Транспортер безперервної дії для транспортування важких сипучих матеріалів або штучних матеріалів

Формула / Реферат
1. Транспортер безперервної дії для транспортування важких сипучих матеріалів або штучних матеріалів, з нескінченним транспортувальним тяговим органом, який переміщається по замкнутому колу між ведучим роликом і відхиляючим роликом, з сполученим з ведучим роликом приводом від електродвигуна, який відрізняється тим, що привід включає в себе щонайменше один багатополюсний синхронний двигун (6) зі збудженням від постійних магнітів, частота обертання якого становить максимально 15-кратну величину робочої частоти обертання ведучого ролика (2) транспортувального тягового органу (1).
2. Транспортер безперервної дії за п. 1, який відрізняється тим, що синхронний двигун (6) здійснює безпосередній привід ведучого ролика (2), так що частота обертання двигуна відповідає робочій частоті обертання ведучого ролика (2).
3. Транспортер безперервної дії за п. 2, який відрізняється тим, що номінальна частота обертання синхронного двигуна (6) знаходиться в діапазоні від 5 об./хв. до 100 об./хв., краще від 20 об./хв. до 50 об./хв.
4. Транспортер безперервної дії за п. 2 або п. 3, який відрізняється тим, що синхронний двигун (6) видає крутний момент від 50 кН•м до 800 кН•м, краще від 100 кН•м до 500 кН•м.
5. Транспортер безперервної дії за одним з пп. 2-4, який відрізняється тим, що відбір потужності на виході синхронного двигуна (6) становить від 50 кВт до 2000 кВт, краще від 100 кВт до 1000 кВт.
6. Транспортер безперервної дії за п. 1, який відрізняється тим, що синхронний двигун (6) здійснює привід ведучого ролика (2) через одноступінчасту знижувальну передачу (15) з передавальним відношенням від 2 до 15, краще від 5 до 10.
7. Транспортер безперервної дії за п. 6, який відрізняється тим, що номінальна частота обертання синхронного двигуна знаходиться в діапазоні від 10 об./хв. до 700 об./хв., краще від 50 об./хв. до 300 об./хв.
8. Транспортер безперервної дії за п. 6 або п. 7, який відрізняється тим, що синхронний двигун видає крутний момент від 30 кН•м до 400 кН•м, краще від 50 кН•м до 250 кН•м.
9. Транспортер безперервної дії за одним з пп. 1-6, який відрізняється тим, що частота двигуна синхронного двигуна (6) становить від 20 до 150 Гц.
10. Транспортер безперервної дії за одним з пп. 1-7, який відрізняється тим, що число пар полюсів синхронного двигуна (6) становить від 6 до 50, краще від 8 до 15.
11. Транспортер безперервної дії за одним з пп. 1-8, який відрізняється тим, що синхронний двигун (6) виконаний з керуванням від електронного частотного перетворювача (14).
12. Транспортер безперервної дії за п. 11, який відрізняється тим, що синхронний двигун (6) виконаний із здійсненням контролю, регулювання та обмеження крутного моменту і частоти обертання залежно від процесу транспортування.
13. Транспортер безперервної дії за п. 12, який відрізняється тим, що за допомогою регулювання частоти обертання синхронного двигуна (6) регулюють швидкість транспортувального тягового органу і таким чином відбувається безперервність завантаження транспортувального тягового органу.
14. Транспортер безперервної дії за п. 12, який відрізняється тим, що фактичні технологічні навантаження реєструють через частотний перетворювач (14) і оформлюють документально.
