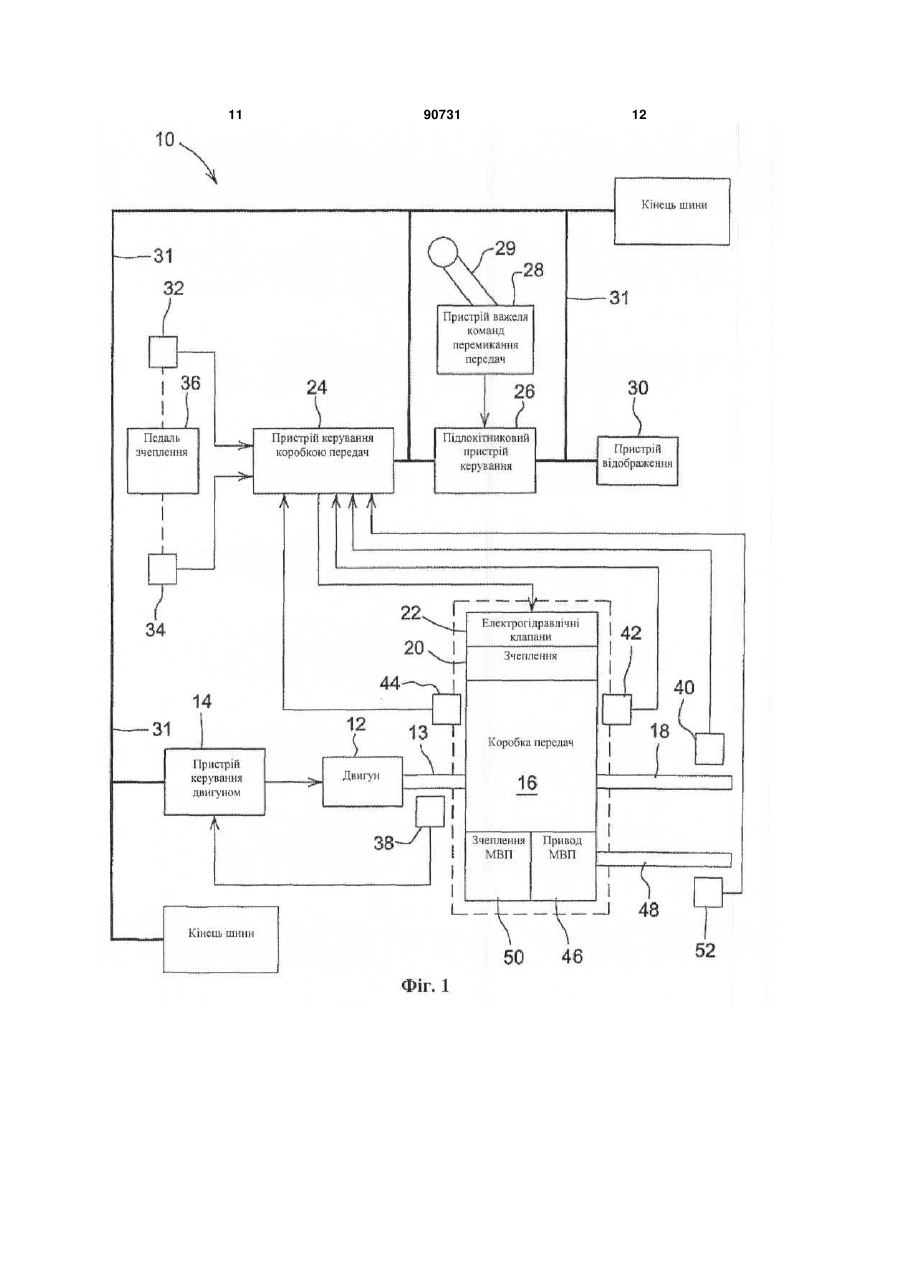
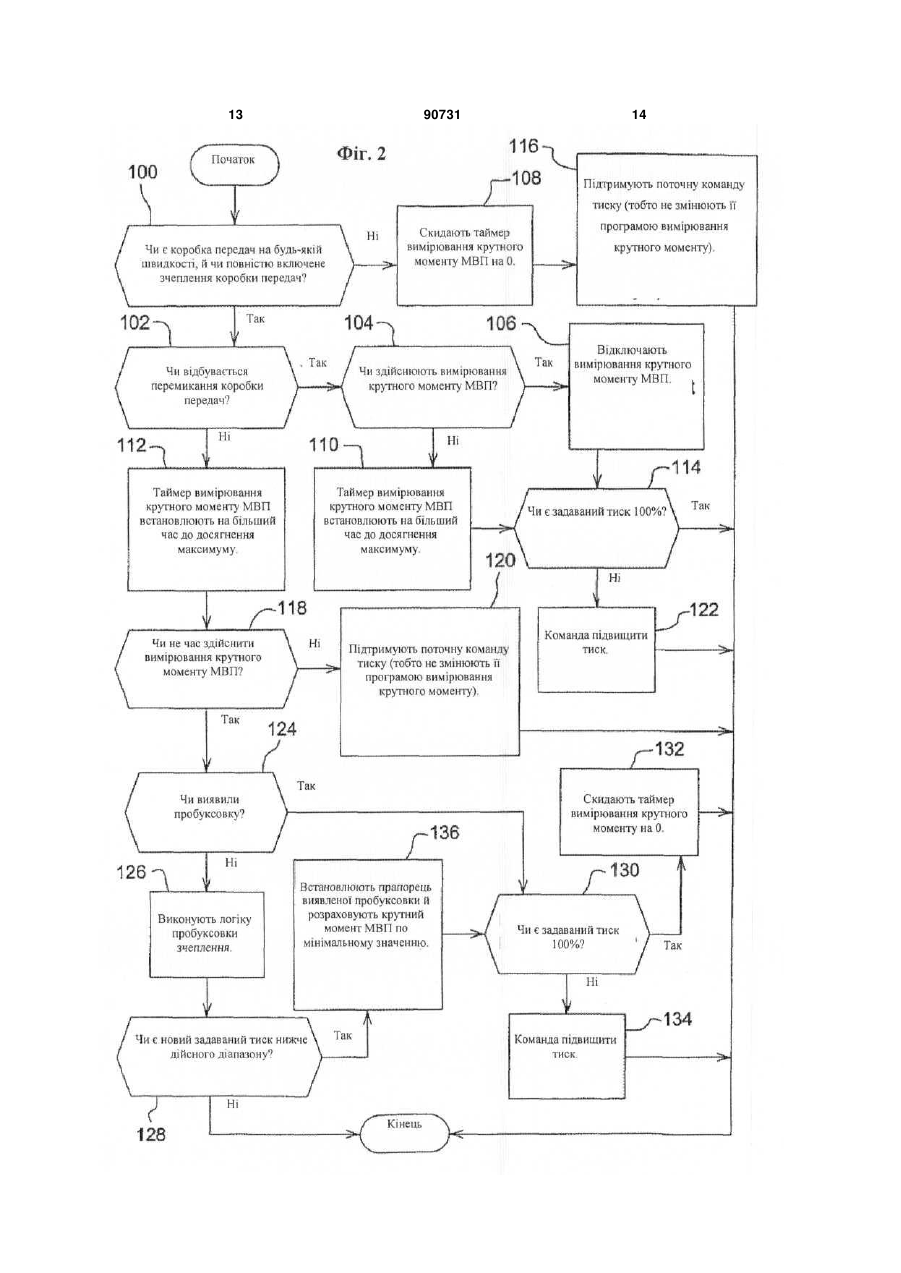
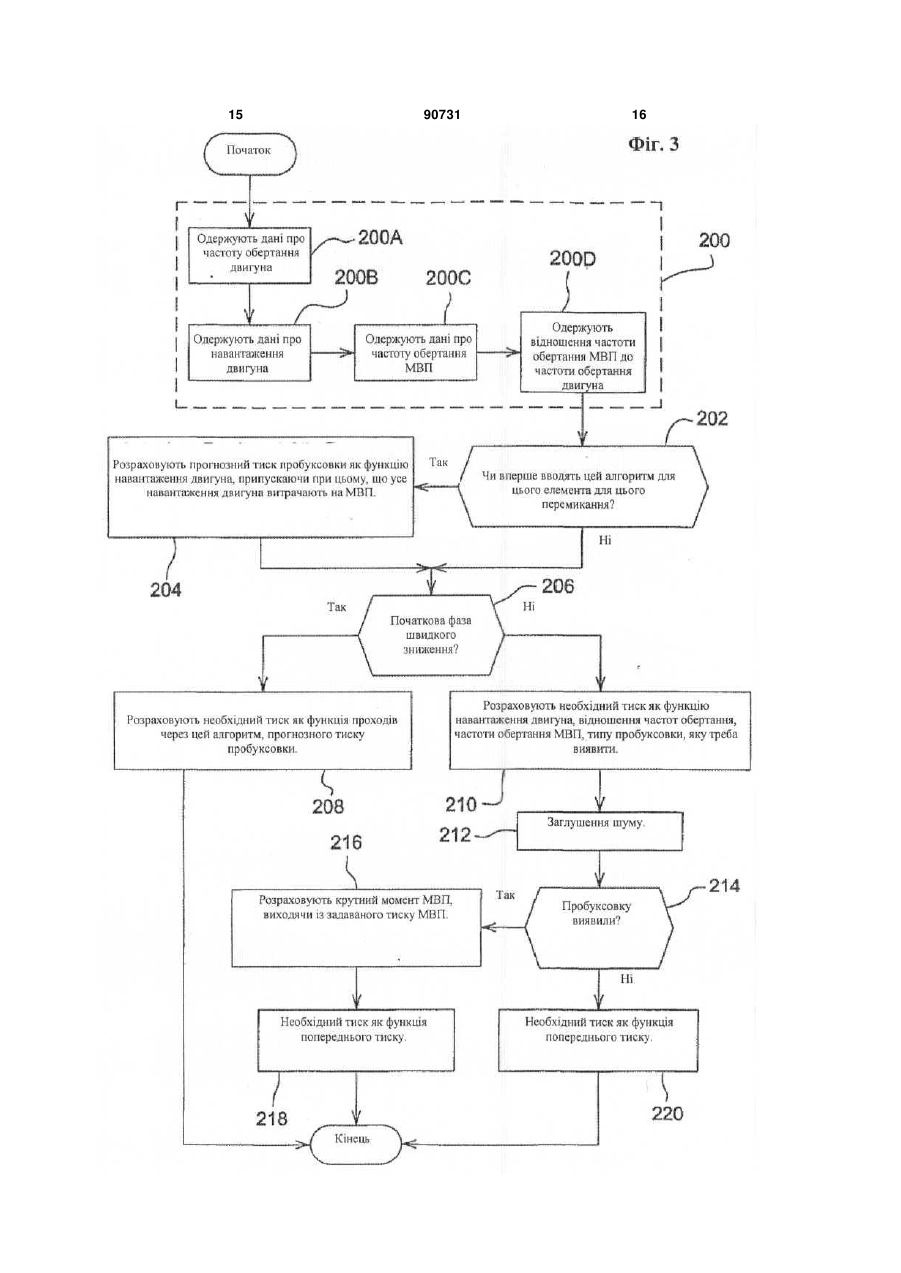
1. Спосіб визначення додаткового навантаження на двигун транспортного засобу, обладнаного механізмом відбору потужності (МВП) для приводу додаткового обладнання, який включає наступні стадії: C2 2 (19) 1 3 90731 4 лише реагувати на погане перемикання передач. якому відбулася пробуксовка, розраховують еквіВін не запобігає поганому перемиканню у першу валентну потужність двигуна, яка витрачається на чергу. додатковий пристрій. Маючи цю інформацію, ви[0005] Ще одна проблема полягає у тому, що значають пропорцію сигналу навантаження двигутрансмісії транспортних засобів повинні розробляна, яка витрачається на додатковий пристрій, відтися на максимальну потужність двигуна. Однак у носно ведучих коліс. Після виявлення пробуксовки деяких випадках певна частина потужності двигуна зчеплення МВП, тиск зчеплення знов збільшують, витрачається на додаткові пристрої, такі, як навісщоб мінімізувати пробуксовку. не обладнання з приводом від МВП або гідравлічні [0012] Основна відмінність між цим способом і помпи. У цих випадках може виявитися потрібним способом, описаним у патенті США №6729459, підвищити потужність двигуна, оскільки обмежуваполягає у тому, що тиск зчеплення МВП лише пельний фактор (трансмісія) не навантажується до ріодично знижують до точки, у якій він пробуксойого можливостей. вує, замість зниження до точки, у якій він пробук[0006] Один із способів визначення потужності, совував би безперервно. Перевага при цьому яка витрачається на навісне обладнання з привополягає у тому, що зменшують втрату потужності, дом від МВП, описаний у патенті США №6729459. яка є результатом безперервної пробуксовки зчеУ цьому способі тиск зчеплення МВП зменшують і плення. підтримують на рівні, на якому забезпечують пос[0013] Для ознайомлення фахівців у галузі тетійну малу пробуксовку зчеплення. Знаючи задахніки, найближчої до цього винаходу, далі з посиваний тиск, який спричинив пробуксовку, можна ланнями на додані креслення, які є невід'ємною обчислити частину потужності, що витрачається частиною цього опису, описується переважний через зчеплення МВП. Окрім забезпечення виміваріант здійснення винаходу, який ілюструє крарювання крутного моменту, цей спосіб забезпечує щий варіант практичного здійснення винаходу. також спосіб захисту трансмісії МВП від ударного Примірний варіант здійснення описується докладнавантаження. Основним недоліком цієї системи є но без спроби показати усі різні форми й варіанти, втрата потужності, притаманна через безперервну у яких винахід може бути втілений. Тому варіант пробуксовку зчеплення. здійснення, показаний і описаний у цьому докуме[0007] Отже, у даній галузі техніки існує очевинті, є ілюстративним і, як стане очевидним фахівдна потреба у способі визначення частини наванцям у цій галузі техніки, може бути зміненим чистаження двигуна, що приходиться на додатковий ленними шляхами у межах обсягу й сутності пристрій, щоб запобігти вищезазначеним проблевинаходу, визначених доданою формулою винамам. ходу, а не подробицями опису. [0008] 3 огляду на вищезазначене, метою виСтислий опис графічного матеріалу находу є створення способу визначення додатко[0014] Для повного розуміння цілей, способів і вого навантаження на двигун. конструкції винаходу, далі наводиться його докла[0009] Ще однією метою