Спосіб керування автономним асинхронним генератором з короткозамкненим ротором
Номер патенту: 93219
Опубліковано: 25.09.2014
Автори: Бондаренко Юлія Олегівна, Бялобржеський Олексій Володимирович, Миколаєнко Юлія Олександрівна
Формула / Реферат
Спосіб керування автономним асинхронним генератором з короткозамкненим ротором, при якому привідний механізм розкручує ротор асинхронного генератора, швидкість обертання ротора контролюється датчиком швидкості, електричну енергію асинхронного генератора передають на генераторний перетворювач, контролюють струми фаз генератора, передають енергію з генераторного перетворювача на конденсатор, контролюють напругу конденсатора, який відрізняється тим, що максимальну величину швидкості обмежують на заданому рівні кутової швидкості, розраховують механічний момент, виконують пряме перетворення Парка, задають потокозчеплення ротора, розраховують задану пряму проекцію вектора струму генератора, струм намагнічення, задану ортогональну проекцію вектора струму генератора, поточне положення ротору, виконують зворотне перетворення Парка заданих струмів, розраховують різницю поточного струму та заданого стуму для відповідних фаз генератора, визначають рівень вихідної напруги керування транзисторами верхнього та нижнього плеча генераторного перетворювача, керують генераторним перетворювачем, розраховують різницю поточної напруги конденсатора і заданої напруги конденсатора, корегують сигнал помилки, визначають ортогональну пряму проекцію струму мережевого перетворювача, контролюють струм та напругу мережі, виконують пряме перетворення Парка для струму та напруги, визначають задані проекції напруги мережевого перетворювача, виконують зворотне перетворення Парка заданої напруги, розраховують опірну напругу, визначають рівень вихідної напруги керування транзисторами мережевого перетворювача по фазам, керують мережевим перетворювачем, передають енергію з мережевого перетворювача до трифазної електричної мережі змінного струму.
Текст
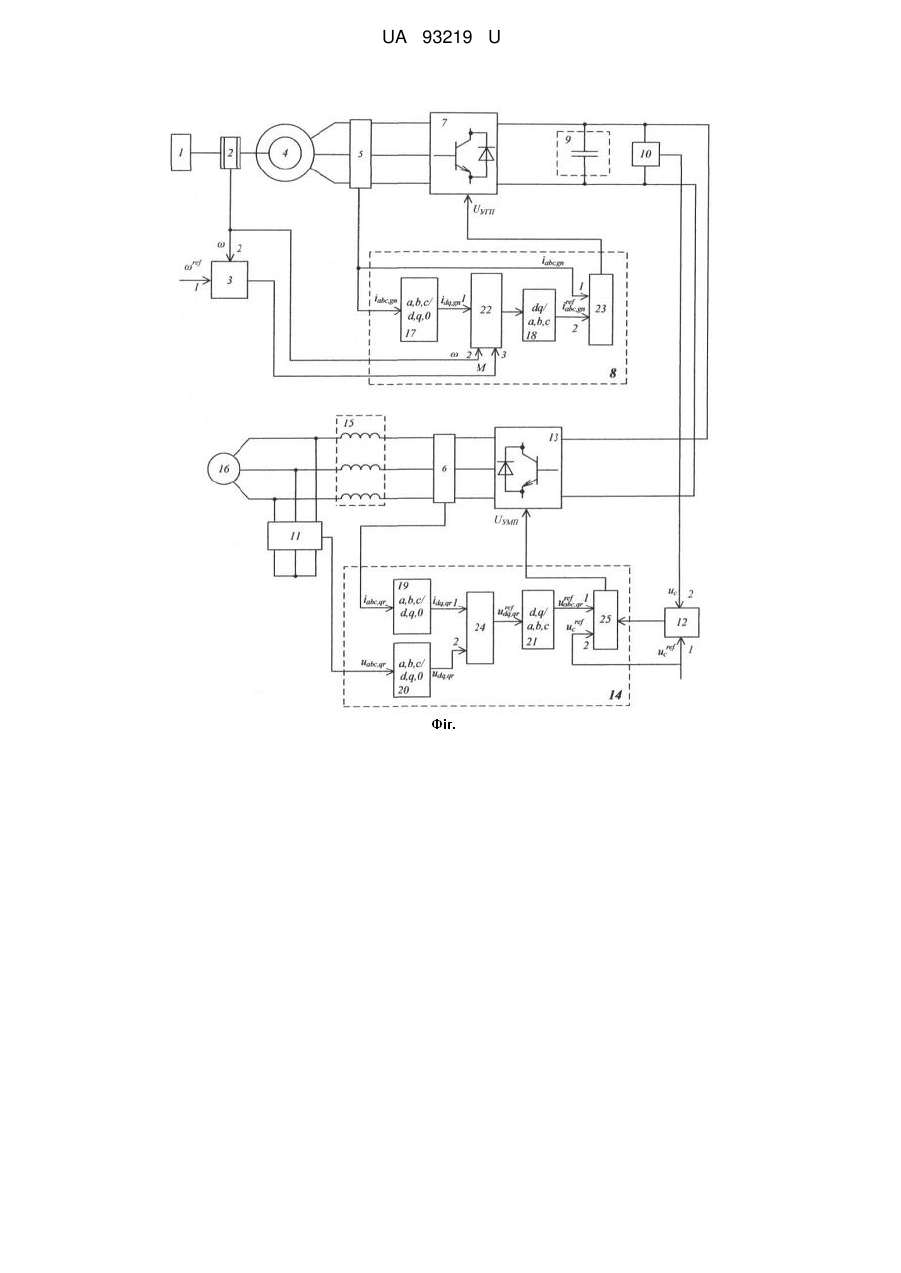
Реферат: Спосіб керування автономним асинхронним генератором з короткозамкненим ротором, при якому привідний механізм розкручує ротор асинхронного генератора, швидкість обертання ротора контролюється датчиком швидкості, електричну енергію асинхронного генератора передають на генераторний перетворювач, контролюють струми фаз генератора, передають енергію з генераторного перетворювача на конденсатор, контролюють напругу конденсатора. Максимальну величину швидкості обмежують на заданому рівні кутової швидкості, розраховують механічний момент, виконують пряме перетворення Парка, задають потокозчеплення ротора, розраховують задану пряму проекцію вектора струму генератора, струм намагнічення, задану ортогональну проекцію вектора струму генератора, поточне положення ротору, виконують зворотне перетворення Парка заданих струмів, розраховують різницю поточного струму та заданого стуму для відповідних фаз генератора, визначають рівень вихідної напруги керування транзисторами верхнього та нижнього плеча генераторного перетворювача, керують генераторним перетворювачем, розраховують різницю поточної напруги конденсатора і заданої напруги конденсатора, корегують сигнал помилки, визначають ортогональну пряму проекцію струму мережевого перетворювача, контролюють струм та напругу мережі, виконують пряме перетворення Парка для струму та напруги, визначають задані проекції напруги мережевого перетворювача, виконують зворотне перетворення Парка заданої напруги, розраховують опірну напругу, визначають рівень вихідної напруги керування транзисторами мережевого перетворювача по фазам, керують мережевим перетворювачем, передають енергію з мережевого перетворювача до трифазної електричної мережі змінного струму. UA 93219 U (54) СПОСІБ КЕРУВАННЯ АВТОНОМНИМ АСИНХРОННИМ ГЕНЕРАТОРОМ З КОРОТКОЗАМКНЕНИМ РОТОРОМ UA 93219 U UA 93219 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель стосується способів керування асинхронними генераторами з вентильним збудженням та може бути використана при створенні регульованих джерел електричної енергії. Відоме технічне рішення (Спосіб керування при провалі мережної напруги асинхронним електроприводом з трифазним автономним інвертором пат. України 55778 МПК Н02Р21/00. Опубл. 