Текст
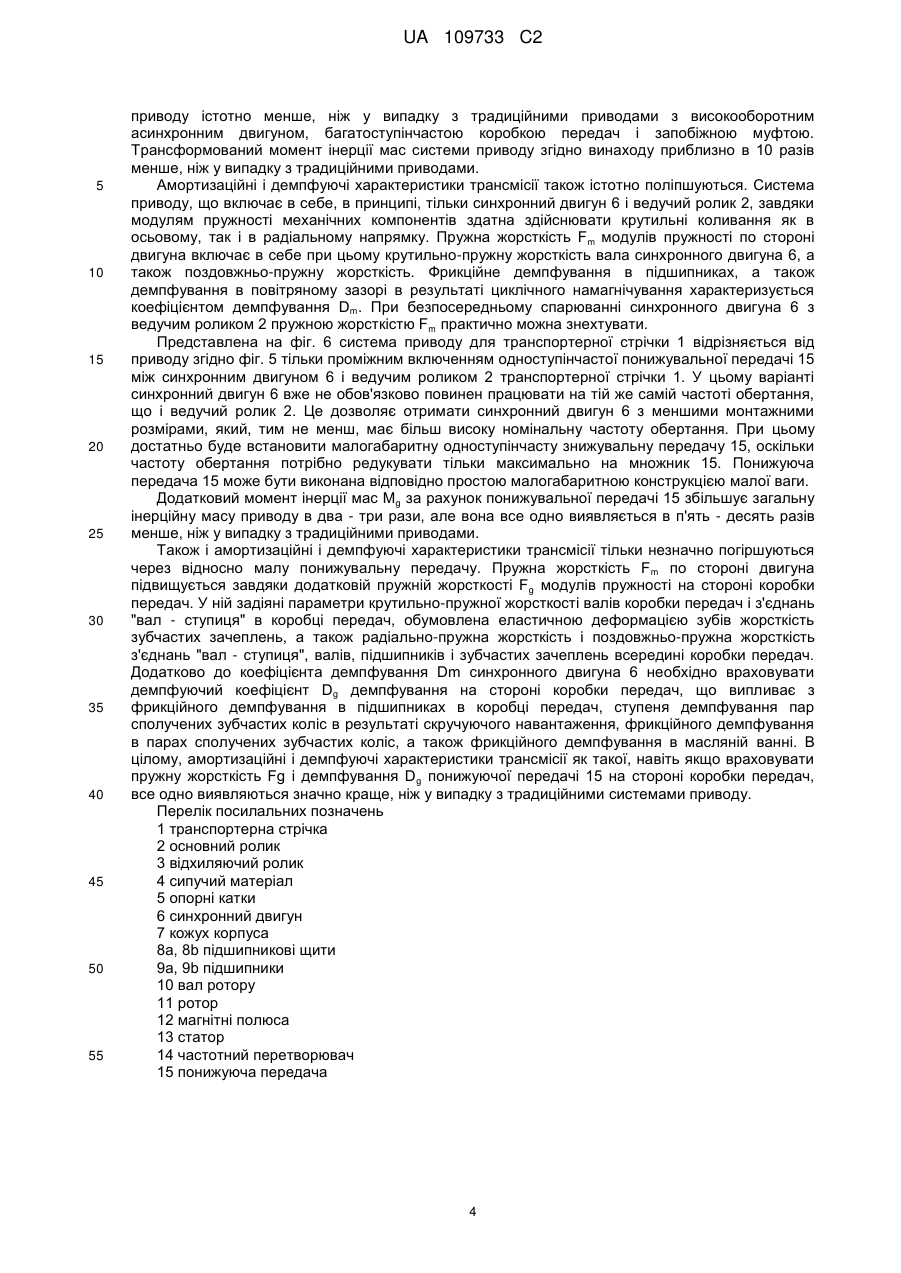
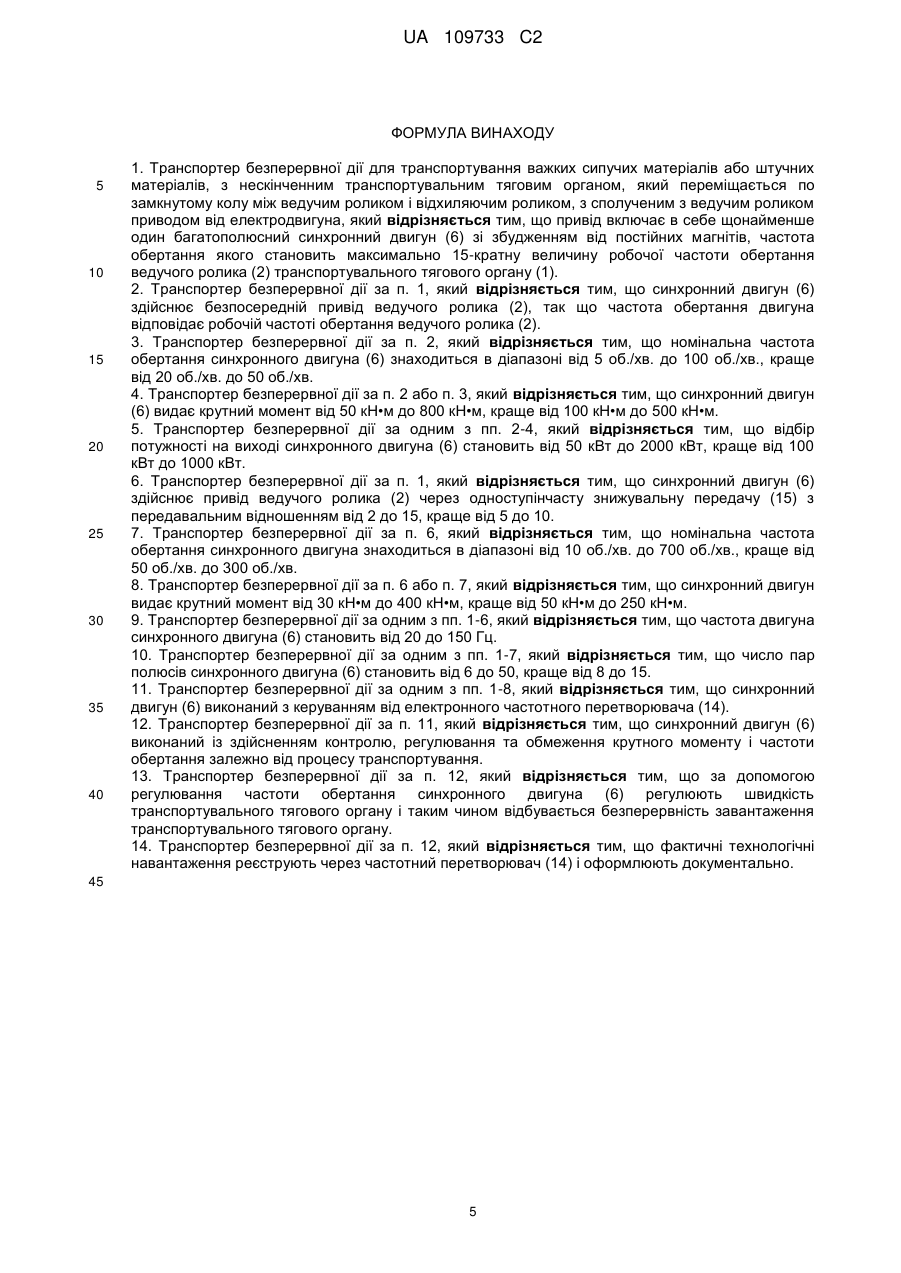
Реферат: Транспортер безперервної дії, такий як транспортерна стрічка для транспортування важких сипучих матеріалів або штучних матеріалів, включає в себе нескінченну транспортувальну стрічку (1), яка переміщається по замкнутому колу між основним роликом (2) і відхиляючим роликом (3). Основний ролик (2) приводиться в дію від багатополюсного синхронного двигуна (6) зі збудженням від постійних магнітів, який при порівняно малій номінальній частоті обертання видає дуже великий крутний момент. Синхронний двигун (6) може приводити в рух основний ролик (2) безпосередньо або, альтернативно, через одноступінчасту знижувальну передачу (15) з малим передавальним відношенням. Привід згідно з винаходом відрізняється до 10 разів меншим моментом інерції мас в порівнянні з традиційними приводними системами. За рахунок цього суттєво знижується небезпека пошкодження або навіть обриву транспортувальної стрічки (1), так що експлуатаційна безпека суттєво збільшується. UA 109733 C2 (12) UA 109733 C2 UA 109733 C2 5 10 15 20 25 30 35 40 45 50 55 60 Предметом винаходу є транспортери безперервної дії, які використовуються для транспортування великих партій сипучих матеріалів, таких як пісок, каміння або руда, а також для транспортування важких штучних матеріалів, наприклад, в гірничодобувній промисловості, при розробках родовищ відкритим або підземним способом або при навантаженні і розвантаженні кораблів, елеваторів і т. д. При цьому сипучі або штучні матеріали завантажують на завантажувальній ділянці на транспортувальний тяговий орган і транспортують до ділянки розвантаження або пересипання. Типовим прикладом транспортера безперервної дії є стрічковий транспортер для транспортування роздробленої руди. Стрічковий транспортер переміщається по опорних роликах, які встановлені на опори в протяжній несучій конструкції із сталевого профілю. Привідна станція включає в себе поряд з одним або декількома приводними валами щонайменше один електродвигун, який у більшості випадків виконаний як асинхронний двигун і працює на відносно великій частоті обертання, наприклад, 1500 об / хв. На відміну від цього ведучий ролик, що забезпечує поступальний рух стрічкового транспортера, обертається відносно повільно з частотою обертання від 5 до 100 об / хв. Тому між асинхронним двигуном і ведучим роликом повинна бути передбачена понижуюча передача, яка зазвичай виконується як багатоступінчастий циліндричний редуктор або планетарна передача і має передавальне відношення від 15:1 до 150:1. Також використовуються і редуктори з варійованим передавальним числом, за допомогою яких можна регулювати робочу частоту обертання ведучого ролика. Приводний двигун і, при необхідності, також і понижуюча передача можуть бути інтегровані в ведучий ролик, що представляє собою так званий електроролик (електродвигун-ролик). Транспортер безперервної дії може включати в себе також кілька приводних станцій, наприклад, дві головні станції і одну або кілька проміжних станцій, причому кожна приводна станція має один або два електродвигуна і відповідну кількість ведучих роликів. Сигналізацію про виникаючі при транспортуванні неполадки комутують у формі сигналів ударного навантаження через ведучий ролик на ведений вал редуктора, а звідти передають на приводний двигун. При значних неполадках, наприклад, в результаті скупчення сипучого матеріалу або заклинювання сторонніх предметів транспортувальний тяговий орган може несподівано зупинитися на короткий час. Однак ротор двигуна, вали і шестерні редуктора, а також зв'язаний з ним ведучий ролик продовжують рухатися внаслідок великої інерції мас системи приводу в цілому, у всякому разі, до тих пір, поки при перевищенні певних моментів сил не відбудеться автоматичне виключення або відключення двигуна. Це може привести до виникнення великих механічних напружень в редукторі, двигуні і транспортувальному тяговому органі, внаслідок чого настає пошкодження транспортувального тягового органу, наприклад його обрив. Для виключення