Наземна допоміжна бойова робототехнічна машина модульного типу для супроводження бронетанкового озброєння і техніки
Номер патенту: 101993
Опубліковано: 27.05.2013
Автори: Клименко Вадим Миколайович, Коваль Андрій Андрійович, Дяченко Олександр Феодосійович, Борисюк Михайло Дем'янович, Толстой Олексій Володимирович, Беліков Віктор Тріфонович, Магерамов Лютфалій Курбан-Алієвич, Янчик Олександр Григорович, Лещенко Олег Іванович
Формула / Реферат
1. Наземна допоміжна бойова робототехнічна машина модульного типу для супроводження бронетанкового озброєння і техніки, основний виконавчий агрегат якої містить енергетичний функціональний блок-модуль у вигляді комплекту статичних джерел електричної енергії електрохімічного, конденсаторного або комбінованого типу, статичні перетворювачі електроенергії, електромеханічні колісні, гусеничні або колісно-гусеничні рушії у вигляді автономних транспортних функціональних блоків-модулів, комплекси датчиків системи тягового електроприводу, зовнішньої обстановки і діагностики, а так само комплект функціональних блоків-модулів виконавчих механізмів, зокрема маніпуляторів, систем озброєння, модульних автономних блоків-модулів спостереження і розвідки і механізмів самоліквідації, яка відрізняється тим, що її основний виконавчий агрегат обладнаний двома горизонтальними півосями, які обернені у бік бічних кришок і встановлений в підвішеному стані з можливістю вільного обертання навколо подовжньої осі у внутрішній порожнині герметичного жорсткого циліндрового металевого або композитного корпусу-контейнера у двох горизонтальних опорних вузлах з підшипниками ковзання або кочення, закріплених уздовж вказаної подовжньої осі корпусу-контейнера на суцільних плоских круглих днищах або хрестоподібних плоских основах конічних бічних кришок зовнішнього корпусу-контейнера, причому центр тяжіння основного виконавчого агрегату робототехнічної машини розташований нижче за подовжню вісь зовнішнього герметичного корпусу на відстані, рівному не менше одній третині його радіусу.
2. Наземна допоміжна бойова робототехнічна машина модульного типу для супроводження бронетанкового озброєння і техніки за п. 1, яка відрізняється тим, що підшипники ковзання виконані конічними з синтетичним, наприклад, фторопластовим покриттям.
4. Наземна допоміжна бойова робототехнічна машина модульного типу для супроводження бронетанкового озброєння і техніки за пп. 1 і 2, яка відрізняється тим, що її основний виконавчий агрегат забезпечений гвинтовим механізмом регулювання ширини бази опорних коліс автономних транспортних блоків-модулів з можливістю її граничного збільшення;
5. Наземна допоміжна бойова робототехнічна машина модульного типу для супроводження бронетанкового озброєння і техніки за п. 1, 2 і 3 яка відрізняється тим, що у вузлах кріплення конічних бічних кришок герметичного циліндрового корпусу встановлені піропатрони дистанційно керованого або автоматизованого відділення вказаних кришок від корпусу.
Текст
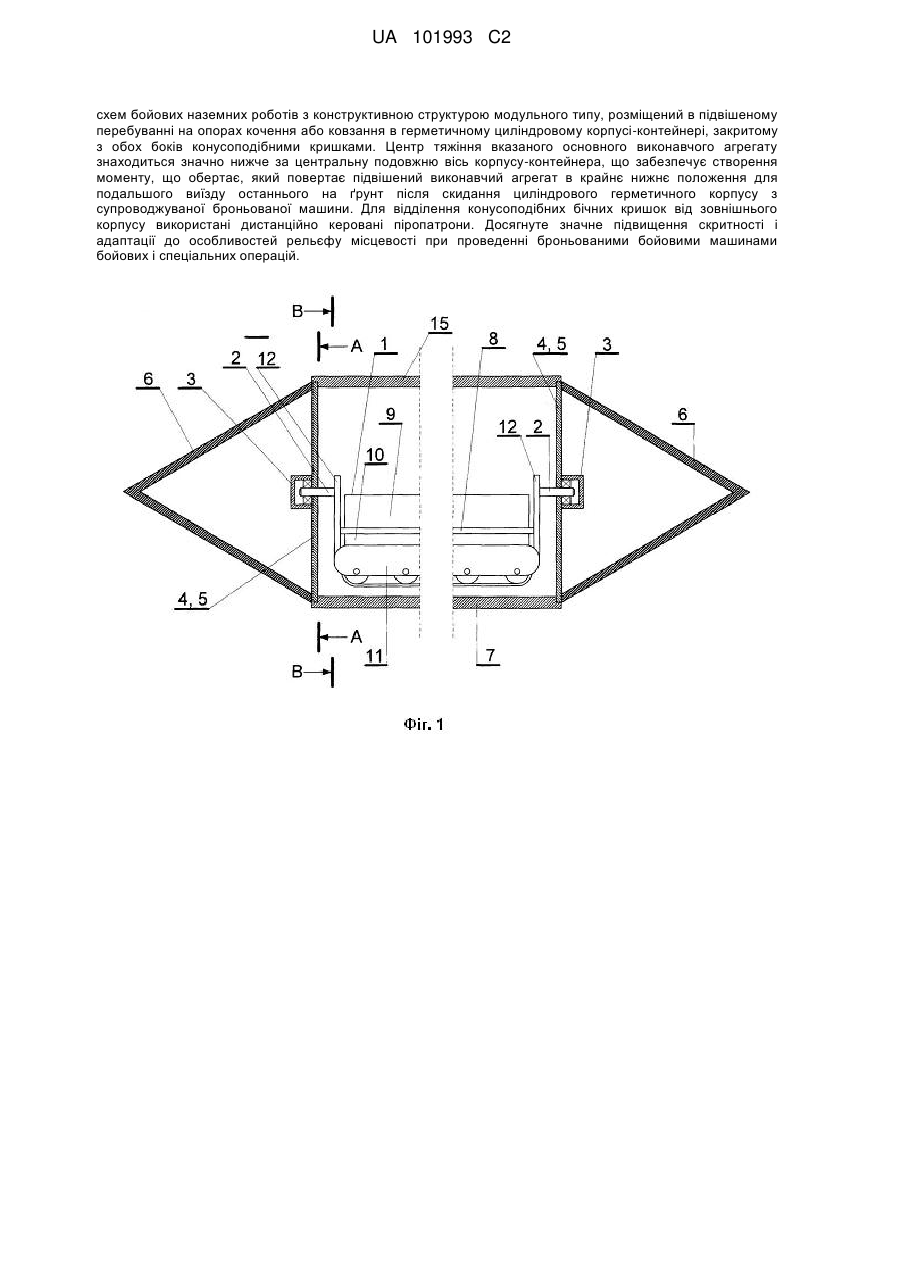
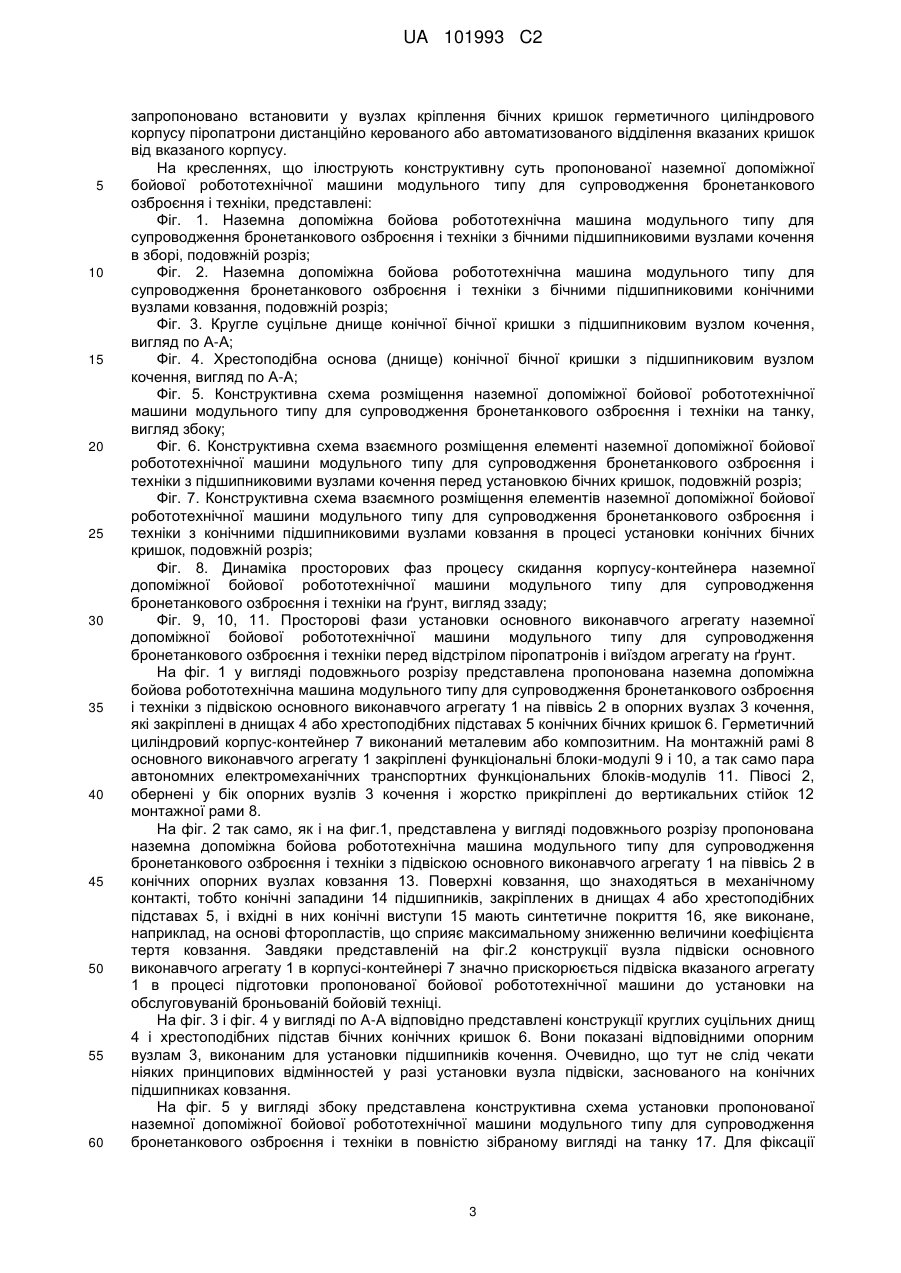
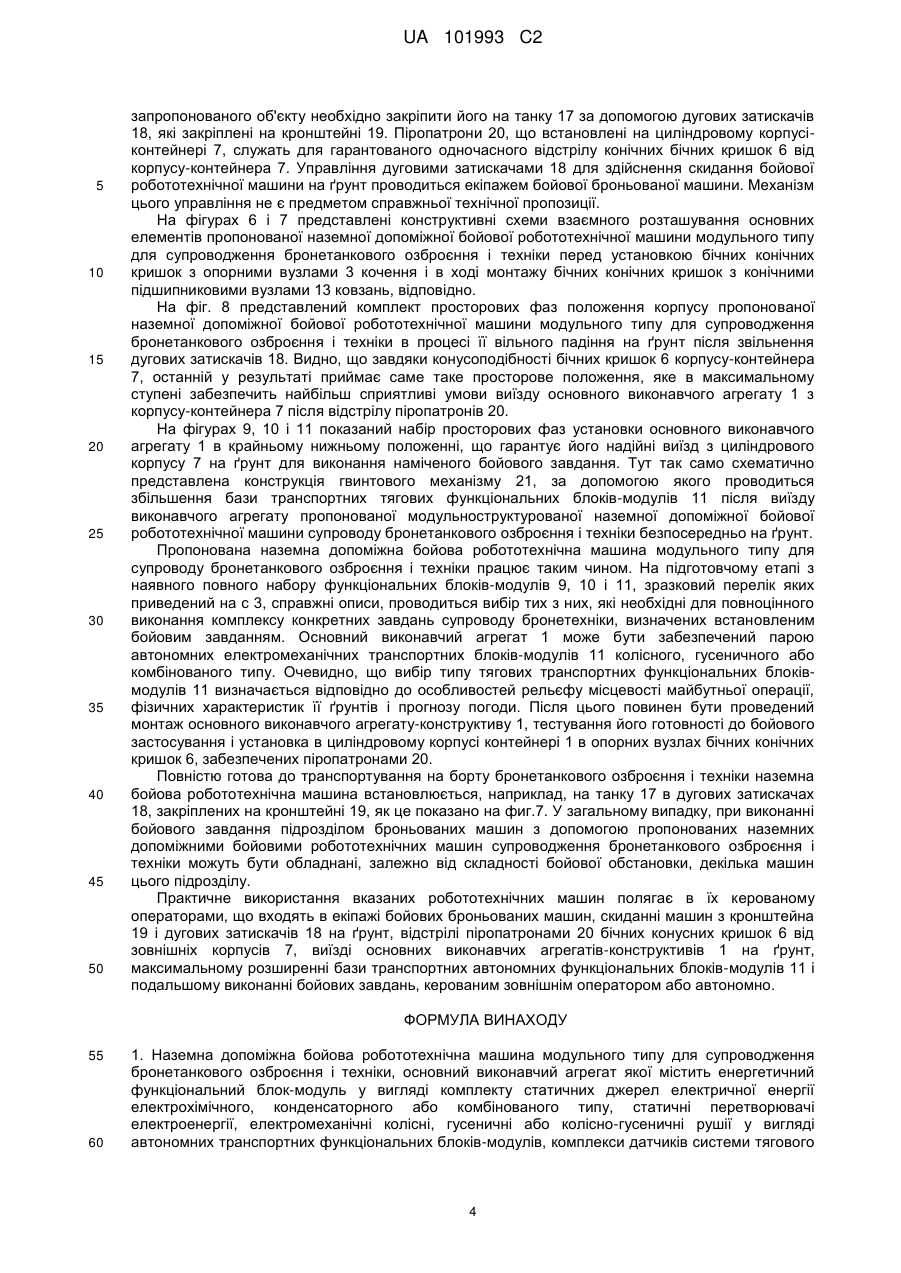
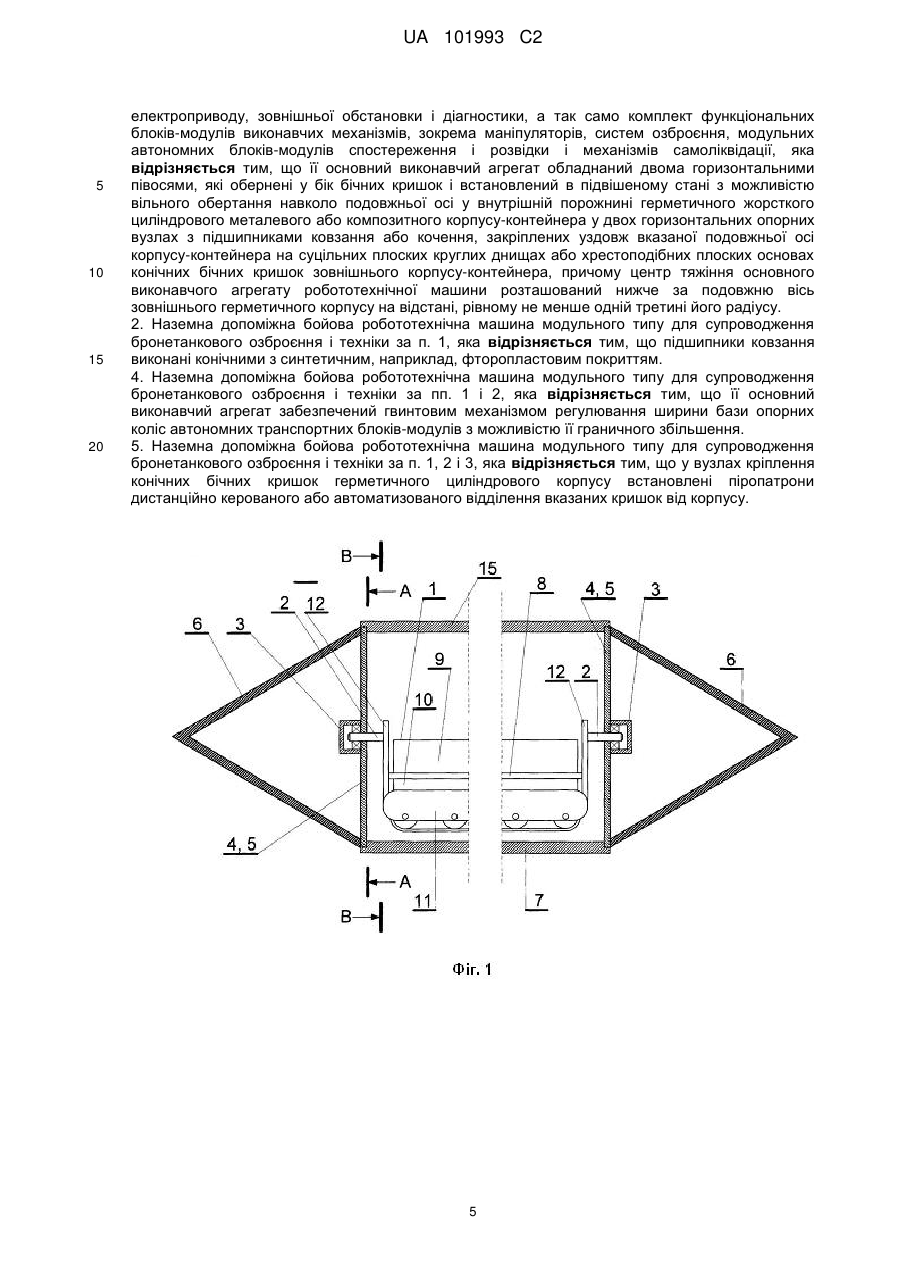
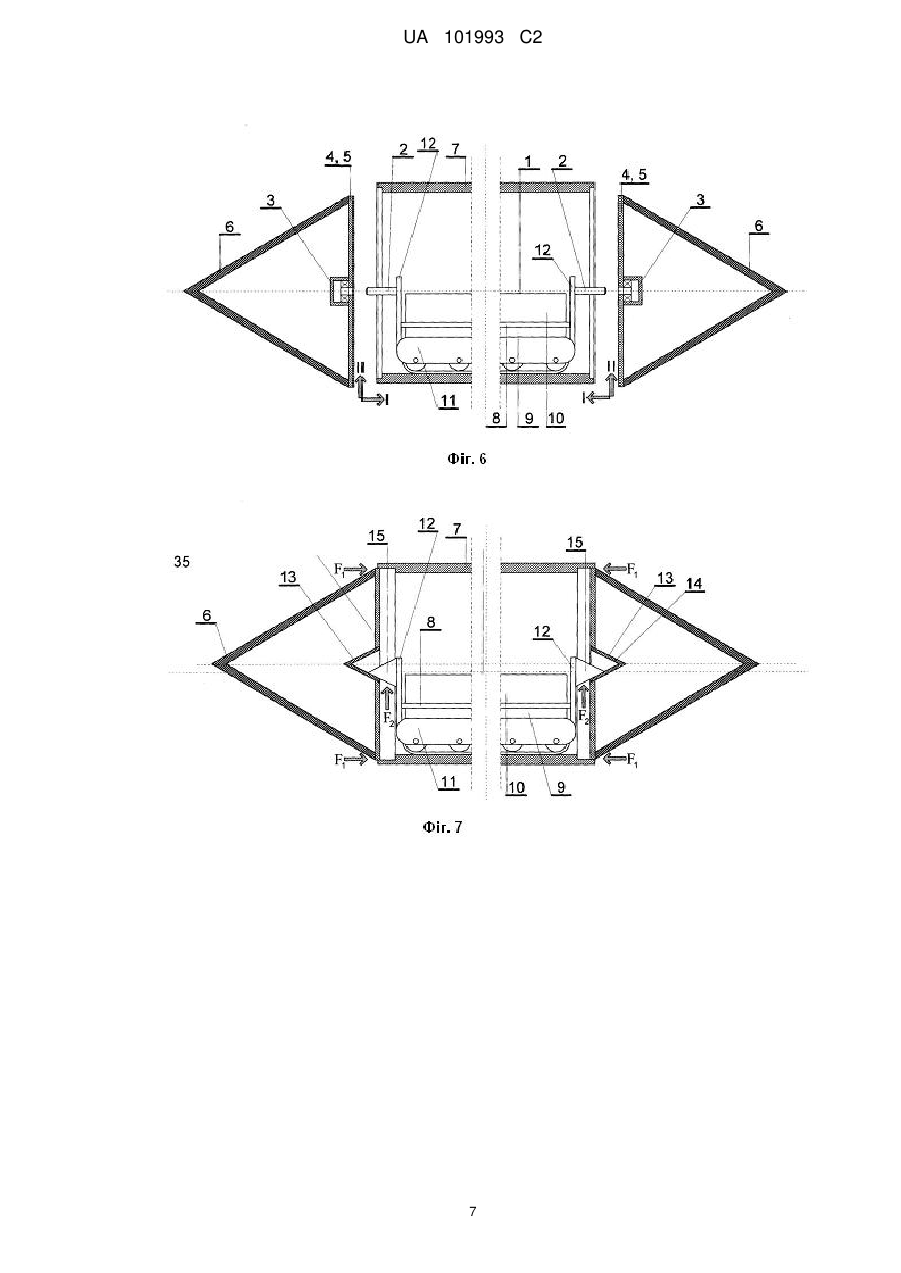
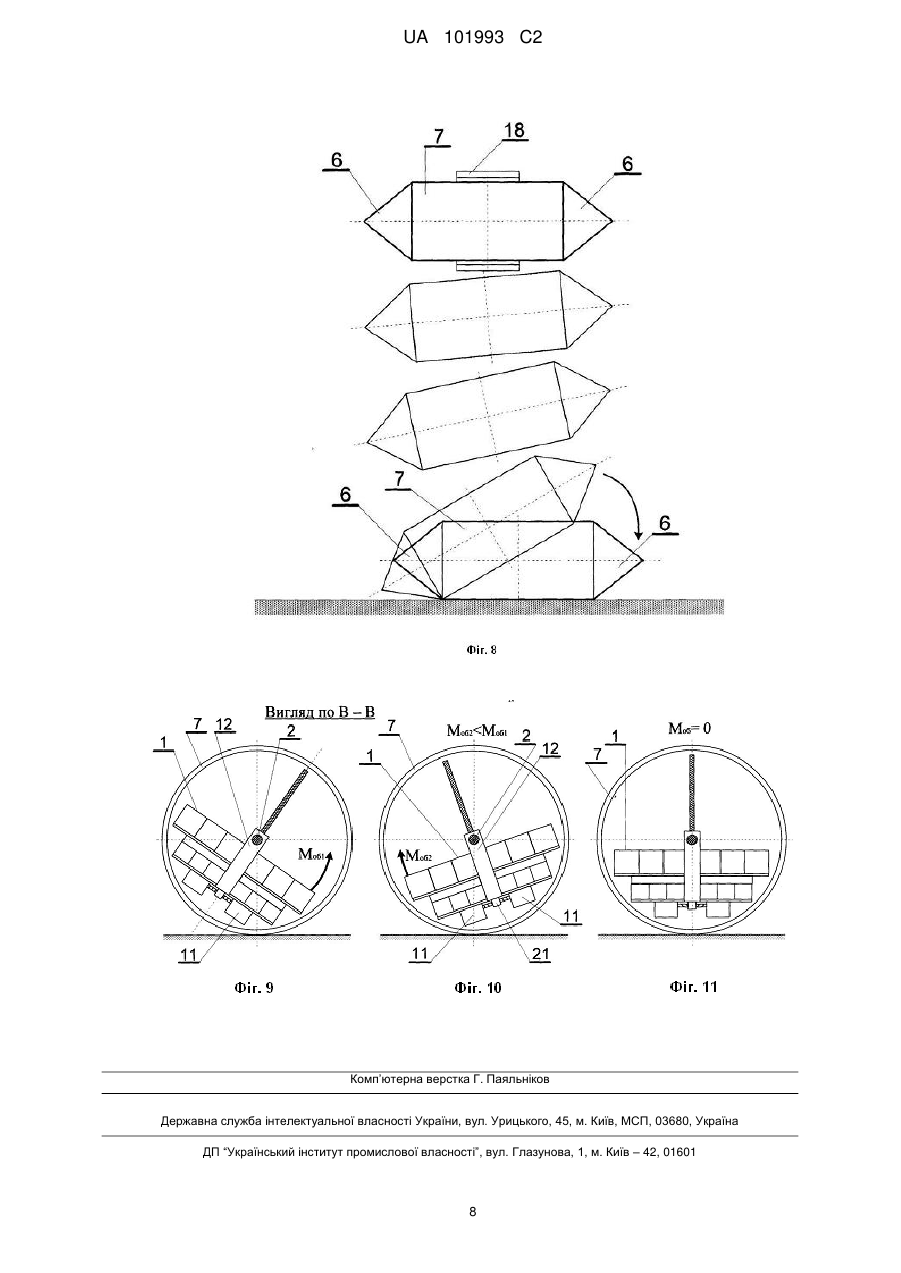
Реферат: Наземна допоміжна бойова робототехнічна машина модульного типу для супроводження бронетанкового озброєння і техніки, в якій основний виконавчий агрегат виконаний відповідно до відомих конструктивних UA 101993 C2 (12) UA 101993 C2 схем бойових наземних роботів з конструктивною структурою модульного типу, розміщений в підвішеному перебуванні на опорах кочення або ковзання в герметичному циліндровому корпусі-контейнері, закритому з обох боків конусоподібними кришками. Центр тяжіння вказаного основного виконавчого агрегату знаходиться значно нижче за центральну подовжню вісь корпусу-контейнера, що забезпечує створення моменту, що обертає, який повертає підвішений виконавчий агрегат в крайнє нижнє положення для подальшого виїзду останнього