Спосіб кінематичного аналізу кулісного механізму
Номер патенту: 64834
Опубліковано: 25.11.2011
Автори: Корченко Олександр Григорович, Алейнікова Наталія Василівна, Зубащенко Георгій Павлович

Формула / Реферат
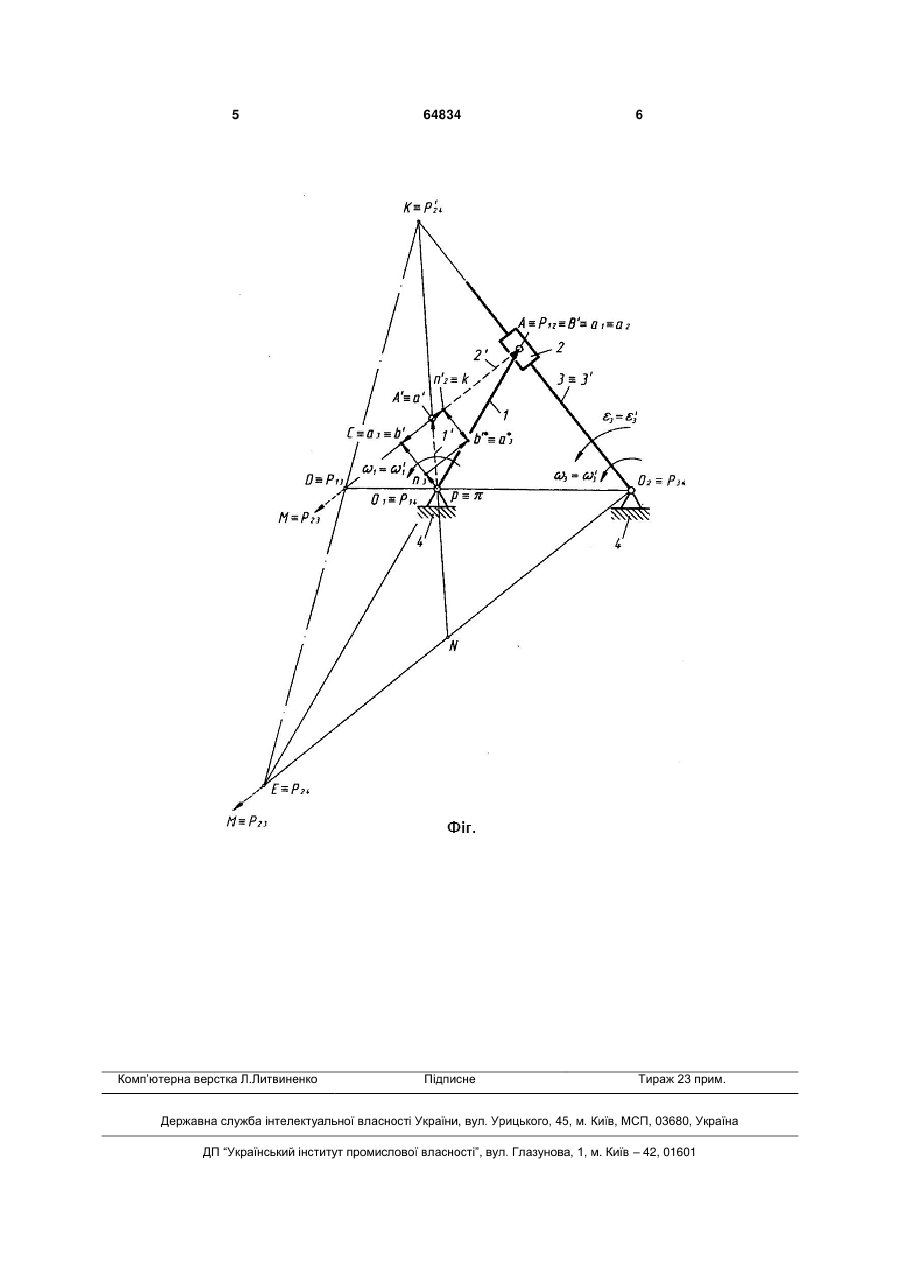
1. Спосіб кінематичного аналізу кулісного механізму, який полягає у побудові планів швидкостей та прискорень і зв'язаний з необхідністю визначення за величиною та напрямом коріолісова прискорення, який відрізняється тим, що кулісний механізм перетворюють в еквівалентний замінний шарнірний чотириланковик.
2. Спосіб за п. 1, який відрізняється тим, що кінематичний аналіз кулісного механізму зводиться до кінематичного аналізу еквівалентного шарнірного чотириланковика, при цьому відпадає потреба визначення за величиною і напрямом коріолісова прискорення.