винаходу є створення дний опис із посиланнями на додані креслення, на способу, сумісного з відомими системами трансміяких: сії і методами роботи. [0015] Фіг.1 представляє собою схематичну [0010] Вищезазначені та інші цілі винаходу раблок-схему пропонованої системи керування козом із їх перевагами над відомими технічними ріробкою передач; шеннями, які стануть очевидними з подальшого [0016] Фіг.2 представляє собою логічну блокдокладного опису, досягаються завдяки способу схему, яка ілюструє алгоритм, який виконують визначення додаткового навантаження на двигун пристроєм керування коробкою передач, показатранспортного засобу, обладнаного механізмом ним на Фіг.1; відбору потужності (МВП) для приводу додатково[0017] Фіг.3 представляє собою логічну блокго пристрою, який включає наступні стадії: стадію, схему, яка ілюструє алгоритм, представлений крона якій контролюють частоту обертання вала до ком 126 на Фіг.2. зчеплення МВП, а також частоту обертання вала Опис переважного варіанту здійснення після зчеплення МВП для визначення пробуксовки [0018] Звернемося тепер до креслень і, зокрезчеплення; стадію, на якій періодично лінійно змема, до Фіг.1. Загальною позицією 10 позначена ншують тиск зчеплення МВП, доки не виявлять система керування коробкою передач на базі мікпробуксовку зчеплення; стадію, на якій визначають ропроцесора, до якої застосовується цей винахід. задаваний тиск у точці, в якій відбулася пробуксоСиловий механізм транспортного засобу включає вка; стадію, на якій розраховують еквівалентну двигун 12, яким керують за допомогою електронпотужність двигуна, яка витрачається на додатконого пристрою 14 керування двигуном, і яким привий пристрій, по задаваному тиску при пробуксовводять коробку передач з перемиканням передач ці, для визначення пропорції сигналу навантаженпід навантаженням 16 через вхідний вал 13. Короня двигуна, яку витрачають на додатковий бку передач 16 виконують з проміжним валом (не пристрій, у порівнянні до ведучих коліс. показаним) і вихідним валом 18, який з'єднують з [0011] Зазвичай, якщо додатковий пристрій ведучими колесами (не показаними). Коробку пеприводиться трансмісією МВП, тиск зчеплення редач з перемикання передач під навантаженням МВП періодично лінійно зменшують, доки не вияв16 виконують із групою працюючих під тиском лять пробуксовку зчеплення. Пробуксовку визнаелементів керування або зчеплень 20, якими кечають шляхом контролю частоти обертання вала рують за допомогою відповідної групи пропорційдо муфти, а також частоти обертання вала після них регулюючих клапанів з електромагнітним кемуфти. Шляхом визначення задаваного тиску, при руванням 22. В якості коробки передач 16 можуть 5 90731 6 використовувати коробку передач, описану у патепристрою або навісного обладнання (не показанонті США №5011465, виданому 30 квітня 1991 року го) за допомогою вихідного вала 48 МВП. Привод Джефріз (Jeffries) і співавторам і переуступленому 46 МВП включають через зчеплення 50 МВП. Часправонаступнику цієї заявки. В якості клапанів 22 тоту обертання вихідного вала 48 МВП вимірюють можуть використовувати двокаскадні електрогідза допомогою датчика 52 частоти обертання МВП, равлічні клапани, описані у патенті США який сполучають із пристроєм керування 24 короб№4741364, виданому 3 травні 1988 року Штоссу кою передач. (Stoss) і співавторам і переуступленому правона[0023] Пристрій керування 24 коробкою