Спосіб реєстрації порушень правил дорожнього руху
Номер патенту: 111239
Опубліковано: 11.04.2016
Автори: Бухтіяров Юрій Вікторович, Балабанова Ольга Ігорівна

Формула / Реферат
1. Спосіб реєстрації порушень правил дорожнього руху, при якому за допомогою датчиків вимірювань фізичних величин, які включають принаймні засоби відеофіксації, отримують зображення заданої ділянки дороги з рухомими транспортними засобами, передають дані в електронно-обчислювальний пристрій по наявних каналах зв'язку, проводять обробку даних про рух транспортних засобів та дорожню обстановку автоматичними програмними засобами, порівнюють отримані дані про рух транспортних засобів з допустимими по правилах дорожнього руху на даній ділянці дороги, проводять автоматичну кваліфікацію і фіксацію порушень правил дорожнього руху і позаштатних ситуацій з ідентифікацією конкретних порушників правил дорожнього руху, який відрізняється тим, що кожен датчик вимірювань фізичних величин додатково обладнують засобом формування точного часу, що складається з приймача сигналів точного часу і модуля генерації постійної частоти, при цьому попередньо здійснюють формування моделі ділянки дороги, на якій буде здійснюватися реєстрація порушень правил дорожнього руху, ґрунтуючись на сформованій моделі ділянки дороги формують пакет параметрів інсталяції і налаштувань згаданих датчиків вимірювань фізичних величин та їх взаємозв'язків один з одним, відповідно до якого проводять інсталяцію і налаштування згаданих датчиків, а обробку даних про рух транспортних засобів і дорожню обстановку здійснюють шляхом перетворення даних, отриманих від датчиків вимірювань фізичних величин в координати сформованої моделі ділянки дороги, при цьому автоматичну кваліфікацію і фіксацію порушень правил дорожнього руху та нештатних ситуацій проводять, ґрунтуючись на теорії графів.
2. Спосіб за п. 1, який відрізняється тим, що при формуванні моделі ділянки дороги, на якій буде здійснюватися реєстрація порушень правил дорожнього руху, створюють модель ділянки дороги, яка відповідає тій ділянці, на якій буде здійснюватися реєстрація порушень правил дорожнього руху, наносять всю відповідну дорожню розмітку, вказують дозволені й заборонені напрямки руху і перестроювання, проводять перевірку моделі, яку формують на наявність протиріч, задають світлофорне регулювання, на сформованій моделі визначають зони - неподільні ділянки дороги з нанесеним на них певним видом дорожньої розмітки.
3. Спосіб за п. 1, який відрізняється тим, що формування пакета параметрів інсталяції і налаштувань згаданих датчиків вимірювань фізичних величин та їх взаємозв'язків один з одним проводять на основі даних, отриманих при формуванні моделі ділянки дороги, на якій буде здійснюватися реєстрація порушень правил дорожнього руху у відповідності з даними, отриманими від самих датчиків вимірювань фізичних величин.
4. Спосіб за п. 2, який відрізняється тим, що на отриманому за допомогою датчиків вимірювань фізичних величин, які включають принаймні засоби відеофіксації, зображенні заданої ділянки дороги, на якій здійснюють реєстрацію порушень правил дорожнього руху, також визначають зони - неподільні ділянки дороги з нанесеним на них певним видом дорожньої розмітки.
5. Спосіб за п. 4, який відрізняється тим, що для зон, визначених на отриманому за допомогою датчиків вимірювань фізичних величин, які включають принаймні засоби відеофіксації, на зображенні заданої ділянки дороги, на якій здійснюється реєстрація порушень правил дорожнього руху, проводять прив'язку до відповідних зон на сформованій моделі ділянки дороги.
6. Спосіб за п. 1, який відрізняється тим, що дані, отримані від датчиків вимірювань фізичних величин, щонайменше від засобу відеофіксації і засобу формування точного часу, зіставляють.
7. Спосіб за п. 1, який відрізняється тим, що обробку даних про рух транспортних засобів і дорожню обстановку автоматичними програмними засобами проводять шляхом перетворення даних, отриманих від датчиків вимірювань фізичних величин в координати треку переміщення транспортного засобу на сформованій моделі ділянки дороги з урахуванням заздалегідь визначених зон на моделі ділянки дороги.
8. Спосіб за п. 7, який відрізняється тим, що як треки, використовують набір послідовних точок траєкторії руху транспортного засобу, в якому кожній точці відповідає унікальний момент часу.
9. Спосіб за п. 1, який відрізняється тим, що автоматичну кваліфікацію і фіксацію порушень правил дорожнього руху та нештатних ситуацій проводять використовуючи граф виявлення порушень правил дорожнього руху, причому вершинами графа є зони, визначені на сформованій моделі, а ребрами - дозволені й заборонені переходи між зонами.
