Бойова модульна наземна робототехнічна машина постійного мониторингу і охорони (захисту) стратегічних об`єктів та кордонів держави
Номер патенту: 99214
Опубліковано: 25.07.2012
Автори: Беліков Віктор Тріфонович, Грачьов Микола Миколайович, Толстой Олексій Володимирович, Васильєв Валерій Валентинович, Коваль Андрій Андрійович, Клименко Вадим Миколайович
Формула / Реферат
1. Бойова модульна наземна робототехнічна машина постійного моніторингу і охорони (захисту) стратегічних об'єктів та кордонів держави, що складається з набору функціональних блоків-модулів у вигляді комплекту елементів електроживлення електрохімічного або накопичувального типу, перетворювачів електроенергії, датчиків навколишнього оточення, маніпуляторів, озброєння і боєзапасу, закріплених на одному або декількох транспортних блоках-модулях, шарнірно зв'язаних один з одним, кожен з яких забезпечений комплектом автономних тягових функціональних блоків-модулів з безпосереднім, безпередаточним електричним приводом, що включає систему управління тяговими електродвигунами, яка відрізняється тим, що на кожному функціональному транспортному блоці-модулі закріплено щонайменше дві пари підпружинених горизонтальних опор кочення, опорні колеса яких знаходяться в механічному контакті з вертикальними площинами опорних елементів збірної модульної шляхової структури.
2. Бойова модульна наземна робототехнічна машина постійного моніторингу і охорони (захисту) стратегічних об'єктів та кордонів держави по п. 1, яка відрізняється тим, що всі повністю ідентичні елементи шляхової структури, розміщеної безпосередньо на ґрунті, мають U-подібний поперечний переріз, причому опорні колеса кожною з пар горизонтальних опор кочення знаходяться в механічному контакті з внутрішніми вертикальними площинами U-подібної шляхової структури.
3. Бойова модульна наземна робототехнічна машина постійного моніторингу і охорони (захисту) стратегічних об'єктів та кордонів держави по пп. 1 і 2, яка відрізняється тим, що кожен з повністю ідентичних елементів шляхової структури виконаний з жорстким вертикальним виступом, розміщеним уздовж подовжньої осі цього елемента, причому опорні колеса кожної з пар горизонтальних опор кочення знаходяться в механічному контакті із зовнішніми вертикальними площинами вказаного вертикального виступу.
4. Бойова модульна наземна робототехнічна машина постійного моніторингу і охорони (захисту) стратегічних об'єктів та кордонів держави по пп.1, 2 і 3, яка відрізняється тим, що ідентичні модулі шляхової структури, що мають П-подібний або трапецієвидний поперечний переріз, встановлені так, щоб коритоподібні порожнини модулів шляхової структури були обернені у бік ґрунту, а транспортний візок робототехнічної машини був розміщений з можливістю подовжнього переміщення на днищах модулів шляхової структури.
5. Бойова модульна наземна робототехнічна машина постійного моніторингу і охорони (захисту) стратегічних об'єктів та кордонів держави по пп.1 і 4, яка відрізняється тим, що ідентичні функціональні блоки-модулі шляхової структури жорстко закріплені на вертикальних опорах, встановлених уздовж траси переміщення робототехнічної машини.
6. Бойова модульна наземна робототехнічна машина постійного моніторингу і охорони (захисту) стратегічних об'єктів та кордонів держави по пп.1 і 4, яка відрізняється тим, що в корпусах ідентичних функціональних блоків-модулів шляхової структури виконані крізні отвори довільної форми, а на поверхнях корпусних модулів шляхової структури, що знаходяться в механічному контакті з вертикальними і бічними опорними колесами транспортного візка, є виступи, ідентичні відповідному рельєфу еластичних покришок опорних коліс.
7. Бойова модульна наземна робототехнічна машина постійного моніторингу і охорони (захисту) стратегічних об'єктів та кордонів держави по пп.1-6, яка відрізняється тим, що до складу модулів шляхової структури включені додаткові ідентичні дугові елементи у вигляді кільцевих секторів з центральними кутами, які дорівнюють кратним частинам прямого кута, причому поперечні перерізи вказаних секторних елементів повністю ідентичні поперечному перерізу кожного з основних лінійних елементів шляхової структури.
8. Бойова модульна наземна робототехнічна машина постійного моніторингу і охорони (захисту) стратегічних об'єктів та кордонів держави по пп.1-7, яка відрізняється тим, що кожен модуль шляхової структури забезпечений щонайменше одним подовжнім жолобом, що закривається кришкою, для укладання високочастотних кабелів управління.