переступнику цієї заявки. дач виконують з мікропроцесором, що серійно ви[0019] Коробкою передач з перемиканням пепускається, за допомогою якого посилають сигнаредач під навантаженням 16 керують за допомоли керування до групи задавальних пристроїв гою пристрою керування 24 коробкою передач, клапанів (не показаних), якими в клапани 22 видапідлокітникового пристрою керування 26, за допоють сигнали керування змінним робочим циклом могою якого приймають й інтерпретують команди широтно-імпульсно-модульованої напруги. Приважеля перемикання передач з пристрою 28 вастроєм керування 24 коробкою передач видають желя команд перемикання передач. Пристрій 28 сигнали керування залежно від різних виміряних важеля команд перемикання передач переважно або визначених водієм вхідних сигналів, щоб досявиконують як звичайний пристрій важеля команд гти необхідного тиску в зчепленнях і, таким чином, перемикання передач, який використовують на керувати перемиканням коробки передач 16 бажатракторах виробництва компанії John Deere, з ваним способом. желем перемикання передач 29. Цей пристрій ва[0024] Пристроєм керування 24 коробкою пежеля команд перемикання передач описаний у редач виконують алгоритм основного циклу відопатенті США №5406860, виданому 18 квітня 1995 мої розробки (не показаний), за допомогою якого року Істон (Easton) і співавторам і переуступленокерують змінними у часі гідравлічними тисками, які му правонаступнику цієї заявки. Інформацію стоприкладають до різних елементів зчеплення коросовно системи 10 можуть відображати на пристрої бки передач. Відповідно до цього винаходу, цим відображення 30. Пристрій керування 24 коробкою пристроєм виконують також алгоритм, представпередач і підлокітниковий пристрій керування 26 лений на Фіг.2 й 3. Фахівцеві у цій галузі техніки переважно виконують як електронні пристрої керубуде очевидним перетворення блок-схем на Фіг.2 вання на базі мікропроцесорів. й 3 у стандартну мову для реалізації описаного [0020] Ручного керування досягають за допоблок-схемою алгоритму у цифровій обчислювальмогою керованого водієм пристрою 28 важеля коній машині або мікропроцесорі. манд перемикання передач. Пристроєм 28 до під[0025] Фіг.2 ілюструє, як пропонований спосіб локітникового пристрою керування 26 видають здійснюють у системі керування на базі мікропросигнали, якими представляють положення важеля цесора. Послідовність від „Початку" до „Кінця" на 29. За допомогою підлокітникового пристрою керуФіг.2 здійснюють операційною системою в реальвання 26 до пристрою керування 24 коробкою пеному масштабі часу типу диспетчера задач у певредач через комунікаційну шину 31 транспортного ному періодичному інтервалі у пристрої керування засобу посилають інформацію про команди перекоробкою передач. Нормальна стратегія включенмикання. ня МВП до обсягу винаходу не входить. На почат[0021] За допомогою датчиків 32 включення ку цього алгоритму припускають, що МВП включезчеплення й датчиків 34 виключення зчеплення ний і повністю зачеплений. Якщо МВП не видають сигнали, якими представляють положенвключений і повністю не зачеплений, пропоновані ня педалі зчеплення 36. Пристроєм 14 керування алгоритми не виконують. Результатом цієї логіки у двигуном одержують сигнали з датчика 38 частоти „Кінці" є задаваний тиск МВП у кПа. Подальші прообертання двигуна, а також з інших датчиків (не цеси прикладання цього задаваного тиску електпоказаних), що