подібних неприпустимо великих ударних навантажень, що супроводжуються можливими ушкодженнями транспортувального тягового органу, згідно відомим технічним рішенням між ведучим роликом і заниженою передачею часто встановлюють запобіжну муфту, яка автоматично розчіплюється при перевищенні заданих установок навантаження понад звичайні робочі навантаження, тобто від'єднує електричний привід від ведучого ролика. Особливо у випадку з великогабаритними і дуже великими, що працюють на підйом похилими транспортерами, використовуваними в гірничодобувній промисловості або при розробках відкритим способом, обрив транспортувального тягового органу сполучений з настільки великими витратами коштів і часу на проведення необхідного згодом ремонту, що таке пошкодження необхідно виключити при будь-яких обставинах. Відповідно високі і витрати на конструкторські розробки запобіжної муфти та системи контролю та управління, які забезпечують своєчасне спрацьовування аварійного відключення. Отже, виникає завдання, що полягає в тому, щоб сконструювати такий транспортер безперервної дії спеціально для важких сипучих матеріалів або штучних матеріалів, який був би менш чутливий до неполадок при транспортуванні і зменшував би небезпеку перевантаження і пошкодження транспортувального тягового органу в результаті подібних неполадок. В основу винаходу покладено усвідомлення того, що велика інерція мас традиційних систем приводу є причиною того, що в разі несправності транспортувальний тяговий орган швидко піддається механічному перевантаженню, і що тому мета розробок має полягати у зменшенні інерції мас системи приводу. Ця задача вирішена згідно відмітної частини першого пункту формули винаходу за рахунок того, що замість високооборотного електродвигуна з при фланцьованою багатоступінчастою пониженою передачею використовується багатополюсний синхронний двигун зі збудженням від постійних магнітів, частота обертання якого становить максимально 15-кратну величину робочої частоти обертання приводного вала, причому він забезпечує передачу крутного моменту 1 UA 109733 C2 5 10 15 20 25 30 35 40 45 50 55 щонайменше в 30 кН • м. За рахунок такого тихохідного електродвигуна з високим крутним моментом дорога багатоступенева понижуюча передача виявляється зайвою. Чинний на ведучий ролик момент інерції мас приводу в результаті зменшується до значення менше 20 % моменту інерції мас традиційного приводу. Кінетична енергія системи приводу виявляється значно меншою завдяки істотно меншій частоті обертання двигуна. У випадку з несправністю при транспортуванні сипучих або штучних матеріалів відносно легкий уніфікований вузол приводу реагує швидше. При виконанні гальмування з виносного блоку управління або навіть при короткочасному зупині транспортувального тягового органу представляється можливим зменшення або відключення приводного зусилля двигуна, перш ніж неприпустимо високі зусилля будуть передані через ведучий ролик на тяговий орган. У разі несправності, наприклад, при короткому замиканні в частотному перетворювачі або двигуні виникаючий збурюючий момент виявляється явно меншим, в результаті чого значно зменшується навантаження на механічні компоненти. Тим самим практично виключається деформування або навіть утворення тріщин в транспортувальному тяговому органі, і запобіжна муфта виявляється зайвою. Згідно подальшого вдосконаленого варіанту ідеї винаходу в її переважному виконанні, направленому на максимально можливе зменшення моменту інерції мас приводу, електродвигун може здійснювати безпосередній привід ведучого ролика транспортувального тягового органу. У випадку з таким вузлом безпосереднього ротаційного приводу з високим крутним моментом, званим також моментним електродвигуном, частота обертання двигуна відповідає частоті обертання приводного валу. Отже, понижуюча передача виявляється абсолютно зайвою, а момент інерції мас приводу зводиться до мінімуму. У випадку з подібним безпосереднім приводом момент інерції мас у порівнянні з традиційним приводом з високооборотним асинхронним двигуном і проміжною заниженою передачею можна