Текст
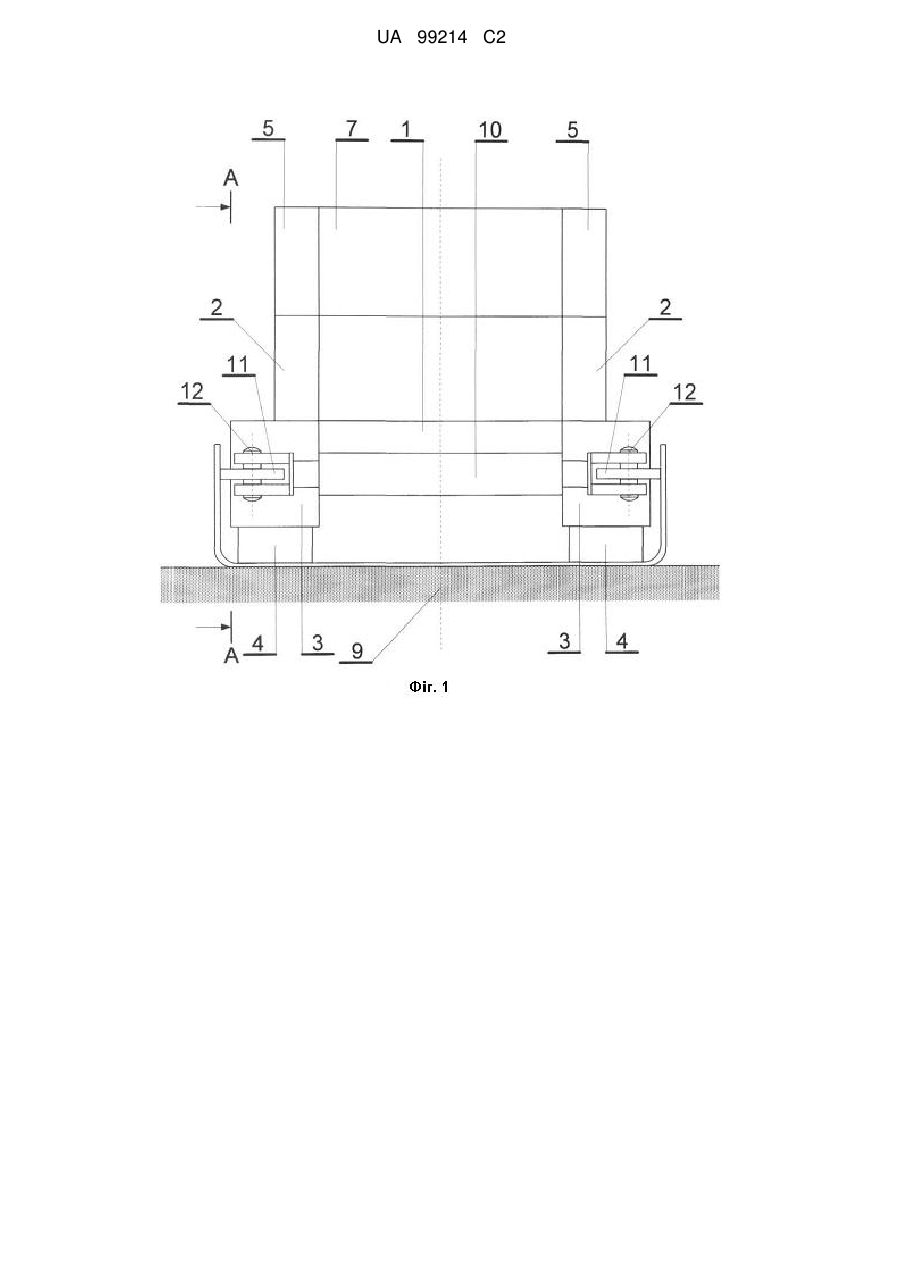
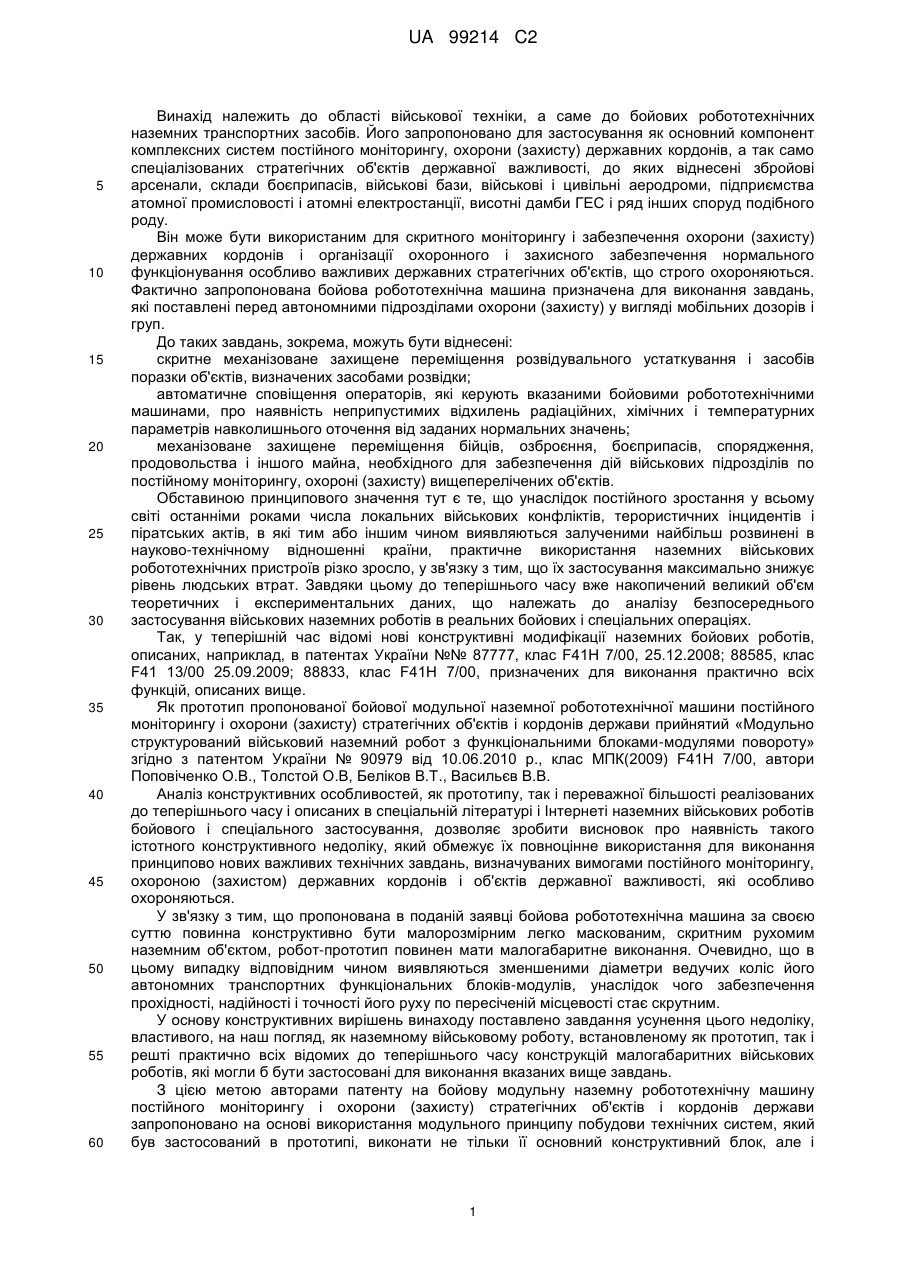
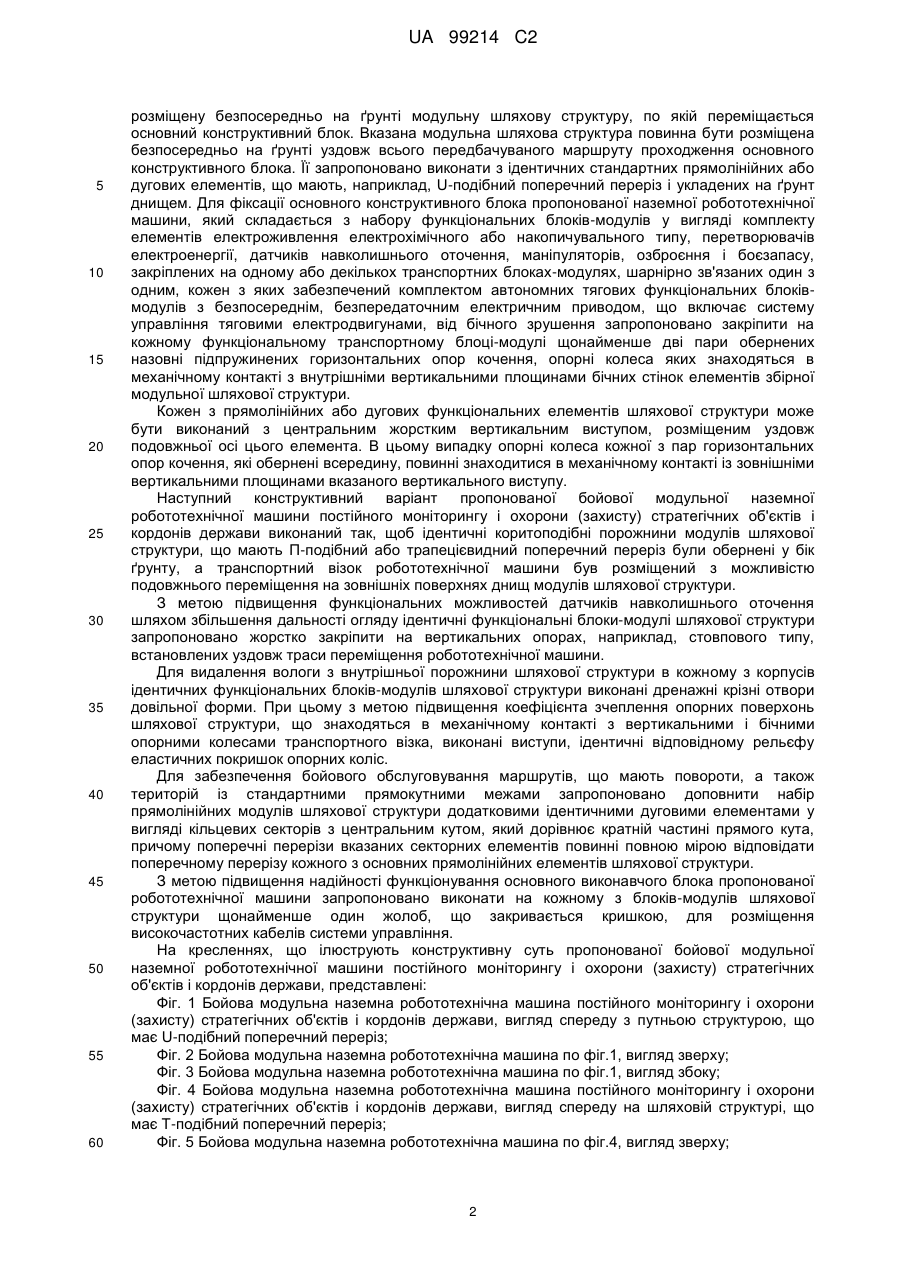
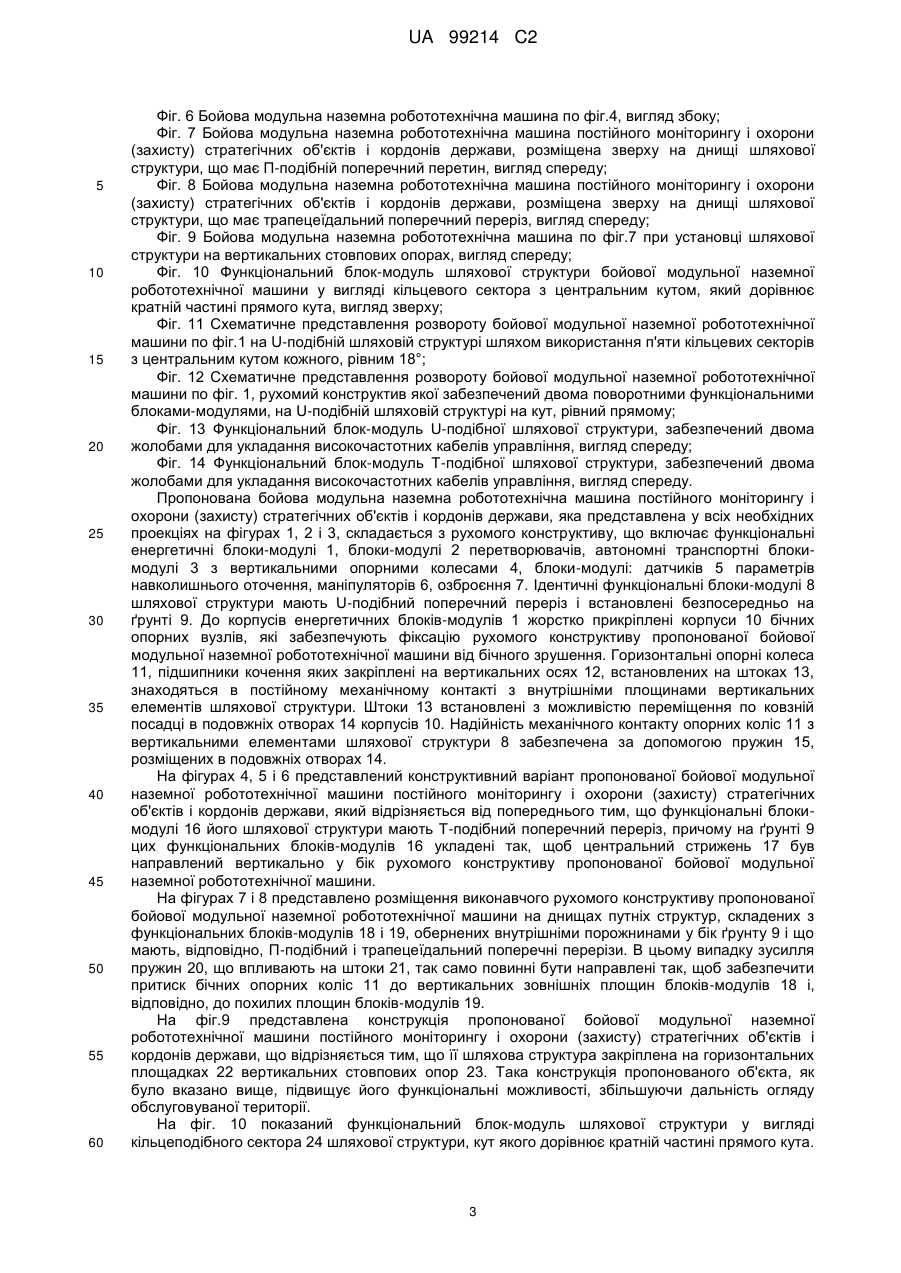
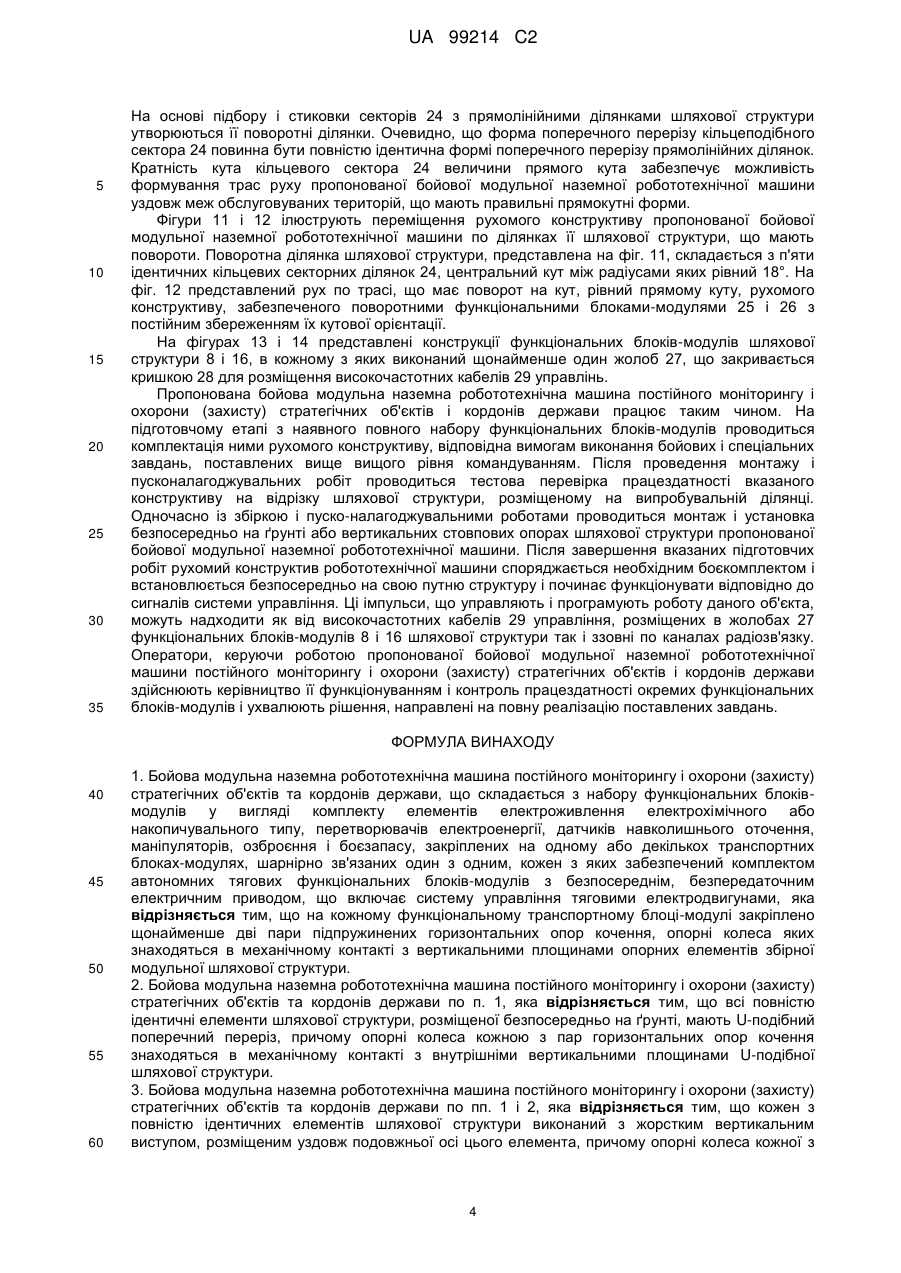
Реферат: Бойова модульна наземна робототехнічна машина постійного моніторингу, охорони (захисту) державних кордонів і стратегічних об'єктів особливої державної важливості складається з двох конструктивно модульноструктурованих компонентів: виконавчого рухомого конструктиву у вигляді малогабаритного модульного наземного військового робота і модульної шляхової структури, закріпленої безпосередньо на ґрунті або спеціальних опорних елементах стовпового типу. Модульні елементи путньої структури можуть мати U-подібне або Т-подібну форму поперечного перерізу. Винахід дозволяє підвищити скритність і адаптацію до особливостей рельєфу місцевості при проведенні заходів щодо постійного моніторингу, охорони (захисту) державних кордонів і стратегічних об'єктів особливої державної важливості. UA 99214 C2 (12) UA 99214 C2 UA 99214 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до області військової техніки, а саме до бойових робототехнічних наземних транспортних засобів. Його запропоновано для застосування як основний компонент комплексних систем постійного моніторингу, охорони (захисту) державних кордонів, а так само спеціалізованих стратегічних об'єктів державної важливості, до яких віднесені збройові арсенали, склади боєприпасів, військові бази, військові і цивільні аеродроми, підприємства атомної промисловості і атомні електростанції, висотні дамби ГЕС і ряд інших споруд подібного роду. Він може бути використаним для скритного моніторингу і забезпечення охорони (захисту) державних кордонів і організації охоронного і захисного забезпечення нормального функціонування особливо важливих державних стратегічних об'єктів, що строго охороняються. Фактично запропонована бойова робототехнічна машина призначена для виконання завдань, які поставлені перед автономними підрозділами охорони (захисту) у вигляді мобільних дозорів і груп. До таких завдань, зокрема, можуть бути віднесені: скритне механізоване захищене переміщення розвідувального устаткування і засобів поразки об'єктів, визначених засобами розвідки; автоматичне сповіщення операторів, які керують вказаними бойовими робототехнічними машинами, про наявність неприпустимих відхилень радіаційних, хімічних і температурних параметрів навколишнього оточення від заданих нормальних значень; механізоване захищене переміщення бійців, озброєння, боєприпасів, спорядження, продовольства і іншого майна, необхідного для забезпечення дій військових підрозділів по постійному моніторингу, охороні (захисту) вищеперелічених об'єктів. Обставиною принципового значення тут є те, що унаслідок постійного зростання у всьому світі останніми роками числа локальних військових конфліктів, терористичних інцидентів і піратських актів, в які тим або іншим чином виявляються залученими найбільш розвинені в науково-технічному відношенні країни, практичне використання наземних військових робототехнічних пристроїв різко зросло, у зв'язку з тим, що їх застосування максимально знижує рівень людських втрат. Завдяки цьому до теперішнього часу вже накопичений великий об'єм теоретичних і експериментальних даних, що належать до аналізу безпосереднього застосування військових наземних роботів в реальних бойових і спеціальних операціях. Так, у теперішній час відомі нові конструктивні модифікації наземних бойових роботів, описаних, наприклад, в патентах України №№ 87777, клас F41H 7/00, 25.12.2008; 88585, клас F41 13/00 25.09.2009; 88833, клас F41H 7/00, призначених для виконання практично всіх функцій, описаних вище. Як прототип пропонованої бойової модульної наземної робототехнічної машини постійного моніторингу і охорони (захисту) стратегічних об'єктів і кордонів держави прийнятий «Модульно структурований військовий наземний робот з функціональними блоками-модулями повороту» згідно з патентом України № 90979 від 10.06.2010 p., клас МПК(2009) F41H 7/00, автори Поповіченко О.В., Толстой О.В, Беліков В.Т., Васильєв В.