на ґрунт після скидання циліндрового герметичного корпусу з супроводжуваної броньованої машини. Для відділення конусоподібних бічних кришок від зовнішнього корпусу використані дистанційно керовані піропатрони. Досягнуте значне підвищення скритності і адаптації до особливостей рельєфу місцевості при проведенні броньованими бойовими машинами бойових і спеціальних операцій. UA 101993 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до області військової техніки, а саме до спеціалізованих бойових робототехнічних наземних установок супроводу широкої номенклатури бронетанкового озброєння і техніки, і може бути використаний для забезпечення виконання вказаним видом озброєння сухопутних військ бойових і спеціальних завдань, поставлених як перед одиночними броньованими бойовими машинами, так і бронетанковим озброєнням і технікою, що діють у складі підрозділів. До таких завдань, зокрема, можуть бути віднесені: визначення параметрів водних перешкод, зокрема їх глибин, рельєфу дна, швидкостей течії і інших їх особливостей; виявлення, знешкодження і ліквідація протитанкових мін, пророблення проходів в мінних полях; розвідка бойових порядків вогняних і протитанкових засобів супротивника; забезпечення евакуації бойової броньованої машини при застряванні; евакуація поранених з бойових броньованих машин. Обставиною принципового значення тут є те, що унаслідок постійного зростання у всьому світі останніми роками числа локальних військових конфліктів, терористичних інцидентів і піратських актів, в які тим або іншим чином виявляються залученими найбільш розвинені в науково-технічному відношенні країни, практичне використання наземних військових робототехнічних пристроїв різко зросло, у зв'язку з тим, що їх застосування сприяє максимальному зниженню рівня людських втрат. Завдяки цьому до теперішнього часу вже накопичений великий об'єм теоретичних і експериментальних даних, що відносяться до аналізу безпосереднього застосування військових наземних роботів в реальних бойових і спеціальних операціях. Так, наприклад, відомі військові роботи, описані, в опублікованих в Інтернеті російським інформаційним виданням CitCity 06-07.11.2007 року матеріалах "Бойові сухопутні роботи" (см. http://www citcity.ru), які достатньо широко застосовуються розвиненими в технічному відношенні країнами для виконання практично всіх функцій, описаних вище. У цих матеріалах виділяються американські військові роботи сімейства РАСВОТ, що застосовуються для розмінування, а так само роботи TAGS і REDOWL. У Ізраїлі, Великобританії і Германії розроблені і знайшли військове застосування рухомі гусеничні роботи для розвідки, розмінування і знищення вибухових пристроїв різного типу. Армія США під час бойових дій і поліцейських операцій в Іраку з успіхом використовувала озброєні вогнепальною зброєю малогабаритні гусеничні роботи в наступальних і розвідувальних операціях. Загальна кількість військових роботів, використаних армією США в Іраку до кінця 2008 року, досягала чотирьох тисяч одиниць. На державному рівні розробкою і практичним використанням військових роботів займаються в Росії, Франції, Великобританії і Японії. Відомі перспективні системи наземних бойових робототехнічних машин, які, починаючи з 2008 року, були розроблені в Україні співробітниками Наукового центру бойового застосування Сухопутних військ Військового інституту Одеського національного політехнічного університету. До теперішнього часу вони захищені п'ятьма патентами України на винаходи. До них належать, наприклад, патенти України №№ 87777 від 10.08.2009 p., 888333 від 25.11.2009 p., 88585 від 26.10.2009 р. і 90979 від 10.06.2010 р. На жаль, відомі до теперішнього часу системи сучасних бойових наземних роботів не можуть бути безпосередньо використані для вирішення бойових завдань, які визначені вище для робототехнічних механізмів супроводу бронетанкової техніки, по міркуваннях, які приведені далі. Як прототип пропонованої наземної допоміжної бойової робототехнічної машини модульного типу для супроводження бронетанкового озброєння і техніки прийнятий "Модульний структурований військовий наземний робот з вертикальним гвинтовим підіймачем" згідно патенту України № 90969 від 10.06.2010 p., клас МПК (2009) F41H 7/00, автори Поповіченко О.