зменшити на коефіцієнт 10. Коефіцієнт корисної дії системи приводу з моментним електродвигуном виявляється більше приблизно на 5 %. Це означає менше споживання енергії та меншу витрату потужності на знімання тепла. Охолодження ротора у випадку з моментними електродвигунами не вимагається. Що стосується використовуваних тут синхронних двигунів з великим числом пар полюсів, то мова, в принципі, йде про оптимізовані за високих крутних моментах сервомоторами великої потужності з порожнистим валом. Безпосередні ротаційні приводи або моментні електродвигуни до цього використовувалися, перш за все, на спеціалізованих верстатах, наприклад, на верстатах для лазерного різання, фрезерувальних та шліфувальних верстатах або черв'ячних пресах, але не на важкому підйомно-транспортному устаткуванні. Номінальна частота обертання синхронного двигуна складає, переважно, від 5 до 100 оборотів в хвилину, насамперед від 20 об / хв до 50 об / хв, коли двигун здійснює безпосередній привід приводного валу. Передавальний крутний момент становить, переважно, від 50 до 800 кілоньютон-метрів, насамперед від 100 кН•м до 500 кН•м. Подібні тихохідні синхронні двигуни з таким високим крутним моментом забезпечують тільки безпосередній привід транспортувального тягового органу. Потужність приводу, яка відбирається складає, переважно, від 50 до 2000 кіловат, насамперед від 100 кВт до 1000 кВт. Якщо синхронний двигун здійснює привід ведучого ролика через одноступінчасту знижувальну передачу, то переважна номінальна частота обертання більше на множник від 2 до 10 в залежності від передавального відношення і задає переданий двигуном крутний момент переважно менше майже наполовину. Також і в цьому випадку виходить значне зменшення моменту інерції мас щонайменше на множник 5 в порівнянні з традиційними приводами. Привід з синхронним двигуном і одноступінчастою заниженою передачею в порівнянні з традиційними приводами з декількома ступенями передач має однозначно менше рухомих компонентів. Це означає більш високу надійність системи. Моментний двигун з одноступінчастою коробкою передач призводить до створення істотно більш компактного приводу. Багатополюсні синхронні двигуни або ротаційні безпосередні приводи можна швидко і точно регулювати за допомогою частотних перетворювачів. Завдяки використанню частотних перетворювачів можна, в порівнянні з традиційними рішеннями без регулювання частоти обертання, забезпечити значні системні переваги: на основі регулювання частоти обертання і крутного моменту можна принципово оптимізувати процес транспортування. Сюди входять контроль і обмеження частоти обертання і крутного моменту синхронного двигуна, так само як і робочих характеристик процесу транспортування, а також супутнє документальне оформлення фактичних технологічних навантажень (контроль стану обладнання). Завдяки регулюванню швидкості транспортувального тягового органу можна забезпечити безперервність 2 UA 109733 C2 5 10 15 20 25 30 35 40 45 50 55 60 завантаження і, отже, рівномірний і ощадливий робочий режим працюючого на підйом похилого транспортера. Для транспортера безперервної дії відповідно до винаходу можна використовувати, переважно, двигуни, які залежно від числа своїх пар полюсів забезпечують необхідну частоту обертання двигуна при частоті двигуна від 20 до 150 Гц, переважно в діапазоні від 5 Гц до 100 Гц. Число пар полюсів становить, переважно, від 6 до 50, перш за все в межах 10. Нижче наведено докладний опис приклад конструктивного виконання згідно винаходу на основі доданих зображень. Показано на: Фіг. 1 схематичне уявлення в горизонтальному перетині стрічкового транспортера для транспортування важких сипучих матеріалів, Фіг. 2 схематичне представлення у вигляді зверху стрічкового транспортера згідно фіг. 1, Фіг. 3 електродвигун стрічкового транспортера згідно фіг. 2 в поздовжньому перетині, Фіг. 4 електродвигун згідно фіг. 3 в поперечному перерізі, Фіг. 5 блок-схема транспортера безперервної дії з безпосереднім ротаційним приводом, Фіг. 6 блок-схема транспортера безперервної дії з тихохідним синхронним двигуном