Текст
1. Спосіб кінематичного аналізу кулісного механізму, який полягає у побудові планів швидкостей та прискорень і зв'язаний з необхідністю ви 3 64834 відповідно. Отже, діагональ КО1 ділить зазначені сторони навпіл: A'D = A'B', NE = NO2. Будують для кулісного механізму план швидкостей ра1а3 ра2а3 в масштабі 1 = const (в масштабі кривошипа, відкладеного в натуральну величину). Цей план повернутий на 90° в бік, протилежний напряму обертання ведучої ланки. В 4 прямом векторів VB V A 3 доходять висновку, що Після підстановки (3) в (1) одержують 43 (1 3 ) ka 2 AB . (4) 2 1 Довжина шатуна A B замінного механізму може бути визначена з виразу AB AC AC, (5) VA 2 A 3 де AC a3a2 . 1 Тоді з урахуванням (2) мають VA 2A 3 2 AB AB1 3 . (6) 1 1 Розв'язавши (6) відносно А'В', одержують VA 2 A 3 AB . (7) 2(1 3 ) Підставивши (7) у (4), отримують остаточно 23 VA 2A 3 ak A 2A 3 ka 2 , (8) 2 2 1 1 кутові швидкості 2 ланки 2 кулісного механізму і коромисла 3' замінного чотириланковика дорі3 2 тобто вектор ka 2 в масштабі 1 є дійсно вектором коріолісова прискорення. повернутому плані вектори pa1 pa2, pa3 , a3a2, являють собою відповідно повернуті на 90° вектори швидкостей V A1 V A 2 , V A 3 , V A2 A 3 . Будують для замінного шарнірного чотириланковика повернутий план швидкостей pa'b' в масштабі 1 = const. В даному повернутому плані вектори pa, ab, pb pa3 являють собою відповідно повернуті на 90° вектори швидкостей V A, VBA, VB V A 3 . На підставі рівності за величиною і збігу за на внюють одна одній: 2 . 3 Будують для замінного чотириланковика повернутий на 180° план прискорень an b * n3 в ма2 2 сштабі 1 . В даному повернутому плані вектори a, an , n b*, n3, n b * являють собою відповідно 2 2 3 вектори прискорень повернуті n t n t aA, aBA, aBA, aBO2 , aBO2 . 2 Фігура a2ka *3 n3 є в масштабі 1 планом прискорень кулісного механізму, повернутим на 180°. У цьому повернутому плані вектори * * a1 a2, a3 , n3a3 , a3k, ka 2 являють собою відповідно повернуті вектори прискорень n t r k aA1 aA 2 , aA3O2 , aA3O2 , aA 2O3 , aA 2O3 . Оскільки має місце рівність за величиною і збіг за напрямом t t Доводять, що вектор ka 2 на плані прискорень векторів прискорень aA 3O2 aBO2 , доходять ви 2 кулісного механізму є в масштабі 1 вектором коріолісова прискорення. Модуль цього вектора ka 2 AB an , (1) 2 го механізму і коромисла 3' замінного механіз3 де an 2 n aBA 2 1 2 VBA 2 AB 1 . Тут VBA ab 1 AC 1; AC AD CD AB CD. На підставі теореми про три центри можна записати CD O1D 3 , AD O2D 1 звідки CD AD 3 2 A B 3 . 1 1 Тоді 2 AC AB1 3 . (2) 1 Отже, VBA AB1 23 . В результаті мають 2 23 . an AB1 2 1 (3) сновку, що кутові прискорення 2 ланки 2 кулісному дорівнюють одне одному: 2 . 3 Отже, шарнірний чотириланковик О1А'В'О2 є еквівалентним у кінематичному відношенні замінним механізмом заданому кулісному механізму О1АВ. Як видно з фіг., довжина А'В' шатуна замінного 2 механізму дорівнює у масштабі 1 сумі модулів n нормального aBA прискорення замінного механіk зму і коріолісова aA 2 A3 прискорення кулісного механізму n aBA ak 2 A 3 A AB . (9) 2 1 В усіх положеннях кулісного механізму шатун А'В' замінного механізму утворює прямий кут з ланкою 2 кулісного механізму. Джерело інформації: 1. Артоболевский И.И. Теория механизмов. – М.: Наука, 1988. - 640 с. 5 Комп’ютерна верстка Л.Литвиненко 64834 6 Підписне Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for kinematical analysis of a link mechanism
Автори англійськоюZubaschenko Heorhii Pavlovych, Korchenko Oleksandr Hryhorovych, Aleinikova Natalia Vasylivna
Назва патенту російськоюСпособ кинематического анализа кулисного механизма
Автори російськоюЗубащенко Георгий Павлович, Корченко Александр Григорьевич, Алейникова Наталия Васильевна
МПК / Мітки
МПК: F16H 21/00
Мітки: кулісного, механізму, спосіб, аналізу, кінематичного
Код посилання
<a href="https://ua.patents.su/3-64834-sposib-kinematichnogo-analizu-kulisnogo-mekhanizmu.html" target="_blank" rel="follow" title="База патентів України">Спосіб кінематичного аналізу кулісного механізму</a>
Кулачок механізму приводу клапана високообертового двигуна внутрішнього згоряння

Номер патенту: 90955
Опубліковано: 10.06.2010
Автори: Астахова Ксенія Вікторівна, Мороз Володимир Ілліч, Братченко Олександр Васильович
МПК: F01L 1/08
Мітки: високообертового, кулачок, згоряння, двигуна, приводу, внутрішнього, механізму, клапана
Формула / Реферат:
Кулачок механізму приводу клапана високообертового двигуна внутрішнього згоряння, який має взаємодіючий із штовхачем профіль, що складається із з'єднаних з дугою початкового кола поверхонь підйому та опускання, кожна з яких описується кривою прискорень штовхача, що складається з двох сполучених ділянок, одна з яких виконана в області додатних значень і з'єднується з відрізком, що описує додатні прискорення штовхача на ділянці компенсації...
