Спосіб навігації для пілотної постановки дентальних імплантатів з використанням шаблонів
Номер патенту: 100041
Опубліковано: 10.07.2015
Автори: Штурмак Василь Миколайович, Білич Олег Єгорович, Когут Володимир Любомирович, Грекуляк Василь Васильович, Челій Олександр Іванович, Пантус Андрій Володимирович, Бігун Роман Михайлович, Білоус Орест Теодорович, Челій Світлана Теодозіївна

Формула / Реферат
Спосіб навігації для пілотної постановки дентальних імплантатів з використанням шаблонів, що включає попереднє сканування щелеп на конусній томографії (КТ) та наступне планування постановки дентальних імплантатів в комп'ютерній програмі із зняттям відбитку та виготовленням моделі з використанням комп'ютерної томографії і співставленням по орієнтирах, який відрізняється тим, що перед попереднім скануванням щелеп пацієнтові встановлюють в довільному шаховому порядку (вестибулярна, оральна поверхні та гребінь альвеолярного відростка) титанові піни, як такі використовують мікроімплантати/титанові мікрошурупи з внутрішньокістковою частиною для фіксації в кістці і шляпкою, що підвищується над рівнем слизової, кількість яких на всю щелепу вибирають в залежності від площі дефекту від 4 до 10, при цьому позиціонування титанових пін проводять з їх використанням як реперних пунктів, після сканування, не знімаючи титанові піни (репери), у пацієнта знімають відбиток та відливають гіпсову модель з відображенням шляпок пін (позакісткової частини пін), після чого піни забирають і на гіпсовій моделі свердлять канали, діаметром не менше 2 мм, кут та позицію яких вираховують з прив'язки до оклюзії, позиції майбутніх коронок зубів, сканують об'єкт оптичним сканером/томографом і, з отриманням відображеної поверхні об'єкта, в канали вставляють циліндри, відображають осі і співставляють в програмному забезпеченні дані КТ та дані скана гіпсової моделі в тривимірному просторі по шляпках пін (позакісткових частинах пін) з застосуванням цефалометричних віртуальних маркерів, отримують тривимірну реконструкцію кістки, рельєфу слизової, з рекомендованими осями імплантатів з прив'язкою до оклюзії, позиції майбутніх коронок зубів, рекомендовані осі співставляють з умовами кістки та визначають остаточну позицію імплантатів, після чого генерують шаблон з направляючими.
Текст
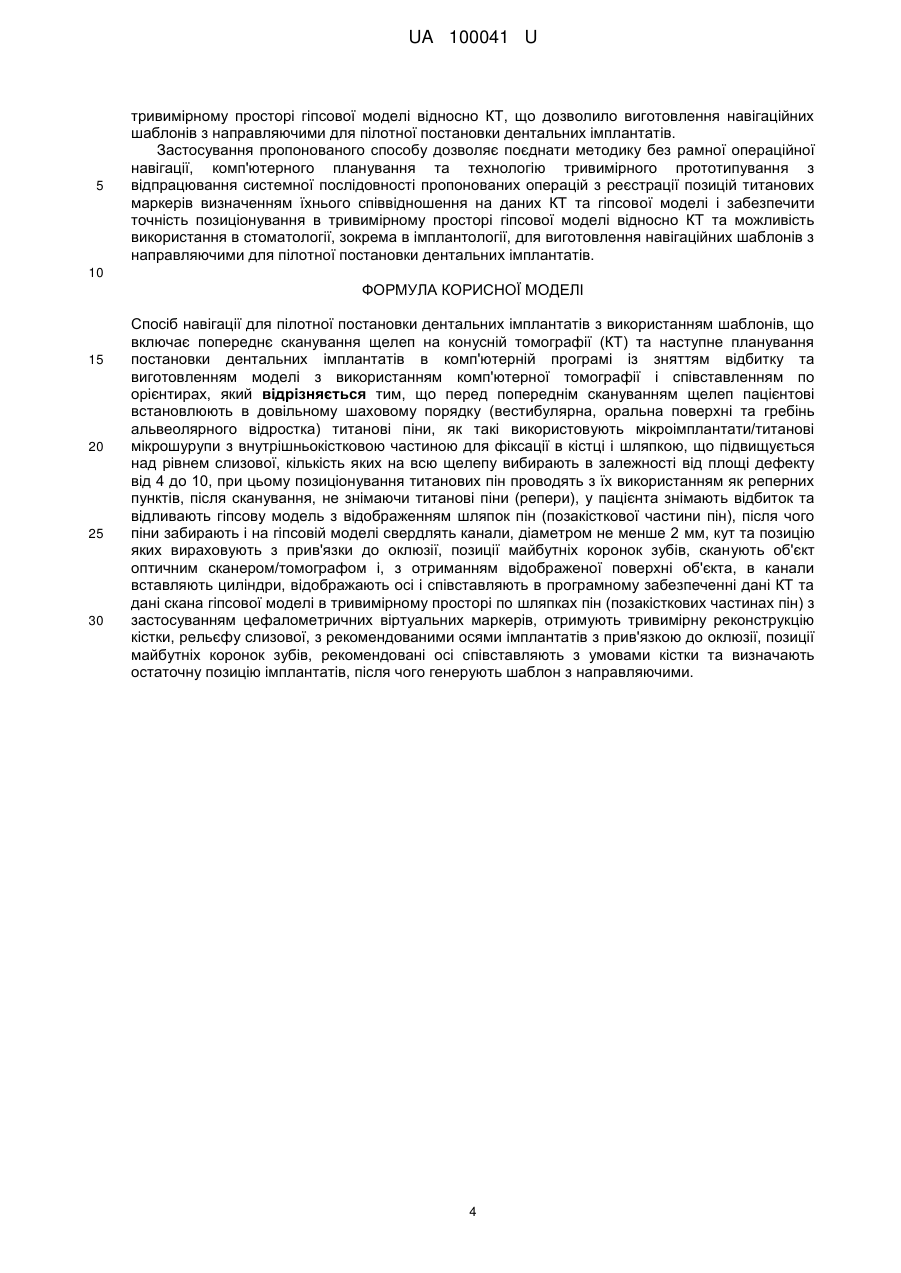
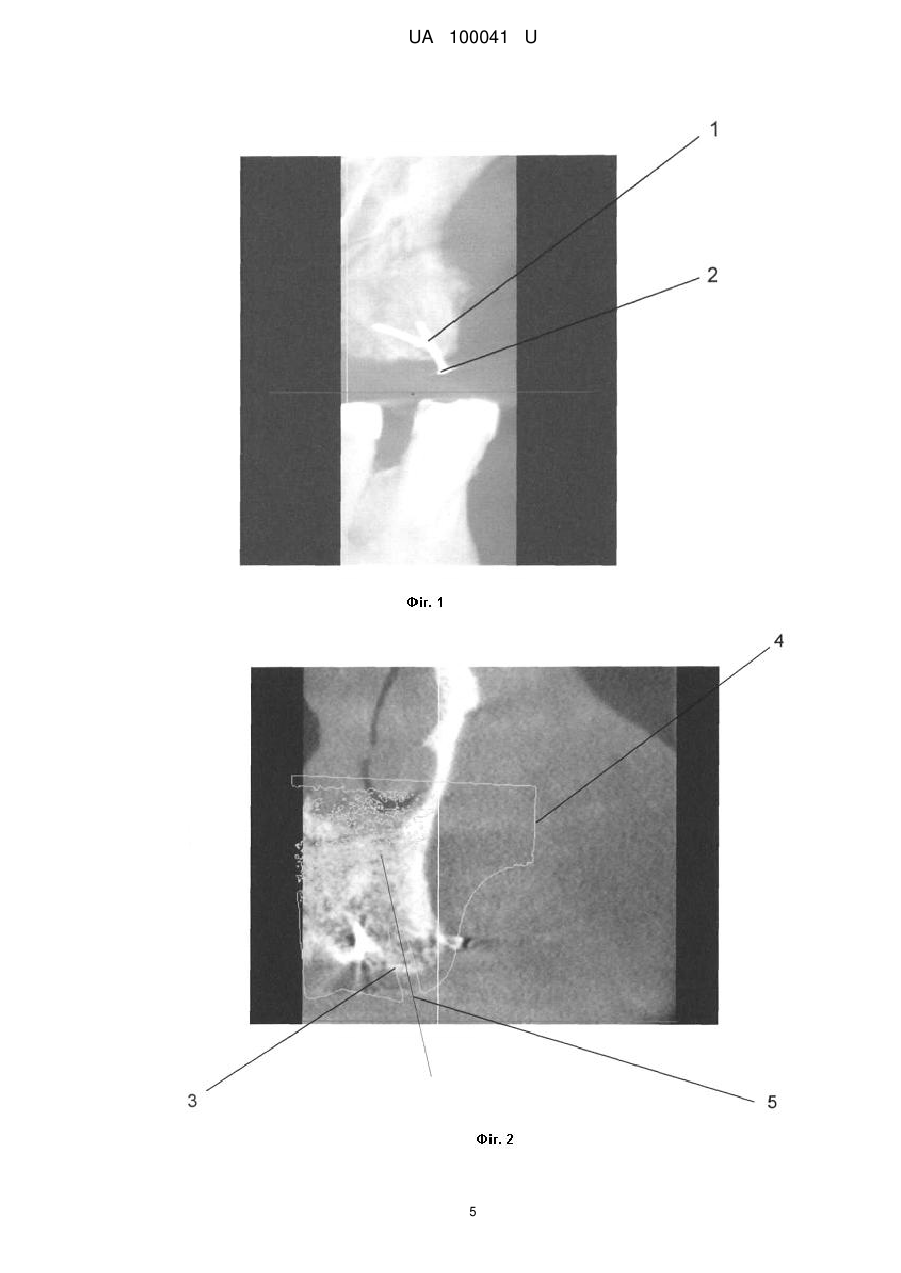
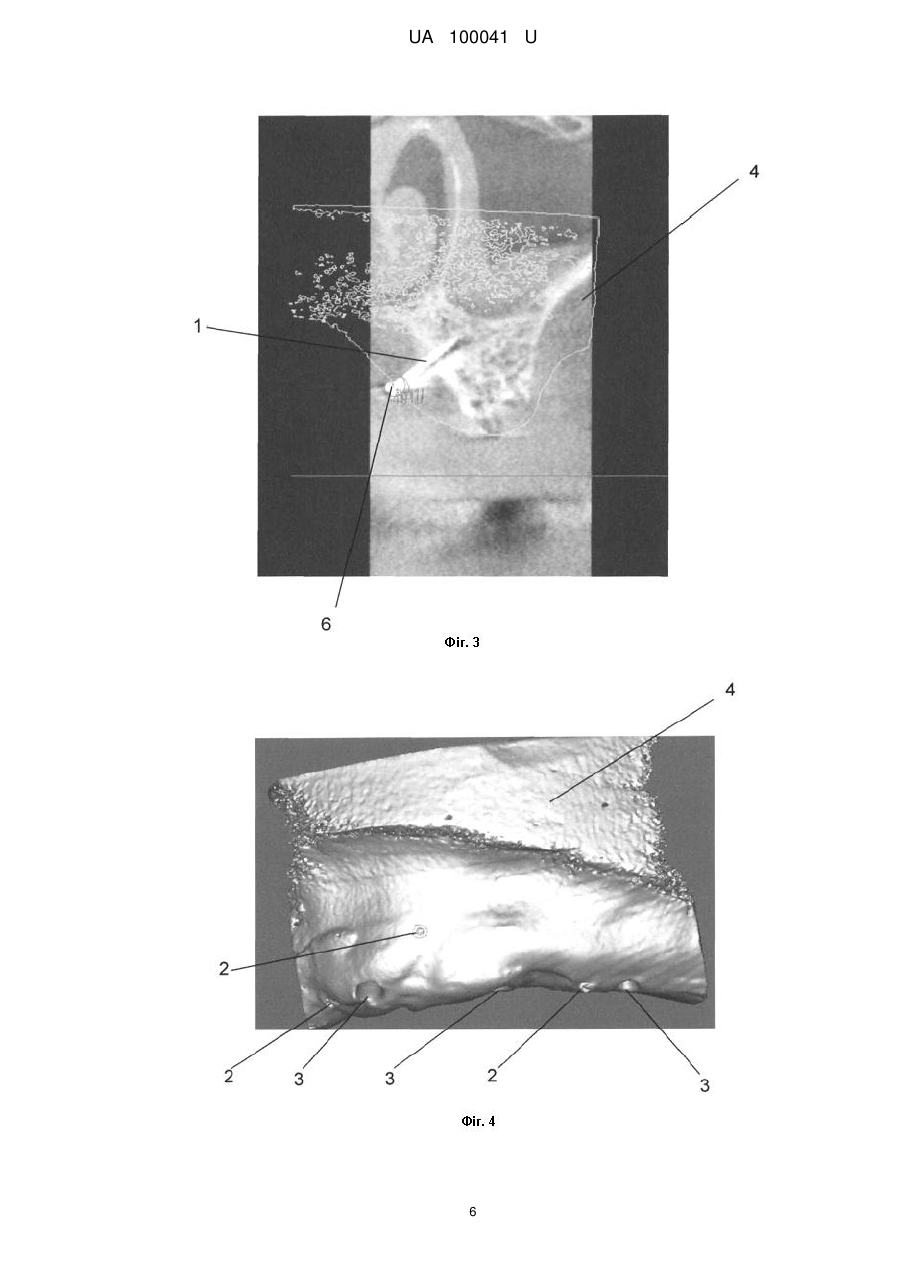
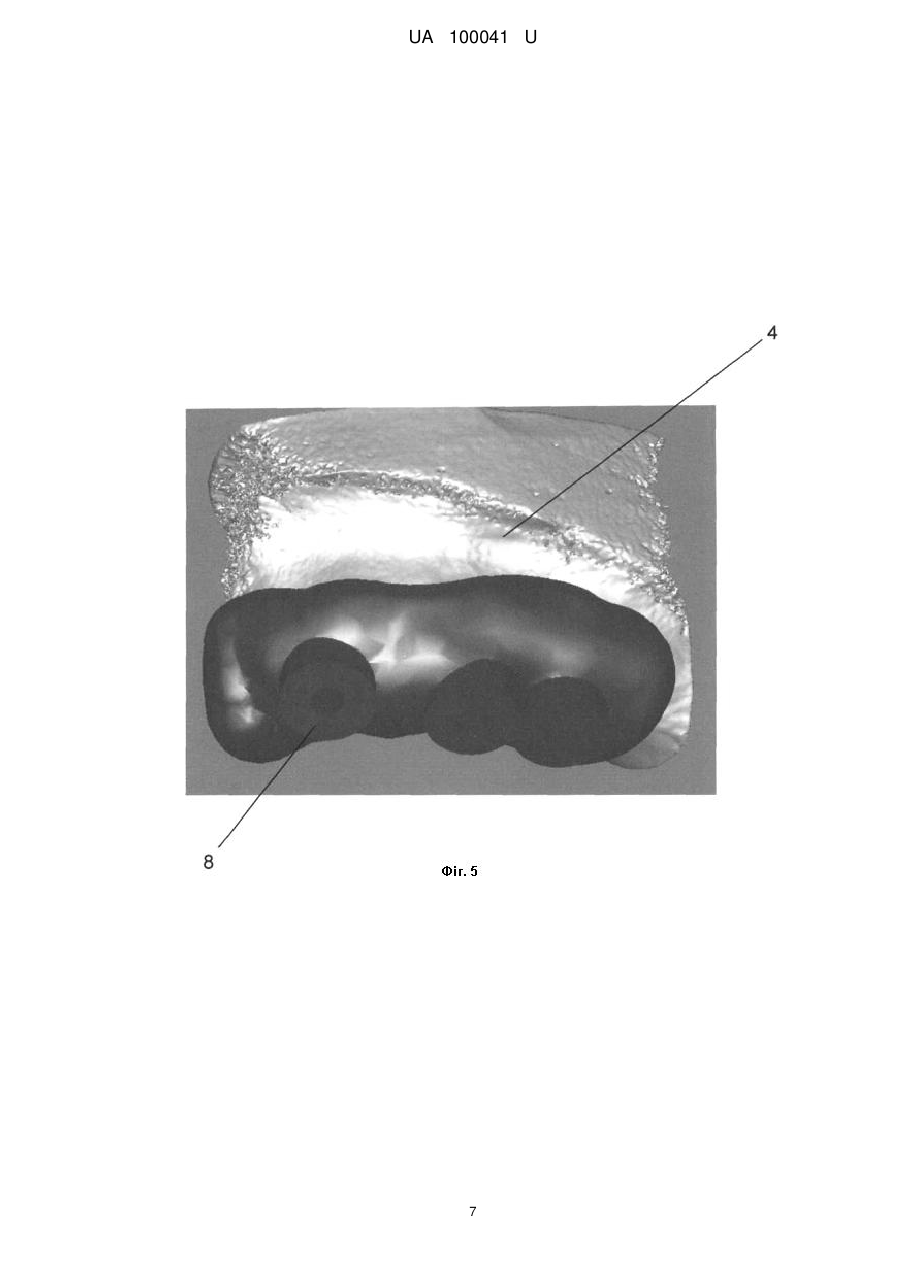
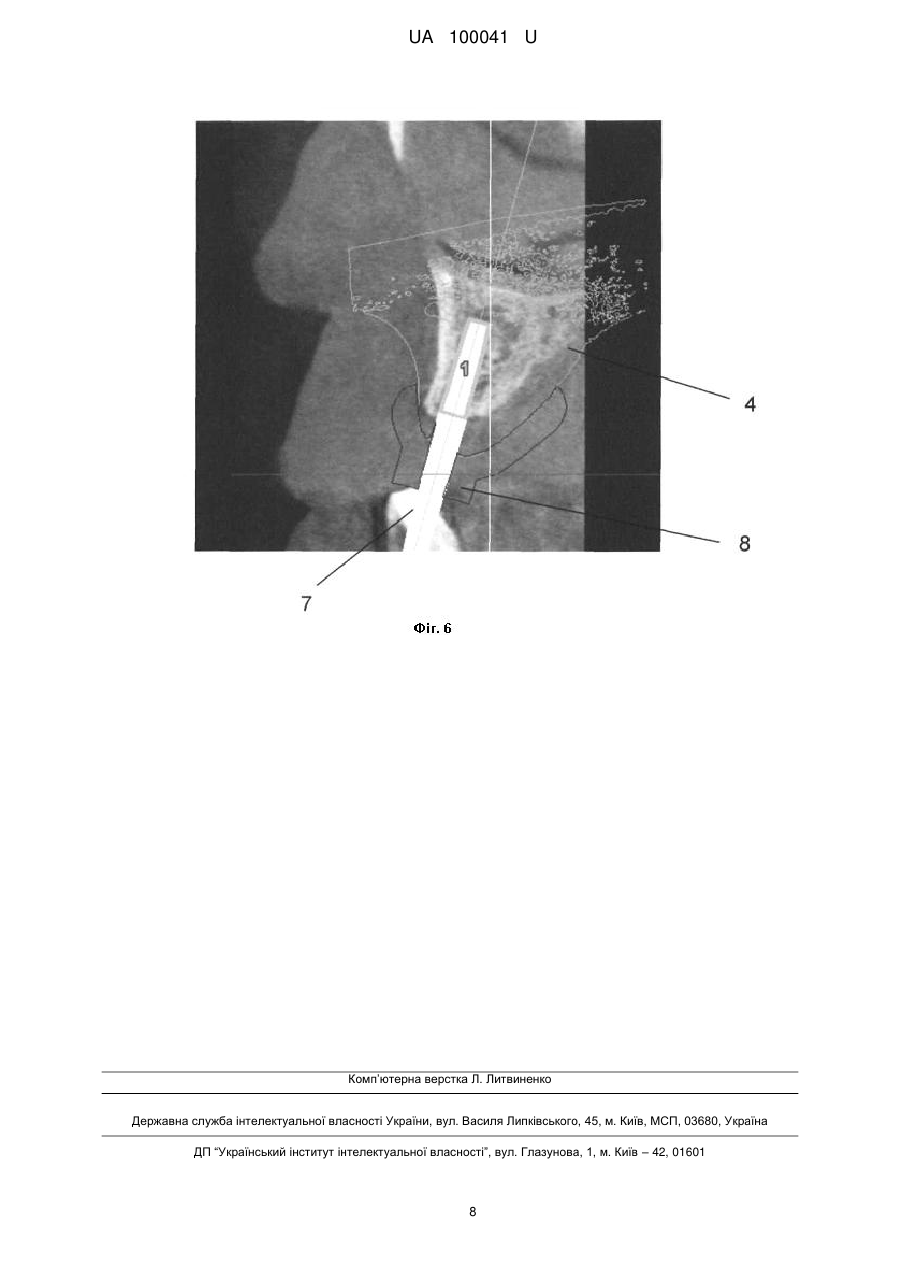
Реферат: Спосіб навігації для пілотної постановки дентальних імплантатів з використанням шаблонів включає попереднє сканування щелеп на конусній томографії (КТ) та наступне планування постановки дентальних імплантатів в комп'ютерній програмі із зняттям відбитку та виготовленням моделі з використанням комп'ютерної томографії і співставленням по орієнтирах. Перед попереднім скануванням щелеп пацієнтові встановлюють в довільному шаховому порядку (вестибулярна, оральна поверхні та гребінь альвеолярного відростка) титанові піни, як такі використовують мікроімплантати/титанові мікрошурупи з внутрішньокістковою частиною для фіксації в кістці і шляпкою, що підвищується над рівнем слизової, кількість яких на всю щелепу вибирають в залежності від площі дефекту від 4 до 10. Позиціонування титанових пін проводять з їх використанням як реперних пунктів, після сканування, не знімаючи титанові піни (репери), у пацієнта знімають відбиток та відливають