Слідкуючий гідропривід

Завантажити PDF файл.
Формула / Реферат
Следящий гидропривод, состоящий из исполнительного гидродвигателя, гидроусилителя и механизма обратной связи, отличающийся тем, что для повышения жесткости статических характеристик привода в выходных каналах гидроусилителя в направлении к исполнительному гидродвигателю установлены редукционные клапаны постоянного перепада давлений между линией питания и выходными каналами гидроусилителя, причем параллельно редукционным клапанам подключены обратные клапаны, закрытые к исполнительному гидродвигателю.
Текст
Изобретение относится к области систем гидравлических приводов. Известен следящий гидропривод [Федорец В.А., Педченко М.Н., Пичко А.Ф. и др. Гидроприводы и гидропневмоавтоматика станков. /Под ред. В.А.Федорца. - К.: Выща школа, 1987. - С. 159-170], взятый за прототип, который состоит из исполнительного гидродвигателя, гидроусилителя и механизма обратной связи. При стабильной нагрузке на выходное звено исполнительного гидродвигателя скорость слежения V и рассогласование d = X-Y между управляющим сигналом на гидроусилитель X и перемещением выходного звена Y практически однозначно определены между собой. Недостатком данной конструкции является то, что расход, поступающий от гидроусилителя к исполнительному гидродвигателю, зависит не только от рассогласования, но и от нагрузки на выходное звено. Поэтому, при заданном рассогласовании увеличение нагрузки приводит к уменьшению скорости слежения, а для необходимости поддержания требуемой скорости слежения при возрастании нагрузки следует увеличивать рассогласование. Отмеченные обстоятельства важны для гидравлических следящих систем, поскольку скорость слежения определяет быстродействие привода, а рассогласование - ошибку слежения. Целью изобретения является повышение жесткости статических характеристик привода. Поставленная цель достигается тем, что в известном следящем гидроприводе, состоящем из исполнительного гидродвигателя, гидроусилителя, механизма обратной связи, в выходных каналах гидроусилителя в направлении к исполнительному гидродвигателю установлены редукционные клапаны постоянного перепада давлений между линией питания и выходными каналами гидроусилителя, причем, параллельно редукционным клапанам подключены обратные клапаны, закрытые к исполнительному гидродвигателю. Принципиальная схема следящего гидропривода с жесткими статическими характеристиками приведена на чертеже. Следящий гидропривод содержит исполнительный гидродвигатель - гидроцилиндр 1, гидроусилитель 2, дросселирующий гидрораспределитель с золотником 3, механизм обратной связи 4, выполненный в виде жесткого механического соединения штока гидроцилиндра 1 с корпусом гидроусилителя 2, редукционные клапаны 5, 6 постоянного перепада давлений между линией питания 7 и выходными каналами 8, 9 гидроусилителя 2, установленные в направлении к гидроцилиндру 1. Параллельно редукционным клапанам 5, 6 подключены обратные клапаны 10, 11, закрытые к гидроцилиндру 1. Следящий гидропривод работает следующим образом. При подаче входного сигнала X на гидроусилитель 2 золотник 3 смещается от нейтрального положения, открывая дросселирующие щели, сообщающие полости гидроцилиндра 1 с линией питания 7 и слива 12. Вызванное разностью давлений перемещение Y штока гидроцилиндра 1 осуществляется до те х пор, пока механизм обратной связи 4 не восстановит нейтральное положение золотника в корпусе гидроусилителя 2. Подключение редукционных 5, 6 и обратных 10, 11 клапанов обеспечивает поддержание постоянного перепада давлений только на дросселирующей щели, открытой, для нагнетания жидкости. Поэтому расход в полость высокого давления гидроцилиндра 1, а следовательно и скорость движения его штока, будет зависеть, главным образом, от степени открытия дросселирующей щели, размер которой определяется только величиной рассогласования d = X-Y. Так как сжимаемость, утечки и перетечки рабочей жидкости в меньшей степени изменяют расходную характеристику регулирующего элемента, то в значительной мере исключается влияние нагрузки на скорость. Таким образом, повышается жесткость статических характеристик привода, при этом, скорость слежения и рассогласование (ошибка слежения) практически однозначно определяются между собой независимо от нагрузки.
