Патенти з міткою «кінематичного»
Спосіб кінематичного аналізу механізму ііі класу

Номер патенту: 65203
Опубліковано: 25.11.2011
Автори: Алейнікова Наталія Василівна, Зубащенко Георгій Павлович, Корченко Олександр Григорович
МПК: F16H 21/00
Мітки: ііі, спосіб, класу, аналізу, кінематичного, механізму
Формула / Реферат:
1. Спосіб кінематичного аналізу механізму III класу, який полягає у знаходженні особливої точки, яка належить базисній ланці і визначається як точка перетину осей двох довільних повідків, який відрізняється тим, що до шатунної точки базисної ланки механізму III класу приєднують умовну ланку, яка не порушує степінь вільності зазначеного механізму.2. Спосіб за п. 1, який відрізняється тим, що кінематичний аналіз механізму III класу...
Спосіб кінематичного аналізу кулісного механізму
Номер патенту: 64834
Опубліковано: 25.11.2011
Автори: Корченко Олександр Григорович, Алейнікова Наталія Василівна, Зубащенко Георгій Павлович
МПК: F16H 21/00
Мітки: механізму, аналізу, кулісного, кінематичного, спосіб
Формула / Реферат:
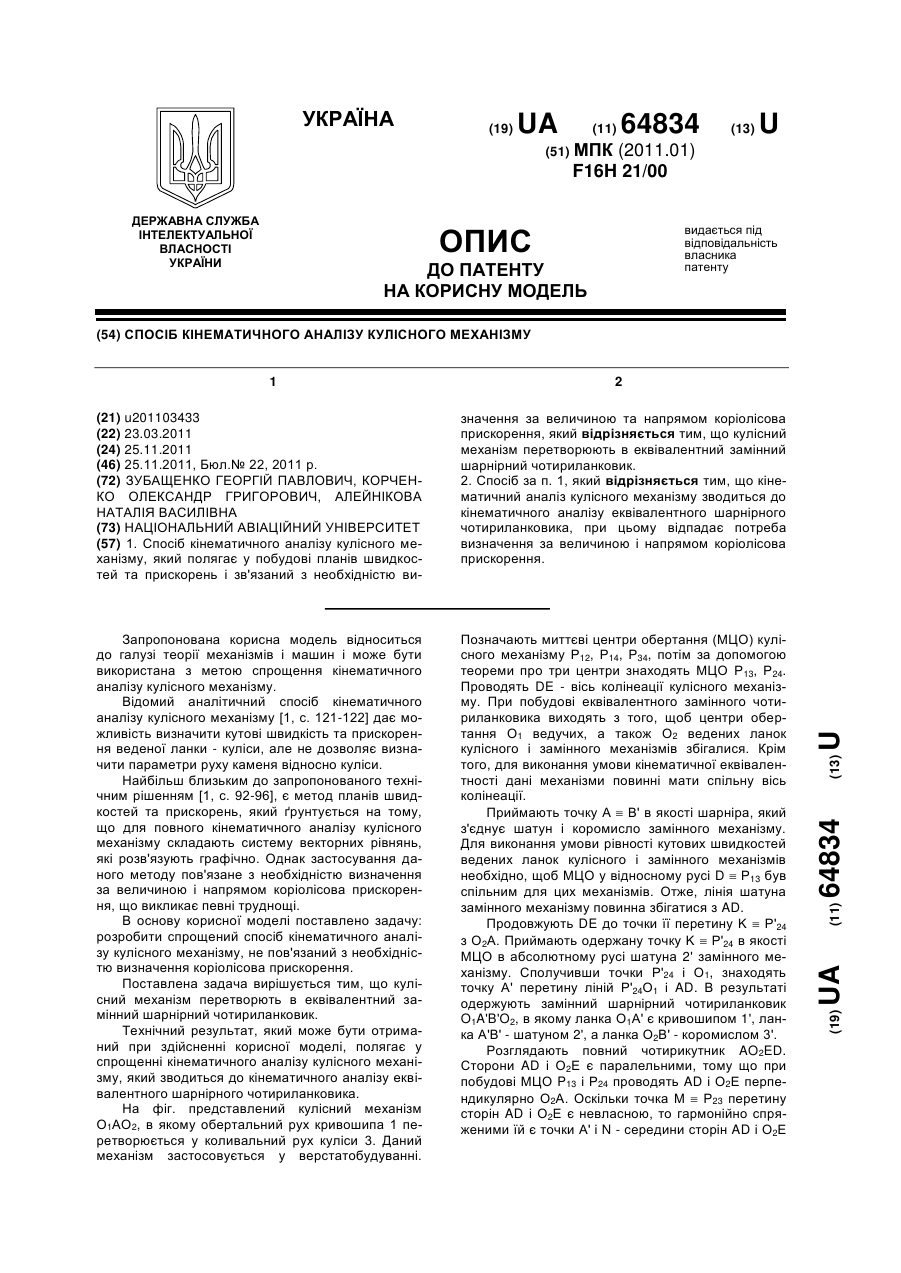
1. Спосіб кінематичного аналізу кулісного механізму, який полягає у побудові планів швидкостей та прискорень і зв'язаний з необхідністю визначення за величиною та напрямом коріолісова прискорення, який відрізняється тим, що кулісний механізм перетворюють в еквівалентний замінний шарнірний чотириланковик.2. Спосіб за п. 1, який відрізняється тим, що кінематичний аналіз кулісного механізму зводиться до кінематичного аналізу...
Спосіб об’єднаного використання локальної системи кррч (кінематичного режиму в реальному часі) та регіональної, широкозонної або глобальної системи позиціонування по фазі несучої
Номер патенту: 88896
Опубліковано: 10.12.2009
Автори: Хетч Рональд Р., Шарп Річард Т., Ян Юньчунь, Пікетт Терренс Д., Нельсон Фредерік В.
МПК: G01S 5/14
Мітки: системі, реальному, глобальної, позиціонування, об'єднаного, несучої, використання, фазі, кінематичного, регіональної, кррч, локальної, спосіб, часі, режиму, широкозонної
Формула / Реферат:
1. Спосіб визначення значення плаваючої неоднозначності, що відповідає вимірюванню фази несучої, одержаному користувачем супутникової системи позиціонування, основуючись на сигналах, що приймаються від одного з множини супутників, за яким визначають положення користувача, виконують обчислення теоретичної дальності від користувача до супутника, основуючись на положенні користувача, виконують обчислення початкового значення неоднозначності,...