гіпсову модель з відображенням шляпок пін (позакісткової частини пін), після чого піни UA 100041 U (12) UA 100041 U забирають і на гіпсовій моделі свердлять канали, діаметром не менше 2 мм, кут та позицію яких вираховують з прив'язки до оклюзії, позиції майбутніх коронок зубів, сканують об'єкт оптичним сканером/томографом і, з отриманням відображеної поверхні об'єкта, в канали вставляють циліндри, відображають осі і співставляють в програмному забезпеченні дані КТ та дані скана гіпсової моделі в тривимірному просторі по шляпках пін (позакісткових частинах пін) з застосуванням цефалометричних віртуальних маркерів, отримують тривимірну реконструкцію кістки, рельєфу слизової, з рекомендованими осями імплантатів з прив'язкою до оклюзії, позиції майбутніх коронок зубів, рекомендовані осі співставляють з умовами кістки та визначають остаточну позицію імплантатів, після чого генерують шаблон з направляючими. UA 100041 U 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до медицини, зокрема до хірургічної стоматології, а саме імплантології і може застосовуватися як для виготовлення навігаційних шаблонів для пілотної постановки дентальних імплантатів, так і для внутрішньоопераційної навігації. Відомий спосіб навігації для планування проведення дентальної імплантації з використанням системи Stealth Station TM ("Medtronic-Sofamor Danek", США), що включає попереднє сканування голови пацієнта і формування віртуальної (комп'ютерної) тривимірної моделі його голови на основі пакета даних КТ/МРТ, на поверхні якої заздалегідь намічають щонайменше 3 реперні точки (оптимально 8-11), які згодом розпізнають і локалізують як на КТ або МРТ зображеннях, так і на хворому, при цьому голову пацієнта щільно фіксують на операційному столі за допомогою жорсткої рами типу Mayfield (Codman), на якій фіксують "антену" (у номенклатурі Stealth - рама), кріплення якої конструктивно винесене за межі операційного поля і не перешкоджає хірургу під час операції і в яку вмонтовано п'ять інфрачервоних випромінювачів (LED-light emitting diode), з частотою 4 імпульси в секунду, які реєструють двома фотокамерами, розміщеними на переносному штативі або зафіксовані на стелі, крім того оперативну локалізацію маркерів і заздалегідь намічених анатомічних орієнтирів здійснюють спеціальним щупом, у рукоятці якого також вмонтовані інфрачервоні випромінювачі, і на підставі координат локалізованих точок формують ще одну віртуальну тривимірну модель і інтегрують її з наявним, побудованим на підставі КТ/МРТ зображенням, при цьому обидва ідентичних інструменти, що включають раму, щуп і їх кабелі, дозволяють роздільно використовувати їх у ході нестерильного (реєстрація) і стерильного (безпосередньо хірургічні маніпуляції) етапів операції [Navigational Surgery of the Facial Skeleton (Alexander Schram, NilsClaudius, Rainer Schmelreisen). Springer-Verlad. Berlin. Heidelberg, 2007. - С. 11-17, 154-158]. Однак такий спосіб є дорого вартісним і потребує спеціального обладнання, інструменти мають бути оснащені інфрачервоними випромінювачами, до того спосіб вимагає спеціальної передопераційної підготовки пацієнта, за добу або дві до втручання, і, як правило на практиці знаходить застосування тільки для супроводу та підтримки різноманітних краніальних та спінальних операцій, а також для застосування краніальної програми та при комбінованій патології додаткових пазух носа і передніх відділів основи черепа, і через високу вартість практично