ДивитисяДодаткова інформація
Назва патенту англійськоюTracking hydro-drive
Автори англійськоюSokolov Volodymyr Illich
Назва патенту російськоюСледящий гидропривод
Автори російськоюСоколов Владимир Ильич
МПК / Мітки
МПК: F15B 9/00
Мітки: слідкуючий, гідропривід
Код посилання
<a href="https://ua.patents.su/1-23347-slidkuyuchijj-gidroprivid.html" target="_blank" rel="follow" title="База патентів України">Слідкуючий гідропривід</a>
Електрогідравлічний слідкуючий привод
Номер патенту: 5700
Опубліковано: 28.12.1994
Автори: Канюк Генадій Іванович, Калінін Борис Петрович, Гапон Олександр Васильович, Пакулов Костянтин Миколайович
МПК: F15B 9/00
Мітки: електрогідравлічний, привод, слідкуючий
Формула / Реферат:
(57) Электрогидравлический следящий привод, содержащий последовательно соединенные задающий блок, сумматор, электронный усилитель, электрогидравлический усилитель, подключенный к исполнительному гидромеханизму, и датчик положения последнего, а также цепь отрицательной обратной связи по положению, включающую корректирующий блок для компенсации погрешности, вход которого соединен с датчиком положения, а выход - с сумматором, отличающийся тем,...
Електрогідравлічний слідкуючий привод
Номер патенту: 5062
Опубліковано: 28.12.1994
Автор: Пономаренко Анатолій Олександрович
МПК: F15B 9/00
Мітки: електрогідравлічний, привод, слідкуючий
Формула / Реферат:
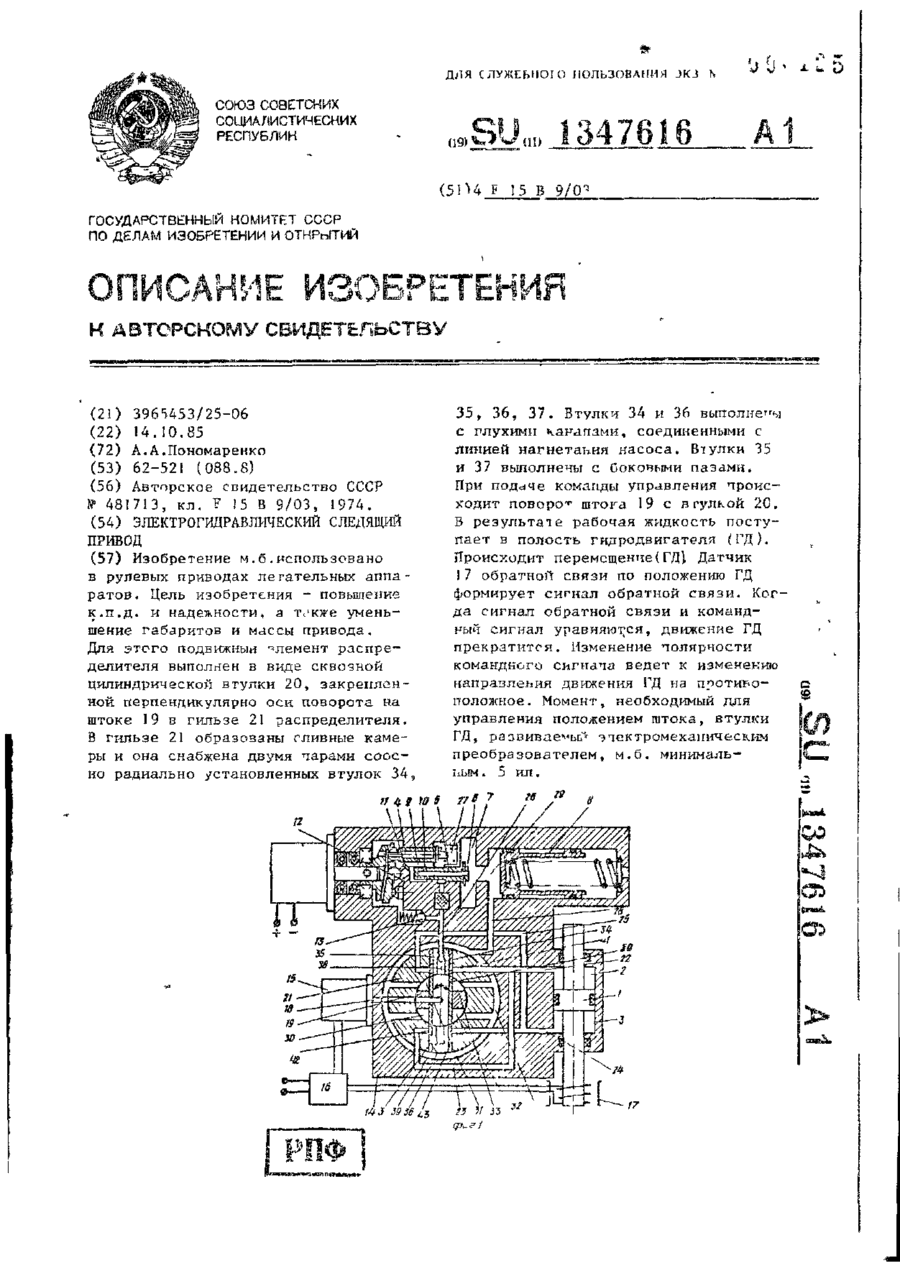
