Спосіб керування при провалі мережної напруги асинхронним електроприводом з трифазним автономним інвертором
Номер патенту: 55778
Опубліковано: 27.12.2010
Автори: Косенко Ігор Олександрович, Волков Олександр Васильович

Формула / Реферат
1. Спосіб керування при провалі мережної напруги асинхронним електроприводом з трифазним автономним інвертором, при якому контролюють фазні мережні напруги, фазні статорні струми і напруги двигуна, визначають через фазні статорні струми і напруги двигуна модулі узагальнених векторів електрорушійної сили і потокозчеплення двигуна, а через фазні мережні напруги визначають модуль вектора мережної напруги, порівнюють модуль вектора мережної напруги з його установленням і модулем вектора електрорушійної сили двигуна, при перевищенні модулем узагальненого вектора мережної напруги його установлення формують необхідні задані значення модуля вектора потокозчеплення, намагнічуючої й активної проекцій вектора статорного струму двигуна, на рівні яких регулюють фактичні значення модуля вектора потокозчеплення і зазначених проекцій вектора статорного струму двигуна, визначають провал мережної напруги при зменшенні модуля вектора мережної напруги нижче рівня його установлення, при провалі мережної напруги обнуляють задане значення активної проекції вектора статорного струму двигуна, порівнюють модуль вектора потокозчеплення двигуна з його заданим значенням, визначають відновлення мережної напруги при збільшенні модуля вектора мережної напруги вище рівня його установлення, при відновленні мережної напруги подають відмикаючі імпульси керування на силові ключі інвертора відповідно до штатного режиму його роботи, а при досягненні модулем вектора потокозчеплення двигуна його заданого значення формують необхідне завдання для активної проекції вектора статорного струму, який відрізняється тим, що контролюють струм на виході випрямляча, при провалі мережної напруги і при перевищенні модулем вектора мережної напруги значення модуля вектора електрорушійної сили двигуна регулюють фактичні значення модуля вектора потокозчеплення і намагнічуючої проекції вектора статорного струму двигуна на рівні їх заданих значень, при провалі мережної напруги після зниження модуля вектора мережної напруги менше значення модуля вектора електрорушійної сили двигуна формують відмикаючі імпульси керування для двох силових ключів в одній із фаз випрямляча, а при зменшенні вихідного струму випрямляча до нульового значення знімають відмикаючі імпульси керування з силових ключів інвертора й випрямляча.
2. Спосіб за п. 1, який відрізняється тим, що обнуління заданого значення активної проекції вектора статорного струму здійснюють при провалі мережної напруги після зниження модуля вектора мережної напруги менше значення модуля вектора електрорушійної сили двигуна, а при провалі мережної напруги і після зниження модуля вектора електрорушійної сили двигуна менше значення модуля вектора мережної напруги припиняють обнуляти задане значення активної проекції вектора статорного струму й обмежують максимальне задане значення швидкості двигуна на рівні, що обчислюється як відношення модуля вектора мережної напруги до модуля вектора потокозчеплення двигуна.
3. Спосіб за п. 1, який відрізняється тим, що порівнюють значення вихідного струму випрямляча з його установленням, а після провалу мережної напруги при перевищенні струмом на виході випрямляча його установлення формують відмикаючі імпульси керування для двох силових ключів однієї із фаз інвертора.
4. Спосіб за п. 1, який відрізняється тим, що порівнюють модуль вектора потокозчеплення двигуна з його установленням, якщо при відновленні мережної напруги модуль вектора потокозчеплення двигуна не перевищує його установлення, подають відмикаючі імпульси керування на один із силових ключів в анодній і один із силових ключів у катодної групі різних двох фаз трифазного інвертора, а при досягненні поточним значенням модуля потокозчеплення двигуна його заданого значення знімають зазначені імпульси керування і подають імпульси керування на силові ключі інвертора відповідно до штатного режиму його роботи.
Текст
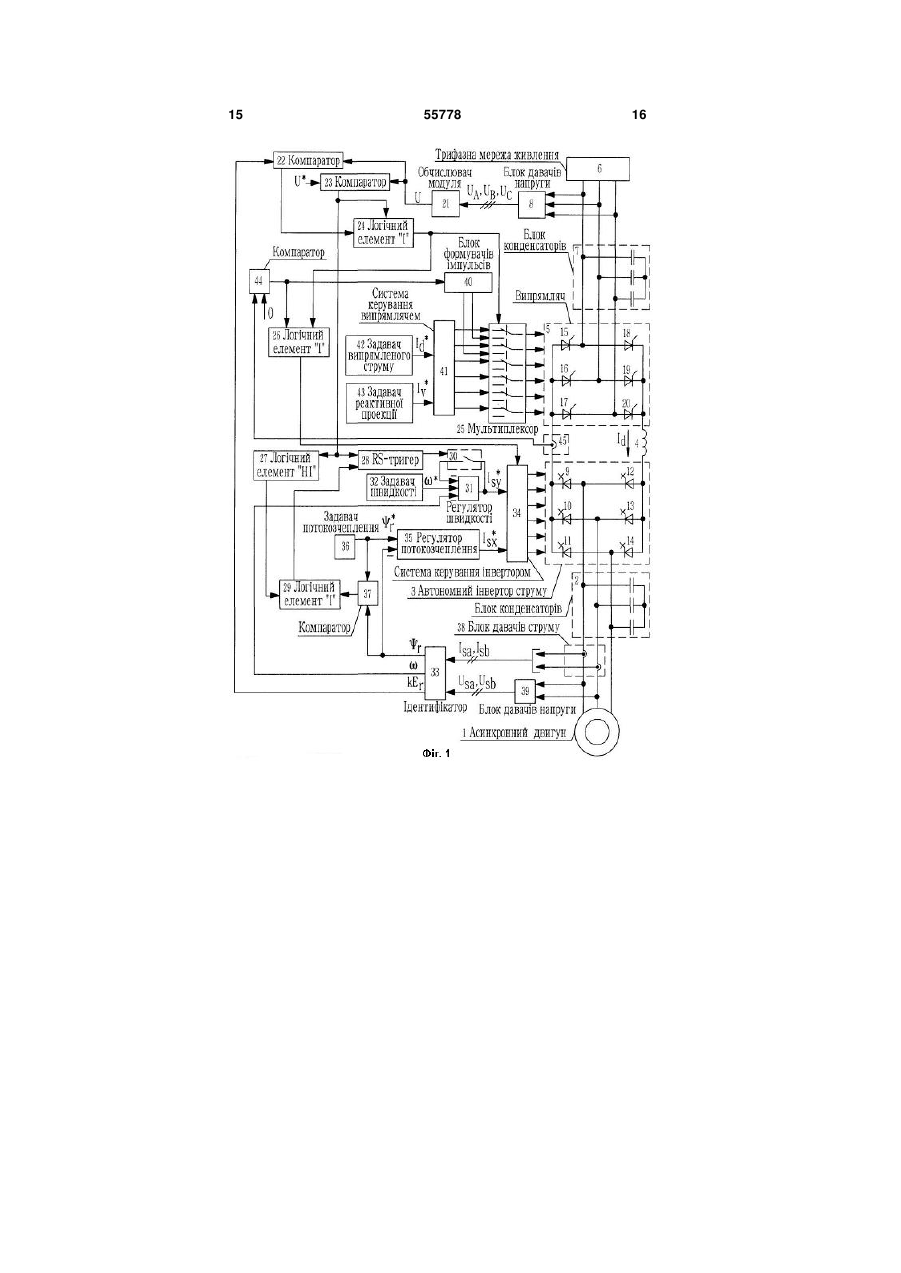
1. Спосіб керування при провалі мережної напруги асинхронним електроприводом з трифазним автономним інвертором, при якому контролюють фазні мережні напруги, фазні статорні струми і напруги двигуна, визначають через фазні статорні струми і напруги двигуна модулі узагальнених векторів електрорушійної сили і потокозчеплення двигуна, а через фазні мережні напруги визначають модуль вектора мережної напруги, порівнюють модуль вектора мережної напруги з його установленням і модулем вектора електрорушійної сили двигуна, при перевищенні модулем узагальненого вектора мережної напруги його установлення формують необхідні задані значення модуля вектора потокозчеплення, намагнічуючої й активної проекцій вектора статорного струму двигуна, на рівні яких регулюють фактичні значення модуля вектора потокозчеплення і зазначених проекцій вектора статорного струму двигуна, визначають провал мережної напруги при зменшенні модуля вектора мережної