В. Аналіз конструктивних особливостей, як прототипу, так і переважної більшості реалізованих до теперішнього часу і описаних в спеціальній літературі і Інтернеті наземних військових роботів бойового і спеціального застосування, дозволяє зробити висновок про наявність такого істотного конструктивного недоліку, який обмежує їх повноцінне використання для виконання принципово нових важливих технічних завдань, визначуваних вимогами постійного моніторингу, охороною (захистом) державних кордонів і об'єктів державної важливості, які особливо охороняються. У зв'язку з тим, що пропонована в поданій заявці бойова робототехнічна машина за своєю суттю повинна конструктивно бути малорозмірним легко маскованим, скритним рухомим наземним об'єктом, робот-прототип повинен мати малогабаритне виконання. Очевидно, що в цьому випадку відповідним чином виявляються зменшеними діаметри ведучих коліс його автономних транспортних функціональних блоків-модулів, унаслідок чого забезпечення прохідності, надійності і точності його руху по пересіченій місцевості стає скрутним. У основу конструктивних вирішень винаходу поставлено завдання усунення цього недоліку, властивого, на наш погляд, як наземному військовому роботу, встановленому як прототип, так і решті практично всіх відомих до теперішнього часу конструкцій малогабаритних військових роботів, які могли б бути застосовані для виконання вказаних вище завдань. З цією метою авторами патенту на бойову модульну наземну робототехнічну машину постійного моніторингу і охорони (захисту) стратегічних об'єктів і кордонів держави запропоновано на основі використання модульного принципу побудови технічних систем, який був застосований в прототипі, виконати не тільки її основний конструктивний блок, але і 1 UA 99214 C2 5 10 15 20 25 30 35 40 45 50 55 60 розміщену безпосередньо на ґрунті модульну шляхову структуру, по якій переміщається основний конструктивний блок. Вказана модульна шляхова структура повинна бути розміщена безпосередньо на ґрунті уздовж всього передбачуваного маршруту проходження основного конструктивного блока. Її запропоновано виконати з ідентичних стандартних прямолінійних або дугових елементів, що мають, наприклад, U-подібний поперечний переріз і укладених на ґрунт днищем. Для фіксації основного конструктивного блока пропонованої наземної робототехнічної машини, який складається з набору функціональних блоків-модулів у вигляді комплекту елементів електроживлення електрохімічного або накопичувального типу, перетворювачів електроенергії, датчиків навколишнього оточення, маніпуляторів, озброєння і боєзапасу, закріплених на одному або декількох транспортних блоках-модулях, шарнірно зв'язаних один з одним, кожен з яких забезпечений комплектом автономних тягових функціональних блоківмодулів з безпосереднім, безпередаточним електричним приводом, що включає систему управління тяговими електродвигунами, від бічного зрушення запропоновано закріпити на кожному функціональному транспортному блоці-модулі щонайменше дві пари обернених назовні підпружинених горизонтальних опор кочення, опорні колеса яких знаходяться в механічному контакті з внутрішніми вертикальними площинами бічних стінок елементів збірної модульної шляхової структури. Кожен з прямолінійних або дугових функціональних елементів шляхової структури може бути виконаний з центральним жорстким вертикальним виступом, розміщеним уздовж подовжньої осі цього елемента. В цьому випадку опорні колеса кожної з пар горизонтальних опор кочення, які обернені всередину, повинні знаходитися в механічному контакті із зовнішніми вертикальними площинами вказаного вертикального виступу. Наступний конструктивний варіант пропонованої бойової модульної наземної робототехнічної машини постійного моніторингу і охорони (захисту) стратегічних об'єктів і кордонів держави виконаний так, щоб ідентичні коритоподібні порожнини модулів шляхової структури, що мають П-подібний або трапецієвидний поперечний переріз були обернені у бік ґрунту, а транспортний візок робототехнічної машини був розміщений з можливістю подовжнього переміщення на зовнішніх поверхнях днищ модулів шляхової структури. З метою підвищення функціональних можливостей датчиків навколишнього оточення шляхом збільшення дальності огляду ідентичні функціональні блоки-модулі шляхової структури запропоновано жорстко закріпити на вертикальних опорах, наприклад, стовпового типу, встановлених уздовж траси переміщення робототехнічної машини. Для видалення вологи з внутрішньої порожнини шляхової структури в кожному з корпусів ідентичних функціональних блоків-модулів шляхової структури