уможливлює передачу пристроєм ронним шляхом до зчеплення МВП за допомогою керування двигуна інформації про навантаження електрогідравлічного клапана МВП й інші фактори, двигуна через комунікаційну шину 31 транспортноякі можуть справити вплив на остаточний задаваго засобу. Пристроєм керування 24 коробкою пений тиск, не входять до обсягу винаходу. редач одержують сигнали від датчика 40 частоти [0026] На Фіг.2 позицією 100 позначений перобертання вісі, датчика 42 частоти обертання ший крок процесу вимірювання крутного моменту проміжного вала, за допомогою якого вимірюють МВП, на якому визначають, чи повністю включене частоту обертання проміжного вала всередині зчеплення коробки передач і чи є коробка передач коробки передач 16, і датчика 44 температури мана будь-якій швидкості. Якщо МВП цьому критерію стила коробки передач. Пристроєм керування 24 не відповідає, вимірювання крутного моменту МВП коробкою передач інформацію про швидкість коліс відключать шляхом скидання таймера вимірюван(яку розраховують по частоті обертання вісі й діаня крутного моменту МВП на кроці 108 (далі за метру шини) й інформацію про температуру мастекстом іменованого просто „таймером"); на кроці тила через комунікаційну шину 31 транспортного 116 задаваний тиск залишать незмінним. Потім засобу посилають на пристрій відображення 30. таймером забезпечують початкову затримку часу Інформацію про частоту обертання проміжного до першого вимірювання крутного моменту у вивала використовують лише в цілях керування, і падку, якщо зчеплення коробки передач зроблять при нормальних робочих умовах не відображають. повністю включеним, і коробку передач повністю [0022] Крім того, коробку передач 16 виконуперемкнуть на будь-яку швидкість. ють з приводом 46 МВП для приводу додаткового 7 90731 8 [0027] На кроці 102 перевіряють другий критедвигуна приходиться на МВП. Рівняння, що ув'язує рій для спроби вимірювання крутного моменту величину крутного моменту, що проходить через МВП, щоб побачити, чи здійснюють перемикання коробу передач, з тиском пробуксовки, є таким: коробки передач. Якщо так, вимірювання крутного [0031] Крутний момент двигуна (Нм) = тиск моменту МВП також не почнуть, і при цьому на пробуксовки (кПа) * m + b кроці 112 таймер просто встановлюють на більший [0032] Похил m і відрізок b, що відсікається на час, а задаваний тиск підтримують на рівні 100%, координатній вісі, знаходять емпірично. Прогнозабо, якщо під час перемикання здійснюють виміний тиск пробуксовки можна визначити за наведерювання крутного моменту МВП, як на кроці 104, ним вище рівнянням, вирішуючи його для тиску то поточне вимірювання крутного моменту відклюпробуксовки. Це рівняння має такий вигляд: чать, як показано на кроці 106, і задаваний тиск на [0033] Прогнозний тиск пробуксовки (кПа) = кроці 122 підвищать назад до повного тиску, якщо (крутний момент двигуна - b)/m під час ініціювання перемикання передачі задава[0034] У цьому алгоритмі емпірично знайдений ний тиск є меншим за 100% повного тиску, як на відрізок b роблять відносним до значення каліброкроці 114. ваного тиску заповнення для елемента МВП шля[0028] Якщо перемикання коробки передач ще хом віднімання добутку каліброваного тиску запоне здійснюють, то таймер на кроці 110 встановвнення й похилу m. Тому рівняння, розроблене з люють на більший й обмежений час і перевіряють, набору експериментальних даних, можна застосочи