напруги нижче рівня його установлення, при провалі мережної напруги обнуляють задане значення активної проекції вектора статорного струму двигуна, порівнюють модуль вектора потокозчеплення двигуна з його заданим значенням, визначають відновлення мережної напруги при збільшенні модуля вектора мережної напруги вище рівня його установлення, при відновленні мережної напруги подають відмикаючі імпульси керування на силові ключі інвертора відповідно до штатного режиму його роботи, а при досягненні модулем вектора потокозчеплення двигуна його заданого значення формують необхідне завдання для активної проекції вектора статорного струму, який відрізняється тим, що контролюють струм на виході випрямляча, при провалі мережної напруги і при перевищенні модулем век 2 (19) 1 3 55778 4 чення знімають зазначені імпульси керування і інвертора відповідно до штатного режиму його роботи. подають імпульси керування на силові ключі Корисна модель відноситься до галузі електротехніки і може бути використана для керування частотно-регульованим асинхронним електроприводом з автономним інвертором струму. Відомий спосіб керування при провалі мережної напруги асинхронним електроприводом з трифазним автономним інвертором напруги і тиристорним керованим випрямлячем [Метельский В. П. Управление частотно-регулируемыми асинхронными электроприводами при просадках и провалах питающего напряжения / В. П. Метельский, А. Г. Лохматов // Вісник КДПУ. -2005. - Вип.№4(33). С.57-59], заснований на тому, що при зменшенні мережної напруги нижче його мінімально припустимого робочого значення примусово обнуляють задане значення активної проекції вектора статорного струму двигуна і закривають тиристори керованого випрямляча (шляхом зсуву їх керуючих імпульсів в інверторний режим), а при відновленні мережної напруги - задають штатні значення кутів керування тиристорів випрямляча і формують необхідне задане значення активної проекції вектора статорного струму двигуна, що забезпечує безаварійний вихід електропривода на заданий режим роботи. При цьому відомий спосіб стосовно до асинхронного електропривода з автономним інвертором струму характеризується збільшеним часом виходу на заданий режим роботи і виникненням перенапруг при провалах мережної напруги (внаслідок обриву струму в ланці постійного струму). Найбільш близьким за сукупністю ознак до способу, що заявляється, є спосіб керування при провалі мережної напруги асинхронним електроприводом з трифазним автономним інвертором напруги [Волков А.В. Управление асинхронными электроприводами с активным выпрямителем при провале сетевого напряжения /А. В. Волков, Н. Л. Антонов // Вісник КДПУ. - 2008. -Вип.№3(50). - С. 18-23], при якому контролюють фазні мережні напруги, фазні статорні струми й напруги двигуна, визначають через фазні статорні струми і напруги двигуна модулі узагальнених векторів електрорушійної сили (ЕРС) та потокозчеплення двигуна, а через фазні мережні напруги визначають модуль вектора мережної напруги, порівнюють модуль вектора мережної напруги з його установленням і модулем вектора ЕРС двигуна, при перевищенні модулем узагальненого вектора мережної напруги його установлення формують необхідні задані значення модуля вектора потокозчеплення, намагнічуючої й активної проекцій вектора статорного струму двигуна, на рівні яких регулюють фактичні значення модуля вектора потокозчеплення і зазначених проекцій вектора статорного струму двигуна, визначають провал мережної напруги при зменшенні модуля вектора мережної напруги нижче рівня його установлення, при провалі мережної напруги обнуляють задане значення активної проекції вектора статорного струму двигуна, а при зниженні модуля вектора мережної напруги менш значення модуля вектора ЕРС двигуна знімають відмикаючі імпульси керування з силових ключів інвертора, порівнюють модуль вектора потокозчеплення двигуна з його заданим значенням, визначають відновлення мережної напруги при збільшенні модуля вектора мережної напруги вище рівня його установлення, при відновленні мережної напруги подають відмикаючі імпульси керування на силові ключі інвертора відповідно до штатного режиму його роботи, а при досягненні модулем вектора потокозчеплення двигуна його заданого значення формують необхідне завдання для активної проекції вектора статорного струму. Недоліком відомого способу є його обмежена область застосування тільки для асинхронних електроприводів з автономними інверторами напруги (АlH) з широтно-імпульсною модуляцією (ШІМ) чи спрощеним дволанковим безпосереднім перетворювачем частоти. При цьому зазначений відомий спосіб керування при провалі мережної напруги на практиці не можна застосовувати для асинхронних електроприводів на основі автономного інвертора струму, оскільки при цьому способі в зазначеному режимі після зниження модуля вектора мережної напруги менш значення модуля вектора ЕРС двигуна в асинхронному електроприводі з інвертором струму виникають (через обрив струму в ланці постійного струму) перенапруги на силових ключах інвертора, які приводять до виходу з ладу цих ключів у даному режимі. В основу корисної моделі поставлено