і заниженою передачею. Як приклад транспортера безперервної дії на фіг. 1 схематично представлений стрічковий транспортер. Його нескінченна транспортерна стрічка 1 переміщається по замкнутому колу між ведучим роликом 2 і відхиляючим роликом 3. На ту частину транспортерної стрічки 1, яка задає власне верхню гілку конвеєра, завантажують важкий сипучий матеріал 4, наприклад, руду або відбиту породу і транспортують, по суті, в горизонтальній площині, як показано на ілюстрації зліва направо. Під транспортерною стрічкою 1 розташовуються опорні катки 5, що сприймають вагу транспортерної стрічки 1 і сипучого матеріалу 4. Привід стрічкового транспортера здійснюється за допомогою тихохідного, багатополюсного синхронного двигуна 6 з високим крутним моментом. Як видно на фіг. 2, синхронний двигун 6 здійснює привід ведучого ролика 2 стрічкового транспортера безпосередньо, тобто без проміжної механічної коробки передач. Робоча частота обертання ведучого ролика 2 становить приблизно 40 обертів на хвилину, так що і синхронний двигун 6 також має номінальну частоту обертання в 40 об / хв. Синхронний двигун 6 забезпечує при цьому передачу крутного моменту в межах 300 кН•м. При збільшенні споживаної потужності ведучий ролик 2 можна агрегатувати другим синхронним двигуном такого ж типу. Якщо за умовами займаної площі є обмеження за монтажною довжиною синхронного двигуна 6, можна також передбачити одноступінчасту знижувальну передачу між ведучим роликом 2 і синхронним двигуном 6, яка знижує частоту обертання синхронного двигуна 6, наприклад, на множник 5. Згідно показаним на фіг. 3 і фіг. 4 розрізах довжина синхронного двигуна 6 приблизно в два рази більше ширини. Виконаний за модульним принципом виконання сегментований синхронний двигун 6 має такий, що простирається між двома торцевими підшипниковими щитами 8a і 8b кожух 7 корпусу. На підшипникових щитах 8a, 8b знаходяться підшипники 9a, 9b для вала 10 ротора, на який насаджують ротор 11. По своїй периферії ротор 11 несе велике число магнітних полюсів 12. З вибіркою вузького розділяючого повітряного зазору по ротору 11 в кожух 7 корпусу садять статор 13. Таким чином, мова тут йде про внутрішній ротор. Виступаючий з однієї (правої) сторони з підшипникового щита 8b вал 10 ротора пов'язаний з ведучим роликом 2 стрічкового транспортера (див. фіг. 2). Блок-схема на фіг. 5 наочно демонструє переваги, пов'язані з безпосереднім приводом транспортерної стрічки 1 від багатополюсного синхронного двигуна зі збудженням від постійних магнітів з високим моментом. До 3-фазної мережі змінного струму підключений електронний частотний перетворювач 14, що генерує варійовану по амплітуді і частоті змінну напругу, яка подається на статор синхронного двигуна 6. Обертове змінне поле призводить ротор в рух. За допомогою управління частотним перетворювачем 14 забезпечується можливість варіювання частоти обертання синхронного двигуна 6 в діапазоні від нуля і до номінальної частоти обертання, так що представляється можливим запуск стрічкового транспортера зі стану зупину на високому крутному моменті без необхідності проміжної установки муфти між ведучим роликом 2 і синхронним двигуном 6. Відповідно малий і сукупний момент інерції мас приводу, що складається, по суті, з моменту інерції мас Mm синхронного двигуна 6, моменту інерції мас Mt транспортерної стрічки 1, включаючи ведучий ролик 2, і моменту інерції мас Mu відхиляючого ролика 3. Оскільки синхронний двигун 6 безпосередньо приводить в рух основний ролик 2 і тому працює на відносно малій частоті обертання, то момент інерції мас M m комплектної системи 3 UA 109733 C2 5 10 15 20 25 30 35 40 45 50 55 приводу істотно менше, ніж у випадку з традиційними приводами з високооборотним асинхронним двигуном, багатоступінчастою коробкою передач і запобіжною муфтою. Трансформований момент інерції мас системи приводу згідно винаходу приблизно в 10 разів менше, ніж у випадку з традиційними приводами. Амортизаційні і демпфуючі характеристики трансмісії також істотно поліпшуються. Система приводу, що включає в себе, в принципі, тільки