10. Спосіб за п. 7 або п. 9, який відрізняється тим, що ідентифікацію конкретних порушників правил дорожнього руху проводять по розпізнаному державному реєстраційному номерному знаку транспортного засобу.
11. Спосіб за п. 1, який відрізняється тим, що після автоматичної кваліфікації та фіксації порушень правил дорожнього руху формують пакети доказової бази, що складаються з відеокадрів з відображеним на них транспортним засобом з розпізнаним державним реєстраційним номерним знаком з присвоєними їм мітками точного часу, відеокадрів, які підтверджують наявність факту порушення правил дорожнього руху даним транспортним засобом з присвоєними їм мітками точного часу, документа про склад порушення правил дорожнього руху і відправляють сформовані пакети доказової бази на зовнішні приймачі інформації.
12. Спосіб за п. 11, який відрізняється тим, що сформовані пакети доказової бази передають до архіву доказової бази для забезпечення можливості затребування через певний час при необхідності.
13. Спосіб за п. 1, який відрізняється тим, що кожен датчик вимірювань фізичних величин містить засіб радіолокації та/або засіб зчитування сигналів керування світлофором.
Текст
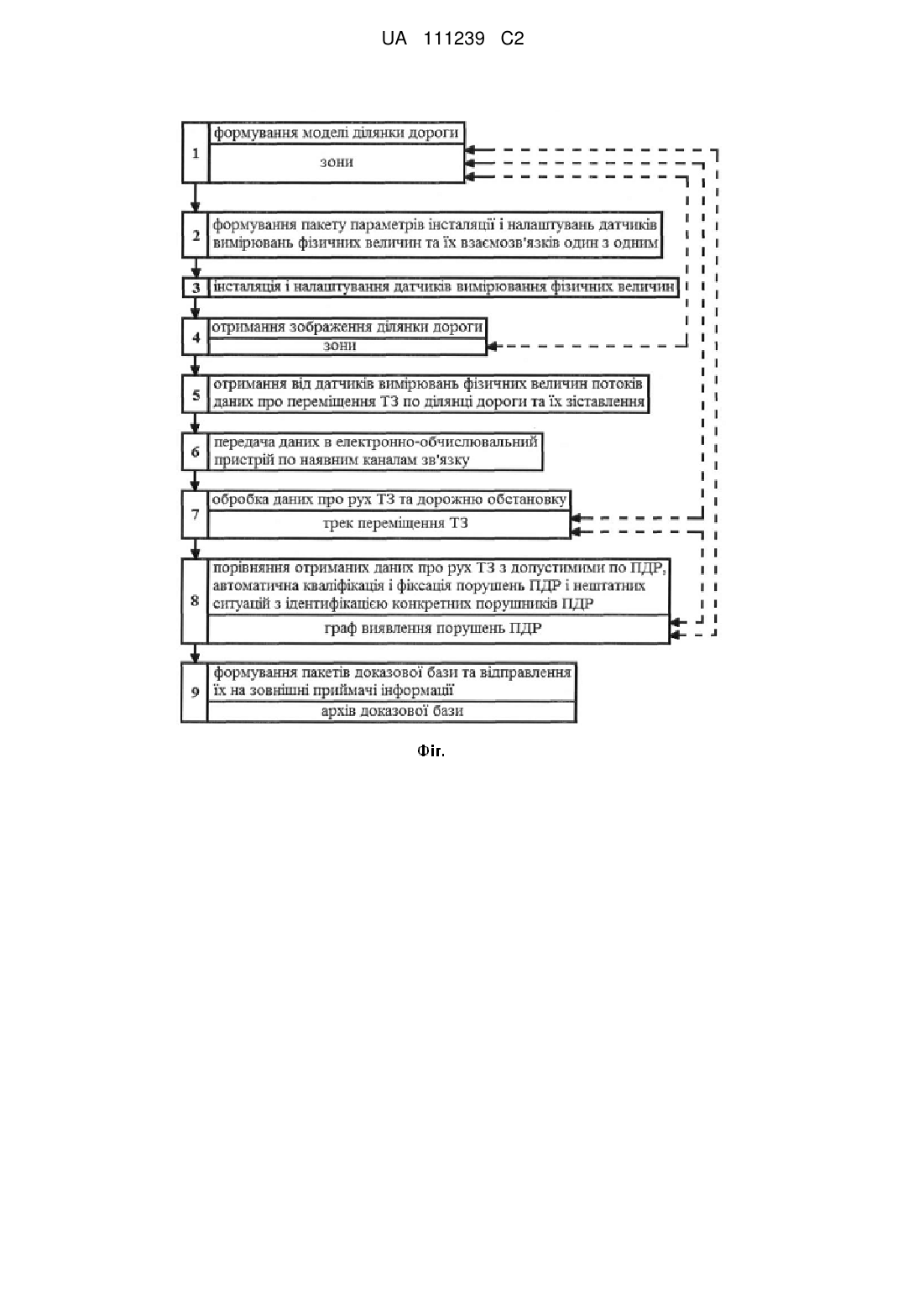
Реферат: Спосіб реєстрації порушень правил дорожнього руху (ПДР), при якому за допомогою датчиків вимірювань фізичних величин, що включають принаймні засоби відеофіксації та засіб формування точного часу, отримують зображення заданої ділянки дороги з рухомим транспортним засобом (ТЗ), передають дані в електронно-обчислювальний пристрій за наявними каналами зв'язку, здійснюють обробку даних про рух ТЗ та дорожню обстановку автоматичними програмними засобами, порівнюють отримані дані про рух ТЗ з допустимими за ПДР на даній ділянці дороги, проводять автоматичну кваліфікацію і фіксацію порушень ПДР і позаштатних ситуацій з ідентифікацією конкретних порушників ПДР. При цьому попередньо здійснюють формування моделі ділянки дороги, на якій буде здійснюватися реєстрація порушень ПДР, ґрунтуючись на сформованій моделі ділянки дороги формують пакет параметрів інсталяції і налаштувань згаданих датчиків вимірювань фізичних величин і їх взаємозв'язків один з одним, та проводять відповідні налаштування згаданих датчиків, а обробку даних здійснюють шляхом перетворення даних, отриманих від датчиків вимірювань фізичних величин в координати сформованої моделі ділянки дороги, при цьому автоматичну кваліфікацію і фіксацію порушень ПДР і позаштатних ситуацій проводять ґрунтуючись на теорії графів. Спосіб забезпечує підвищення доказової здатності формованої доказової бази щодо порушень ПДР конкретним ТЗ та об'єктивності отримання інформації про дорожню обстановку. UA 111239 C2 (12) UA 111239 C2 UA 111239 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до галузі контролю руху дорожнього транспорту і може бути використаний для реєстрації порушень правил дорожнього руху (ПДР) конкретними транспортними засобами (ТЗ), а також для моніторингу дорожньої обстановки та збору статистичних даних. Відомий спосіб реєстрації порушень ПДР (патент RU 2480841 G08G 1/01 (2006.01), опубл. 