є недоцільним для застосування в стоматології, зокрема в імплантології, для виготовлення як навігаційних шаблонів з направляючими для пілотної постановки дентальних імплантатів, так і для внутрішньо операційної навігації. Відомі також методики тривимірного прототипування та фрезерування, що дозволяють відтворити в шаблоні направляючі канали, які в свою чергу дозволять в точності відтворити позицію імплантатів, розраховану на комп'ютері, серед яких технологія лазерної стерео літографії (SLA), заснована на фото ініційованій лазерним випромінюванням або випромінюванням ртутних ламп полімеризації фото полімерної композиції (ФПК), за якою спроектований на комп'ютері тривимірний об'єкт вирощують з рідкої ФПК послідовними тонкими (0,1-0,2 мм) шарами, формованими під дією лазерного випромінювання на рухомій платформі, зануреній у ванну з ФПК [Navigational Surgery of the Facial Skeleton (Alexander Schram, NilsClaudius, Rainer Schmelreisen). Springer-Verlad. Berlin. Heidelberg, 2007, с. 18-22]. Однак ця відома лазерна стерео літографія (SLA), хоч і дозволяє в найкоротші терміни (від декількох годин до декількох днів) пройти шлях від конструкторської/дизайнерської ідеї до готової моделі деталі, як і інші способи 3D - прототипування, вимагає зведення підтримуючих структур, які вручну видаляють по завершенні побудови моделі і які зазвичай мають високу вартість витратного матеріалу, що є одноразовим для пацієнта. Найбільш близьким до корисної моделі є спосіб планування постановки імплантатів з послідуючим виготовленням шаблона, який полягає в тому, що попередньо сканують ділянку дефекту на спіральному комп'ютерному томографі, позиціонують в програмі імплантат в правильне положення, після чого знімають відбиток та відливають гіпсову модель, модель сканують оптичним сканером і співставляють по зубах (орієнтирах) з даними комп'ютерної томографії, після чого генерують та виготовляють шаблон з направляючими на слизову з опорою на зубний ряд [Spring Case: Maxillary Anterior Implant Case-Joseph Steele, DMD and Phillip VanMeter, DMD, www.materialisedental.com]. Однак таку методику можна застосовувати тільки для часткових дефектів зубного ряду, оскільки зуби є орієнтиром (своєрідними реперами) при співставленні скана гіпсової моделі та даних комп'ютерної томографії. При повній адентії не можливо співставити вище вказані моделі без виготовлення шаблона з опорою на альвеолярний гребінь. Такий підхід не є оправданий, оскільки під час операції потрібно скелетувати для посадки шаблона досить велику ділянку та коригувати шаблон під час операції, а це в свою чергу затягує час операції і призводить до більшого травматизму. Крім цього використання скан-протезу також не є оправданим через 1 UA 100041 U 5 10 15 20 25 30 35 40 45 50 55 60 розхід матеріалів, неможливість в точності перенести дані КТ на скан-протез та відсутність можливості у всіх пацієнтів стабілізувати його в роті під час сканування, що може призвести до похибки. В основу винаходу поставлена задача створення нового ефективного і простого способу навігації для планування проведення дентальної імплантації з використанням шаблонів шляхом поєднання методик без рамної операційної навігації, комп'ютерного планування та технології тривимірного прототипування з відпрацюванням системної послідовності пропонованих операцій з реєстрації позицій титанових маркерів, визначенням їхнього співвідношення за даними КТ та гіпсової моделі і підвищенням