В., Толстой О.В., Беліков В.Т., Васильєв В.В., Грачов М.М. Аналіз конструктивних особливостей, як прототипу, так і реалізованих до теперішнього часу і описаних в спеціальній літературі і Інтернеті наземних військових роботів бойового і спеціального застосування, дозволяє зробити висновок про неможливість безпосереднього, прямого застосування подібних наземних роботів-прототипів як робототехнічні машини супроводження бронетанкового озброєння і техніки. Це обумовлено принциповим в цьому плані недоліком робототехнічної машини-прототипу, який полягає в тому, що вона практично не пристосована для транспортування до місця її бойового функціонування, яка, як представляється очевидним, повинна бути проведена безпосередньо на борту супроводжуваної бойової броньованої гусеничної або колісної машини. Ця обставина пов'язана 1 UA 101993 C2 5 10 15 20 25 30 35 40 45 50 55 60 з тим, що робототехнічна машина-прототип, так само як і інші модифікації цих бойових наземних роботів, практично не може бути безпосередньо скинута з корпусу броньованої бойової машини на ґрунт. При такому скиданні робототехнічної машини-прототипу з борту, наприклад, танка безпосередньо на ґрунт абсолютно неминуча поява істотних пошкоджень механізмів не тільки ходової частини або аналогічних пошкоджень електричних ланцюгів, але і тих виконавчих механізмів, які служать для реалізації основних функцій робототехнічної машини супроводу бронетанкового озброєння і техніки. Крім того, очевидно, що в цьому випадку вельми мала вірогідність надійного попадання опорних коліс шасі робототехнічної машини супроводу на ґрунт, що гарантує її повноцінне функціонування після відділення від супроводжуваної броньованої машини і приземлення. З метою усунення вказаних недоліків прототипу запропонована конструкція наземної допоміжної бойової робототехнічної машини модульного типу для супроводження бронетанкового озброєння і техніки, основний виконавчий агрегат якої містить енергетичний функціональний блок-модуль у вигляді комплекту статичних джерел електричної енергії електрохімічного, конденсаторного або комбінованого типів, статичні перетворювачі електроенергії, електромеханічні колісні, гусеничні або колісно-гусеничні рушії у вигляді автономних транспортних функціональних блоків-модулів, комплекси датчиків системи тягового електроприводу, зовнішньої обстановки і діагностики, а так само комплект функціональних блоків-модулів виконавчих механізмів, зокрема маніпуляторів, систем озброєння, модульних автономних блоків-модулів спостереження і розвідки і механізмів самоліквідації, і встановлений в підвішеному стані з можливістю вільного обертання навколо подовжньої осі у внутрішній порожнині герметичного жорсткого циліндрового металевого або композитного корпусуконтейнера в двох горизонтальних опорних вузлах з підшипниками ковзання або кочення, закріплених уздовж вказаної подовжньої осі корпусу-контейнера на плоских круглих суцільних днищах або хрестоподібних підставах конічних бічних кришок зовнішнього корпусу-контейнера, причому центр тяжіння основного виконавчого агрегату робототехнічної машини повинен бути розташований нижче за подовжню вісь зовнішнього герметичного корпусу на відстані, рівному не менше одній третині його радіусу. Обидві бічні кришки зовнішнього циліндрового корпусу запропоновано, виконати, як було вже вказано вище, конусоподібними. Завдяки цованої наземної допоміжної бойової робототехнічної машини модульного типу для супроводу бронетанкової техніки на ґрунті в горизонтальному положенні. Це, у свою чергу, гарантує безперешкодне, надійне покидання цим агрегатом корпусу-контейнера і його подальше функціонування в зовнішньому просторі. У спрощеному варіанті конструкції