треба здійснити нове вимірювання крутного вувати до усіх транспортних засобів, до яких замоменту МВП на кроці 118. Якщо ще не час почати стосовний цей винахід. вимірювання крутного моменту МВП, задаваний [0035] При кожному виконанні алгоритму, на тиск не змінюють. Якщо вже час почати вимірюкроці 206 приймають рішення визначити, чи виковання крутного моменту МВП, на кроці 124 перевінують алгоритм на фазі швидкого зниження. Зчепряють пробуксовку зчеплення перед тим, як на лення МВП виконують з лічильником циклів, пов'якроці 126 виконати логіку пробуксовки зчеплення. заним із ним у програмному забезпеченні, за Якщо виявили пробуксовку, то тиск підвищують допомогою якого вказують кількість проходів через назад до 100%, і таймер скидають для наступного функцію пробуксовки зчеплення від початку виміциклу вимірювання. Якщо пробуксовку не виявили, рювання крутного моменту. Рішення, треба чи не то виконують логіку пробуксовки зчеплення. треба за допомогою алгоритму здійснювати фазу [0029] Вихідним сигналом логіки пробуксовки швидкого зниження або перейти до фази поступозчеплення є задаваний тиск, який подають до зчевого зниження, ґрунтують виключно на значенні плення МВП при виконанні алгоритму. Якщо вицього лічильника циклів. Якщо значення лічильниявили пробуксовку, розраховують крутний момент ка циклів менше певного значення, наприклад, 6, МВП як функцію команди тиску, при якій виявили за допомогою алгоритма виконують швидке знипробуксовку. Потім на кроках 130, 134 тиск підвиження тиску на зчеплення. На кроці 208, виходячи щують назад до повного тиску, і таймер скидають з вищезазначеного прогнозного тиску зчеплення, для наступної спроби вимірювання. задають цільовий тиск для програми початкового [0030] Подробиці логіки пробуксовки зчепленшвидкого зниження. Примірне рівняння, яким можня блоку 126 згідно до Фіг.2 далі розглядаються з на користатися для розрахунку задаваного вихідпосиланнями на Фіг.3. На першому кроці 200 у ного тиску на цій фазі швидкого зниження, є таким: логіці пробуксовки зчеплення одержують поточні [0036] Задаваний тиск = Попередній вихідний дані про частоту обертання двигуна (200А), навантиск - (цільова зміна * 2/3) таження двигуна (тобто тормозний момент) (200В), [0037] В вищенаведеному рівнянні „цільова частоту обертання вала МВП (200С) і відношення зміна" - це різниця між попереднім вихідним тисчастоти обертання МВП до частоти обертання ком і вищезазначеним прогнозним тиском пробукдвигуна (200D). Якщо на кроці 202 здійснюють совки, причому попередній вихідний тиск ініціаліперший прохід через програму для елемента зчезують до повного тиску системи. Іншим підходом плення, то на кроці 204 розраховують прогнозний могло б бути ґрунтування вихідного тиску на табтиск пробуксовки, виходячи з навантаження двигулиці відповідності. Прикладом могла б бути настуна, припускаючи при цьому, що усе навантаження пна таблиця: [0038] Вихідний тиск Прогнозний тиск пробуксовки + зміщення Прогнозний тиск пробуксовки + зміщення Прогнозний тиск пробуксовки + зміщення Тиск у системі Тиск у системі Прогнозний й тиск пробуксовки + зміщення [0039] Метою фази швидкого зниження є швидко знизити тиск на зчепленні МВП до рівня, трохи вищого за тиск, при якому сигнал навантаження двигуна вказує, що елемент зчеплення зараз почне пробуксовувати, якщо усе навантаження двигуна приходиться на МВП. Цей спосіб використову Лічильник циклів 1 