Застосування механізму хвильової зубчастої передачі як роторно-поршневого механізму двигуна внутрішнього згоряння
Номер патенту: 81022
Опубліковано: 26.11.2007
Автори: Мельничук Петро Петрович, Скочко Ярослав Євгенович, Скочко Євген Вікторович
МПК: F02B 55/00
Мітки: передачі, механізму, зубчастої, хвильової, застосування, роторно-поршневого, згоряння, двигуна, внутрішнього
Формула / Реферат:
Застосування механізму хвильової зубчастої передачі як роторно-поршневого механізму двигуна внутрішнього згоряння.
Спосіб роботи циліндричного механізму замка, циліндричний механізм замка та елемент замикання циліндричного механізму
Номер патенту: 70959
Опубліковано: 15.11.2004
Автор: Бабич Микола Сергійович
МПК: E05B 33/00
Мітки: механізму, механізм, циліндричного, спосіб, циліндричний, роботи, елемент, замикання, замка
Формула / Реферат:
1. Спосіб роботи циліндричного механізму замка, який складається із поворотного сердечника і водила, що включає радіальний рух водила, який відрізняється тим, що в пасивному стані поворотний сердечник встановлений з можливістю незалежного обертання навколо власної осі, а радіальний рух водила здійснюють, попередньо з'єднуючи останнє з поворотним сердечником, діючи спрямованим імпульсом на елемент замикання.2. Елемент замикання...
Спосіб визначення приведеного моменту інерції механізму
Номер патенту: 42988
Опубліковано: 15.11.2001
Автори: Поджаренко Андрій Володимирович, Кухарчук Василь Васильович, Кулаков Павел Ігоревич, Кучерук Володимир Юрійович
МПК: G01M 1/10
Мітки: визначення, інерції, приведеного, моменту, механізму, спосіб
Формула / Реферат:
Спосіб визначення приведеного моменту інерції механізму, який включає розгін механізму і перевод його в стан самогальмування з почерговою установкою на вихідний вал механізму двох зразкових моментів інерції, ідентичних за формою і відмінних по щільності матеріалу, з наступною реєстрацією інформативних параметрів і обчисленням приведеного моменту інерції, який відрізняється тим, що як інформативні параметри реєструють кутову швидкість у...
Спосіб аналізу, апарат для його здійснення (варіанти), касета для проведення аналізу (варіанти) і пристрій для проведення аналізу
Номер патенту: 74071
Опубліковано: 17.10.2005
Автори: Холтлунн Йостейн, Борк Стіг Мортен, Лаувстад Інгер Лісе, Карлсон Ян Рогер, Сейм Торстейн, Янсон Туре, Тьон Хеге
МПК: G01N 21/76, G01N 33/68, G01N 33/86, G01N 1/00, B01L 3/00, B01L 3/02, G01N 21/64, G01N 21/27, G01N 35/10, G01N 1/10, G01N 35/02, G01N 21/63
Мітки: варіанти, апарат, пристрій, проведення, касета, спосіб, здійснення, аналізу
Формула / Реферат:
1. Апарат для проведення аналізів, що містить піпетку, яка має ближній кінець та дальній кінець, джерело тиску газу, касету для проведення аналізів, яка містить принаймні одну комірку, та пристрій для проведення аналізів, який містить тримач згаданої касети, влаштований для її прийому, і детектор випромінювання, який відрізняється тим, що касета для проведення аналізів містить принаймні другу комірку та згадану піпетку, пристосовану до...
Попередній патент: Світлодіодний модуль
Наступний патент: Спосіб компресії бітових зображень на базі методів вагового кодування
Випадковий патент: Спосіб отримання багатоцільового імунорегулятора росту рослин (мир)