опорних вузлів, що полегшує монтажні роботи, запропоновано виконати опорні підшипникові вузли у вигляді конічних підшипників ковзання, у яких величина коефіцієнта тертя ковзання максимально понижена завдяки застосуванню фторопластового (тефлонового) покриття всіх поверхонь підшипників, що труться. Конічна конфігурація взаємно контактуючих поверхонь вказаних підшипників забезпечує надійну центрівку основного виконавчого агрегату пропонованої робототехнічної машини супроводу бронетанкового озброєння і техніки в процесі його установки в корпус-контейнер. З метою реалізації цього конструктивного удосконалення по обидві сторони основного виконавчого агрегату наземної допоміжної бойової робототехнічної машини модульного типу для супроводження бронетанкового озброєння і техніки уздовж подовжньої осі циліндрового корпусу-контейнера жорстко закріплено дві горизонтальні півосі, які під час збірки вказаної бойової робототехнічної машини встановлюються в опорних вузлах обох днищ бічних конічних кришок. Очевидно, що необхідність вписання контуру поперечного перетину основного виконавчого агрегату наземної допоміжної бойової робототехнічної машини модульного типу для супроводу бронетанкового озброєння і техніки в круг циліндрового корпусу-контейнера приводить до конструктивної необхідності максимального зближення один з одним по ширині автономних транспортних функціональних блоків-модулів. Це, у свою чергу, істотно зменшує ширину бази опорних коліс, і, відповідно, знижує стійкість вказаного агрегату на ґрунті. Для збереження високої стійкості виконавчого агрегату при його русі на ґрунті запропоновано встановити на вказаному агрегаті спеціальний гвинтовий механізм регулювання ширини бази опорних коліс, здатний забезпечити її максимальне збільшення після виїзду основного виконавчого агрегату з циліндрового контейнера пропонованої робототехнічної машини. Для того, щоб здійснити надійне, кероване членами екіпажа броньованої гусеничної або колісної машини, відділення бічних кришок, які закривають зовнішній герметичний циліндровий корпус, що забезпечує гарантований виїзд основного виконавчого агрегату пропонованої робототехнічної машини супроводу із зовнішнього циліндрового корпусу на ґрунт, 2 UA 101993 C2 5 10 15 20 25 30 35 40 45 50 55 60 запропоновано встановити у вузлах кріплення бічних кришок герметичного циліндрового корпусу піропатрони дистанційно керованого або автоматизованого відділення вказаних кришок від вказаного корпусу. На кресленнях, що ілюструють конструктивну суть пропонованої наземної допоміжної бойової робототехнічної машини модульного типу для супроводження бронетанкового озброєння і техніки, представлені: Фіг. 1. Наземна допоміжна бойова робототехнічна машина модульного типу для супроводження бронетанкового озброєння і техніки з бічними підшипниковими вузлами кочення в зборі, подовжній розріз; Фіг. 2. Наземна допоміжна бойова робототехнічна машина модульного типу для супроводження бронетанкового озброєння і техніки з бічними підшипниковими конічними вузлами ковзання, подовжній розріз; Фіг. 3. Кругле суцільне днище конічної бічної кришки з підшипниковим вузлом кочення, вигляд по А-А; Фіг. 4. Хрестоподібна основа (днище) конічної бічної кришки з підшипниковим вузлом кочення, вигляд по А-А; Фіг. 5. Конструктивна схема розміщення наземної допоміжної бойової робототехнічної машини модульного типу для супроводження бронетанкового озброєння і техніки на танку, вигляд збоку; Фіг. 6. Конструктивна схема взаємного розміщення елементі наземної допоміжної бойової робототехнічної машини модульного типу для супроводження бронетанкового озброєння і техніки з підшипниковими вузлами кочення перед установкою бічних кришок, подовжній розріз; Фіг. 7. Конструктивна схема взаємного розміщення елементів наземної допоміжної бойової робототехнічної машини модульного типу для супроводження бронетанкового озброєння і техніки з конічними підшипниковими вузлами ковзання в процесі установки конічних