27.12.2010 Бюл. № 24, 2010 р. Волков О.В., Косенко І.О.), спосіб керування при провалі мережної напруги асинхронним електроприводом з трифазним автономним інвертором, при якому контролюють фазні мережні напруги, фазні статорні струми і напруги двигуна, визначають через фазні статорні струми і напруги двигуна модулі узагальнених векторів електрорушійної сили і потокозчеплення двигуна, а через фазні мережні напруги визначають модуль вектора мережної напруги, порівнюють модуль вектора мережної напруги з його установленням і модулем вектора електрорушійної сили двигуна, при перевищенні модулем узагальненого вектора мережної напруги його установлення формують необхідні задані значення модуля вектора потокозчеплення, намагнічуючої й активної проекцій вектора статорного струму двигуна, на рівні яких регулюють фактичні значення модуля вектора потокозчеплення і зазначених проекцій вектора статорного струму двигуна, визначають провал мережної напруги при зменшенні модуля вектора мережної напруги нижче рівня його установлення, при провалі мережної напруги обнуляють задане значення активної проекції вектора статорного струму двигуна, порівнюють модуль вектора потокозчеплення двигуна з його заданим значенням, визначають відновлення мережної напруги при збільшенні модуля вектора мережної напруги вище рівня його установлення, при відновленні мережної напруги подають відмикаючі імпульси керування на силові ключі інвертора відповідно до штатного режиму його роботи, а при досягненні модулем вектора потокозчеплення двигуна його заданого значення формують необхідне завдання для активної проекції вектора статорного струму, контролюють струм на виході випрямляча, при провалі мережної напруги і при перевищенні модулем вектора мережної напруги значення модуля вектора електрорушійної сили двигуна регулюють фактичні значення модуля вектора потокозчеплення і намагнічуючої проекції вектора статорного струму двигуна на рівні їх заданих значень, при провалі мережної напруги після зниження модуля вектора мережної напруги менше значення модуля вектора електрорушійної сили двигуна формують відмикаючі імпульси керування для двох силових ключів в одній із фаз випрямляча, а при зменшенні вихідного струму випрямляча до нульового значення знімають відмикаючі імпульси керування з силових ключів інвертора і випрямляча. Спільними ознаками аналога та корисної моделі, що заявляється, є: спосіб керування при провалі мережної напруги асинхронною машиною з трифазним автономним інвертором, при якому контролюють фазні мережні напруги, фазні статорні струми узагальнених векторів електрорушійної сили і потокозчеплення двигуна, а через фазні мережні напруги визначають модуль вектора мережної напруги, порівнюють модуль вектора мережної напруги з його установленням і модулем вектора електрорушійної сили двигуна, при перевищенні модулем узагальненого вектора мережної напруги його установлення формують необхідні задані значення модуля вектора потокозчеплення, намагнічуючої й активної проекцій вектора статорного струму двигуна, на рівні яких регулюють фактичні значення модуля вектора потокозчеплення і зазначених проекцій вектора статорного струму двигуна, визначають провал мережної напруги при зменшенні модуля вектора мережної напруги нижче рівня його установлення, при провалі мережної напруги обнуляють задане значення активної проекції вектора статорного струму двигуна, порівнюють модуль вектора потокозчеплення двигуна з його заданим значенням, визначають відновлення мережної напруги при збільшенні модуля вектора мережної напруги вище рівня його установлення, при відновленні мережної напруги подають відмикаючі імпульси керування на силові ключі інвертора відповідно до штатного режиму його роботи, а при досягненні модулем вектора потокозчеплення двигуна його заданого значення формують необхідне