завдання розробки способу керування при провалі мережної напруги стосовно до частотно-регульованого асинхронного електропривода з трифазним автономним інвертором струму, в якому за рахунок застосування нових операцій (контроль струму на виході випрямляча, регулювання фактичних значень модуля вектора потокозчеплення двигуна та намагнічуючої проекції вектора статорного струму на рівні заданих значень при провалі мережної напруги і перевищенні модулем вектора мережної напруги значення модуля вектора ЕРС двигуна, формування відмикаючих імпульсів керування для двох силових ключів в одній з фаз випрямляча при провалі мережної напруги і після зниження модуля вектора мережної напруги менш значення модуля вектора ЕРС двигуна, зняття відмикаючих імпульсів керування з силових ключів інвертора та випрямляча при зменшенні вихідного струму випрямляча до нульового значення) досягається безаварійне керування електроприводом у зазначеному режимі і скорочується час його виходу на заданий режим роботи. Для вирішення поставленого завдання в способі керування при провалі мережної напруги асинхронним електроприводом з трифазним автономним інвертором, при якому контролюють фазні мережні напруги, фазні статорні струми і напруги двигуна, визначають через фазні статорні струми і 5 напруги двигуна модулі узагальнених векторів електрорушійної сили і потокозчеплення двигуна, а через фазні мережні напруги визначають модуль вектора мережної напруги, порівнюють модуль вектора мережної напруги з його установленням й модулем вектора електрорушійної сили двигуна, при перевищенні модулем узагальненого вектора мережної напруги його установлення формують необхідні задані значення модуля вектора потокозчеплення, намагнічуючої й активної проекцій вектора статорного струму двигуна на рівні яких регулюють фактичні значення модуля потокозчеплення і зазначених проекцій вектора статорного струму двигуна, визначають провал мережної напруги при зменшенні модуля вектора мережної напруги нижче рівня його установлення, при провалі мережної напруги обнуляють задане значення активної проекції вектора статорного струму двигуна, порівнюють модуль вектора потокозчеплення двигуна з його заданим значенням, визначають відновлення мережної напруги при збільшенні модуля вектора мережної напруги вище рівня його установлення, при відновленні мережної напруги подають відмикаючі імпульси керування на силові ключі інвертора відповідно до штатного режиму його роботи, а при досягненні модулем вектора потокозчеплення двигуна його заданого значення формують необхідне завдання для активної проекції вектора статорного струму, відповідно до корисної моделі контролюють струм на виході випрямляча, при провалі мережної напруги і при перевищенні модулем вектора мережної напруги значення модуля вектора електрорушійної сили двигуна регулюють фактичні значення модуля вектора потокозчеплення двигуна і намагнічуючої проекції вектора його статорного струму на рівні їх заданих значень, при провалі мережної напруги і після зниження модуля вектора мережної напруги менш значення модуля вектора електрорушійної сили двигуна формують відмикаючі імпульси керування для двох силових ключів в одній із фаз випрямляча, а при зменшенні вихідного струму випрямляча до нульового значення знімають відмикаючі імпульси керування з силових ключів інвертора та випрямляча. Також при провалі мережної напруги після зниження модуля вектора електрорушійної сили двигуна менш значення модуля вектора мережної напруги припиняють обнуляти задане значення активної проекції вектора статорного струму й обмежують максимальне задане значення швидкості двигуна на рівні, що обчислюється як відношення модуля вектора мережної напруги до модуля вектора потокозчеплення двигуна, а обнуління активної проекції вектора статорного струму визначають при провалі мережної напруги і при зниженні модуля вектора мережної напруги менш значення модуля вектора електрорушійної сили двигуна. Також порівнюють значення вихідного струму випрямляча з його установленням, а після провалу мережної напруги при перевищенні струмом на виході випрямляча його установлення формують відмикаючі імпульси керування для двох силових ключів однієї із фаз інвертора. 55778 6 Також порівнюють модуль вектора потокозчеплення двигуна з його установленням, якщо при відновленні мережної напруги модуль вектора потокозчеплення двигуна не перевищує згаданого його установлення подають відмикаючі імпульси керування на один із силових ключів в анодній і один із силових ключів у катодної групі різних двох фаз трифазного інвертора, а при досягненні поточним значенням модуля вектора потокозчеплення двигуна його заданого значення знімають зазначені імпульси керування і подають імпульси керування на силові ключі інвертора відповідно до штатного режиму його роботи. За рахунок введення в запропонованому способі додаткових контролюючих, регулюючих і керуючих операцій зазначений спосіб дозволяє виключити при провалі мережної напруги виходи з ладу силових ключів випрямляча й інвертора асинхронного електропривода (у тому числі в двигуневому та генераторному режимах роботи