синхронний двигун 6 і ведучий ролик 2, завдяки модулям пружності механічних компонентів здатна здійснювати крутильні коливання як в осьовому, так і в радіальному напрямку. Пружна жорсткість F m модулів пружності по стороні двигуна включає в себе при цьому крутильно-пружну жорсткість вала синхронного двигуна 6, а також поздовжньо-пружну жорсткість. Фрикційне демпфування в підшипниках, а також демпфування в повітряному зазорі в результаті циклічного намагнічування характеризується коефіцієнтом демпфування Dm. При безпосередньому спарюванні синхронного двигуна 6 з ведучим роликом 2 пружною жорсткістю Fm практично можна знехтувати. Представлена на фіг. 6 система приводу для транспортерної стрічки 1 відрізняється від приводу згідно фіг. 5 тільки проміжним включенням одноступінчастої понижувальної передачі 15 між синхронним двигуном 6 і ведучим роликом 2 транспортерної стрічки 1. У цьому варіанті синхронний двигун 6 вже не обов'язково повинен працювати на тій же самій частоті обертання, що і ведучий ролик 2. Це дозволяє отримати синхронний двигун 6 з меншими монтажними розмірами, який, тим не менш, має більш високу номінальну частоту обертання. При цьому достатньо буде встановити малогабаритну одноступінчасту знижувальну передачу 15, оскільки частоту обертання потрібно редукувати тільки максимально на множник 15. Понижуюча передача 15 може бути виконана відповідно простою малогабаритною конструкцією малої ваги. Додатковий момент інерції мас Mg за рахунок понижувальної передачі 15 збільшує загальну інерційну масу приводу в два - три рази, але вона все одно виявляється в п'ять - десять разів менше, ніж у випадку з традиційними приводами. Також і амортизаційні і демпфуючі характеристики трансмісії тільки незначно погіршуються через відносно малу понижувальну передачу. Пружна жорсткість F m по стороні двигуна підвищується завдяки додатковій пружній жорсткості F g модулів пружності на стороні коробки передач. У ній задіяні параметри крутильно-пружної жорсткості валів коробки передач і з'єднань "вал - ступиця" в коробці передач, обумовлена еластичною деформацією зубів жорсткість зубчастих зачеплень, а також радіально-пружна жорсткість і поздовжньо-пружна жорсткість з'єднань "вал - ступиця", валів, підшипників і зубчастих зачеплень всередині коробки передач. Додатково до коефіцієнта демпфування Dm синхронного двигуна 6 необхідно враховувати демпфуючий коефіцієнт Dg демпфування на стороні коробки передач, що випливає з фрикційного демпфування в підшипниках в коробці передач, ступеня демпфування пар сполучених зубчастих коліс в результаті скручуючого навантаження, фрикційного демпфування в парах сполучених зубчастих коліс, а також фрикційного демпфування в масляній ванні. В цілому, амортизаційні і демпфуючі характеристики трансмісії як такої, навіть якщо враховувати пружну жорсткість Fg і демпфування D g понижуючої передачі 15 на стороні коробки передач, все одно виявляються значно краще, ніж у випадку з традиційними системами приводу. Перелік посилальних позначень 1 транспортерна стрічка 2 основний ролик 3 відхиляючий ролик 4 сипучий матеріал 5 опорні катки 6 синхронний двигун 7 кожух корпуса 8a, 8b підшипникові щити 9a, 9b підшипники 10 вал ротору 11 ротор 12 магнітні полюса 13 статор 14 частотний перетворювач 15 понижуюча передача 4 UA 109733 C2 ФОРМУЛА ВИНАХОДУ 5 10 15 20 25 30 35 40 1. Транспортер безперервної дії для транспортування важких сипучих матеріалів або штучних матеріалів, з нескінченним транспортувальним тяговим органом, який переміщається по замкнутому колу між ведучим роликом і відхиляючим роликом, з сполученим з ведучим роликом приводом від електродвигуна, який відрізняється тим, що привід включає в себе щонайменше один багатополюсний синхронний двигун (6) зі збудженням від постійних магнітів, частота обертання якого становить максимально 15-кратну величину робочої частоти обертання ведучого ролика (2) транспортувального тягового органу (1). 2. Транспортер безперервної дії за п. 1, який відрізняється тим, що синхронний двигун (6) здійснює безпосередній привід ведучого ролика (2), так що частота обертання двигуна відповідає робочій частоті обертання ведучого ролика (2). 