2 3 4 5 6 ють лише для того, щоб мінімізувати загальну тривалість виконання алгоритму. Профіль команди тиску під час фази швидкого зниження визначають емпірично для мінімізації провалу тиску. [0040] Після досягнення цього тиску, алгоритм на кроці 210 переводять до фази поступового зни 9 90731 10 ження тиску. Під час цієї фази команду тиску поспроцесів, які можуть виграти з нього, наприклад, тупово знижують на фіксовану величину кожного для алгоритмів перемикання коробки передач. разу протягом програми, наприклад, на 2кПа, і при Крім того, у програмі передбачають прапорець, цьому за допомогою програми намагаються вияким вказують, що пробуксовку виявили, і що круявити пробуксовку у зчепленні МВП. Пробуксовку тний момент розрахували. Цей прапорець викоривизначають як відносний рух між дисками зчепстовують у породжувальних (батьківських) процелення МВП. Коефіцієнт ковзання розраховують за сах для того, щоб ефективно узяти назад формулою: керування задаваним тиском (тобто для того, щоб [0041] Коефіцієнт ковзання = (Частота оберзнати, коли підвищувати назад тиск на зчеплення тання вала МВП * передавальне число МВП) / чаМВП), як у випадку доріжки „Так" блока 124 на стота обертання двигуна Фіг.2. [0042] У цьому алгоритмі коефіцієнт ковзання [0046] Подальшим процесом, який завжди розраховують з точністю до 0,1%.здійснюють після логіки пробуксовки зчеплення, є [0043] На кроці 212 коефіцієнт ковзання пропумежова перевірка при задаваному тиску, який є скають через алгоритм заглушення шуму, який виходом логіки пробуксовки зчеплення. Якщо завиконуються з N/(N+1) цифровим усереднювальдаваний тиск знижують до мінімального значення ним фільтром і додатковою логікою. Фактичну без виявлення пробуксовки зчеплення, то поропробуксовку розраховують по відфільтрованому джувальним процесом, описаним на Фіг.2, на кроці значенню коефіцієнта ковзання. У випадку вияв136 встановлюють прапорець виявленої пробуксолення негативної пробуксовки значення коефіцієнвки й розраховують крутний момент МВП по цьому та ковзання 0,980 відповідатиме фактичній пробумінімальному значенню тиску. Потім тиск підвиксовці 2,0%. У випадку виявлення позитивної щать назад до 100% і т.д.. пробуксовки значення коефіцієнта ковзання 1,020 [0047] Фахівцям у цій галузі техніки тепер ясно, відповідатиме фактичній пробуксовці 2,0%. До як, знаючи, скільки потужності двигуна витрачають додаткової логіки включають перевірку напрямку на трансмісію і скільки на додаткові навантаження, пробуксовки (позитивне або негативне) й порівможна підвищити якість перемикання коробки пеняння результату поточного вимірювання пробукредач з перемиканням швидкостей під навантасовки із значенням з попереднього проходу через женням в умовах додаткового навантаження, наалгоритм. На кроці 214 здійснюють виявлення дійприклад, навісного обладнання з приводом від сної пробуксовки, якщо поточна пробуксовка є біМВП. Крім того, тиск на зчеплення коробки перельшою за величиною, ніж попереднє значення дач, який прикладають при перемиканні передач, пробуксовки у тому самому напрямку, і більше, ніж можна підбирати з огляду лише на потужність двипевне граничне значення. Крім того, у пам'ять когуна, яку витрачають на ведучі колеса. Крім того, жного елемента зчеплення поміщають параметр потужність двигуна можна підвищити без шкоди керування, який призначають для того, щоб задаресурсу трансмісії (коли частину потужності