27.04.2013 Бюл. № 12), згідно з яким за допомогою засобів відеофіксації одержують зображення заданої ділянки дороги з рухомими ТЗ, передають дані в електронно-обчислювальний пристрій за наявними каналами зв'язку, проводять обробку даних про рух ТЗ та дорожню обстановку автоматичними програмними засобами, порівнюють отримані дані про рух ТЗ з допустимими по ПДР на даній ділянці дороги, проводять автоматичну кваліфікацію і фіксацію порушень ПДР і позаштатних ситуацій з ідентифікацією конкретних порушників ПДР, при цьому як засоби відеофіксації використовують дві або більше відеокамери, які розташовують на заданій відстані одну від одної таким чином, щоб вони знімали одну і ту ж ділянку дороги з ТЗ, при цьому обробку даних про рух ТЗ проводять із застосуванням тривимірної реконструкції заданої ділянки дороги з ТЗ по зображеннях зазначених відеокамер і визначенням тривимірного положення ТЗ відносно дороги, по якій переміщається вказаний ТЗ, причому для визначення тривимірної реконструкції заданої ділянки дороги з ТЗ у абсолютному масштабі відстаней використовують набір двох або більше контрольних точок заданої ділянки дороги або ТЗ, абсолютні відстані між якими заздалегідь відомі. Недоліком даного способу є те, що для його реалізації необхідна побудова тривимірної реконструкції заданої ділянки дороги з ТЗ, а для забезпечення необхідних даних потрібно мінімум дві відеокамери, які були б спрямовані на одну ділянку дороги. Необхідність використання двох відеокамер економічно невигідна, створення і обробка тривимірної реконструкції вимагає додаткових комп'ютерних ресурсів, що в свою чергу також підвищує вартість використання описаного способу. При необхідності одночасно працювати з багатьма об'єктами (що відбувається при щільному потоці ТЗ) вимоги до комп'ютерних ресурсів зростають, а при недостатності цих ресурсів відбувається збій комп'ютерної системи, що вкрай негативно позначається на обробці інформації та прийнятті рішень по наявності порушень ПДР. Крім того, цей спосіб вимагає визначення контрольних точок заданої ділянки дороги або ТЗ, абсолютні відстані між якими заздалегідь відомі. Орієнтування на контрольні точки, що належать державному реєстраційному номерному знаку на наш погляд більш практичне, хоча і воно не є універсальним, оскільки державні реєстраційні номерні знаки різних держав виконані за різними стандартами і цей факт не дозволяє стверджувати, що відстані між крайніми лівими і крайніми правими точками державних реєстраційних номерних знаків всіх ТЗ рівні між собою. А неправильне визначення контрольних точок тягне за собою спотворення тривимірної реконструкції і, відповідно, спотворення результатів визначення наявності порушень ПДР конкретним ТЗ. Відомий також спосіб забезпечення безпеки дорожнього руху (патент RU 2469890, МПК B60W 30/08, G08G 1/16, G01C 21/04 (2006.01), опубл. 