3. Транспортер безперервної дії за п. 2, який відрізняється тим, що номінальна частота обертання синхронного двигуна (6) знаходиться в діапазоні від 5 об./хв. до 100 об./хв., краще від 20 об./хв. до 50 об./хв. 4. Транспортер безперервної дії за п. 2 або п. 3, який відрізняється тим, що синхронний двигун (6) видає крутний момент від 50 кН•м до 800 кН•м, краще від 100 кН•м до 500 кН•м. 5. Транспортер безперервної дії за одним з пп. 2-4, який відрізняється тим, що відбір потужності на виході синхронного двигуна (6) становить від 50 кВт до 2000 кВт, краще від 100 кВт до 1000 кВт. 6. Транспортер безперервної дії за п. 1, який відрізняється тим, що синхронний двигун (6) здійснює привід ведучого ролика (2) через одноступінчасту знижувальну передачу (15) з передавальним відношенням від 2 до 15, краще від 5 до 10. 7. Транспортер безперервної дії за п. 6, який відрізняється тим, що номінальна частота обертання синхронного двигуна знаходиться в діапазоні від 10 об./хв. до 700 об./хв., краще від 50 об./хв. до 300 об./хв. 8. Транспортер безперервної дії за п. 6 або п. 7, який відрізняється тим, що синхронний двигун видає крутний момент від 30 кН•м до 400 кН•м, краще від 50 кН•м до 250 кН•м. 9. Транспортер безперервної дії за одним з пп. 1-6, який відрізняється тим, що частота двигуна синхронного двигуна (6) становить від 20 до 150 Гц. 10. Транспортер безперервної дії за одним з пп. 1-7, який відрізняється тим, що число пар полюсів синхронного двигуна (6) становить від 6 до 50, краще від 8 до 15. 11. Транспортер безперервної дії за одним з пп. 1-8, який відрізняється тим, що синхронний двигун (6) виконаний з керуванням від електронного частотного перетворювача (14). 12. Транспортер безперервної дії за п. 11, який відрізняється тим, що синхронний двигун (6) виконаний із здійсненням контролю, регулювання та обмеження крутного моменту і частоти обертання залежно від процесу транспортування. 13. Транспортер безперервної дії за п. 12, який відрізняється тим, що за допомогою регулювання частоти обертання синхронного двигуна (6) регулюють швидкість транспортувального тягового органу і таким чином відбувається безперервність завантаження транспортувального тягового органу. 14. Транспортер безперервної дії за п. 12, який відрізняється тим, що фактичні технологічні навантаження реєструють через частотний перетворювач (14) і оформлюють документально. 45 5 UA 109733 C2 6 UA 109733 C2 7 UA 109733 C2 Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 8
ДивитисяДодаткова інформація
Назва патенту англійськоюContinuous conveyor for transporting yeavy bulk material or articles
Автори англійськоюLachenmaier, Sepp
Автори російськоюЛахенмайер Зэпп
МПК / Мітки
МПК: H02K 7/10, B65G 23/00
Мітки: транспортування, штучних, дії, сипучих, безперервної, транспортер, матеріалів, важких
Код посилання
<a href="https://ua.patents.su/10-109733-transporter-bezperervno-di-dlya-transportuvannya-vazhkikh-sipuchikh-materialiv-abo-shtuchnikh-materialiv.html" target="_blank" rel="follow" title="База патентів України">Транспортер безперервної дії для транспортування важких сипучих матеріалів або штучних матеріалів</a>
Спосіб відпалу карбонатних сипучих матеріалів у вертикальній відпалювальній печі безперервної дії
Номер патенту: 55615
Опубліковано: 27.12.2010
Автори: Іванець Валерій Григорович, Корякін Володимир Михайлович, Яцьків Василь Іванович
МПК: F27B 1/00, F23C 10/00, C04B 2/00
Мітки: дії, матеріалів, безперервної, карбонатних, печі, відпалювальній, відпалу, вертикальний, спосіб, сипучих
Формула / Реферат:
1. Спосіб відпалу карбонатних сипучих матеріалів у вертикальній відпалювальній печі безперервної дії, що включає відділення від вихідної сировини дрібної фракції, завантаження очищеного від дрібної фракції матеріалу у відпалювальну піч, підігрів завантаженого матеріалу, зневоднення підігрітого матеріалу, нагрівання зневодненого матеріалу до початку його декарбонізації, декарбонізацію нагрітого матеріалу в одну стадію при 950-1200 °С,...