завдання для активної проекції вектора статорного струму, контролюють струм на виході випрямляча, при провалі мережної напруги і при перевищенні модулем вектора мережної напруги значення модуля вектора електрорушійної сили двигуна регулюють фактичні значення модуля вектора потокозчеплення і намагнічуючої проекції вектора статорного струму двигуна на рівні їх заданих значень, при провалі мережної напруги після зниження модуля вектора мережної напруги менше значення модуля вектора електрорушійної сили двигуна формують відмикаючі імпульси керування для двох силових ключів в одній із фаз випрямляча, а при зменшенні вихідного струму випрямляча до нульового значення знімають відмикаючі імпульси керування з силових ключів інвертора і випрямляча. Недоліками даного технічного рішення є: відсутність передачі електричної енергії до мережі; відсутність можливості формування заданого мережевого струму для підтримання напруги мережі на заданому рівні. 1 UA 93219 U 5 10 15 20 25 30 35 40 45 50 55 60 Відоме технічне рішення (Частотно-регулюючий асинхронний електропривід пат. Російської Федерації 2401502. МПК Н02Р21/00. Опубл. 10.10.2010 Бюл. № 28, 2005 р. Александров Є.В., Александров М.Є., Лагун В.В., Климов Г.Г.), частотно-регульований асинхронний електропривод, що містить силовий блок з вхідними в нього послідовно з'єднаними випрямлячем напруги мережі, згладжуючим фільтром з датчиком напруги, інвертор напруги, керуючі входи якого з'єднані з виходами блока векторної ШІМ, асинхронний електродвигун, обмотки якого підключені через блок датчиків фазних струмів до виходу інвертора напруги, а вихідний вал - до датчика швидкості обертання його ротора і до передавального механізму, задатчик поточної кутової швидкості електродвигуна, за датчик потокозчеплення електродвигуна, послідовно з'єднані регулятор частоти обертання, до другого входу якого підключений вихід датчика швидкості обертання ротора, і перший блок ділення, регулятори активного і реактивного струму, координатний перетворювач напруг, виходи якого підключені до входів блока векторної ШІМ, координатний перетворювач струмів, з'єднаний входами до виходів блока датчиків фазних струмів, а виходами з другим входом регулятора реактивного струму і з першим входом регулятора активного струму, наглядовий блок стану електроприводу, забезпечений першим і другим масштабними підсилювачами, аперіодичною ланкою, дільником, перший інтегратором і першим суматором, при цьому вихід першого масштабного підсилювача підключений до першого входу дільника, вихід якого через перший інтегратор підключений до першого входу першого суматора, до другого входу якого підключений вихід другого масштабного підсилювача, вихід першого суматора підключений до одного з входів блока векторної ШІМ, до входу координатного перетворювача струмів і до входу координатного перетворювача напруг, вихід аперіодичної ланки з'єднаний з другим входом дільника і другим входом першого блока ділення, а датчик швидкості обертання ротора електродвигуна виконаний у вигляді імпульсного датчика з двома виходами, перший з яких є виходом кутового положення ротора електродвигуна, а другий - виходом швидкості обертання ротора електродвигуна, при цьому перший вихід імпульсного датчика з'єднаний з входом другого масштабного підсилювача, який відрізняється тим, що в нього введені послідовно з'єднані перший функціональний перетворювач, перший і другий вхід якого з'єднані відповідно з виходом задатчика потокозчеплення і другим виходом імпульсного датчика, перший перемножувач, регулятор потокозчеплення, другий вхід якого з'єднаний з виходом аперіодичної ланки, і перший блок обмеження, вихід якого підключений до першого входу регулятора реактивного струму і входу аперіодичної ланки, другий функціональний перетворювач, вихід якого підключений до другого входу першого перемножувача, послідовно з'єднані другий блок обмеження, до входу якого підключений регулятор реактивного струму, і другий суматор, послідовно з'єднані третій блок обмеження, до входу якого підключений регулятор