бічних кришок, подовжній розріз; Фіг. 8. Динаміка просторових фаз процесу скидання корпусу-контейнера наземної допоміжної бойової робототехнічної машини модульного типу для супроводження бронетанкового озброєння і техніки на ґрунт, вигляд ззаду; Фіг. 9, 10, 11. Просторові фази установки основного виконавчого агрегату наземної допоміжної бойової робототехнічної машини модульного типу для супроводження бронетанкового озброєння і техніки перед відстрілом піропатронів і виїздом агрегату на ґрунт. На фіг. 1 у вигляді подовжнього розрізу представлена пропонована наземна допоміжна бойова робототехнічна машина модульного типу для супроводження бронетанкового озброєння і техніки з підвіскою основного виконавчого агрегату 1 на піввісь 2 в опорних вузлах 3 кочення, які закріплені в днищах 4 або хрестоподібних підставах 5 конічних бічних кришок 6. Герметичний циліндровий корпус-контейнер 7 виконаний металевим або композитним. На монтажній рамі 8 основного виконавчого агрегату 1 закріплені функціональні блоки-модулі 9 і 10, а так само пара автономних електромеханічних транспортних функціональних блоків-модулів 11. Півосі 2, обернені у бік опорних вузлів 3 кочення і жорстко прикріплені до вертикальних стійок 12 монтажної рами 8. На фіг. 2 так само, як і на фиг.1, представлена у вигляді подовжнього розрізу пропонована наземна допоміжна бойова робототехнічна машина модульного типу для супроводження бронетанкового озброєння і техніки з підвіскою основного виконавчого агрегату 1 на піввісь 2 в конічних опорних вузлах ковзання 13. Поверхні ковзання, що знаходяться в механічному контакті, тобто конічні западини 14 підшипників, закріплених в днищах 4 або хрестоподібних підставах 5, і вхідні в них конічні виступи 15 мають синтетичне покриття 16, яке виконане, наприклад, на основі фторопластів, що сприяє максимальному зниженню величини коефіцієнта тертя ковзання. Завдяки представленій на фіг.2 конструкції вузла підвіски основного виконавчого агрегату 1 в корпусі-контейнері 7 значно прискорюється підвіска вказаного агрегату 1 в процесі підготовки пропонованої бойової робототехнічної машини до установки на обслуговуваній броньованій бойовій техніці. На фіг. 3 і фіг. 4 у вигляді по А-А відповідно представлені конструкції круглих суцільних днищ 4 і хрестоподібних підстав бічних конічних кришок 6. Вони показані відповідними опорним вузлам 3, виконаним для установки підшипників кочення. Очевидно, що тут не слід чекати ніяких принципових відмінностей у разі установки вузла підвіски, заснованого на конічних підшипниках ковзання. На фіг. 5 у вигляді збоку представлена конструктивна схема установки пропонованої наземної допоміжної бойової робототехнічної машини модульного типу для супроводження бронетанкового озброєння і техніки в повністю зібраному вигляді на танку 17. Для фіксації 3 UA 101993 C2 5 10 15 20 25 30 35 40 45 50 запропонованого об'єкту необхідно закріпити його на танку 17 за допомогою дугових затискачів 18, які закріплені на кронштейні 19. Піропатрони 20, що встановлені на циліндровому корпусіконтейнері 7, служать для гарантованого одночасного відстрілу конічних бічних кришок 6 від корпусу-контейнера 7. Управління дуговими затискачами 18 для здійснення скидання бойової робототехнічної машини на ґрунт проводиться екіпажем бойової броньованої машини. Механізм цього управління не є предметом справжньої технічної пропозиції. На фігурах 6 і 7 представлені конструктивні схеми взаємного розташування основних елементів пропонованої наземної допоміжної бойової робототехнічної машини модульного типу для супроводження бронетанкового озброєння і техніки перед установкою бічних конічних кришок з опорними вузлами 3 кочення і в ході монтажу бічних конічних кришок з конічними підшипниковими вузлами 13 ковзань, відповідно. На фіг. 8 представлений комплект просторових фаз положення корпусу пропонованої наземної допоміжної бойової робототехнічної машини модульного типу для супроводження бронетанкового озброєння і техніки