Вертикальний гвинтовий транспортер штучних вантажів
Номер патенту: 66432
Опубліковано: 10.01.2012
Автор: Гевко Іван Богданович
МПК: B65G 33/16
Мітки: вантажів, транспортер, гвинтовий, штучних, вертикальний
Формула / Реферат:
Вертикальний гвинтовий транспортер штучних вантажів, який виконано у вигляді корпусу, гвинтового механізму подачі та механізмів завантаження, розвантаження і приводу, який відрізняється тим, що гвинтовий механізм подачі виконано у вигляді двох гвинтових спіралей, встановлених одна в одній співвісно та виконаних з протилежно направленими витками з шириною, меншою за меншу сторону чи діаметр штучного вантажу, а у внутрішній спіралі встановлено...
Установка відпалу карбонатних сипучих матеріалів у вертикальній відпалювальній печі безперервної дії
Номер патенту: 55614
Опубліковано: 27.12.2010
Автори: Корякін Володимир Михайлович, Яцьків Василь Іванович, Іванець Валерій Григорович
МПК: F23C 10/00, C04B 2/00, F27B 1/00
Мітки: сипучих, відпалювальній, установка, відпалу, дії, вертикальний, печі, карбонатних, матеріалів, безперервної
Формула / Реферат:
1. Установка відпалу карбонатних сипучих матеріалів у вертикальній відпалювальній печі безперервної дії, що містить піч для відпалу вапна, оснащену вузлом завантаження вихідного матеріалу, вузлом вивантаження відпаленого матеріалу, системою газоочищення охолоджених топкових газів, системою подачі повітря й системою спалювання палива, яка відрізняється тим, що піч для відпалу вапна виконана вертикальною й прямою і змонтована з зрізаних...
Гвинтовий транспортер для дозованого транспортування сипких матеріалів
Номер патенту: 27245
Опубліковано: 15.08.2000
Автори: Бьом Христиан, КЕППЛІНГЕР Леопольд Вернер, ВАЛЛНЄР Фелікс
МПК: B65G 33/00, B65G 33/14
Мітки: гвинтовий, транспортер, сипких, матеріалів, дозованого, транспортування
Формула / Реферат:
1. Винтовой транспортер для регулируемой подачи сыпучих материалов, имеющий корпус, в котором выполнен ограниченный входным и выходным отверстиями транспортный канал, и установленный в транспортном канале простирающийся, по меньшей мере, от входного к выходному отверстию транспортный шнек, винт которого образован отдельными лопастями, отличающийся тем, что транспортный шнек на концевом участке вблизи выходного отверстия снабжен...
Посудина для зберігання рідини, сипучих матеріалів та штучних виробів
Номер патенту: 2101
Опубліковано: 15.10.2003
Автор: Онищенко Володимир Якович
Мітки: виробів, матеріалів, штучних, сипучих, рідини, посудина, зберігання
Формула / Реферат:
1. Посудина для зберігання рідини, сипучих матеріалів та штучних виробів, яка являє собою дерев'яну діжку, виконану у формі зрізаного конуса, що має дно, стінки, знімну кришку, причому стінки діжки виконані з набору щільно зібраних трапецієподібних клепок і мають щонайменше два зовнішні елементи для кріплення, яка відрізняється тим, що кожна клепка з одного боку по всій довжині має виступ, а з іншого - паз, який відповідає розміру виступу для...
Попередній патент: Спосіб гідровисіву пророщеного насіння
Наступний патент: Спосіб оцінювання функціонального стану серцево-судинної системи людини
Випадковий патент: Спосіб отримання бурякової стружки