активного струму, і третій суматор, блок обмеження напруги, до першого і другого входів якого підключені відповідно другий і третій суматори, виходи блока обмеження напруги підключені до входів координатного перетворювача напруг, блок корекції, перший, другий, третій і четвертий входи якого підключені відповідно до першого і другого виходів координатного перетворювача струмів, до другого виходу імпульсного датчика і виходу аперіодичної ланки, а перший і другий виходи відповідно - до другого входів другого і третього суматорів, послідовно з'єднані перший релейний елемент, вхід якого підключений до виходу задатчика потокозчеплення, і логічний суматор, другий релейний елемент, вхід якого підключений до виходу аперіодичної ланки, а вихід - до другого входу логічного суматора, послідовно з'єднані комутатор, вхід якого з'єднаний з виходом задатчика поточної кутової швидкості, і за датчик інтенсивності, вихід якого підключений до першого входу регулятора частоти обертання електродвигуна, а також четвертий блок обмеження, вхід якого підключений до виходу першого блока ділення, а вихід до другого входу регулятора активного струму і входу першого масштабного підсилювача, при цьому керуючий вхід комутатора з'єднаний з виходом логічного суматора. Спільними ознаками аналога та корисної моделі, що заявляється, є: асинхронний електропривод, що містить силовий блок з вхідними в нього послідовно з'єднаними випрямлячем напруги мережі, згладжуючим фільтром з датчиком напруги, інвертор напруги, керуючі входи якого з'єднані з виходами блока векторної ШІМ, асинхронний електродвигун, обмотки якого підключені через блок датчиків фазних струмів до виходу інвертора напруги, а вихідний вал - до датчика швидкості обертання його ротора, координатний перетворювач напруг, виходи якого підключені до входів блока векторної ШІМ, координатний перетворювач струмів, з'єднаний входами до виходів блока датчиків фазних струмів. Недоліками даного пристрою є: відсутність передачі електричної енергії до мережі; відсутність можливості формування заданого мережевого струму для підтримання напруги мережі на заданому рівні. 2 UA 93219 U 5 10 15 20 25 30 35 40 45 50 55 60 Найбільш близьким технічним рішенням до корисної моделі, що заявляється, є спосіб керування автономним асинхронним генератором з короткозамкненим ротором (Спосіб керування автономним асинхронним генератором з короткозамкненим ротором пат. України 51704. МПК Н02Р9/00. Опубл. 26.07.2010 Бюл. № 14, 2010 р. Мазуренко Л.І. Романенко В. І.), спосіб керування автономним асинхронним генератором з короткозамкненим ротором, що збуджується від вентильного перетворювача, при якому зовнішню характеристику формують зміною частоти цього перетворювача, зміну частоти здійснюють таким чином, що визначають положення робочої точки, аналізують її розміщення відносно лінії перемикання з жорсткої на крутоспадну ділянку характеристики, при знаходженні робочої точки над лінією перемикання з жорсткої на крутоспадну ділянку характеристики як регульовану величину вибирають напругу, її задане значення визначають із бажаної зовнішньої характеристики по величині струму, і частоту вентильного перетворювача змінюють у функції відхилення напруги від заданого значення, а при знаходженні робочої точки під лінієюперемикання з жорсткої на крутоспадну ділянку характеристики як регульовану величину вибирають струм, його задане значення визначають із бажаної зовнішньої характеристики по величині напруги і частоту вентильного перетворювача змінюють у функції відхилення струму від заданого значення. Спільними ознаками прототипу та корисної моделі, що заявляється, є: спосіб керування автономним асинхронним генератором з короткозамкненим ротором, що збуджується від вентильного перетворювача. Недоліком технічного рішення є: відсутність передачі електричної енергії до мережі; відсутність можливості формування заданого мережевого струму для підтримання напруги мережі на заданому рівні; відсутність передавання електричної енергії для мережі змінного струму. Відомий пристрій вибрано за