точності позиціонування в тривимірному просторі гіпсової моделі відносно КТ забезпечити можливість застосування в стоматології, зокрема в імплантології, виготовлення навігаційних шаблонів з направляючими для пілотної постановки дентальних імплантатів, в тому числі і при повній адентії. Поставлена задача вирішується тим, що за способом навігації для пілотної постановки дентальних імплантатів з використанням шаблонів, що включає попереднє сканування щелеп на конусній томографії (КТ) та наступне планування постановки дентальних імплантатів в комп'ютерній програмі із зняттям відбитку та виготовленням моделі з використанням комп'ютерної томографії і співставленням по орієнтирах, згідно з корисною моделлю, перед попереднім скануванням щелеп пацієнтові встановлюють в довільному шаховому порядку (вестибулярна, оральна поверхні та гребінь альвеолярного відростка) титанові піни, як такі використовують мікроімплантати і/або титанові мікрошурупи з внутрішньо кістковою частиною для фіксації в кістці і шляпкою, що підвищується над рівнем слизової, кількість яких на всю щелепу вибирають в залежності від площі дефекту від 4 до 10, при цьому позиціонування титанових пін проводять з їх використанням як реперних пунктів, після сканування, не знімаючи титанові піни (репери), у пацієнта знімають відбиток та відливають гіпсову модель з відображенням шляпок пін (поза кісткової частини пін), після чого піни забирають і на гіпсовій моделі свердлять канали, діаметром не менше 2 мм, кут та позицію яких вираховують з прив'язки до оклюзії, позиції майбутніх коронок зубів, сканують об'єкт оптичним сканером/томографом і, з отриманням відображеної поверхні об'єкта, в канали вставляють циліндри, відображають осі і співставляють в програмному забезпечені дані КТ та дані скана гіпсової моделі в тривимірному просторі по шляпках пін (позакісткових частинах пін) з застосуванням цефалометричних віртуальних маркерів, отримують тривимірну реконструкцію кістки, рельєфу слизової, з рекомендованими осями імплантатів з прив'язкою до оклюзії, позиції майбутніх коронок зубів, рекомендовані осі співставляють з умовами кістки та визначають остаточну позицію імплантатів, після чого генерують шаблон з направляючими. Шахова позиція пін (реперів) забезпечує чітке співставлення скану гіпсової моделі та даних КТ з розрахунку три точки в трьох різних осях "XYZ". Попереднє сканування з титановими пінами вибраної ділянки щелепи здійснюють на спіральному комп'ютерному томографі з перенесенням даних комп'ютерної томографії в програмне забезпечення, як приклад SimPlant Pro 11.04. Саме поза кісткові частини пін дозволять точно співставити скан гіпсової моделі та КТ, висвердлити канали на гіпсовій моделі, діаметром не менше 2 мм, вирахувати кут та позицію з прив'язкою до оклюзії, позиції майбутніх коронок зубів. Сканування оптичним сканером/томографом дозволяє точно відобразити поверхню об'єкта, а вставлені в канали циліндри - відобразити рекомендовані осі імплантатів і далі в програмному забезпеченні спів ставити дані КТ та дані скана гіпсової моделі в тривимірному просторі по шляпках пін (поза кісткових частинах пін), з застосуванням цефалометричних віртуальних маркерів. Таким чином, отримавши тривимірну реконструкцію кістки, рельєфу слизової з рекомендованими осями імплантатів з прив'язкою до позиції майбутніх коронок зубів, тобто до оклюзії, отримують можливість спів ставити рекомендовані осі з умовами кістки та визначити остаточну