двигуна). При цьому запропоноване керування забезпечує можливість підтримки працездатності зазначеного електропривода (зі зменшеною продуктивністю) при зниженій мережній напрузі і швидкодіючий вихід електропривода на заданий режим роботи при відновленні мережної напруги. Спосіб, що заявляється, здійснюється за допомогою пристроїв, які показано на кресленнях: на Фіг.1 - функціональна схема варіанта пристрою, який реалізує запропонований спосіб; на Фіг.2 функціональна схема варіанта пристрою, який реалізує запропонований спосіб при підтримці працездатності (зі зниженою продуктивністю) електропривода при зниженій мережній напрузі; на Фіг.3 - функціональна схема варіанта пристрою, який реалізує запропонований спосіб при провалі мережної напруги в генераторному режимі роботи двигуна; на Фіг.4 - функціональна схема варіанта пристрою, який реалізує запропонований спосіб зі зменшеним часом виходу на заданий режим роботи електропривода при відновленні мережної напруги. Функціональна схема пристрою на Фіг.1 містить: трифазний асинхронний двигун 1, з'єднаний статорними обмотками з першим блоком конденсаторів 2 і зв'язаний через послідовно з'єднані автономний інвертор струму 3, згладжуючий реактор 4, випрямляч 5 із трифазною мережею живлення 6, підключеної своїми трьома фазами до другого блоку конденсаторів 7 і входів першого блоку давачів напруги 8. При цьому інвертор струму 3 виконаний у виді трифазної мостової схеми на шести тиристорах 9-14, що замикаються, а випрямляч 5-у виді трифазної мостової схеми, яка складається із шести звичайних (одноопераційних) або повністю керованих (двухопераційнних) тиристорів 15-20. Вихід блоку давачів 8 зв'язаний через обчислювач модуля 21 з першими входами першого 22 і другого 23 компараторів, пов'язаних своїми виходами відповідно з першим і другим входами першого логічного елемента "І" 24, вихід якого з'єднаний з керуючим входом мультиплексора 25 і першим входом другого логічного елемента "І" 26. Крім того, вихід другого компаратора 23 зв'язаний з входом логічного елемента "НІ" 27 і першим (S) 7 входом RS-тригера 28. Другий (R) вхід даного тригера 28 приєднаний до виходу третього логічного елемента "І" 29, а вихід - до керуючого входу ключа 30, приєднаного паралельно регулятору швидкості 31, зв'язаного своїм першим входом з виходом задавача швидкості 32, другим входом - з першим виходом ідентифікатора 33. Своїм виходом регулятор 31 з'єднаний з першим входом системи керування інвертором 34, зв'язаної своїми виходами з керуючими входами тиристорів 9-14 інвертора 3. Другий вхід системи керування інвертором 34 з'єднаний з виходом регулятора потокозчеплення 35, який підключений своїм першим входом до виходу задавача потокозчеплення 36 і першого входу третього компаратора 37. Другим своїм входом регулятор потокозчеплення 35 підключений до другого виходу ідентифікатора 33 і другого входу третього компаратора 37, з'єднаного своїм виходом з першим входом третього логічного елемента "І" 29, який підключений другим входом до виходу логічного елемента "НІ" 27. Блоки давачів струму 38 і напруги 39 підключені своїми входами до статорних обмоток двигуна 1, а виходами - відповідно до першого і другого входів ідентифікатора 33, третій вихід якого підключений до другого входу першого компаратора 22. Мультиплексор 25 з'єднаний своїми виходами з керуючими входами тиристорів 15-20 випрямляча 5, а входами - з виходами блоку формувачів імпульсів 40 і виходами системи керування випрямлячем 41, перший і другий входи якої підключені відповідно до виходів задавачів випрямленого струму 42 і реактивної проекції вектора мережного струму 43. Блок формувачів імпульсів 40 зв'язаний своїм керуючим входом з виходом четвертого компаратора 44 і з другим входом другого логічного елемента "І" 26, у якого вихід зв'язаний з керуючим входом системи керування інвертором 34, а вхід компаратора 44 з'єднаний з виходом давача струму 45, встановленого на вході інвертора 3. Функціональна схема пристрою на Фіг.2, який реалізує запропонований спосіб керування при підтримці працездатності (з меншою продуктивністю) асинхронного електропривода при зниженій мережній напрузі, містить додатково (у порівнянні з пристроєм, представленим на Фіг.1) блок регульованого обмеження 46 і задавач граничної швидкості 47, який першим входом з'єднаний з виходом обчислювача модуля 21, другим входом - з другим виходом ідентифікатора 33, а третім входом - з першим входом блоку регульованого обмеження 46 і виходом задавача швидкості 32. Своїм виходом задавач граничної швидкості 47 підключений до другого входу блоку регульованого обмеження 46, який зв'язаний своїм виходом з першим входом регулятора швидкості 31. Крім цього, на відміну від пристрою, представленого на Фіг.1, перший (S) вхід RS-тригера 28 і вхід логічного елемента "НІ" 27 зв'язані з виходом логічного елемента "І" 24. Функціональна схема пристрою на Фіг.3, що реалізує запропонований спосіб керування при 55778 8 генераторному режимі роботи двигуна, містить додатково (у порівнянні з пристроєм, представленим на Фіг.1) мультиплексор 48, блок формувачів імпульсів 49, логічний