прототип. В основу корисної моделі поставлена задача удосконалення способу керування автономним асинхронним генератором з короткозамкненим ротором шляхом керування генераторним та мережевим перетворювачами, з контролем струмів генератора та мережі, контролем напруги конденсатора ланки постійного струму, забезпечити рівень реактивної потужності асинхронного генератора та передачу активної потужності від генератора до трифазної електричної мережі змінного струму. Зазначений технічний результат досягається тим, що в способі керування автономним асинхронним генератором з короткозамкненим ротором, при якому привідний механізм розкручує ротор асинхронного генератора, швидкість обертання ротора контролюється датчиком швидкості, електричну енергію асинхронного генератора передають на генераторний перетворювач, контролюють струми фаз генератора, передають енергію з генераторного перетворювача на конденсатор, контролюють напругу конденсатора, згідно з корисною моделлю максимальну величину швидкості обмежують на заданому рівні кутової швидкості, розраховують механічний момент, виконують пряме перетворення Парка, задають потокозчеплення ротора, розраховують задану пряму проекцію вектора струму генератора, струм намагнічення, задану ортогональну проекцію вектора струму генератора, поточне положення ротору, виконують зворотне перетворення Парка заданих струмів, розраховують різницю поточного струму та заданого стуму для відповідних фаз генератора, визначають рівень вихідної напруги керування транзисторами верхнього та нижнього плеча генераторного перетворювача, керують генераторним перетворювачем, розраховують різницю поточної напруги конденсатора і заданої напруги конденсатора, корегують сигнал помилки, визначають ортогональну пряму проекцію струму мережевого перетворювача, контролюють струм та напругу мережі, виконують пряме перетворення Парка для струму та напруги, визначають задані проекції напруги мережевого перетворювача, виконують зворотне перетворення Парка заданої напруги, розраховують опірну напругу, визначають рівень вихідної напруги керування транзисторами мережевого перетворювача по фазам, керують мережевим перетворювачем, передають енергію з мережевого перетворювача до трифазної електричної мережі змінного струму. Корисна модель пояснюється кресленням, де на кресленні представлена схема пристрою що реалізує пропонований спосіб, який містить: 1 - привідний механізм; 2 - датчик швидкості; 3 система керування швидкістю; 4 - асинхронний генератор з короткозамкненим ротором; 5 датчик струму; 6 - датчик струму; 7 - генераторний перетворювач; 8 - система керування генераторним перетворювачем; 9 - конденсатор; 10 - датчик напруги; 11 - датчик напруги; 12 система керування напругою конденсатора; 13 - мережевий перетворювач; 14 - система керування мережевим перетворювачем; 15 - фільтр; 16 - мережа; 17 - координатний перетворювач струму; 18 - координатний перетворювач; 19 - координатний перетворювач 3 UA 93219 U 5 струму; 20 - координатний перетворювач напруги; 21 - координатний перетворювач; 22 - блок керування вектором поля, 23 - блок релейного керування струмом, 24 - блок керування вектором струму, 25 - блок широтно-імпульсної модуляції. Привідний механізм 1 який розкручує ротор асинхронного генератора 4, швидкість обертання ротора контролюється датчиком швидкості 2 причому максимальна величина швидкості обмежується за допомогою системи керування швидкістю 3 на входи якої поступають сигнали з датчика швидкості 2, і заданої кутової швидкості ref . Електричну енергію асинхронного генератора 4 передають на генераторний перетворювач 7. Контролюють датчиками 5 струми фаз генератора iabc.gn . Координатним перетворювачем 10 струму 17 виконують перетворення Парка: 2 id ia cos ib cos( 120 ) ic cos( 120 ) , (1) 3 2 iq ia cos ib cos( 120 ) ic sin( 120 ) , (2) 3 1 i0 (ia ib ic ) . (3) 3 Передають струм idq.gn з координатного перетворювача струму 17 на блок керування 15 вектором поля 22. Розраховують в системі керування швидкістю 6 електромагнітний момент асинхронного генератора