Модульно-структурована допоміжна наземна бойова робототехнічна машина прихованого супроводження розвідників
Номер патенту: 95730
Опубліковано: 25.08.2011
Автори: Поповіченко Олександр Вікторович, Клименко Вадим Миколайович, Толстой Олексій Володимирович, Васильєв Валерій Валентинович, Беліков Віктор Тріфонович
Формула / Реферат
1. Модульно-структурована допоміжна наземна бойова робототехнічна машина скритного супроводження розвідників, що складається з одного або двох силових блоків-модулів, забезпечених електрохімічними, конденсаторними або комбінованими джерелами електричної енергії, її перетворювачами для живлення тягових електричних двигунів гусеничного рушія і решти споживачів електричної енергії, комплексом датчиків системи тягового електроприводу, зовнішньої обстановки і діагностики, бортовим комп'ютером, а так само комплектом виконавчих механізмів, зокрема маніпуляторами, системами озброєння і самоліквідації, яка відрізняється тим, що гнучка вантажна платформа робота, шарнірно пов'язана з одним або двома силовими блоками-модулями, виконана у вигляді набору розміщених подовжньо шарнірно сполучених один з одним плоских елементів, кожен з яких несе щонайменше одну пару опорних коліс, що знаходяться в механічному контакті з суцільними гнучкими гусеницями гусеничного рушія, безпередаточний електромеханічний привід кожної з яких складається з двох тягових двигунів.
2. Модульно-структурована допоміжна наземна бойова робототехнічна машина скритного супроводження розвідників за п. 1, яка відрізняється тим, що силові блоки-модулі робота шарнірно приєднані до головного і хвостового пласким елементом, що входять до складу гнучкої вантажної платформи.
3. Модульно-структурована допоміжна наземна бойова робототехнічна машина скритного супроводження розвідників за пп. 1, 2, яка відрізняється тим, що механізми приводу гусениць забезпечені важелями зовнішнього механічного обертання.
4. Модульно-структурована допоміжна наземна бойова робототехнічна машина скритного супроводження розвідників за пп. 1, 2 і 3, яка відрізняється тим, що головний і хвостовий силові блоки-модулі робота забезпечені автономними парами гнучких гусениць.
5. Модульно-структурована допоміжна наземна бойова робототехнічна машина скритного супроводження розвідників за пп. 1, 2 і 3, яка відрізняється тим, що гнучкі гусениці виконані у вигляді гофрованих гнучких композитних або металевих труб круглого або прямокутного перерізу.
Текст
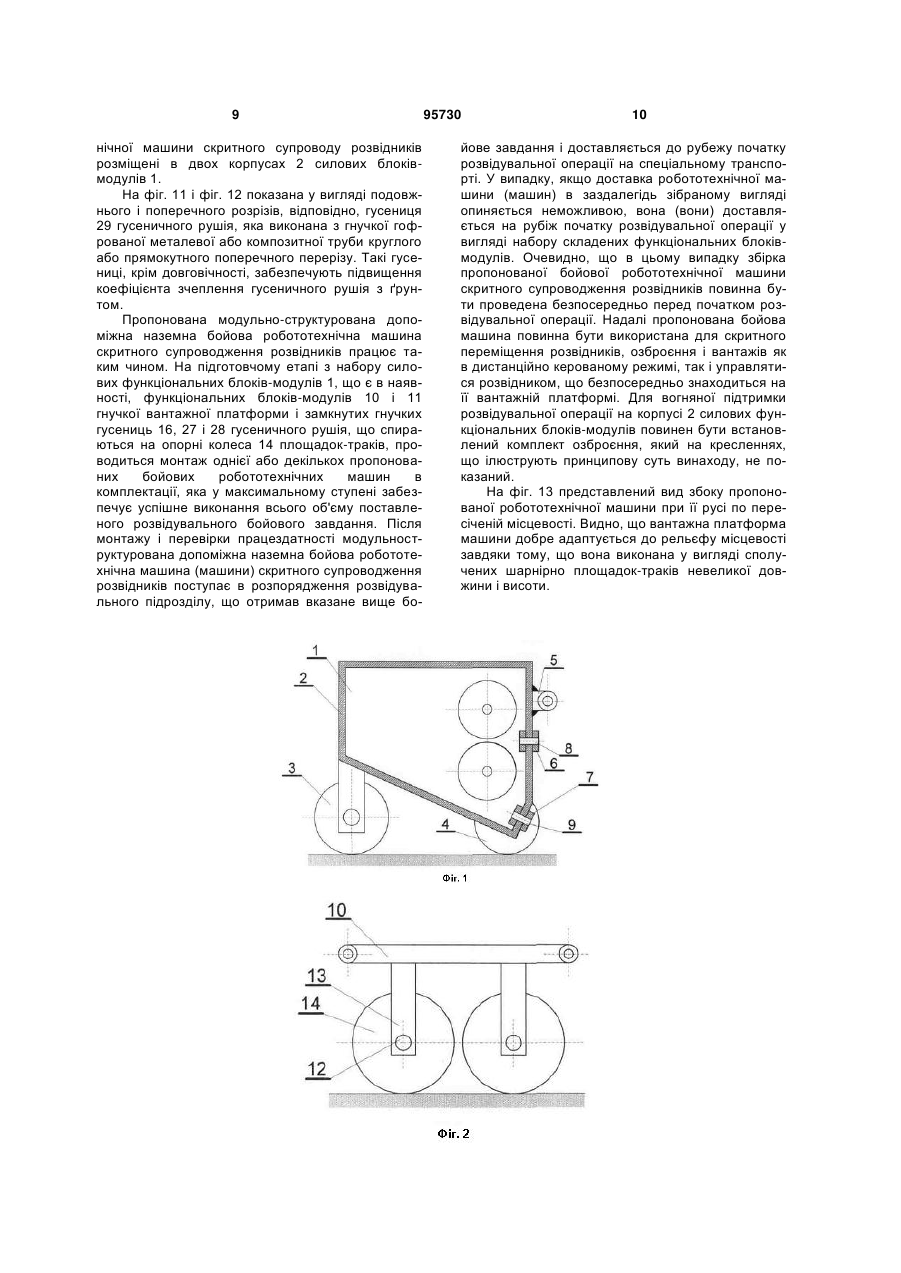
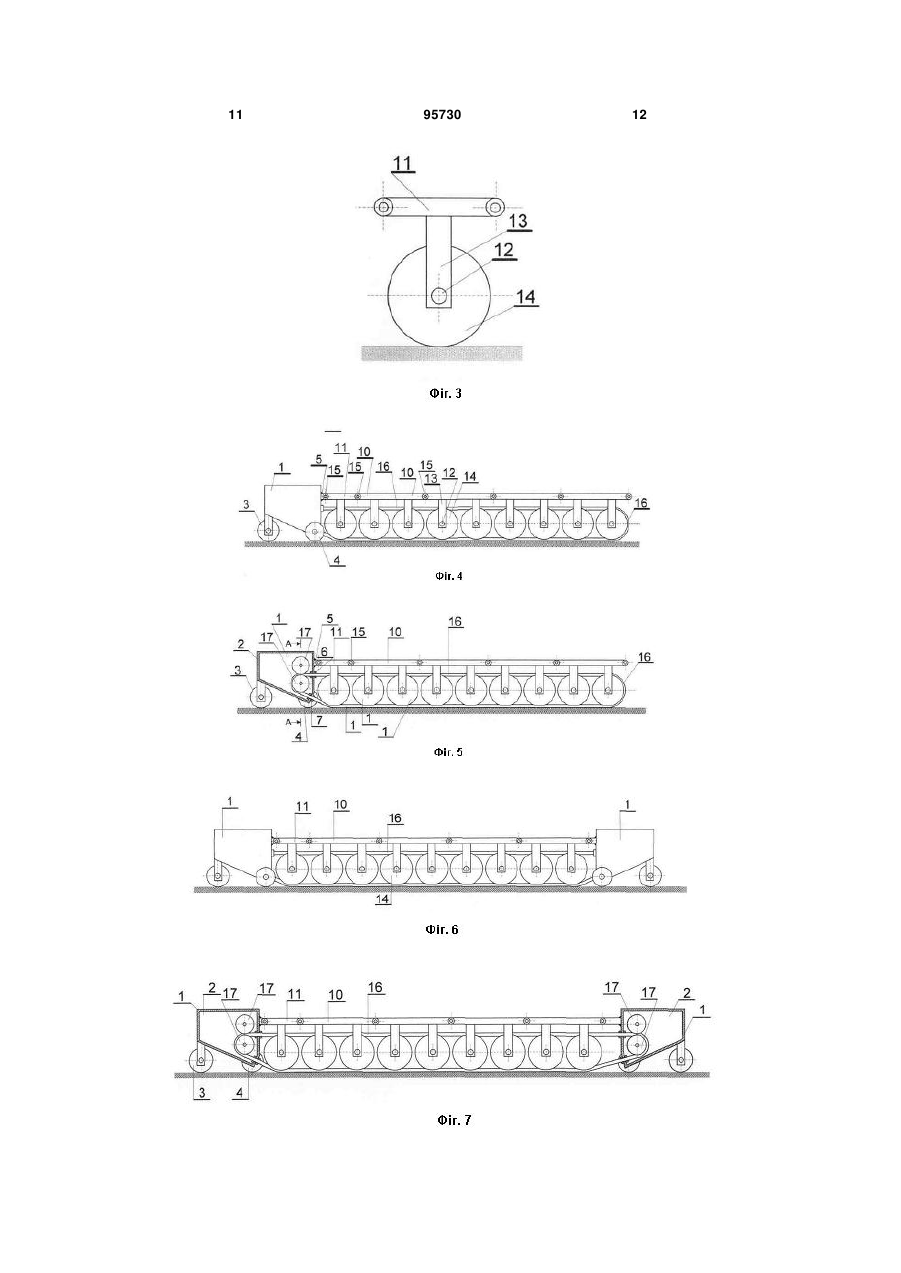
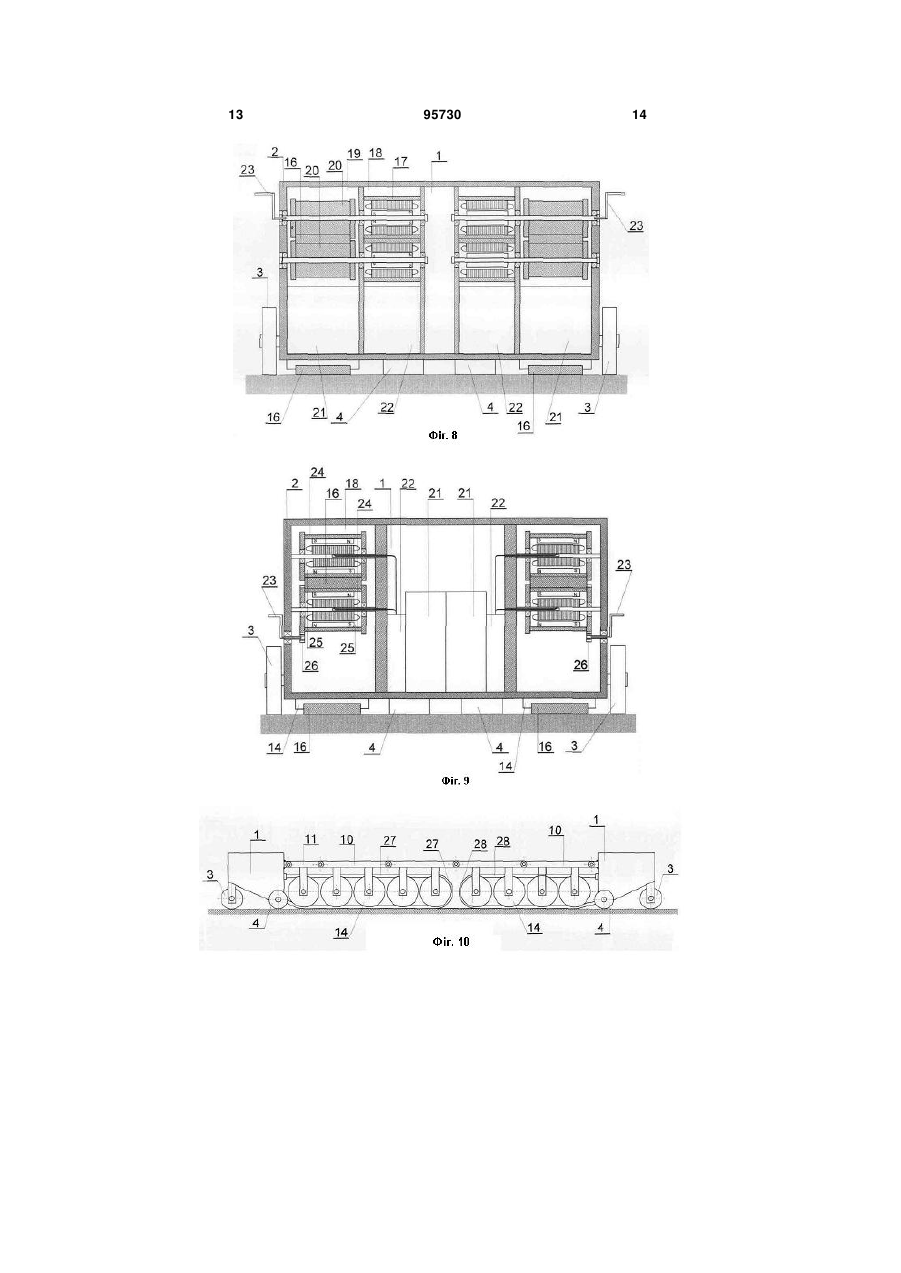
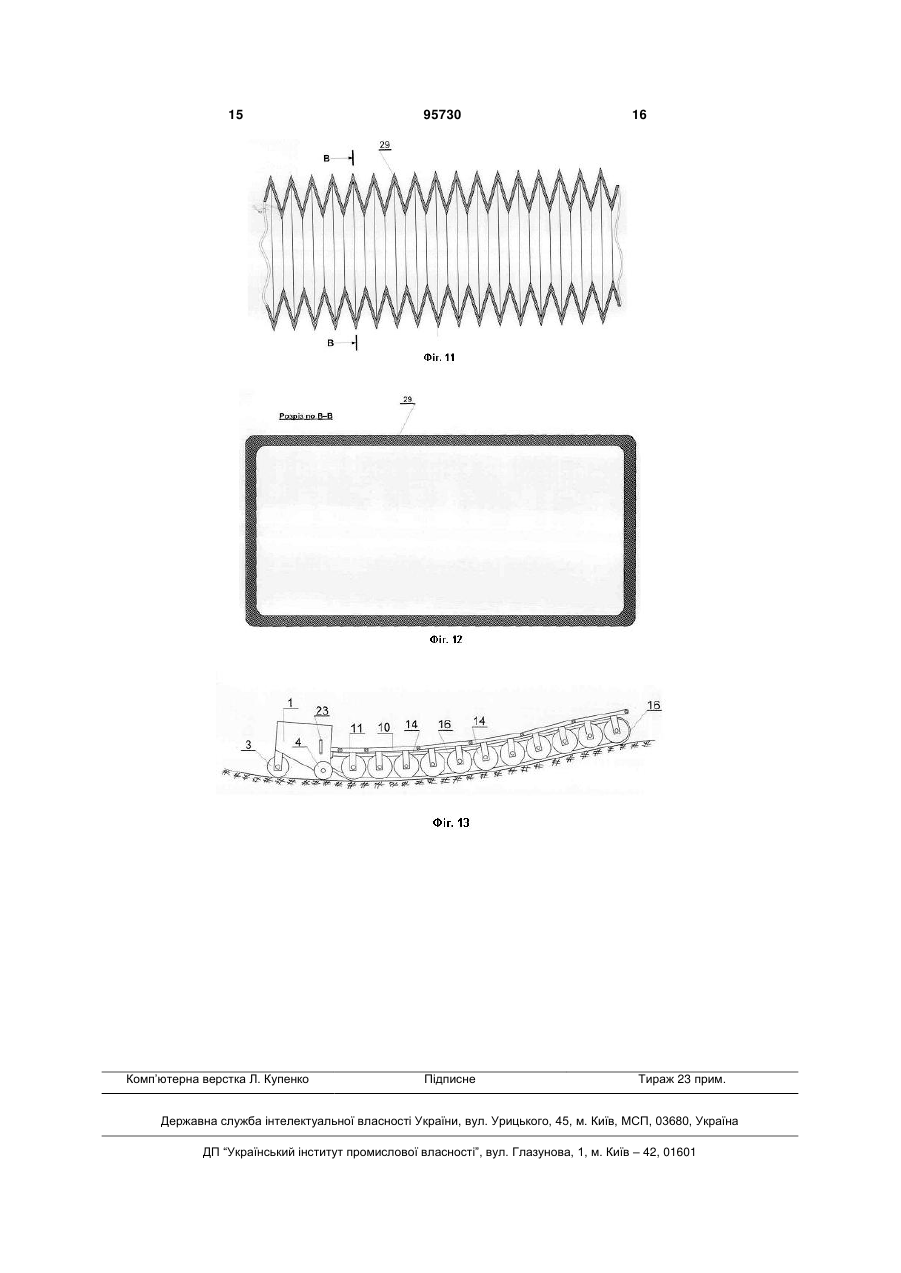
1. Модульно-структурована допоміжна наземна бойова робототехнічна машина скритного супроводження розвідників, що складається з одного або двох силових блоків-модулів, забезпечених електрохімічними, конденсаторними або комбінованими джерелами електричної енергії, її перетворювачами для живлення тягових електричних двигунів гусеничного рушія і решти споживачів електричної енергії, комплексом датчиків системи тягового електроприводу, зовнішньої обстановки і діагностики, бортовим комп'ютером, а так само комплектом виконавчих механізмів, зокрема маніпуляторами, системами озброєння і самоліквідації, яка відрізняється тим, що гнучка вантажна плат C2 2 (19) 1 3 виявлення і нейтралізація окремих мін і вибухових речовин, пророблення проходів в мінних загородах і інших перешкодах; виявлення поранених і евакуація їх з місць бойових зіткнень; автономне