елемент "І" 50 й компаратор 51, який своїм входом підключений до виходу давача струму 45, а виходом - до першого входу логічного елемента "І" 50, з'єднаного своїм другим входом з виходом компаратора 23, а виходом - з керуючим входом мультиплексора 48. Цей мультиплексор своїми виходами зв'язаний з керуючими входами силових ключів 9-14 інвертора 3, а входами з'єднаний з виходами блоку формувачів імпульсів 49 і системи керування інвертором 34. Функціональна схема пристрою на Фіг.4, який реалізує запропонований спосіб керування при зменшенні часу виходу асинхронного електропривода на заданий режим роботи при відновленні мережної напруги, містить додатково (у порівнянні з пристроєм, представленим на Фіг.1) мультиплексор 48, блок формувачів імпульсів 49, логічний елемент "НІ" 52, RS-тригер 53, логічний елемент "І" 54 й компаратор 55, зв'язаний своїм входом із другим виходом ідентифікатора 33, а виходом - з першим входом логічного елемента "І" 54, другий вхід якого зв'язаний через логічний елемент "НІ" 52 з виходом компаратора 23. Своїм виходом логічний елемент "І" 54 підключений до першого (S) входу RS-тригера 53, який другим (R) входом з'єднаний з виходом компаратора 37, а виходом - з керуючим входом мультиплексора 48, виходи якого зв'язані з керуючими входами силових ключів 914 інвертора 3, а входи - з виходами блоку формувачів імпульсів 49 і системи керування інвертором 34. Запропонований спосіб керування при провалі мережної напруги асинхронним електроприводом з трифазним автономним інвертором струму здійснюється (розглянемо на прикладі пристрою, показаного на Фіг.1) наступним чином. За допомогою задавачів випрямленого струму 42 і реактивної проекції вектора мережного струму 43 задають для активного випрямляча 5 необхідні значення відповідно його вихідного струму Іd* і реактивної проекції Iv* (на вісь "v" обертової ортогональної координатної системи "u-v", орієнтованої віссю абсцис "u" за узагальненим вектором мережної напруги) узагальненого вектора мережного струму. Причому система керування випрямлячем 41 формує такі імпульси керування для силових ключів 15-20 випрямляча 5, які забезпечують підтримку фактичних значень вихідного струму Іd випрямляча 5 і реактивної проекції Iv вектора мережного струму на рівні їх заданих значень Іd* і Iv*. Іd= Іd* й Iv= Iv*. (1) При цьому слід відмітити, що випрямляч 5 може бути виконаний, як показано на Фіг.1, на одноопераційних тиристорах (при цьому, очевидно, завдання на реактивну проекцію I v задається рівним нулю), або - на повністю керованих двухопераційних тиристорах (тоді значення I v може задаватися ненульовим та різної полярності). За допомогою блоку давачів напруги 8 контролюють фазні мережні напруги UA, UB і Uc, через які за допомогою обчислювача модуля 21 розраховують значення модуля U узагальненого вектора 9 мережної напруги [Пивняк Г. Г. Современные частотно-регулируемые асинхронные электроприводы с широтно-импульсной модуляцией / Г. Г. Пивняк, А. В. Волков. - Днепропетровск: НГУ, 2006. -С. 14] із залежності: 2 (2) (UA 2 UB2 UC2 ) 3 U= . Обчислений модуль U вектора мережної напруги на входах компараторів 22 і 23 порівнюють відповідно з модулем kEr приведеного (до статора) вектора ЕРС ротора k E r двигуна та його установлення U , рівного: U* = 0,85UH , (3) де UH - номінальне значення модуля вектора мережної напруги. За допомогою давачів струму 38 і напруги 39 контролюють відповідно фазні статорні струми Isa, Isb і напруги Usa,Usb асинхронного двигуна 1, через які за допомогою ідентифікатора 33 визначають модулі r й kEr узагальнених векторів відповідно r й ЕРС k E ротора двигуна потокозчеплення r 1, а також - швидкість його обертання . За допомогою задавачів швидкості 32 і потокозчеплення 36 формують задані значення відповід но швидкості * і модуля r * вектора потокозчеплення двигуна, через які обчислюють у регуляторах швидкості 31 і потокозчеплення 35 відповідно задані значення активної I*sy й намагнічуючої I*sx проекцій (на осі обертової ортогональної координатної системи "х-у", орієнтованої віссю абсцис "х" за узагальненим вектором потокозчеплення двигуна) узагальненого вектора lS статорного струму двигуна. За даними значеннями проекцій I*sx й I*sy система керування інвертором 34 формує такі відмикаючі імпульси силовими ключами 9-14 інвертора 3, щоб фактичні і задані значення швидкості і потокозчеплення двигуна рівнялися між собою: (4) = * й r = r *. За допомогою давача струму 45 контролюють вихідний струм Id випрямляча 5 і порівнюють його значення з нульовим установленням у компараторі 44. На входах компаратора 37 порівнюють між собою задане r * і фактичне r значення модулів узагальненого вектора потокозчеплення двигуна. При нормальній мережній напрузі асинхронного електропривода (яка характеризується перевищенням поточного значення модуля U вектора мережної напруги над його установленням U й над модулем вектора ЕРС двигуна: U > kEr) на виходах компараторів 22, 23 та 44, керуючих входах мультиплексора 25 й системи керування інвертором 34, керуючому вході ключа 30 присутні сигнали лог. "0", а на виході компаратора 37 - сигнал лог. "1". При цьому ключ 30 розімкнений, а мультиплексор 25 передає на свої виходи сигнали, що надходять до нього від системи керування випрямлячем 41. 