двигувати, скільки цих подій дійсної пробуксовки необна витрачають на додаткове навантаження). хідно побачити до того, як виявлять пробуксовку. [0048] Отже, можна бачити, що представлене Встановлено, що на практиці для зчеплення МВП вище рішення дозволяє досягти цілей винаходу. чинні наступні параметри: Хоча відповідно до патентного законодавства ви[0044] ще представлений і докладно описаний лише пеN=3 реважний варіант здійснення винаходу, цей опис Необхідні події дійсної пробуксовки = 1 не призначений бути вичерпним або обмежувати Граничне значення виявлення винахід розкритим точним видом. У світлі вищезапробуксовки =2.0% значених ідей є можливими очевидні модифікації [0045] Для вимірювання крутного моменту або варіанти. Цей варіант здійснення було вибраМВП бажаним варіантом виявлення є негативна но й описано, щоб надати найкращу ілюстрацію пробуксовка. Якщо на кроці 214 пробуксовку не принципів винаходу і його практичного застосувиявляють, то від попередньої команди тиску відвання і таким чином дозволити фахівцеві у цій німають фіксоване значення тиску, і на кроці 218 галузі використовувати винахід у різних варіантах і це стає новим необхідним тиском. Якщо ж на кроці з різними модифікаціями, підходящими для намі214 пробуксовку виявлено, тоді на кроці 216 коченого конкретного використання. Усі ці модифікаманду тиску оброблюють назад за вищенаведеним ції і варіанти знаходяться у межах обсягу винахорівнянням і одержують розрахунковий крутний ду, визначеного доданою формулою винаходу, момент МВП, і на кроці 220 команду тиску залипри їх тлумаченні відповідно до обсягу, на який шають незмінною. Цей розрахунковий крутний вони справедливо й законно мають право. момент потім залишають у програмі для інших 11 90731 12 13 90731 14 15 90731 16 17 Комп’ютерна верстка В. Мацело 90731 Підписне 18 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of use of pto clutch for measuring additional load
Автори англійськоюMeyer Doyen Frederick, Mason Jole Lee, Allen Daniel Ivery, Merrill Bradley Allen
Назва патенту російськоюСпособ использования сцепления мом для измерения дополнительной нагрузки
Автори російськоюМеер Дуейн Фредерик, Мейсон Джоул Ли, Аллен Даниэль Эйвери, Меррилл Бредли Аллен
МПК / Мітки
МПК: B60W 10/02, B60W 10/04
Мітки: навантаження, зчеплення, мвп, використання, додаткового, спосіб, вимірювання
Код посилання
<a href="https://ua.patents.su/9-90731-sposib-vikoristannya-zcheplennya-mvp-dlya-vimiryuvannya-dodatkovogo-navantazhennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб використання зчеплення мвп для вимірювання додаткового навантаження</a>
Спосіб підключення додаткового генератора до загального навантаження
Номер патенту: 30383
Опубліковано: 25.02.2008
Автори: Петренко Лев Петрович, Ушкаренко Олександр Олегович, Рябенький Володимир Михайлович, До Ань Туан
МПК: H02M 1/08
Мітки: додаткового, генератора, загального, спосіб, підключення, навантаження
Формула / Реферат:
Cпосіб підключення додаткового генератора до загального навантаження, що включає формування імпульсних сигналів за допомогою відповідних оптоелектронних датчиків ротора первинних двигунів, які пропорційні періоду обертання основного і додаткового генераторів, при цьому з цих сигналів за допомогою пристроїв керування у вигляді мікропроцесорного блока формують поточні синхронізуючі керуючі сигнали, якими впливають на відповідний кроковий...