функціонування в заражених і труднодоступних для техніки районах; забезпечення окремих етапів диверсійної роботи і ряду інших завдань, що виконуються підрозділами спеціального призначення. Обставиною принципового значення тут є те, що унаслідок постійного зростання у всьому світі останніми роками числа локальних військових конфліктів, терористичних інцидентів і піратських актів, в які тим або іншим чином виявляються залученими найбільш розвинені в науковотехнічному відношенні країни, практичне використання наземних військових робототехнічних пристроїв різко зросло, у зв'язку з тим, що їх застосування в максимально можливому ступені знижує рівень людських втрат. Завдяки цьому до теперішнього часу вже накопичений великий об'єм теоретичних і експериментальних даних, що належать до аналізу безпосереднього застосування військових наземних роботів в реальних бойових і спеціальних операціях. Так, наприклад, відомі військові роботи, описані в опублікованих в Інтернеті російським інформаційним виданням CitCity 06-07.11.2007 року матеріалах «Боевые сухопутные роботы» (см http://www citcity.ru), які достатньо широко застосовуються розвиненими в технічному відношенні країнами для виконання практично всіх функцій, описаних вище. У цих матеріалах виділяються американські військові роботи сімейства PacBot, що застосовуються для розмінування, а так само роботи Tags і REDOWL. У Ізраїлі, Великобританії і Германії розроблені і знайшли військове застосування рухомі гусеничні роботи для розвідки, розмінування і знищення вибухових пристроїв різного типу. Армія США під час бойових дій і поліцейських операцій в Іраку з успіхом використовувала озброєні вогнепальною зброєю малогабаритні гусеничні роботи в наступальних і розвідувальних операціях. Загальна кількість військових роботів, використаних армією США в Іраку до кінця 2008 року, досягала 4000 одиниць. На державному рівні розробкою і практичним використанням військових роботів займаються в Росії, Франції, Великобританії і Японії. Як прототип пропонованої модульноструктурованої допоміжної наземної бойової робототехнічної машини скритного супроводження розвідників прийнятий «Здвоєний модульноструктурований військовий наземний робот» згідно з патентом України № 88833 від 25.11.2009 р., клас-МПК (2009) F41H 7/00, автори Беліков В.Т., Лещенко 0.1., Поповіченко О.В., Толстой О.В. Аналіз конструктивних особливостей, як прототипу, так і реалізованих до теперішнього часу і описаних в спеціальній літературі і Інтернеті наземних військових роботів бойового і спеціального застосування, дозволяє зробити висновок про ряд загальних принципових технічних недоліків, властивих 95730 4 в цілому цьому специфічному виду військової техніки. До них можна віднести наступні: прототип, так само як і інші відомі конструкції військових наземних роботів малого і середнього габаритів не відповідає вимогам, відповідно до яких він міг би бути віднесений до малорозмірних скритних рухомих бойових об'єктів, унаслідок чого збільшена вірогідність виявлення подібних об'єктів супротивником. Очевидно, що з цієї причини значно зростає відсоток вогняної поразки подібних роботів в ході бойових дій; прототип не пристосований для скритного безпосереднього розміщення на ньому військовослужбовця, що виконує бойове завдання, в положенні лежачи, з метою його подальшого переміщення в цьому положенні, що, очевидно, практично адекватно його скритному переміщенню по-пластунськи; у прототипі відсутні механізми приведення