55778 10 При провалі мережної напруги (який визначають при зменшенні модуля U вектора мережної напруги нижче рівня його установлення U ) на виході компаратора 23 встановлюється сигнал лог. "1", який надходить на перший (S) вхід RS-тригера 28. По цьому сигналу формується (через послідовно з'єднані логічний елемент "НІ" 27 і логічний елемент "1" 29) на другому (R) вході згаданого тригера 28 сигнал лог. "0". При цьому на виході RS-тригера 28 встановлюється сигнал лог. "1", при якому ключ 30 замикається й обнуляє задане значення Isy активної проекції узагальненого вектора статорного струму: I*sy =0. (5) При провалі мережної напруги (U kEr), то на керуючий вхід мультиплексора 25 надходить з виходу компаратора 22 через логічний елемент "1" 24 сигнал лог. "0". При цьому мультиплексор 25 передає на свої виходи відмикаючі імпульси керування, які надходять для штатного режиму роботи випрямляча 5 від його системи керування 41. У такий спосіб при провалі мережної напруги здійснюється регулювання фактичних значень модуля r вектора потокозчеплення й намагнічуючої проекції Isx вектора статорного струму двигуна на рівні їх заданих значень, що дозволяє при наступному відновленні мережної напруги зменшити час виходу електропривода на заданий режим роботи (так як не потрібно витрачати час на насичення магнітного ланцюга двигуна). При відновленні мережної напруги (яке визначають при збільшенні модуля U вектора мережної напруги вище рівня його установлення U*) на виходах компараторів 22 і 23 встановлюються сигнали лог. "0", внаслідок чого через логічний елемент "І" 24 формуються на керуючих входах мультиплексора 25 і системи керування інвертором 34 сигнали рівні лог. "0". При цьому на випрямляч 5 через мультиплексор 25 передаються від системи керування випрямлячем 41 імпульси керування, які відповідають штатному режиму його роботи, а також формуються штатні імпульси керування для силових ключів інвертора 3. При досягненні на входах компаратора 37 фа ктичним значенням модуля r вектора потокозче плення його заданого значення r * на виході цього компаратора формується сигнал лог. "1", що надходить через логічний елемент "І" 29 на другий (R) вхід RS-тригера 28 і змінює вихідний сигнал даного тригера на лог. "0". У результаті цього ключ 30 розмикається і припиняє здійснювати обнуління заданого значення активної проекції I sy вектора статорного струму двигуна. Після цього на виході регулятора швидкості 31 формується необхідне значення даної проекції, і асинхронний електропривод розвиває необхідне значення обертового моменту та виходить на заданий режим роботи. Спосіб керування при провалі мережної напруги асинхронним електроприводом, який забезпечує його працездатність (з меншою продуктивністю) при зниженій мережній напрузі і реалізований у пристрої на Фіг.2, здійснюється аналогічно описаному раніше (на прикладі пристрою на Фіг.1) з наступними відмінностями. При провалі мережної напруги (U < U*) після зниження модуля вектора мережної напруги менш значення модуля вектора електрорушійної сили двигуна (U kEr) на виходах компаратора 22 і логічного елемента "І" 24 формуються сигнали лог. "0", у відповідності з якими на першому (S) вході RS-тригера 28 встановлюється сигнал лог. "0". При досягненні фактичним модулем r вектора пото козчеплення його заданого значення r на виході компаратора 37 встановлюється сигнал лог. "1". Таким чином на другий (R) вхід RS-тригера 28 через логічний елемент "І" 29 надходить сигнал лог. "1" за яким на виході згаданого RS-тригера 28 встановлюється сигнал лог. "0". При цьому ключ 30 (при наявності сигналу лог. "0" на своєму керуючому вході) розімкнеться і припинить обнуління активної проекції I*sy вектора статорного струму. Внаслідок чого електропривод розвиває необхідне значення обертового моменту і підтримує нове значення швидкості . Причому максимальна величина зазначеного нового значення швидкості обмежується за допомогою блока регульованого обмеження 46 на рівні г, який обчислюється у вигляді відношення модуля вектора мережної напруги до модуля вектора потокозчеплення двигуна: U , (6) Г z k r де = (1,04-1,06) - поправочний коефіцієнт, що враховує вплив ковзання двигуна; z - число пар полюсів двигуна 1. Для обмеження модуля завдання швидкості * двигуна при різних ії полярностях значення Г швидкості може бути визначене із залежності: U sign( *) , (7) Г z k r де sign - математична операція виділення знаку. При цьому згадане значення швидкості Г, яке обчислюється в задавачі граничної швидкості 47 із залежностей (6) або (7), відповідає максимальній (граничній) швидкості двигуна, що він може розвинути при фактичних значеннях модулів U та r векторів відповідно мережної напруги і потокозчеплення ротора двигуна, виходячи з фактичного запасу інвертора по вихідній напрузі. Запропонований спосіб керування призначений для застосування при неглибоких провалах мережної напруги, коли технологічний процес дозволяє працювати двигуну з меншою швидкістю, а отже - при