Электрогидравлический следящий привод, содержащий исполнительный гидродвигатель, насос регулируемой производительности и электрогидравлический усилитель, электромеханический преобразователь которого электрически связан с задатчиком и датчиком обратной связи исполнительного гидродвигателя и кинематически связан поворотным валом со штоком подвижного элемента распределителя, каналы гильзы которого подключены к линии нагнетания насоса, сливу...
Об’ємний гідропривід самохідної машини
Номер патенту: 22991
Опубліковано: 05.05.1998
Автор: Лютий Ігор Іванович
МПК: F15B 15/00
Мітки: об'ємний, машини, самохідної, гідропривід
Формула / Реферат:
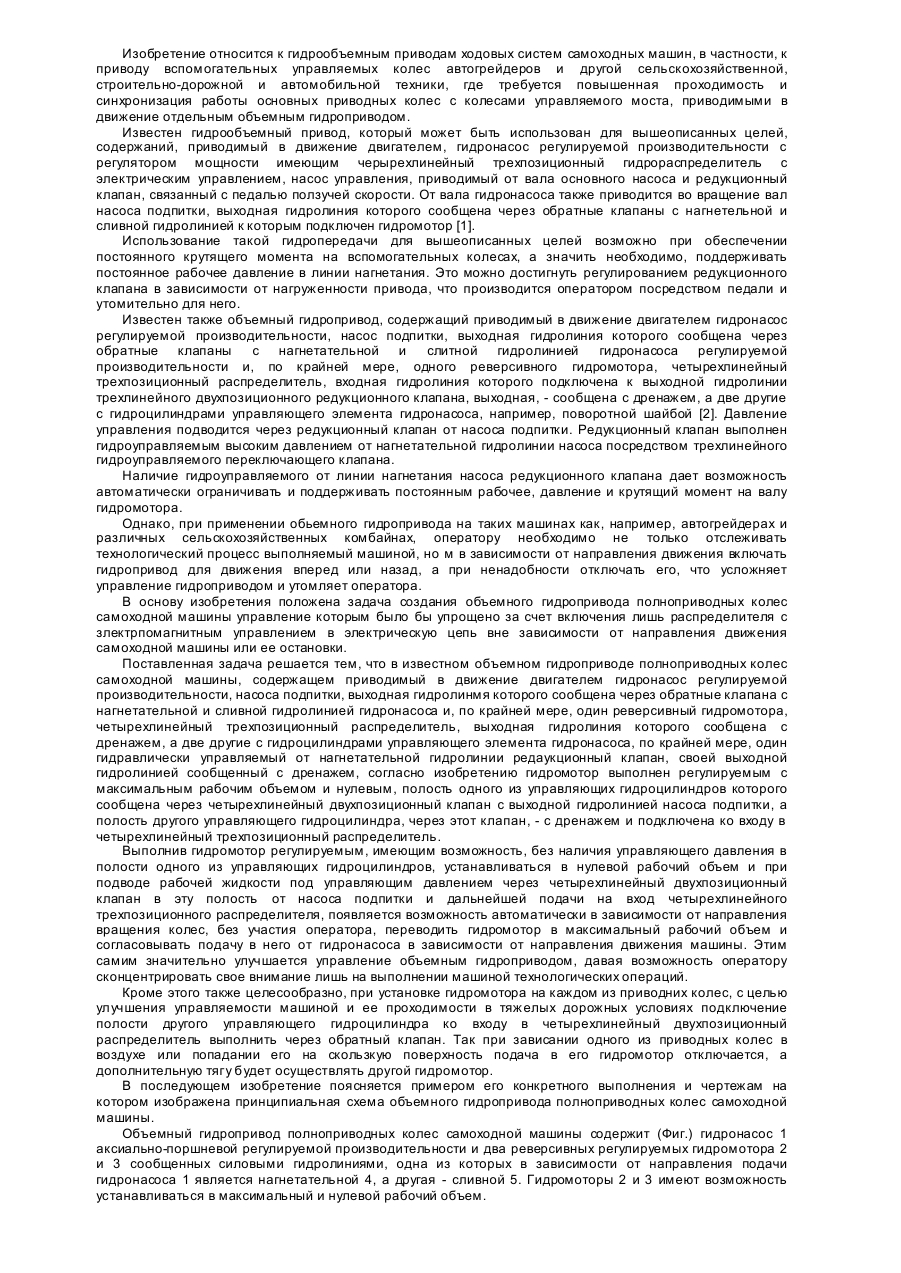
Объемный гидропривод самоходной машины, содержащий приводимый в движение двигателем гидронасос регулируемой производительности, насос подпитки, выходная гидролиния, которого сообщена через обратные клапаны с нагнетательной и сливной гидролинией гидронасоса и подключена к входной гидролинии четырехлинейного трехпозиционного распределителя, выходная гидролиния которого сообщена с дренажем, а две другие с гидроцилиндрами управляющего элемента...
Об’ємний гідропривід повноприводних коліс самохідної машини
Номер патенту: 20728
Опубліковано: 07.10.1997
Автори: Воронович Віктор Петрович, Гаркуша Анатолій Григорович, Плютін Іван Іванович, Забавін Олександр Альбертович, Приходько Володимир Іванович, Лютий Ігор Іванович
МПК: B60K 17/10
Мітки: машини, об'ємний, гідропривід, самохідної, коліс, повноприводних