M . В системі керування швидкістю розраховують різницю заданої кутової швидкістю ref та поточної кутової швидкість : ref . (4) Електромагнітний момент асинхронного генератора M : M k p , (5) 20 де k p JL r k дс 3zpLmk дш Ткс ; J - момент інерції приведені до валу асинхронного двигуна; L r - індуктивність ротора; Lm індуктивність намагнічення двигуна; k дс - коефіцієнт передачі датчика струму; Ткс - мала 25 некомпенсована постійна часу контуру швидкості; z p - число пар полюсів двигуна; k li коефіцієнт передачі датчика швидкості; Розраховують задану пряму проекцію вектора струму генератора за віссю d в блоці 22: iref r / Lm , (6) d.gn де r - потокозчеплення ротора задається const; Lm - індуктивність намагнічення двигуна. Розраховують струм намагнічення в блоці 22: i id Lm , (7) 30 де id - реактивна складова струму; Lm - індуктивність намагнічення двигуна. Розраховують задану ортогональну проекцію вектора струму генератора за віссю q в блоці 35 22: iref q.gn 2M , (8) 3r zp kr де M - електромагнітний момент; r - потокозчеплення ротора; z p - число пар полюсів 40 двигуна; k r Lm ; L r - індуктивність ротора. Lr Розраховують поточне положення ротору в блоці 22: Lm iq (r k )dt , (9) Tr r 4 UA 93219 U де r - частота обертання вектору потокозчеплення ротора; iq - активна складова струму; k - коефіцієнт зв'язку струму потокозчеплення; Tr Lr - постійна часу роторного кола. Rr Координатним перетворювачем 18 виконують зворотне перетворення поточних струмів iref , iref : d.gn q.gn 5 iref iref cos( ) iref sin( ) ; (10) q.gn a.gn d.gn 2 2 ) iref sin( ) ; (11) q.gn 3 3 ref ref ref . (12) ic.gn ia.gn ib.gn iref iref cos( b.gn d.gn В блоці релейного керування струмом 23 розраховують різницю поточного струму i та abc.gn заданого стуму iref .gn для відповідних фаз: abc 10 i iref ,gn iabc,gn . (13) abc Визначають рівень вихідної напруги керування транзисторами верхнього та нижнього плеча генераторного перетворювача 7 по фазі a : UHI .a VT ULO.a VT 15 20 1 при i iband 0 при i iband , (14) 1 при i iband . (15) 0 при i iband Аналогічно визначають рівні напруги керування транзисторами верхнього та нижнього плеча генераторного перетворювача за фазами b, і c. На генераторний перетворювач 7 від системи керування генераторним перетворювачем 8 передають напруги управління генераторним перетворювачем ( UHI .a , ULO.a , UHI .b , ULO.b , UHI .c , ULO.c ), забезпечуючи рівень реактивної потужності в VT VT VT VT VT VT генераторі, та передачу активної потужності до конденсатора 9. Контролюють датчиком 10 напругу конденсатора 9. В системі керування напругою конденсатора 12 розраховують різницю поточної напруги конденсатора uc і заданої напруги конденсатора uref : c u uref uc . (16) c 25 Корегують сигнал помилки та визначають струм iref : q iref u k . (17) q Контролюють датчиком 6 струми фаз мережі iabc .gr , датчиком 11 контролюють напругу фаз мережі uabc.gr . Координатним перетворювачем струму 19 виконують перетворення Парка, 30 35 аналогічно формулам (1)-(3). Координатним перетворювачем напруги 20 здійснюють перетворення напруги: 2 ed.gr ua cos gr ub cos(gr 120 ) uc cos(gr 120 ) , (18) 3 2 eq.gr ua cos gr ub sin( gr 120 ) uc sin( gr 120 ) , (19) 3 1 e0 (ua ub uc ) . (20) 3 На підставі виміряних значень струмів та напруг мережі, над якими виконано перетворення Парка, з урахуванням заданих проекцій вектора струму мережі iref.gr та поточних проекцій dq вектора напруги e dq.gr визначають задані проекції вектора напруги мережевого перетворювача в блоці керування вектором струму 24: uref ed.gr iref id.gr kep iref jLiq , (21) d.gr d.gr q.gr 5 UA 93219 U k дmTr ; Tr - постійна часу фільтра мережі 15; Lm - індуктивність фільтра 15 uref eq.gr iref iq.gr kep iref jLid , (22) q.gr q.gr q.gr де k ep 2TкеLm max мережі; max - граничне значення частоти мережі; k дm - коефіцієнт передачі датчика струму 6 мережі; Тке - мала некомпенсована постійна часу контуру. 