позицію імплантатів, після чого генерувати шаблон з направляючими. Розрахувавши шаблон, як приклад, під два типи свердла, діаметром 2 і 2,8 мм, і задавши в програмі отвори в шаблоні з розрахунку до 3,3 мм, після чого, роздрукувавши шаблон на тривимірному принтері, і з урахуванням того, що внутрішній діаметр та висота металевих гільз, котрі вставляють в шаблон, іде з розрахунку від 5 до 7 мм висоти, 2,2 мм внутрішній діаметр та 3,0 мм зовнішній діаметр, телескопічним методом зі знімним металевим циліндром контролюють позицію свердла двох пріоритетних діаметрів протягом всієї операції, уникаючи ризику зміни напрямку при заміні діаметра без шаблона. Таким чином, отримано новий спосіб шляхом поєднання методик безрамної операційної навігації, комп'ютерного планування та технології тривимірного прототипування відпрацюванням системної послідовності пропонованих операцій з реєстрації позицій титанових 2 UA 100041 U 5 10 15 20 25 30 35 40 45 50 55 маркерів і визначенням їхнього співвідношення за даними КТ та гіпсової моделі з точним позиціонуванням в тривимірному просторі гіпсової моделі відносно КТ, котрий забезпечує можливість застосування в стоматології, зокрема в імплантології, для виготовлення навігаційних шаблонів з направляючими для пілотної постановки дентальних імплантів, в тому числі і при повній адентії, тобто маємо комплексне технічне рішення, достатнє для вирішення поставленої задачі корисної моделі. Суть способу виготовлення навігаційних шаблонів з направляючими для постановки дентальних імплантатів пояснюють фігури 1-6. Спосіб здійснюють так. Приклад. Пацієнт Б. 60 р. звернувся в клініку хірургічної стоматології з діагнозом повна адентія верхньої щелепи з метою протезування. На основі даних об'єктивного обстеження та рентгенологічних даних прийнято рішення про постановку дентальних імплантатів в ділянках відсутніх 11, 14, 16 та 21, 24, 26 зубів. Для планування проведення дентальної імплантації пацієнтові перед попереднім скануванням встановили в довільно шаховому порядку (вестибулярна, оральна поверхні та гребінь альвеолярного відростка) титанові піни, як такі вибрали мікроімпланти/титанові мікрошурупи з внутрішньокістковою частиною для фіксації в кістці і шляпкою, що підвищувалась над рівнем слизової, кількістю пін на всю щелепу, як приклад з урахуванням площі дефекту в кількості 8. Позиціонування здійснили з їх використанням як реперних пунктів. Шаховою позицією пін (реперів) забезпечили чітке співставлення скана гіпсової моделі та даних КТ з розрахунку три точки в трьох різних осях "XYZ". Попереднє сканування з титановими пінами вибраної ділянки щелепи здійснили на спіральному комп'ютерному томографі Veraviewepocs фірми Morita з перенесенням даних комп'ютерної томографії в програмне забезпечення SimPlant Pro 11.04. Дані спіральної комп'ютерної томографії з титановими пінами, поз. 1, наведені на Фіг. 1. Після сканування, не знімаючи титанові піни (репери) 1, у пацієнта зняли відбиток та відлили гіпсову модель з відображеними шляпками пін (позакісткової частини пін) 2, після чого піни (1) у пацієнта забрали. Далі на гіпсовій моделі (2) просвердлили канали 3, діаметром 2 мм, кут та позицію яких ортопед-стоматолог вирахував з прив'язки до оклюзії, тобто до позиції майбутніх коронок зубів і засканував томографом. Скан гіпсової моделі 4 з рекомендованою ортопедом віссю імпланта 5 наведено на Фіг. 2. Після цього дані КТ та дані скана гіпсової моделі 4 співставили в