його в хід гусеничного рушія простим чином у разі відмови як системи енергозабезпечення в цілому, так і інших принципово важливих його елементів: перетворювачів електроенергії, датчиків приводних тягових двигунів і ін. У основу конструктивних рішень пропонованого винаходу поставлено задачу усунення недоліків, властивих, на наш погляд, наземному військовому роботу, вибраному як прототип, а так само решті практично всіх відомих до теперішнього часу конструкцій військових роботів. Для вирішення цієї задачі передбачено не тільки її виконання на основі використання модульного принципу побудови технічних систем, який був застосований в прототипі, але і створення таких варіантів конструктивного виконання пропонованого військового наземного робота, на основі яких реалізується забезпечення надійного функціонування подібних роботів в складних умовах бойових дій розвідників, що проходять в екстремальній фізично-географічної обстановці. Практична реалізація усунення недоліків прототипу в пропонованій модульно-структурованій допоміжній наземній бойовій робототехнічній машині скритного супроводження розвідників досягнута таким чином. Як і в прототипі, пропонований військовий наземний робот конструктивно виконаний з окремих повністю завершених функціональних блоків-модулів, кожен з яких призначений для виконання тільки одної основної принципової функції. При цьому найважливіші для забезпечення життєдіяльності пропонованого робота функціональні блоки-модулі повинні мати вигляд механічно жорстких повністю ідентичних по зовнішніх габаритах коробчастих корпусів однієї і тієї ж простої конструкції, що забезпечують захист основних елементів, розміщених усередині вказаних коробчастих корпусів. Пропонована модульно-структурована допоміжна наземна бойова робототехнічна машина скритного супроводження розвідників повинна мати один або два силові блоки-модулі коробчастої конструкції, в яких жорстко закріплені електрохімічні, конденсаторні або комбіновані джерела електричної енергії, її перетворювачі для живлення 5 тягових електричних двигунів гусеничного рушія і решти споживачів електричної енергії, комплекс датчиків системи тягового електроприводу, зовнішньої обстановки і діагностики і бортовий комп'ютер, а так само бути забезпеченою комплектом виконавчих механізмів, необхідних для її нормального функціонування. До цих пристроїв, зокрема, належать різного роду маніпулятори, різноманітні системи озброєння, самоліквідації і тому подібне. При цьому гнучка вантажна платформа робота, яка шарнірно пов'язана з одним або двома силовими блоками-модулями, повинна бути виконана у вигляді набору розміщених подовжньо, шарнірно сполучених один з одним, плоских транспортних блоків-модулів невеликої висоти, кожен з яких несе щонайменше одну пару опорних коліс, що знаходяться в механічному контакті з суцільними гнучкими гусеницями гусеничного рушія, причому безпосередній, безпередаточний електромеханічний привід кожною з двох гусениць складається з пари тягових двигунів, встановлених в силовому блоці-модулі. Повністю очевидно, що гнучкість конструкції вантажної платформи, завдяки якій забезпечена її адаптація до рельєфу місцевості, по якій рухається пропонований військовий наземний робот скритного супроводження розвідників, досягнута на основі того, що вона виконана у вигляді елемента гусениці, що складається з шарнірно зв'язаних горизонтальних площадок-траків, забезпечених опорними колесами, в яких розміщені обидві замкнуті гнучкі