5 Виконують зворотне перетворення координат в блоці 21 заданої напруги uref.gr з d, q dq координат в a, b, c: uref ud cosgr uq singr , (23) a.gr 2 2 ) uq sin( gr ) , (24) 3 3 ref . (25) uc.gr (ua ub ) uref ud cos(gr b.gr 10 Передають напругу мережі uref .gr на перший вхід блока широтно-імпульсної модуляції 25, abc на другий вхід передають задану напругу конденсатора uref . В блоці широтно-імпульсної c модуляції 25 розраховують опірну напругу: 2 arctgtg tmod 2 t . (26) 2 Визначають рівень вихідної напруги керування транзисторами мережевого перетворювача 13 по фазі a: Ucarr 15 Uout.a 20 1 при Ucarr Uref . (27) 0 при Ucarr Uref Аналогічно визначають рівні напруги керування транзисторами мережевого перетворювача за фазами b і c. На мережевий перетворювач 13 від системи керування мережевим перетворювачем 14 передають напруги управління мережевим перетворювачем, забезпечуючи передачу активної потужності до мережі та здійснюючи компенсацію реактивної потужності мережі. Фільтр 15 знижує вплив вищих гармонік струму і напруги, які віддаються в мережу 16. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 35 40 45 Спосіб керування автономним асинхронним генератором з короткозамкненим ротором, при якому привідний механізм розкручує ротор асинхронного генератора, швидкість обертання ротора контролюється датчиком швидкості, електричну енергію асинхронного генератора передають на генераторний перетворювач, контролюють струми фаз генератора, передають енергію з генераторного перетворювача на конденсатор, контролюють напругу конденсатора, який відрізняється тим, що максимальну величину швидкості обмежують на заданому рівні кутової швидкості, розраховують механічний момент, виконують пряме перетворення Парка, задають потокозчеплення ротора, розраховують задану пряму проекцію вектора струму генератора, струм намагнічення, задану ортогональну проекцію вектора струму генератора, поточне положення ротору, виконують зворотне перетворення Парка заданих струмів, розраховують різницю поточного струму та заданого стуму для відповідних фаз генератора, визначають рівень вихідної напруги керування транзисторами верхнього та нижнього плеча генераторного перетворювача, керують генераторним перетворювачем, розраховують різницю поточної напруги конденсатора і заданої напруги конденсатора, корегують сигнал помилки, визначають ортогональну пряму проекцію струму мережевого перетворювача, контролюють струм та напругу мережі, виконують пряме перетворення Парка для струму та напруги, визначають задані проекції напруги мережевого перетворювача, виконують зворотне перетворення Парка заданої напруги, розраховують опірну напругу, визначають рівень вихідної напруги керування транзисторами мережевого перетворювача по фазам, керують мережевим перетворювачем, передають енергію з мережевого перетворювача до трифазної електричної мережі змінного струму. 6 UA 93219 U Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
Автори англійськоюBialobrezhskyi Oleksii Volodymyrovych
Автори російськоюБялобржеский Алексей Владимирович
МПК / Мітки
МПК: H02P 9/00
Мітки: генератором, асинхронним, керування, короткозамкненим, автономним, ротором, спосіб
Код посилання
<a href="https://ua.patents.su/9-93219-sposib-keruvannya-avtonomnim-asinkhronnim-generatorom-z-korotkozamknenim-rotorom.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування автономним асинхронним генератором з короткозамкненим ротором</a>
Спосіб керування автономним асинхронним генератором з короткозамкненим ротором
Номер патенту: 51704
Опубліковано: 26.07.2010
Автори: Мазуренко Леонід Іванович, Романенко Володимир Іванович
МПК: H02P 9/00
Мітки: короткозамкненим, генератором, спосіб, автономним, керування, асинхронним, ротором
Формула / Реферат:
Спосіб керування автономним асинхронним генератором з короткозамкненим ротором, що збуджується від вентильного перетворювача, при якому зовнішню характеристику формують зміною частоти цього перетворювача, який відрізняється тим, що зміну частоти здійснюють таким чином, що визначають положення робочої точки, аналізують її розміщення відносно лінії перемикання з жорсткої на крутоспадну ділянку характеристики, при знаходженні робочої точки над...