виконані дренажні крізні отвори довільної форми. При цьому з метою підвищення коефіцієнта зчеплення опорних поверхонь шляхової структури, що знаходяться в механічному контакті з вертикальними і бічними опорними колесами транспортного візка, виконані виступи, ідентичні відповідному рельєфу еластичних покришок опорних коліс. Для забезпечення бойового обслуговування маршрутів, що мають повороти, а також територій із стандартними прямокутними межами запропоновано доповнити набір прямолінійних модулів шляхової структури додатковими ідентичними дуговими елементами у вигляді кільцевих секторів з центральним кутом, який дорівнює кратній частині прямого кута, причому поперечні перерізи вказаних секторних елементів повинні повною мірою відповідати поперечному перерізу кожного з основних прямолінійних елементів шляхової структури. З метою підвищення надійності функціонування основного виконавчого блока пропонованої робототехнічної машини запропоновано виконати на кожному з блоків-модулів шляхової структури щонайменше один жолоб, що закривається кришкою, для розміщення високочастотних кабелів системи управління. На кресленнях, що ілюструють конструктивну суть пропонованої бойової модульної наземної робототехнічної машини постійного моніторингу і охорони (захисту) стратегічних об'єктів і кордонів держави, представлені: Фіг. 1 Бойова модульна наземна робототехнічна машина постійного моніторингу і охорони (захисту) стратегічних об'єктів і кордонів держави, вигляд спереду з путньою структурою, що має U-подібний поперечний переріз; Фіг. 2 Бойова модульна наземна робототехнічна машина по фіг.1, вигляд зверху; Фіг. 3 Бойова модульна наземна робототехнічна машина по фіг.1, вигляд збоку; Фіг. 4 Бойова модульна наземна робототехнічна машина постійного моніторингу і охорони (захисту) стратегічних об'єктів і кордонів держави, вигляд спереду на шляховій структурі, що має Т-подібний поперечний переріз; Фіг. 5 Бойова модульна наземна робототехнічна машина по фіг.4, вигляд зверху; 2 UA 99214 C2 5 10 15 20 25 30 35 40 45 50 55 60 Фіг. 6 Бойова модульна наземна робототехнічна машина по фіг.4, вигляд збоку; Фіг. 7 Бойова модульна наземна робототехнічна машина постійного моніторингу і охорони (захисту) стратегічних об'єктів і кордонів держави, розміщена зверху на днищі шляхової структури, що має П-подібній поперечний перетин, вигляд спереду; Фіг. 8 Бойова модульна наземна робототехнічна машина постійного моніторингу і охорони (захисту) стратегічних об'єктів і кордонів держави, розміщена зверху на днищі шляхової структури, що має трапецеїдальний поперечний переріз, вигляд спереду; Фіг. 9 Бойова модульна наземна робототехнічна машина по фіг.7 при установці шляхової структури на вертикальних стовпових опорах, вигляд спереду; Фіг. 10 Функціональний блок-модуль шляхової структури бойової модульної наземної робототехнічної машини у вигляді кільцевого сектора з центральним кутом, який дорівнює кратній частині прямого кута, вигляд зверху; Фіг. 11 Схематичне представлення розвороту бойової модульної наземної робототехнічної машини по фіг.1 на U-подібній шляховій структурі шляхом використання п'яти кільцевих секторів з центральним кутом кожного, рівним 18°; Фіг. 12 Схематичне представлення розвороту бойової модульної наземної робототехнічної машини по фіг. 1, рухомий конструктив якої забезпечений двома поворотними функціональними блоками-модулями, на U-подібній шляховій структурі на кут, рівний прямому; Фіг. 13 Функціональний блок-модуль U-подібної шляхової структури, забезпечений двома жолобами для укладання високочастотних кабелів управління, вигляд спереду; Фіг. 14 Функціональний блок-модуль Т-подібної шляхової структури, забезпечений двома жолобами для укладання високочастотних кабелів управління, вигляд спереду. Пропонована бойова модульна наземна робототехнічна машина постійного моніторингу і охорони (захисту) стратегічних об'єктів і кордонів держави, яка представлена у всіх необхідних проекціях на фігурах 1, 2 і 3, складається з рухомого конструктиву, що включає функціональні енергетичні блоки-модулі 1, блоки-модулі 2 перетворювачів, автономні транспортні блокимодулі 3 з вертикальними опорними колесами 4, блоки-модулі: датчиків 5 параметрів навколишнього оточення, маніпуляторів 6, озброєння 7. Ідентичні функціональні блоки-модулі 8 шляхової структури мають U-подібний поперечний переріз і встановлені безпосередньо на ґрунті 9. До