гусениці приводного гусеничного рушія. Обмеження вертикальних габаритів плоских елементів-траків, з яких складається гнучка транспортна вантажна платформа пропонованого наземного робота, сприяє значному підвищенню його маскувальних можливостей, що утрудняє його виявлення супротивником і завдяки цьому забезпечує істотне зниження рівня вогняної поразки. Підвищення надійності пропонованої модульно-структурованої допоміжної наземної бойової робототехнічної машини скритного супроводження розвідників досягнуте шляхом її оздоблення двома силовими блок-модулями, шарнірно приєднаними, відповідно, до головного і хвостового плоским транспортним блокам-модулям, створюючи гнучку вантажну платформу пропонованої наземної бойової робототехнічної машини. Для того, щоб було забезпечено надійне функціонування пропонованої модульноструктурованої допоміжної наземної бойової робототехнічної машини скритного супроводження розвідників в аварійних умовах припинення електроживлення тягових електричних двигунів гусеничного рушія, запропоновано встановити в силових блоках-модулях приводні пристрої у вигляді важелів, за допомогою яких ротори приводних тягових двигунів, а, отже, і гусениці рушія можуть бути приведені в обертання при втраті електроживлення за допомогою механічного зусилля, що додається ззовні. Такі важелі можуть мати ручний або ножний привід і приводитися в обертання розвідником, розміщеним з цією метою на гнучкій вантажній платформі в положенні лежачи або сидячи. 95730 6 Подальше підвищення функціональних можливостей пропонованої модульно-структурованої допоміжної наземної бойової робототехнічної машини скритного супроводження розвідників досягнуте завдяки тому, що головний і хвостовий силові блоки-модулі робота забезпечені автономними парами гнучких гусениць. Як відомо, однією з новітніх технологічних розробок останнім часом є отримання гнучких гофрованих композитних або металевих труб круглого і прямокутного перерізу. На нашу думку, такі труби можуть бути з успіхом використані як основні елементи гусениць гусеничних рушіїв пропонованого в справжній заявці на видачу патенту на модульноструктуровану допоміжну наземну бойову робототехнічну машину скритного супроводження розвідників, підвищуючи коефіцієнт їх зчеплення з покриттям пересіченої місцевості. На кресленнях, що ілюструють конструктивну суть пропонованої модульно-структурованої допоміжної наземної бойової робототехнічної машини скритного супроводження розвідників, представлені: Фіг. 1. Силовий блок-модуль, що входить до складу модульно-структурованої допоміжної наземної бойової робототехнічної машини скритного супроводження розвідників, вигляд збоку, подовжній розріз; Фіг. 2. Блок-модуль гнучкої вантажної платформи з двома опорними колесами, вигляд збоку; Фіг. 3. Блок-модуль вантажної платформи з одним опорним колесом, вигляд збоку; Фіг. 4. Модульно-структурована допоміжна наземна бойова робототехнічна машина скритного супроводження розвідників з одним силовим блоком-модулем, загальний вигляд збоку; Фіг. 5. Модульно-структурована допоміжна наземна бойова робототехнічна машина скритного супроводження розвідників з одним силовим блоком-модулем, загальний вигляд збоку; з показом подовжнього розрізу силового блока-модуля; Фіг. 6. Модульно-структурована допоміжна наземна бойова робототехнічна машина скритного супроводження розвідників з двома силовими блоками-модулями, загальний вигляд збоку; Фіг. 7. Модульно-структурована допоміжна наземна бойова робототехнічна