Переставний блок керування трифазним асинхронним електродвигуном з короткозамкненим ротором
Номер патенту: 1954
Опубліковано: 15.08.2003
Автори: Омельченко Дмитро Олександрович, Омельченко Юрій Сергійович
МПК: H02K 17/00
Мітки: керування, переставний, ротором, електродвигуном, асинхронним, блок, короткозамкненим, трифазним
Формула / Реферат:
Блок керування трифазним асинхронним електродвигуном з короткозамкненим ротором в переставному діелектричному корпусі, що містить прибори комутації, який відрізняється тим, що в блок додатково введений електронний перетворювач частоти струму, скомутований з приборами регулювання.
Спосіб керування при провалі мережної напруги асинхронним електроприводом з трифазним автономним інвертором
Номер патенту: 55778
Опубліковано: 27.12.2010
Автори: Косенко Ігор Олександрович, Волков Олександр Васильович
МПК: H02H 3/00, H02P 21/00
Мітки: керування, автономним, спосіб, трифазним, напруги, асинхронним, мережної, провалі, інвертором, електроприводом
Формула / Реферат:
1. Спосіб керування при провалі мережної напруги асинхронним електроприводом з трифазним автономним інвертором, при якому контролюють фазні мережні напруги, фазні статорні струми і напруги двигуна, визначають через фазні статорні струми і напруги двигуна модулі узагальнених векторів електрорушійної сили і потокозчеплення двигуна, а через фазні мережні напруги визначають модуль вектора мережної напруги, порівнюють модуль вектора мережної...
Спосіб керування вітроелектротехнічним комплексом з асинхронним генератором
Номер патенту: 86426
Опубліковано: 25.12.2013
Автори: Бойко Сергій Миколайович, Сінчук Олег Миколайович
МПК: F03D 9/00
Мітки: вітроелектротехнічним, керування, асинхронним, генератором, комплексом, спосіб
Формула / Реферат:
Спосіб керування вітроелектротехнічним комплексом з асинхронним генератором (АГ), який відрізняється тим, що регулювання частоти та напруги на виході генератора відбувається завдяки плавній зміні рівня додаткової ємності та баластним навантаженням, завдяки чому керування вихідними параметрами АГ здійснюється узгоджено зі зміною швидкості діючого в даний момент часу повітряного потоку та зміною потужності підключеного навантаження, в...
Спосіб керування асинхронним генератором з конденсаторним збудженням
Номер патенту: 81383
Опубліковано: 25.06.2013
Автори: Зачепа Юрій Володимирович, Красюков Роман Вадимович, Родькін Дмитро Йосипович
МПК: H02P 9/00
Мітки: збудженням, керування, конденсаторним, спосіб, генератором, асинхронним
Формула / Реферат:
Спосіб керування асинхронним генератором з конденсаторним збудженням, в якому збудження генератора здійснюється від регульованого джерела реактивної потужності, встановлюється батарея початкового намагнічування і батарея керованого збудження, який відрізняється тим, що вводяться датчики вимірювання активних та реактивних складових струму та напруги генератора, величини параметрів яких заводяться в обчислювальний пристрій, де в залежності від...
Попередній патент: Спосіб інформаційного забезпечення користувачів
Наступний патент: Пристрій для реалізації динамічних режимів тягового комплексу електровозу
Випадковий патент: Спосіб багаторазової інтенсивної пластичної деформації заготівки зі зміною напрямку деформування