програмному забезпечені в тривимірному просторі по шляпках пін (позакісткових частинах пін) 2, з застосуванням цефалометричних віртуальних маркерів 6. Дані спіральної комп'ютерної томографії зі співставленими титановими пінами гіпсової моделі та даними КТ наведені на Фіг. 3 і дані спіральної комп'ютерної томографії зі співставленими титановими пінами скана гіпсової моделі 4 та даних КТ наведені на Фіг. 4. Таким чином, було отримано тривимірну реконструкцію кістки, рельєфу слизової з рекомендованими осями імплантатів 5 з прив'язкою до позиції майбутніх коронок зубів, тобто до оклюзії. Рекомендовані осі 5 співставили з умовами кістки та визначили остаточну позицію імплантатів. Після чого генерували шаблон з направляючими 8. Скан гіпсової моделі 4 та відмодельований на комп'ютері шаблон з направляючими 8 наведено на Фіг. 5 і дані КТ, скан гіпсової моделі 4 та відмодельований на комп'ютері шаблон з направляючими 8 зі встановленим імплантатом 7 наведені на Фіг. 6. З розрахунку під два типа свердла (діаметром 2 та 2,8 мм) в програмі задали отвори в шаблоні до 3,3 мм, після чого шаблон 8 роздрукували на тривимірному принтері. Внутрішній діаметр та висоту металевих гільз (на фіг. не наведено) в шаблон вибрали з розрахунку від 5 до 7 мм висотою з внутрішнім діаметром 2,2 мм та 3,0 мм зовнішнім діаметром. Телескопічним методом зі знімним металевим циліндром контролювали позицію свердла двох пріоритетних діаметрів на протязі всієї операції, уникаючи ризику зміни напрямку при заміні діаметра без шаблона. Таким чином, завдяки запропонованій системній послідовності операцій, зокрема попередньому скануванню вибраної ділянки щелепи та гіпсових моделей з титановими пінами (реперами) на спіральному комп'ютерному томографі з перенесенням отриманих даних в програмне забезпечення, в якому по титанових пінах точно співставили дані КТ та скан гіпсової моделі під наперед визначеним кутом з прив'язкою до оклюзії, і завдяки наперед просвердленим каналам в гіпсовій моделі та з урахуванням умов кісткової тканини, позиціонували імплантати, отримавши при цьому об'ємну реконструкцію кісткової тканини та слизової оболонки ротової порожнини, при цьому було забезпечено точність позиціонування в 3 UA 100041 U 5 тривимірному просторі гіпсової моделі відносно КТ, що дозволило виготовлення навігаційних шаблонів з направляючими для пілотної постановки дентальних імплантатів. Застосування пропонованого способу дозволяє поєднати методику без рамної операційної навігації, комп'ютерного планування та технологію тривимірного прототипування з відпрацювання системної послідовності пропонованих операцій з реєстрації позицій титанових маркерів визначенням їхнього співвідношення на даних КТ та гіпсової моделі і забезпечити точність позиціонування в тривимірному просторі гіпсової моделі відносно КТ та можливість використання в стоматології, зокрема в імплантології, для виготовлення навігаційних шаблонів з направляючими для пілотної постановки дентальних імплантатів. 