зниженій продуктивності (наприклад, для відцентрових насосів та вентиляторів). Спосіб керування, який дозволяє забезпечити при провалі мережної напруги функціонування асинхронного електропривода в генераторному 13 режимі роботи двигуна і реалізований у пристрої на Фіг.3, здійснюється аналогічно описаному раніше (на прикладі пристрою на Фіг.1) з наступними відмінностями. У компараторі 51 з гістерезисною передатною функцією порівнюють значення вихідного струму випрямляча Іd з його установленням І**d рівним: І**d =2,2Idн, (8) де Idн - вихідний струм випрямляча 5, що відповідає номінальному режиму роботи двигуна 1. При нормальній мережній напрузі асинхронного електропривода на виході компаратора 51 та керуючому вході мультиплексора 48 присутні сигнали лог. "0". При цьому згаданий мультиплексор 48 передає відмикаючі імпульси для силових ключів 9-14 інвертора 3, що надходять від системи керування інвертором 34 і які відповідають штатному режиму роботи інвертора. При провалі мережної напруги і генераторному режимі роботи двигуна відбувається наростання вихідного струму Іd випрямляча 5 (що залежить від глибини провалу мережної напруги та розвинутої ЕРС двигуна). При перевищенні цим струмом його установлення I**d на виході компаратора 51 встановлюється сигнал лог. "1", який через логічний елемент "І" 50 надходить на керуючий вхід мультиплексора 48. Внаслідок цього даний мультиплексор 48 на свої виходи передає сигнали, що надходять від блоку формувачів імпульсів 49, відповідно до яких відмикаючі імпульси керування задаються тільки для незмінних двох силових ключів однієї із фаз інвертора. При цьому випрямлений струм Id, що протікає через два ключі однієї із фаз випрямляча 5, згладжуючий дросель 4 і два ключі однієї із фаз інвертора 3, зменшується по величині, розсіюючись у виді теплової енергії на згаданих елементах електропривода. У такий спосіб виключається одночасно обрив струму Id в ланці постійного струму (що приводить до аварійних перенапруг на силових ключах випрямляча и інвертора) та його наростання вище установлення I**d. Після спадання випрямленого струму Id менш значення його установлення 0,8I**d, на виході компаратора 51 встановлюється сигнал лог. "0", що через логічний елемент "І" 50 передається на керуючий вхід мультиплексора 48. При цьому відмикаючі імпульси керування для інвертора 3, які відповідають штатному режиму роботи електропривода, надходять через мультиплексор 48 від системи керування інвертором 34. Таким чином при провалі мережної напруги і генераторному режимі роботи двигуна 1 забезпечується безаварійна робота асинхронного електропривода шляхом відмикання двох силових ключів в анодній і катодній групах однієї із фаз інвертора 3. Спосіб керування при провалі мережної напруги асинхронним електроприводом, який забезпечує зменшення часу виходу асинхронного електропривода на заданий режим його роботи при відновленні мережної напруги і реалізований у пристрої на Фіг.4, здійснюється аналогічно описаному раніше (на прикладі пристрою на Фіг.1) з на 55778 14 ступними відмінностями. У компараторі 55 порівнюють модуль r вектора потокозчеплення двигуна з його установленням ним: r , наприклад рів (9) **=0,2 rн , де rн - номінальне значення модуля вектора потокозчеплення двигуна. При нормальній мережній напрузі асинхронноr го електропривода фактичне значення модуля r вектора потокозчеплення вище його установлення і на виході компаратора 55 присутній сигнал r лог. "0". При цьому мультиплексор 48 (відповідно до наявності сигналу лог. "0" на своєму керуючому вході) передає на свої виходи сигнали, що надходять від системи керування інвертором 34. При відновленні мережної напруги і зниженні модуля вектора потокозчеплення двигуна r менш значення його установлення r на виходах компаратора 55 і логічного елемента "І" 54, першому (S) вході RS-тригера 53 встановлюються сигнали лог. "1". Оскільки задане значення модуля r вектора потокозчеплення двигуна при роботі електропривода завжди перевищує задане уста новлення r , то, очевидно, на виході компаратора 37 (і, отже, на другому (R) вході RS-тригера 53) встановиться сигнал лог. "0". Внаслідок чого на виході RS-тригера 53 формується сигнал лог. "1", за яким мультиплексор 48 на свої виходи передає сигнали від блоку формувачів імпульсів 49, відповідно до яких відмикаючі імпульси керування надходять незмінно на один із силових ключів в анодній і один із силових ключів у катодній групі різних двох фаз трифазного інвертора 3. При досягненні поточним значенням модуля r вектора потокозчеплення двигуна його заданого значення r на виході компаратора 37 встановлюється сигнал лог. "1", що надходить на другий (R) вхід RS-тригера і змінює вихідний сигнал останнього на лог. "0". При цьому на керуючий вхід мультиплексора 48 надходить сигнал лог. "1", відповідно до якого даний мультиплексор 48 на свої виходи буде передавати імпульси керування, що надходять від системи керування інвертором 34 і які відповідають штатному режиму його роботи. При відновленні мережної напруги за рахунок попереднього прискореного насичення магнітного ланцюга двигуна (здійснюваного постійним струмом, що протікає через відкриті два силових ключа інвертора), гранично швидко наростає до заданого значення модуль вектора потокозчеплення r ротора двигуна. Таким чином скорочується час наступного виходу електропривода на заданий режим роботи. 15 55778 16 17 55778 18 19 55778 20 21 Комп’ютерна верстка Л. Купенко 55778 Підписне 22 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюControl method in case of main voltage depression using asynchronous electric motor with a three-phase autonomous inverter