машина скритного супроводження розвідників з двома силовими блоками-модулями, загальний вигляд збоку з показом подовжнього розрізу силових блоків-модулів; Фіг. 8. Силовий блок-модуль модульноструктурованої допоміжної наземної бойової робототехнічної машини скритного супроводження розвідників з тяговими електродвигунами звичайної конструкції, поперечний розріз по А - А; Фіг. 9. Силовий блок-модуль модульноструктурованої допоміжної наземної бойової робототехнічної машини скритного супроводження розвідників з тяговими електродвигунами оберненої конструкції, поперечний розріз по А - А; Фіг. 10. Модульно-структурована допоміжна наземна бойова робототехнічна машина скритного супроводження розвідників з двома приводними силовими блоками-модулями, які приводять влас 7 них автономних гусеничних рушіїв, загальний вигляд збоку; Фіг. 11. Поздовжній розріз гофрованого елемента гнучкої гусениці; Фіг. 12. Поперечний розріз гофрованого елемента гнучкої гусениці, розріз по В - В. Фіг. 13. Модульно-структурована допоміжна наземна бойова робототехнічна машина скритного супроводження розвідників з головним силовим блоком-модулем при скритному переміщенні по пересіченій місцевості, загальний вигляд збоку. На фігурах 1, 2 і 3 схематично представлені основні функціональні блоки-модулі пропонованої модульно-структурованої допоміжної наземної бойової робототехнічної машини скритного супроводження розвідників. Представлений на фіг. 1 в подовжньому розрізі силовий функціональний блок-модуль 1 складається з коробчастого металевого або композитного корпусу 2, що забезпечений двома парами закріплених на корпусі 2 передніх і задніх опорних коліс 3 і 4, відповідно. До корпусу 2 жорстко, зваркою або високоміцним клеєм, прикріплений сполучний стрижень 5, який забезпечує шарнірне приєднання гнучкої вантажної платформи наземного бойового транспортного робота, що складається з блоків-модулів, показаних на фігурах 2 і 3, до силового функціонального блока-модуля 1. У верхній і нижній частинах корпусу 2, обернених у бік вантажної платформи робота, закріплено дві пари прохідних втулок, - верхня пара втулок 6 і нижня пара втулок 7, які, відповідно забезпечені отворами 8 і 9, через яких по ковзаючій посадці пропущені гнучкі гусениці гусеничного рушія, які на фіг.1 не показані. Конструкції блоків-модулів, показаних на фіг.2 і фіг. 3, з яких зібрана вантажна платформа пропонованого транспортного робота, мають горизонтальні вантажні площадки-траки 10 і 11, на осях 12 кронштейнів 13 яких знаходяться опорні колеса 14 гусениць гусеничного рушія. На фіг. 4 в загальному вигляді збоку представлена пропонована модульно-структурована допоміжна наземна бойова робототехнічна машина скритного супроводження розвідників, що має один головний, передній силовий блок-модуль. Горизонтальна гнучка вантажна платформа цього транспортного робота зібрана з комплекту, що включає, наприклад, п'ять транспортних блоківмодулів, - одного блока-модуля, конструкція якого показана на фіг. 3 і чотирьох блоків-модулів, типу, який представлений на фіг. 2. Гнучкість вантажної платформи, яка забезпечує адаптацію її форми до профілю пересіченої місцевості, для руху по якій, її основному, призначена пропонована допоміжна наземна бойова робототехнічна машина, конструктивно забезпечена тим, що горизонтальні вантажні площадки 10 і 11 блоків-модулів гнучкої вантажної платформи об'єднано в гнучкий елемент за допомогою шарнірних з'єднань 15. Для переміщення транспортного робота запропоновано використовувати гусеничний рушій на основі високоміцних суцільних гнучких гусениць 16, виготовлених, наприклад, на основі каучукових або пластмасових композитних сумішей. 