корпусів енергетичних блоків-модулів 1 жорстко прикріплені корпуси 10 бічних опорних вузлів, які забезпечують фіксацію рухомого конструктиву пропонованої бойової модульної наземної робототехнічної машини від бічного зрушення. Горизонтальні опорні колеса 11, підшипники кочення яких закріплені на вертикальних осях 12, встановлених на штоках 13, знаходяться в постійному механічному контакті з внутрішніми площинами вертикальних елементів шляхової структури. Штоки 13 встановлені з можливістю переміщення по ковзній посадці в подовжніх отворах 14 корпусів 10. Надійність механічного контакту опорних коліс 11 з вертикальними елементами шляхової структури 8 забезпечена за допомогою пружин 15, розміщених в подовжніх отворах 14. На фігурах 4, 5 і 6 представлений конструктивний варіант пропонованої бойової модульної наземної робототехнічної машини постійного моніторингу і охорони (захисту) стратегічних об'єктів і кордонів держави, який відрізняється від попереднього тим, що функціональні блокимодулі 16 його шляхової структури мають Т-подібний поперечний переріз, причому на ґрунті 9 цих функціональних блоків-модулів 16 укладені так, щоб центральний стрижень 17 був направлений вертикально у бік рухомого конструктиву пропонованої бойової модульної наземної робототехнічної машини. На фігурах 7 і 8 представлено розміщення виконавчого рухомого конструктиву пропонованої бойової модульної наземної робототехнічної машини на днищах путніх структур, складених з функціональних блоків-модулів 18 і 19, обернених внутрішніми порожнинами у бік ґрунту 9 і що мають, відповідно, П-подібний і трапецеїдальний поперечні перерізи. В цьому випадку зусилля пружин 20, що впливають на штоки 21, так само повинні бути направлені так, щоб забезпечити притиск бічних опорних коліс 11 до вертикальних зовнішніх площин блоків-модулів 18 і, відповідно, до похилих площин блоків-модулів 19. На фіг.9 представлена конструкція пропонованої бойової модульної наземної робототехнічної машини постійного моніторингу і охорони (захисту) стратегічних об'єктів і кордонів держави, що відрізняється тим, що її шляхова структура закріплена на горизонтальних площадках 22 вертикальних стовпових опор 23. Така конструкція пропонованого об'єкта, як було вказано вище, підвищує його функціональні можливості, збільшуючи дальність огляду обслуговуваної території. На фіг. 10 показаний функціональний блок-модуль шляхової структури у вигляді кільцеподібного сектора 24 шляхової структури, кут якого дорівнює кратній частині прямого кута. 3 UA 99214 C2 5 10 15 20 25 30 35 На основі підбору і стиковки секторів 24 з прямолінійними ділянками шляхової структури утворюються її поворотні ділянки. Очевидно, що форма поперечного перерізу кільцеподібного сектора 24 повинна бути повністю ідентична формі поперечного перерізу прямолінійних ділянок. Кратність кута кільцевого сектора 24 величини прямого кута забезпечує можливість формування трас руху пропонованої бойової модульної наземної робототехнічної машини уздовж меж обслуговуваних територій, що мають правильні прямокутні форми. Фігури 11 і 12 ілюструють переміщення рухомого конструктиву пропонованої бойової модульної наземної робототехнічної машини по ділянках її шляхової структури, що мають повороти. Поворотна ділянка шляхової структури, представлена на фіг. 11, складається з п'яти ідентичних кільцевих секторних ділянок 24, центральний кут між радіусами яких рівний 18°. На фіг. 12 представлений рух по трасі, що має поворот на кут, рівний прямому куту, рухомого конструктиву, забезпеченого поворотними функціональними блоками-модулями 25 і 26 з постійним збереженням їх кутової орієнтації. На фігурах 13 і 14 представлені конструкції функціональних блоків-модулів шляхової структури 8 і 16, в кожному з яких виконаний щонайменше один жолоб 27, що закривається кришкою 28 для розміщення високочастотних кабелів 29 управлінь. Пропонована бойова модульна наземна робототехнічна машина постійного моніторингу і охорони (захисту) стратегічних об'єктів і кордонів держави працює таким чином. На підготовчому етапі з наявного повного набору функціональних блоків-модулів проводиться комплектація ними рухомого конструктиву, відповідна вимогам виконання бойових і спеціальних завдань, поставлених вище вищого рівня командуванням. Після проведення монтажу і пусконалагоджувальних робіт проводиться тестова перевірка працездатності вказаного конструктиву на відрізку