Спосіб підключення додаткового генератора до загального навантаження
Номер патенту: 28497
Опубліковано: 10.12.2007
Автори: До Ань Туан, Петренко Лев Петрович, Рябенький Володимир Михайлович, Ушкаренко Олександр Олегович
МПК: H02M 1/08
Мітки: навантаження, загального, додаткового, генератора, спосіб, підключення
Формула / Реферат:
Спосіб підключення додаткового генератора до загального навантаження, котрий включає формування імпульсних сигналів за допомогою відповідних оптоелектронних датчиків ротора первинних двигунів, які пропорційні періоду обертання основного і додаткового генераторів, при цьому з цих сигналів, за допомогою пристроїв керування у вигляді мікропроцесорного блока, формують поточні синхронізуючі керуючі сигнали, якими впливають на відповідний кроковий...
Пристрій підключення додаткового генератора до загального навантаження
Номер патенту: 28499
Опубліковано: 10.12.2007
Автори: Ушкаренко Олександр Олегович, До Ань Туан, Рябенький Володимир Михайлович, Петренко Лев Петрович
МПК: H02M 1/08
Мітки: навантаження, загального, додаткового, підключення, пристрій, генератора
Формула / Реферат:
Пристрій підключення додаткового генератора до загального навантаження, що вміщує основний і додатковий генератори, котрі через відповідні вимикачі підключені за допомогою загальної електричної мережі до загального навантаження, при цьому основний і додатковий генератори за допомогою загальних осей зв'язані з відповідними роторами первинних двигунів, а їхні диски з N пазами функціонально зв'язані з відповідними оптоелектронними датчиками,...
Спосіб вимірювання міцності зчеплення покриття з основою
Номер патенту: 70361
Опубліковано: 15.10.2004
Автори: Шательє Жан-Ів, Рамахефасоло Даніель Себаст'єн
МПК: G01N 29/00, G01N 19/00, G01N 29/11, G01N 29/22
Мітки: зчеплення, вимірювання, міцності, спосіб, покриття, основою
Формула / Реферат:
1. Спосіб вимірювання міцності зчеплення покриття (3) з основою (2), який відрізняється тим, що на основу і на покриття спрямовують ультразвук, приймають серію ехо-сигналів, що виникають у результаті відбиття ультразвуку від торцевих поверхонь основи і поверхні поділу між основою і покриттям, визначають величину коефіцієнта (х) ослаблення ехо-сигналу, що характеризує згасання амплітуди ехо-сигналу залежно від числа відбитків ехо-сигналу, і...
Пристрій підключення основного і додаткового генераторів до загального навантаження і розподілу активної потужності між ними
Номер патенту: 42829
Опубліковано: 27.07.2009
Автори: Петренко Лев Петрович, Рябенький Володимир Михайлович, Ключко Артем Сергійович, Ушкаренко Олександр Олегович
МПК: H02M 1/08
Мітки: додаткового, ними, підключення, загального, розподілу, пристрій, навантаження, основного, генераторів, активної, потужності
Формула / Реферат:
Пристрій підключення основного і додаткового генераторів до загального навантаження і розподілу активної потужності між ними, який містить основний і додатковий генератори, виходи яких за допомогою вимикачів підключені до шин загального навантаження, при цьому кожен з генераторів функціонально зв'язаний віссю з первинним двигуном відповідно з індивідуальною уставкою для зміни потужності основного і додаткового генераторів, на осях обертання...
Попередній патент: Комбінація фунгіцидно активних речовин, застосування її для боротьби з небажаними фітопатогенними грибками та для обробки насіння
Наступний патент: Спосіб одержання цукрових сиропів і аналогів цукатів
Випадковий патент: Зарядний пристрій