в процесі її вільного падіння на ґрунт після звільнення дугових затискачів 18. Видно, що завдяки конусоподібності бічних кришок 6 корпусу-контейнера 7, останній у результаті приймає саме таке просторове положення, яке в максимальному ступені забезпечить найбільш сприятливі умови виїзду основного виконавчого агрегату 1 з корпусу-контейнера 7 після відстрілу піропатронів 20. На фігурах 9, 10 і 11 показаний набір просторових фаз установки основного виконавчого агрегату 1 в крайньому нижньому положенні, що гарантує його надійні виїзд з циліндрового корпусу 7 на ґрунт для виконання наміченого бойового завдання. Тут так само схематично представлена конструкція гвинтового механізму 21, за допомогою якого проводиться збільшення бази транспортних тягових функціональних блоків-модулів 11 після виїзду виконавчого агрегату пропонованої модульноструктурованої наземної допоміжної бойової робототехнічної машини супроводу бронетанкового озброєння і техніки безпосередньо на ґрунт. Пропонована наземна допоміжна бойова робототехнічна машина модульного типу для супроводу бронетанкового озброєння і техніки працює таким чином. На підготовчому етапі з наявного повного набору функціональних блоків-модулів 9, 10 і 11, зразковий перелік яких приведений на с 3, справжні описи, проводиться вибір тих з них, які необхідні для повноцінного виконання комплексу конкретних завдань супроводу бронетехніки, визначених встановленим бойовим завданням. Основний виконавчий агрегат 1 може бути забезпечений парою автономних електромеханічних транспортних блоків-модулів 11 колісного, гусеничного або комбінованого типу. Очевидно, що вибір типу тягових транспортних функціональних блоківмодулів 11 визначається відповідно до особливостей рельєфу місцевості майбутньої операції, фізичних характеристик її ґрунтів і прогнозу погоди. Після цього повинен бути проведений монтаж основного виконавчого агрегату-конструктиву 1, тестування його готовності до бойового застосування і установка в циліндровому корпусі контейнері 1 в опорних вузлах бічних конічних кришок 6, забезпечених піропатронами 20. Повністю готова до транспортування на борту бронетанкового озброєння і техніки наземна бойова робототехнічна машина встановлюється, наприклад, на танку 17 в дугових затискачах 18, закріплених на кронштейні 19, як це показано на фиг.7. У загальному випадку, при виконанні бойового завдання підрозділом броньованих машин з допомогою пропонованих наземних допоміжними бойовими робототехнічних машин супроводження бронетанкового озброєння і техніки можуть бути обладнані, залежно від складності бойової обстановки, декілька машин цього підрозділу. Практичне використання вказаних робототехнічних машин полягає в їх керованому операторами, що входять в екіпажі бойових броньованих машин, скиданні машин з кронштейна 19 і дугових затискачів 18 на ґрунт, відстрілі піропатронами 20 бічних конусних кришок 6 від зовнішніх корпусів 7, виїзді основних виконавчих агрегатів-конструктивів 1 на ґрунт, максимальному розширенні бази транспортних автономних функціональних блоків-модулів 11 і подальшому виконанні бойових завдань, керованим зовнішнім оператором або автономно. ФОРМУЛА ВИНАХОДУ 55 60 1. Наземна допоміжна бойова робототехнічна машина модульного типу для супроводження бронетанкового озброєння і техніки, основний виконавчий агрегат якої містить енергетичний функціональний блок-модуль у вигляді комплекту статичних джерел електричної енергії електрохімічного, конденсаторного або комбінованого типу, статичні перетворювачі електроенергії, електромеханічні колісні, гусеничні або колісно-гусеничні рушії у вигляді автономних транспортних функціональних блоків-модулів, комплекси датчиків системи тягового 4 UA 101993 C2 5 10 15 20 електроприводу, зовнішньої обстановки і діагностики, а так само комплект функціональних блоків-модулів виконавчих механізмів, зокрема маніпуляторів, систем озброєння, модульних автономних блоків-модулів спостереження і розвідки і механізмів