шляхової структури, розміщеному на випробувальній ділянці. Одночасно із збіркою і пуско-налагоджувальними роботами проводиться монтаж і установка безпосередньо на ґрунті або вертикальних стовпових опорах шляхової структури пропонованої бойової модульної наземної робототехнічної машини. Після завершення вказаних підготовчих робіт рухомий конструктив робототехнічної машини споряджається необхідним боєкомплектом і встановлюється безпосередньо на свою путню структуру і починає функціонувати відповідно до сигналів системи управління. Ці імпульси, що управляють і програмують роботу даного об'єкта, можуть надходити як від високочастотних кабелів 29 управління, розміщених в жолобах 27 функціональних блоків-модулів 8 і 16 шляхової структури так і ззовні по каналах радіозв'язку. Оператори, керуючи роботою пропонованої бойової модульної наземної робототехнічної машини постійного моніторингу і охорони (захисту) стратегічних об'єктів і кордонів держави здійснюють керівництво її функціонуванням і контроль працездатності окремих функціональних блоків-модулів і ухвалюють рішення, направлені на повну реалізацію поставлених завдань. ФОРМУЛА ВИНАХОДУ 40 45 50 55 60 1. Бойова модульна наземна робототехнічна машина постійного моніторингу і охорони (захисту) стратегічних об'єктів та кордонів держави, що складається з набору функціональних блоківмодулів у вигляді комплекту елементів електроживлення електрохімічного або накопичувального типу, перетворювачів електроенергії, датчиків навколишнього оточення, маніпуляторів, озброєння і боєзапасу, закріплених на одному або декількох транспортних блоках-модулях, шарнірно зв'язаних один з одним, кожен з яких забезпечений комплектом автономних тягових функціональних блоків-модулів з безпосереднім, безпередаточним електричним приводом, що включає систему управління тяговими електродвигунами, яка відрізняється тим, що на кожному функціональному транспортному блоці-модулі закріплено щонайменше дві пари підпружинених горизонтальних опор кочення, опорні колеса яких знаходяться в механічному контакті з вертикальними площинами опорних елементів збірної модульної шляхової структури. 2. Бойова модульна наземна робототехнічна машина постійного моніторингу і охорони (захисту) стратегічних об'єктів та кордонів держави по п. 1, яка відрізняється тим, що всі повністю ідентичні елементи шляхової структури, розміщеної безпосередньо на ґрунті, мають U-подібний поперечний переріз, причому опорні колеса кожною з пар горизонтальних опор кочення знаходяться в механічному контакті з внутрішніми вертикальними площинами U-подібної шляхової структури. 3. Бойова модульна наземна робототехнічна машина постійного моніторингу і охорони (захисту) стратегічних об'єктів та кордонів держави по пп. 1 і 2, яка відрізняється тим, що кожен з повністю ідентичних елементів шляхової структури виконаний з жорстким вертикальним виступом, розміщеним уздовж подовжньої осі цього елемента, причому опорні колеса кожної з 4 UA 99214 C2 5 10 15 20 25 пар горизонтальних опор кочення знаходяться в механічному контакті із зовнішніми вертикальними площинами вказаного вертикального виступу. 4. Бойова модульна наземна робототехнічна машина постійного моніторингу і охорони (захисту) стратегічних об'єктів та кордонів держави по пп.1, 2 і 3, яка відрізняється тим, що ідентичні модулі шляхової структури, що мають П-подібний або трапецієвидний поперечний переріз, встановлені так, щоб коритоподібні порожнини модулів шляхової структури були обернені у бік ґрунту, а транспортний візок робототехнічної машини був розміщений з можливістю подовжнього переміщення на днищах модулів шляхової структури. 5. Бойова модульна наземна робототехнічна машина постійного моніторингу і охорони (захисту) стратегічних об'єктів та кордонів держави по пп.1 і 4, яка відрізняється тим, що ідентичні функціональні блоки-модулі шляхової структури жорстко закріплені на вертикальних опорах, встановлених уздовж траси переміщення робототехнічної машини. 6. Бойова модульна наземна робототехнічна машина постійного моніторингу і охорони (захисту) стратегічних об'єктів та кордонів держави по пп.1 і 4, яка відрізняється тим, що в корпусах ідентичних функціональних блоків-модулів шляхової структури виконані крізні отвори довільної форми, а на поверхнях корпусних модулів шляхової структури, що знаходяться в механічному контакті з вертикальними і бічними опорними колесами транспортного візка, є виступи, ідентичні відповідному рельєфу еластичних покришок опорних коліс. 