10 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 25 30 Спосіб навігації для пілотної постановки дентальних імплантатів з використанням шаблонів, що включає попереднє сканування щелеп на конусній томографії (КТ) та наступне планування постановки дентальних імплантатів в комп'ютерній програмі із зняттям відбитку та виготовленням моделі з використанням комп'ютерної томографії і співставленням по орієнтирах, який відрізняється тим, що перед попереднім скануванням щелеппацієнтові встановлюють в довільному шаховому порядку (вестибулярна, оральна поверхні та гребінь альвеолярного відростка) титанові піни, як такі використовують мікроімплантати/титанові мікрошурупи з внутрішньокістковою частиною для фіксації в кістці і шляпкою, що підвищується над рівнем слизової, кількість яких на всю щелепу вибирають в залежності від площі дефекту від 4 до 10, при цьому позиціонування титанових пін проводять з їх використанням як реперних пунктів, після сканування, не знімаючи титанові піни (репери), у пацієнта знімають відбиток та відливають гіпсову модель з відображенням шляпок пін (позакісткової частини пін), після чого піни забирають і на гіпсовій моделі свердлять канали, діаметром не менше 2 мм, кут та позицію яких вираховують з прив'язки до оклюзії, позиції майбутніх коронок зубів, сканують об'єкт оптичним сканером/томографом і, з отриманням відображеної поверхні об'єкта, в канали вставляють циліндри, відображають осі і співставляють в програмному забезпеченні дані КТ та дані скана гіпсової моделі в тривимірному просторі по шляпках пін (позакісткових частинах пін) з застосуванням цефалометричних віртуальних маркерів, отримують тривимірну реконструкцію кістки, рельєфу слизової, з рекомендованими осями імплантатів з прив'язкою до оклюзії, позиції майбутніх коронок зубів, рекомендовані осі співставляють з умовами кістки та визначають остаточну позицію імплантатів, після чого генерують шаблон з направляючими. 4 UA 100041 U 5 UA 100041 U 6 UA 100041 U 7 UA 100041 U Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 8
ДивитисяДодаткова інформація
Автори англійськоюPantus Andrii Volodymyrovych, Hrekuliak Vasyl Vasyliovych, Chelii Oleksandr Ivanovych, Shturmak Vasyl Mykolaiovych, Kogut Volodymyr Lyubomyrovych, Bilous Orest Teodorovych
Автори російськоюПантус Андрей Владимирович, Грекуляк Василий Васильевич, Челий Александр Иванович, Штурмак Василий Николаевич, Когут Владимир Любомирович, Билоус Орест Теодорович
МПК / Мітки
МПК: A61C 8/00, A61C 13/34, A61C 9/00, A61C 13/38
Мітки: навігації, шаблонів, пілотної, використанням, дентальних, імплантатів, постановки, спосіб
Код посилання
<a href="https://ua.patents.su/10-100041-sposib-navigaci-dlya-pilotno-postanovki-dentalnikh-implantativ-z-vikoristannyam-shabloniv.html" target="_blank" rel="follow" title="База патентів України">Спосіб навігації для пілотної постановки дентальних імплантатів з використанням шаблонів</a>
Спосіб виготовлення навігаційних шаблонів з напрямними для пілотної постановки дентальних імплантатів
Номер патенту: 90967
Опубліковано: 10.06.2014
Автори: Дудій Петро Федорович, Грекуляк Василь Васильович, Рожко Микола Михайлович, Ерстенюк Ганна Михайлівна, Штурмак Василь Миколайович, Челій Олександр Іванович, Палійчук Микола Іванович, Рижик Валер'ян Миколайович, Пантус Андрій Володимирович, Когут Володимир Любомирович, Пермінов Олександр Борисович
Мітки: навігаційних, постановки, імплантатів, напрямними, шаблонів, виготовлення, спосіб, пілотної, дентальних
Формула / Реферат:
Спосіб виготовлення навігаційних шаблонів з напрямними для постановки дентальних імплантатів, що включає попереднє сканування щелеп на конусній томографії та наступне планування постановки дентальних імплантатів в комп'ютерній програмі із зняттям відбитку та виготовленням моделі, який відрізняється тим, що виготовлену модель з маркерами попередньо сканують і співставляють її тривимірну реконструкцію в комп'ютерній програмі з...