самоліквідації, яка відрізняється тим, що її основний виконавчий агрегат обладнаний двома горизонтальними півосями, які обернені у бік бічних кришок і встановлений в підвішеному стані з можливістю вільного обертання навколо подовжньої осі у внутрішній порожнині герметичного жорсткого циліндрового металевого або композитного корпусу-контейнера у двох горизонтальних опорних вузлах з підшипниками ковзання або кочення, закріплених уздовж вказаної подовжньої осі корпусу-контейнера на суцільних плоских круглих днищах або хрестоподібних плоских основах конічних бічних кришок зовнішнього корпусу-контейнера, причому центр тяжіння основного виконавчого агрегату робототехнічної машини розташований нижче за подовжню вісь зовнішнього герметичного корпусу на відстані, рівному не менше одній третині його радіусу. 2. Наземна допоміжна бойова робототехнічна машина модульного типу для супроводження бронетанкового озброєння і техніки за п. 1, яка відрізняється тим, що підшипники ковзання виконані конічними з синтетичним, наприклад, фторопластовим покриттям. 4. Наземна допоміжна бойова робототехнічна машина модульного типу для супроводження бронетанкового озброєння і техніки за пп. 1 і 2, яка відрізняється тим, що її основний виконавчий агрегат забезпечений гвинтовим механізмом регулювання ширини бази опорних коліс автономних транспортних блоків-модулів з можливістю її граничного збільшення. 5. Наземна допоміжна бойова робототехнічна машина модульного типу для супроводження бронетанкового озброєння і техніки за п. 1, 2 і 3, яка відрізняється тим, що у вузлах кріплення конічних бічних кришок герметичного циліндрового корпусу встановлені піропатрони дистанційно керованого або автоматизованоговідділення вказаних кришок від корпусу. 5 UA 101993 C2 6 UA 101993 C2 7 UA 101993 C2 Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 8
ДивитисяДодаткова інформація
Назва патенту англійськоюGround supplementary combat robotic vehicle of modular type for convoy of armored ammunition and equipment
Автори англійськоюBelikov Viktor Tryfonovych, Borysiuk Mykhailo Demianovych, Diachenko Oleksandr Feodosiovych, Klymenko Vadym Mykolaiovych, Koval Andrii Andriiovych, Leschenko Oleh Ivanovych, Maheramov Liutfalii Kurban-Aliievych, Tolstoi Oleksii Volodymyrovych, Yanchyk Oleksandr Hryhorovych
Назва патенту російськоюНаземная вспомогательная боевая робототехническая машина модульного типа для сопровождения бронетанкового вооружения и техники
Автори російськоюБеликов Виктор Трифонович, Борисюк Михаил Демьянович, Дьяченко Александр Феодосиевич, Клименко Вадим Николаевич, Коваль Андрей Андреевич, Лещенко Олег Иванович, Магерамов Лютфалий Курбан-Алиевич, Толстой Алексей Владимирович, Янчик Александр Григорьевич
МПК / Мітки
МПК: F41H 7/00
Мітки: техніки, модульного, бронетанкового, машина, допоміжна, бойова, типу, наземна, озброєння, робототехнічна, супроводження
Код посилання
<a href="https://ua.patents.su/10-101993-nazemna-dopomizhna-bojjova-robototekhnichna-mashina-modulnogo-tipu-dlya-suprovodzhennya-bronetankovogo-ozbroehnnya-i-tekhniki.html" target="_blank" rel="follow" title="База патентів України">Наземна допоміжна бойова робототехнічна машина модульного типу для супроводження бронетанкового озброєння і техніки</a>
Модульно структурована допоміжна наземна бойова робототехнічна машина супроводження бронетанкового озброєння і техніки
Номер патенту: 99033
Опубліковано: 10.07.2012
Автори: Магерамов Лютфалій Курбан-Алієвич, Клименко Вадим Миколайович, Толстой Олексій Володимирович, Янчик Олександр Григорович, Борисюк Михайло Дем'янович, Беліков Віктор Тріфонович, Дяченко Олександр Феодосійович, Лещенко Олег Іванович
МПК: B65D 85/68, F41H 7/02
Мітки: техніки, структурована, бронетанкового, бойова, допоміжна, модульної, машина, озброєння, наземна, супроводження, робототехнічна
Формула / Реферат:
1. Модульно структурована наземна допоміжна бойова робототехнічна машина супроводження бронетанкового озброєння і техніки, основний виконавчий агрегат якої складається з енергетичного блока-модуля у вигляді комплекту статичних джерел електричної енергії електрохімічного, конденсаторного або комбінованого типу, статичних перетворювачів електроенергії, електромеханічних колісних, гусеничних або колісно-гусеничних рушіїв у вигляді автономних...
Модульно-структурована допоміжна наземна бойова робототехнічна машина прихованого супроводження розвідників
Номер патенту: 95730
Опубліковано: 25.08.2011
Автори: Васильєв Валерій Валентинович, Клименко Вадим Миколайович, Поповіченко Олександр Вікторович, Толстой Олексій Володимирович, Беліков Віктор Тріфонович
МПК: F41H 7/00
Мітки: розвідників, бойова, супроводження, допоміжна, машина, наземна, прихованого, модульно-структурована, робототехнічна
Формула / Реферат:
1. Модульно-структурована допоміжна наземна бойова робототехнічна машина скритного супроводження розвідників, що складається з одного або двох силових блоків-модулів, забезпечених електрохімічними, конденсаторними або комбінованими джерелами електричної енергії, її перетворювачами для живлення тягових електричних двигунів гусеничного рушія і решти споживачів електричної енергії, комплексом датчиків системи тягового електроприводу, зовнішньої...
Допоміжна наземна бойова робототехнічна машина прихованого супроводу розвідників з повністю автономними транспортними блоками-модулями

Номер патенту: 96693
Опубліковано: 25.11.2011
Автори: Толстой Олексій Володимирович, Беліков Віктор Тріфонович, Поповіченко Олександр Вікторович, Васильєв Валерій Валентинович, Клименко Вадим Миколайович
МПК: F41H 7/00
Мітки: бойова, автономними, допоміжна, розвідників, транспортними, наземна, прихованого, машина, блоками-модулями, робототехнічна, повністю, супроводу
Формула / Реферат:
1. Наземна допоміжна бойова робототехнічна машина прихованого супроводу розвідників з повністю автономними транспортними блоками-модулями, що складається з набору шарнірно об'єднаних транспортних візків-траків у вигляді плоских платформ з кронштейнами, що несуть опорні колеса візків-траків, сполучених шарнірами, елементів електроживлення електрохімічного або накопичувального типу у вигляді суперконденсаторів, перетворювачів електроенергії,...
Бойова модульна наземна робототехнічна машина постійного мониторингу і охорони (захисту) стратегічних об`єктів та кордонів держави
Номер патенту: 99214
Опубліковано: 25.07.2012
Автори: Толстой Олексій Володимирович, Клименко Вадим Миколайович, Грачьов Микола Миколайович, Васильєв Валерій Валентинович, Беліков Віктор Тріфонович, Коваль Андрій Андрійович
МПК: F41H 7/00
Мітки: стратегічних, наземна, охорони, захисту, машина, робототехнічна, модульна, моніторингу, кордонів, бойова, держави, постійного, об'єктів
Формула / Реферат:
1. Бойова модульна наземна робототехнічна машина постійного моніторингу і охорони (захисту) стратегічних об'єктів та кордонів держави, що складається з набору функціональних блоків-модулів у вигляді комплекту елементів електроживлення електрохімічного або накопичувального типу, перетворювачів електроенергії, датчиків навколишнього оточення, маніпуляторів, озброєння і боєзапасу, закріплених на одному або декількох транспортних блоках-модулях,...
Бойова машина

Номер патенту: 7669
Опубліковано: 15.07.2005
Автор: Писаренко Анатолій Євменович
Формула / Реферат:
Бойова машина, що містить корпус, який зварений із броньованих листів і має прорізи люків, з виконаними по периметру окантовками та захисними екранами, що закриваються кришками з розмірами, відповідними розмірам прорізів, яка відрізняється тим, що захисні екрани виконано спільно з листами корпусу у вигляді вертикальних ребер, під якими розташовані краї Г-подібного профілю окантовок.
Попередній патент: Пропорціонально-інтегрально-диференціальний регулятор з додатковою керуючою дією
Наступний патент: Спосіб транспортування і очищення коренебульбоплодів та пристрій для його здійснення
Випадковий патент: Пристрій для точкового встановлення фасадних вікон