95730 8 Як було вказано вище, всі траки-модулі, які створюють гнучку вантажну платформу, мають істотно обмежені вертикальні габарити, що значною мірою підвищує живучість пропонованої допоміжної наземної робототехнічної машини. На фіг. 5 показана конструкція пропонованого військового наземного робота, відповідна фіг.4, з подовжнім розрізом коробчастого силового блока 1. Завдяки цьому видно конструкцію електромеханічного приводу гнучких гусениць 16, кожна з яких приводиться в хід за допомогою двох приводних тягових електричних двигунів 17 обертального типу. На фіг. 6 і фіг. 7 показана конструкція пропонованої модульно-структурованої допоміжної наземної робототехнічної машини скритного супроводження розвідників, підвищення ступеня надійності якої забезпечене завдяки установці ідентичних силових блоків-модулів 1 як в головній, так і в хвостовій частинах гнучкої вантажної платформи. На фіг. 8 і фіг. 9 в розрізі по А-А показані різновиди конструктивних виконань силового блокамодуля 1 при застосуванні як тягових електричних двигунів обертального типу звичайної і оберненої конструкцій, відповідно. При використанні звичайних тягових електродвигунів 17, жорстко закріплених у відсіку 18 коробчастого корпусу 2 силові блоки-модулі 1, для приводу кожної з двох гнучких гусениць 16 гусеничного рушія пропонованої наземної бойової робототехнічної машини необхідно встановити у відсіку 19 додатковий передавальний механізм простішої конструкції у вигляді, наприклад, двох валів 20, між якими проходить гусениця 16. У відсіках 18 і 19 силового блока-модуля 1 додатково розміщені електрохімічні джерела 21 електроенергії, а так само її перетворювачі 22. За допомогою розміщених зовні рукояток 23 гусениці 16 гусеничного рушія можуть бути приведені в хід завдяки додатку зовнішньою механічного зусилля з боку розвідника, що знаходиться на гнучкій вантажній платформі пропонованої наземної бойової робототехнічної машини. Якщо замість тягових електричних двигунів звичайної конструкції застосовані, як це представлено на фіг.9, електродвигуни оберненої конструкції, то відпадає необхідність у використанні додаткового передавального механізму, що складається з двох валів 20. В цьому випадку корпуси 24 роторів приводних двигунів 25 безпосередньо механічно впливають на гнучких гусениць 16, приводячи їх в рух. Конструкція силового блока-модуля 1 значно спрощується. Конструкція зовнішнього приводною механізму, використовуваного при втраті електроживлення, містить зубчате колесо 26, що приводиться в хід ззовні розвідником, як і у попередньому випадку, за допомогою рукоятки 23. На фіг. 10 представлена конструкція пропонованої модульно-структурованої допоміжної наземної робототехнічної машини скритного супроводження розвідників, гусеничний рушій якого розподілений на два автономні елементи - передній елемент 27 і задній елемент 28. Тягові електричні двигуни обох елементів 27 і 28 гусеничного рушія пропонованої наземної бойової робототех 9 нічної машини скритного супроводу розвідників розміщені в двох корпусах 2 силових блоківмодулів 1. На фіг. 11 і фіг. 12 показана у вигляді подовжнього і поперечного розрізів, відповідно, гусениця 29 гусеничного рушія, яка виконана з гнучкої гофрованої металевої або композитної труби круглого або прямокутного поперечного