7. Бойова модульна наземна робототехнічна машина постійного моніторингу і охорони (захисту) стратегічних об'єктів та кордонів держави по пп.1-6, яка відрізняється тим, що до складу модулів шляхової структури включені додаткові ідентичні дугові елементи у вигляді кільцевих секторів з центральними кутами, які дорівнюють кратним частинам прямого кута, причому поперечні перерізи вказаних секторних елементів повністю ідентичні поперечному перерізу кожного з основних лінійних елементів шляхової структури. 8. Бойова модульна наземна робототехнічна машина постійного моніторингу і охорони (захисту) стратегічних об'єктів та кордонів держави по пп.1-7, яка відрізняється тим, що кожен модуль шляхової структури забезпечений щонайменше одним подовжнім жолобом, що закривається кришкою, для укладання високочастотних кабелів управління. 5 UA 99214 C2 6 UA 99214 C2 7 UA 99214 C2 8 UA 99214 C2 9 UA 99214 C2 10 UA 99214 C2 11 UA 99214 C2 Комп’ютерна верстка Л.Литвиненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 12
ДивитисяДодаткова інформація
Назва патенту англійськоюFighting module surface robot-technical machine for permanent monitoring and protection (defense) of strategic objects and boundaries of state
Автори англійськоюTolstoi Oleksii Volodymyrovych, Klymenko Vadym Mykolaiovych, Koval Andrii Andriiovych, Belikov Viktor Tryfonovych, Hrachov Mykola Mykolaiovych, Vasyliev Valerii Valentynovych
Назва патенту російськоюБоевая модульная наземная робототехническая машина постоянного мониторинга и охраны (защиты) стратегических объектов и границ государства
Автори російськоюТолстой Алексей Владимирович, Клименко Вадим Николаевич, Коваль Андрей Андреевич, Беликов Виктор Трифонович, Грачев Николай Николаевич, Грачов Николай Николаевич, Васильев Валерий Валентинович
МПК / Мітки
МПК: F41H 7/00
Мітки: моніторингу, машина, робототехнічна, об'єктів, охорони, бойова, стратегічних, держави, модульна, захисту, кордонів, постійного, наземна
Код посилання
<a href="https://ua.patents.su/14-99214-bojjova-modulna-nazemna-robototekhnichna-mashina-postijjnogo-monitoringu-i-okhoroni-zakhistu-strategichnikh-obehktiv-ta-kordoniv-derzhavi.html" target="_blank" rel="follow" title="База патентів України">Бойова модульна наземна робототехнічна машина постійного мониторингу і охорони (захисту) стратегічних об`єктів та кордонів держави</a>
Модульно-структурована допоміжна наземна бойова робототехнічна машина прихованого супроводження розвідників
Номер патенту: 95730
Опубліковано: 25.08.2011
Автори: Беліков Віктор Тріфонович, Поповіченко Олександр Вікторович, Толстой Олексій Володимирович, Васильєв Валерій Валентинович, Клименко Вадим Миколайович
МПК: F41H 7/00
Мітки: прихованого, машина, модульно-структурована, розвідників, супроводження, допоміжна, робототехнічна, бойова, наземна
Формула / Реферат:
1. Модульно-структурована допоміжна наземна бойова робототехнічна машина скритного супроводження розвідників, що складається з одного або двох силових блоків-модулів, забезпечених електрохімічними, конденсаторними або комбінованими джерелами електричної енергії, її перетворювачами для живлення тягових електричних двигунів гусеничного рушія і решти споживачів електричної енергії, комплексом датчиків системи тягового електроприводу, зовнішньої...
Модульно структурована допоміжна наземна бойова робототехнічна машина супроводження бронетанкового озброєння і техніки
Номер патенту: 99033
Опубліковано: 10.07.2012
Автори: Магерамов Лютфалій Курбан-Алієвич, Дяченко Олександр Феодосійович, Толстой Олексій Володимирович, Беліков Віктор Тріфонович, Лещенко Олег Іванович, Борисюк Михайло Дем'янович, Клименко Вадим Миколайович, Янчик Олександр Григорович
МПК: F41H 7/02, B65D 85/68
Мітки: машина, робототехнічна, допоміжна, супроводження, техніки, озброєння, модульної, наземна, структурована, бронетанкового, бойова
Формула / Реферат:
1. Модульно структурована наземна допоміжна бойова робототехнічна машина супроводження бронетанкового озброєння і техніки, основний виконавчий агрегат якої складається з енергетичного блока-модуля у вигляді комплекту статичних джерел електричної енергії електрохімічного, конденсаторного або комбінованого типу, статичних перетворювачів електроенергії, електромеханічних колісних, гусеничних або колісно-гусеничних рушіїв у вигляді автономних...