Спосіб корекції навігаційного шаблону для пілотної постановки дентальних імплантатів
Номер патенту: 99272
Опубліковано: 25.05.2015
Автори: Челій Світлана Теодозіївна, Андрійців Степан Степанович, Орішко Анастасія Ярославівна, Рожко Микола Михайлович, Штурмак Василь Миколайович
Мітки: пілотної, навігаційного, корекції, постановки, спосіб, дентальних, імплантатів, шаблону
Формула / Реферат:
Спосіб корекції навігаційного шаблону для постановки дентальних імплантатів шляхом фіксації шаблонів з опорою на зуби і м'які тканини коміркового відростка та частини, виготовлених методом лазерної стереолітографії, який відрізняється тим, що навігаційний шаблон з опорою на зуби і комірковий відросток та частину корегують силіконовим базисним матеріалом на основі вінілполісилоксану картриджної системи замішування, при цьому попередньо...
Інструмент “торнадо-1″ для постановки нерізьбових імплантатів з контролем стабілізації

Номер патенту: 63272
Опубліковано: 10.10.2011
Автори: Борн Євген Едуардович, Бунь Юрій Миколайович
МПК: A61C 8/00
Мітки: торнадо-1, стабілізації, імплантатів, інструмент, постановки, контролем, нерізьбових
Формула / Реферат:
Інструмент для постановки нерізьбових дентальних імплантатів, що містить вібраційний механізм, який відрізняється тим, що містить корпус вібраційного механізму поступальної дії, на проксимальному кінці якого розміщений уніфікований наконечник робочої частини для прикріплення до механічного приводу стоматологічної установки, а на дистальному кінці - фіксатор нерізьбового дентального імплантату з контролем стабілізації.
Спосіб оцінки репарації після установки дентальних імплантатів
Номер патенту: 55837
Опубліковано: 27.12.2010
Автори: Непрелюк Ольга Анатоліївна, Жадько Сергій Ігорович, Ірза Оксана Леонтіївна, Колбасін Павло Миколайович
МПК: A61C 8/00
Мітки: репарації, установки, оцінки, імплантатів, дентальних, спосіб
Формула / Реферат:
Спосіб оцінки репарації після установки дентальних імплантатів, що включає цитоморфометричне дослідження відбитків ясен в периімплантатній ділянці, наступне обчислення індексу деструкції і запально-деструктивного індексу, який відрізняється тим, що додатково досліджують сукцинатдегідрогеназу (СДГ) і лактатдегідрогеназу (ЛДГ) периферичної крові пацієнта, додатково досліджують активність в дегідрогенах нейтрофілів периферичної крові пацієнта,...
Спосіб оцінки репарації після установки дентальних імплантатів у пацієнтів з нікотиновою інтоксикацією
Номер патенту: 67770
Опубліковано: 12.03.2012
Автори: Колбасін Павло Миколайович, Герасименко Пилип Іванович, Жадько Сергій Ігорович, Куліков Максим Сергійович, Куліков Олексій Сергійович
МПК: A61C 8/00
Мітки: інтоксикацією, оцінки, спосіб, дентальних, імплантатів, репарації, пацієнтів, установки, нікотиновою
Формула / Реферат:
Спосіб оцінки репарації після установки дентальних імплантатів у пацієнтів з нікотиновою інтоксикацією, що включає цитоморфометричне дослідження відбитків ясен в періімплантатній ділянці, обчислення індексу деструкції і запально-деструктивного індексу, який відрізняється тим, що додатково досліджують активність дегідрогеназ нейтрофілів периферичної крові пацієнта, обчислюють значення середнього цитохімічного показника - СЦП для ЛДГ і СДГ і...
Попередній патент: Спосіб визначення ендогенної інтоксикації у часто хворіючих дітей
Наступний патент: Спосіб отримання теплоносія
Випадковий патент: Термокаталітичний датчик горючих газів