перерізу. Такі гусениці, крім довговічності, забезпечують підвищення коефіцієнта зчеплення гусеничного рушія з ґрунтом. Пропонована модульно-структурована допоміжна наземна бойова робототехнічна машина скритного супроводження розвідників працює таким чином. На підготовчому етапі з набору силових функціональних блоків-модулів 1, що є в наявності, функціональних блоків-модулів 10 і 11 гнучкої вантажної платформи і замкнутих гнучких гусениць 16, 27 і 28 гусеничного рушія, що спираються на опорні колеса 14 площадок-траків, проводиться монтаж однієї або декількох пропонованих бойових робототехнічних машин в комплектації, яка у максимальному ступені забезпечує успішне виконання всього об'єму поставленого розвідувального бойового завдання. Після монтажу і перевірки працездатності модульноструктурована допоміжна наземна бойова робототехнічна машина (машини) скритного супроводження розвідників поступає в розпорядження розвідувального підрозділу, що отримав вказане вище бо 95730 10 йове завдання і доставляється до рубежу початку розвідувальної операції на спеціальному транспорті. У випадку, якщо доставка робототехнічної машини (машин) в заздалегідь зібраному вигляді опиняється неможливою, вона (вони) доставляється на рубіж початку розвідувальної операції у вигляді набору складених функціональних блоківмодулів. Очевидно, що в цьому випадку збірка пропонованої бойової робототехнічної машини скритного супроводження розвідників повинна бути проведена безпосередньо перед початком розвідувальної операції. Надалі пропонована бойова машина повинна бути використана для скритного переміщення розвідників, озброєння і вантажів як в дистанційно керованому режимі, так і управлятися розвідником, що безпосередньо знаходиться на її вантажній платформі. Для вогняної підтримки розвідувальної операції на корпусі 2 силових функціональних блоків-модулів повинен бути встановлений комплект озброєння, який на кресленнях, що ілюструють принципову суть винаходу, не показаний. На фіг. 13 представлений вид збоку пропонованої робототехнічної машини при її русі по пересіченій місцевості. Видно, що вантажна платформа машини добре адаптується до рельєфу місцевості завдяки тому, що вона виконана у вигляді сполучених шарнірно площадок-траків невеликої довжини і висоти. 11 95730 12 13 95730 14 15 Комп’ютерна верстка Л. Купенко 95730 Підписне 16 Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюModule-structural supplementary surface fighting robot-technical machine for secret following of scouts
Автори англійськоюPopovichenko Oleksandr Viktorovych, Tolstoi Oleksii Volodymyrovych, Klymenko Vadym Mykolaiovych, Belikov Viktor Tryfonovych, Vasyliev Valerii Valentynovych
Назва патенту російськоюМодульно-структурированная вспомогательная наземная боевая робототехническая машина скрытого сопровождения разведчиков
Автори російськоюПоповиченко Александр Викторович, Толстой Алексей Владимирович, Клименко Вадим Николаевич, Беликов Виктор Трифонович, Васильев Валерий Валентинович
МПК / Мітки
МПК: F41H 7/00
Мітки: робототехнічна, розвідників, допоміжна, модульно-структурована, супроводження, прихованого, машина, бойова, наземна
Код посилання
<a href="https://ua.patents.su/8-95730-modulno-strukturovana-dopomizhna-nazemna-bojjova-robototekhnichna-mashina-prikhovanogo-suprovodzhennya-rozvidnikiv.html" target="_blank" rel="follow" title="База патентів України">Модульно-структурована допоміжна наземна бойова робототехнічна машина прихованого супроводження розвідників</a>