Автори англійськоюVolkov Oleksandr Vasyliovych, Kosenko Ihor Oleksandrovych
Назва патенту російськоюСпособ управления при провале сетевого напряжения асинхронным электроприводом с трехфазным автономным инвертором
Автори російськоюВолков Александр Васильевич, Косенко Игорь Александрович
МПК / Мітки
МПК: H02H 3/00, H02P 21/00
Мітки: провалі, електроприводом, спосіб, автономним, мережної, асинхронним, напруги, трифазним, інвертором, керування
Код посилання
<a href="https://ua.patents.su/11-55778-sposib-keruvannya-pri-provali-merezhno-naprugi-asinkhronnim-elektroprivodom-z-trifaznim-avtonomnim-invertorom.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування при провалі мережної напруги асинхронним електроприводом з трифазним автономним інвертором</a>
Спосіб векторного регулювання струму в асинхронному електроприводі з трифазним автономним інвертором струму на тиристорах, що замикаються
Номер патенту: 30471
Опубліковано: 25.02.2008
Автори: Волков Олександр Васильович, Косенко Ігор Олександрович
МПК: H02P 7/00, H02P 21/00
Мітки: асинхронному, електроприводі, регулювання, трифазним, інвертором, струму, спосіб, замикаються, векторного, автономним, тиристорах
Формула / Реферат:
1. Спосіб векторного регулювання струму в асинхронному електроприводі з трифазним автономним інвертором струму на тиристорах, що замикаються, який полягає у тому, що задають необхідні значення намагнічувальної і активної проекцій узагальненого вектора статорного струму двигуна відповідно на осі абсцис і ординат ортогональної координатної системи, що обертається, яка орієнтована віссю абсцис за узагальненим вектором потокозчеплення ротора...
Спосіб керування автономним асинхронним генератором з короткозамкненим ротором
Номер патенту: 51704
Опубліковано: 26.07.2010
Автори: Романенко Володимир Іванович, Мазуренко Леонід Іванович
МПК: H02P 9/00
Мітки: генератором, короткозамкненим, керування, ротором, автономним, спосіб, асинхронним
Формула / Реферат:
Спосіб керування автономним асинхронним генератором з короткозамкненим ротором, що збуджується від вентильного перетворювача, при якому зовнішню характеристику формують зміною частоти цього перетворювача, який відрізняється тим, що зміну частоти здійснюють таким чином, що визначають положення робочої точки, аналізують її розміщення відносно лінії перемикання з жорсткої на крутоспадну ділянку характеристики, при знаходженні робочої точки над...
Пристрій керування трифазним асинхронним електродвигуном
Номер патенту: 75173
Опубліковано: 15.03.2006
Автор: Зінченко Євген Олександрович
МПК: H02P 1/26
Мітки: електродвигуном, керування, пристрій, трифазним, асинхронним
Формула / Реферат:
Пристрій керування трифазним асинхронним електродвигуном, фази статорної обмотки якого з'єднані в зірку, і кожна з них підключена до фаз живильної мережі через комутатор, виконаний за схемою безпосереднього перетворювача частоти, який відрізняється тим, що між комутатором і фазами статорної обмотки електродвигуна додатково введені електричні мости, кожний з яких складається із чотирьох послідовно з’єднаних у замкнений контур ключів, загальні...
Спосіб керування двофазним інвертором
Номер патенту: 28299
Опубліковано: 10.12.2007
Автор: Чернишев Аркадій Олексійович
Мітки: двофазним, спосіб, інвертором, керування
Формула / Реферат:
Спосіб керування двофазним інвертором, що включає здійснення ШІМ (широтно імпульсної модуляції) напруги, створення з двох однофазних мостів IGB-транзисторних модулів, який відрізняється тим, що імпульси вимкнення IGB-транзисторних модулів в одному з мостів виробляють у протифазі з імпульсами у другому мості.
Пристрій для керування асинхронним електроприводом
Номер патенту: 70074
Опубліковано: 15.09.2004
Автори: Кулік Анатолій Степанович, Нарожний Віталій Васильович, Гісцова Тетяна Іванівна, Фірсов Сергій Миколайович, Лученко Олег Олексійович
МПК: H02P 21/00
Мітки: асинхронним, пристрій, електроприводом, керування
Формула / Реферат:
Пристрій для керування асинхронним електроприводом, що складається з асинхронного двигуна, з'єднаного через пружну передачу з виконавчим механізмом, послідовно з'єднаних між собою регулятора швидкості, перетворювача координат і перетворювача енергії, вихід якого підключений до статорної обмотки асинхронного двигуна, датчика кута, механічно зв'язаного з ротором асинхронного двигуна, задатчика реактивного струму, вихід якого підключений до...
Попередній патент: Вібростійкий електронагрівач технологічного обладнання
Наступний патент: Мультимедійний навчальний клас
Випадковий патент: Пристрій для пресування предметів, а також прес високого тиску