Допоміжна наземна бойова робототехнічна машина прихованого супроводу розвідників з повністю автономними транспортними блоками-модулями

Номер патенту: 96693
Опубліковано: 25.11.2011
Автори: Поповіченко Олександр Вікторович, Толстой Олексій Володимирович, Васильєв Валерій Валентинович, Беліков Віктор Тріфонович, Клименко Вадим Миколайович
МПК: F41H 7/00
Мітки: повністю, робототехнічна, машина, транспортними, розвідників, бойова, автономними, супроводу, допоміжна, прихованого, наземна, блоками-модулями
Формула / Реферат:
1. Наземна допоміжна бойова робототехнічна машина прихованого супроводу розвідників з повністю автономними транспортними блоками-модулями, що складається з набору шарнірно об'єднаних транспортних візків-траків у вигляді плоских платформ з кронштейнами, що несуть опорні колеса візків-траків, сполучених шарнірами, елементів електроживлення електрохімічного або накопичувального типу у вигляді суперконденсаторів, перетворювачів електроенергії,...
Спосіб захисту й охорони об’єктів з боку водного масиву від проникнення сторонньої особи і пристрій для його здійснення
Номер патенту: 65255
Опубліковано: 15.03.2004
Автори: Киклевич Юрій Миколайович, Амітан Веніамін Наумович, Мнухін Анатолій Григорович
МПК: G08B 15/00
Мітки: особи, проникнення, охорони, сторонньої, водного, захисту, здійснення, боку, масиву, спосіб, пристрій, об'єктів
Формула / Реферат:
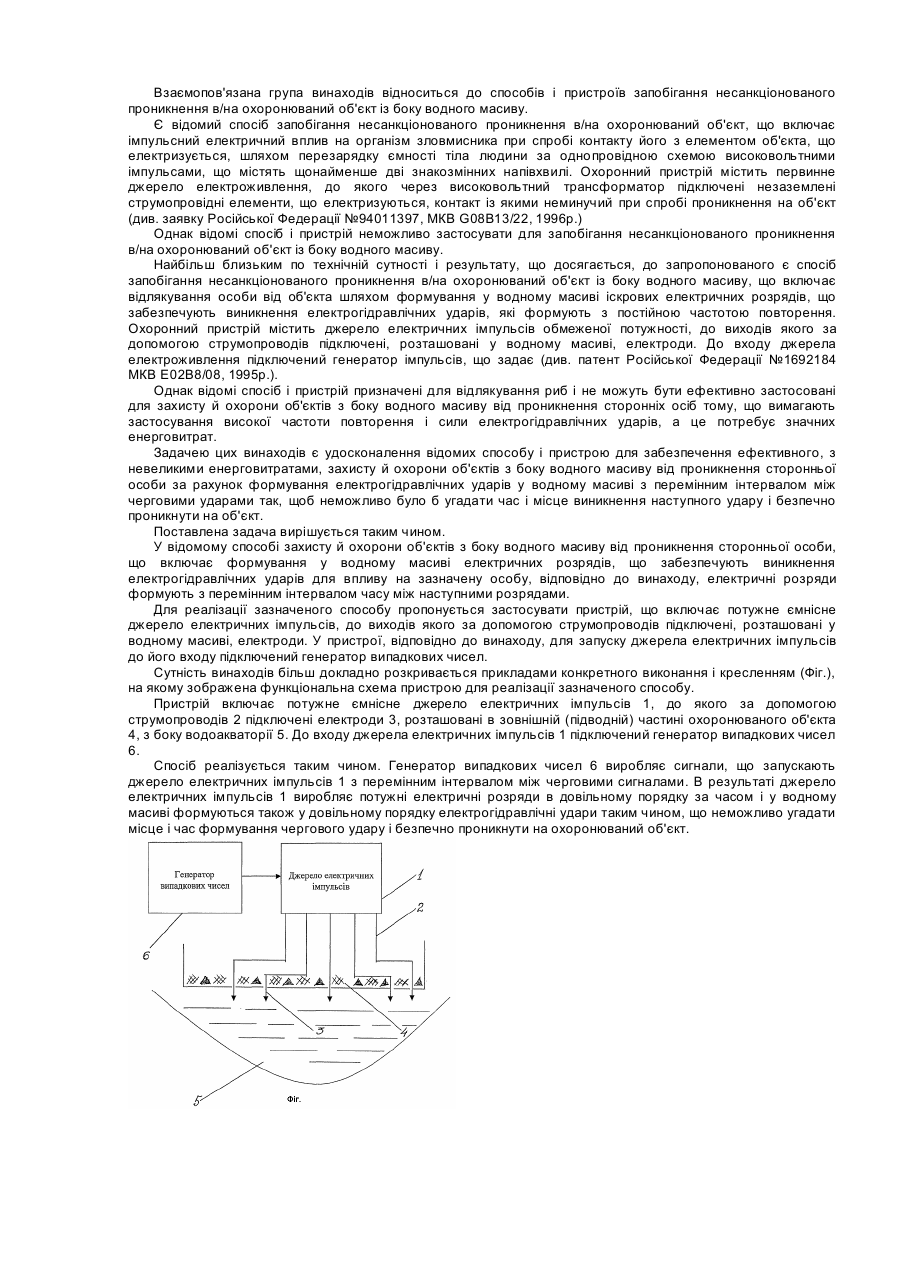
1.Спосіб захисту й охорони об'єктів з боку водного масиву від проникнення сторонньої особи, що включає формування у водному масиві електричних розрядів, що забезпечують виникнення електрогідравлічних ударів для впливу на сторонню особу, який відрізняється тим, що електричні розряди формують із змінним інтервалом часу між наступними розрядами.2. Пристрій для захисту й охорони об'єктів з боку водного масиву від проникнення сторонньої...
Бойова машина
Номер патенту: 43494
Опубліковано: 17.12.2001
Автор: СИДОРЕНКО Володимир Якович
МПК: B62D 63/00, F41A 23/00
Формула / Реферат:
1. Бойова машина, що має в своєму складі броньовий корпус, поділений на дві частини, 2/3 якого - бойовий відділ, у верхній частині корпусу розміщена башта, а в задній частині розміщений двигун, та вогневий засіб, трансмісію, що зв'язана з ходовою частиною, яка відрізняється тим, що вогневий засіб розміщений в нижній частині корпусу, на дно якого встановлений піднімальний механізм, на верхній підвалині якого закріплене коло у вигляді...
Попередній патент: Бузковий керамічний пігмент
Наступний патент: Відцентровий асинхронний насос
Випадковий патент: Спосіб модифікації деревини