Бойова броньована машина

Номер патенту: 7709
Опубліковано: 15.07.2005
Автор: Куперман Леонід Мойсейович
МПК: F41H 7/02
Мітки: бойова, машина, броньована
Формула / Реферат:
1. Бойова броньована машина, зокрема бойова машина вогневого супроводження та підтримки танків та їх протиповітряного захисту, що містить рухомий корпус, наприклад, з гусеничним рушієм і силовим відділенням, в якому розміщені двигун і трансмісія з обслуговуючими їх системами та обладнанням і який має один чи більше відсіків - багатокутових у плані рубок, причому рубки відокремлені в основному вертикальними стінками, покрівлею рубок та днищем...
Бойова машина

Номер патенту: 7669
Опубліковано: 15.07.2005
Автор: Писаренко Анатолій Євменович
Формула / Реферат:
Бойова машина, що містить корпус, який зварений із броньованих листів і має прорізи люків, з виконаними по периметру окантовками та захисними екранами, що закриваються кришками з розмірами, відповідними розмірам прорізів, яка відрізняється тим, що захисні екрани виконано спільно з листами корпусу у вигляді вертикальних ребер, під якими розташовані краї Г-подібного профілю окантовок.
Бойова машина
Номер патенту: 43494
Опубліковано: 17.12.2001
Автор: СИДОРЕНКО Володимир Якович
МПК: F41A 23/00, B62D 63/00
Формула / Реферат:
1. Бойова машина, що має в своєму складі броньовий корпус, поділений на дві частини, 2/3 якого - бойовий відділ, у верхній частині корпусу розміщена башта, а в задній частині розміщений двигун, та вогневий засіб, трансмісію, що зв'язана з ходовою частиною, яка відрізняється тим, що вогневий засіб розміщений в нижній частині корпусу, на дно якого встановлений піднімальний механізм, на верхній підвалині якого закріплене коло у вигляді...
Бойова машина

Номер патенту: 35823
Опубліковано: 16.04.2001
Автор: Чугуй Володимир Леонідович
МПК: F41H 7/02
Формула / Реферат:
Бойова машина, що має гусеничний або колісний рушій, броньований корпус з носовою і кормовою баштами, всередині її корпуса розташовані силова установка з необхідними для її роботи системами, робочі місця екіпажу з відповідними органами керування, контрольно-вимірювальними і візирно-спостережними приладами, боєкомплект, носова башта розташована вище покрівлі корпуса, в носовій башті розташована зброя з настильною траєкторією польоту...
Бойова машина
Номер патенту: 46629
Опубліковано: 15.05.2002
Автори: Василенко Олександр Васильович, Луханін Михайло Іванович, Грек Володимир Григорович, Жуковський Сергій Михайлович, Баранчук Олександр Іванович, Бутенко Сергій Григорович, Цвіров Валерій Михайлович, Комаров Володимир Олександрович, Чепурний Анатолій Данилович, Козлов Олександр Федорович, Зайківський Олександр Болеславович, Богомол Володимир Іванович, Старицький Лев Павлович, Лисиця Леонід Іванович, Медвідь Володимир Станіславович, Солодковський Валерій Станіславович
Формула / Реферат:
1. Бойова машина, що містить корпус з розташованими на ньому на платформі, що обертається, гарматним озброєнням, а також гусеничний рушій, при цьому корпус розділено поперечними перегородками на відділення, переднє з яких є моторно-трансмісійним з обладнаним місцем для механіка-водія та люком, у середньому відділенні встановлено механізм повороту платформи з розміщеною на останній гарматною установкою, а у кормовому відділенні виконано відсік...
Попередній патент: Спосіб доведення хімічного складу сталі в ковші
Наступний патент: Спосіб очищення води від заліза
Випадковий патент: Шумозахисний екран