Формула / Реферат:
Объемный гидропривод полноприводных колес самоходной машины, содержащий приводимый в движение двигателем гидронасос регулируемой производительности, насос подпитки, выходная гидролиния которого сообщена через обратные клапаны с нагнетательной и сливной гидролинией гидронасоса и подключена к входной гидролинии четырехлинейного трехпозиционного распределителя, выходная гидролиния которого сообщена с дренажом, а две другие с гидроцилиндрами...
Об’ємний гідропривід повноприводних коліс самохідної машини
Номер патенту: 23272
Опубліковано: 19.05.1998
Автори: Лютий Ігор Іванович, Плютін Іван Іванович, Гаркуша Анатолій Григорович, Корецький Іван Степанович, Воронович Віктор Петрович, Приходько Володимир Іванович
МПК: B60K 17/10
Мітки: об'ємний, самохідної, гідропривід, машини, повноприводних, коліс
Формула / Реферат:
1. Объемный гидропривод полноприводных колес самоходной машины, содержащий приводимый в движение двигателем гидронасос регулируемой производительности, насос подпитки, выходная гидролиния которого сообщена через обратные клапаны с нагнетательной и сливной гидролинией гидронасоса и, по крайней мере, одного реверсивного гидромотора, четырехлинейный трехпозиционный распределитель, выходная гидролиния которого сообщена с дренажем, а две другие -...
Попередній патент: Складаний опорно-руховий пристрій
Наступний патент: Слідкуючий гідропривід
Випадковий патент: Аеростатичний пристрій