20.12.2012 p.), який включає синхронізацію годин опорних передавачів, вимір часу пробігу радіосигналу від антен трьох або більше опорних радіопередавачів, які знаходяться на віддаленні від ТЗ і пішохода, до антени радіонавігаційного пристрою, що знаходиться на ТЗ або пішоході, обчислення координат ТЗ і пішохода за допомогою обчислювального пристрою, передачу по радіоканалу інформації про координати ТЗ і пішоходів, їх ідентифікаційних номерів у інформаційний комп'ютерний центр, передачу учасникам дорожнього руху попереджувальних сигналів, при цьому уздовж дорожнього полотна у фіксованих точках з відомими тривимірними координатами антен встановлюють радіовишки з опорними радіопередавачами, синхронізацію годин опорних радіопередавачів з годинником інформаційного комп'ютерного центру здійснюють за наявною між ними оптоволоконною лінією зв'язку, створюють цифрову карту дороги шляхом розбиття дорожнього полотна на пікселі з відомими тривимірними координатами, з зазначенням координат і значень дорожніх знаків, світлофорів, на ТЗ встановлюють два радіонавігаційних пристрої, рознесені уздовж поздовжньої осі ТЗ, і за їх постійно вимірюваними тривимірними координатами і по цифровій карті дороги визначають положення ТЗ відносно осьовій лінії дорожнього полотна в будь-який момент часу. Основним недоліком цього способу є необхідність встановлювати радіонавігаційні пристрої на ТЗ і пішоходів, дані про які необхідно зібрати. Практика показує, що автовласники не відгукуються на пропозиції про встановлення радіонавігаційних пристроїв на своїх автомобілях з метою забезпечення контролю за даними ТЗ. При цьому ТЗ, на яких не встановлені радіонавігаційні пристрої, не можуть бути виявлені цим способом, оскільки вони не передають інформацію, необхідну для їх ідентифікації в систему, що робить спосіб вкрай мало функціональним. 1 UA 111239 C2 5 10 15 20 25 30 35 40 45 50 55 60 Відомий також найбільш близький за технічною суттю до того, який заявляється, спосіб реєстрації порушень ПДР (патент RU 2493604, МПК G08G 1/054 (2006.01) опубл. 20.09.2013 Бюл. № 26), при якому за допомогою датчиків вимірювань фізичних величин, які включають принаймні засоби відеофіксації, отримують зображення заданої ділянки дороги з рухомими ТЗ, передають дані в електронно-обчислювальний пристрій по наявних каналах зв'язку, проводять обробку даних про рух ТЗ та дорожню обстановку автоматичними програмними засобами, порівнюють отримані дані про рух ТЗ з допустимими з ПДР на даній ділянці дороги, проводять автоматичну кваліфікацію і фіксацію порушень ПДР і позаштатних ситуацій з ідентифікацією конкретних порушників ПДР, при цьому як засіб відеофіксації використовують одну заздалегідь відкалібровану відеокамеру, обробку даних про рух ТЗ проводять шляхом визначення по зображеннях зазначеної відеокамери положень ТЗ відносно дороги, по якій переміщаються зазначені ТЗ, а по ряду послідовних зображень зазначеної відеокамери визначають і швидкості ТЗ, причому для визначення швидкостей і положень ТЗ щодо дороги в абсолютному масштабі відстаней використовують контрольні точки ТЗ, абсолютні відстані між якими заздалегідь відомі, калібрування відеокамери проводять за допомогою калібрувального шаблону, який розташовують перед відеокамерою на дорозі для ТЗ, на якому виділяють точки, відстані між якими заздалегідь відомі. Також визначення положення ТЗ відносно дороги здійснюють через визначення положення ТЗ щодо використовуваної відеокамери, а положення відеокамери відносно дороги запам'ятовують при калібруванні відеокамери. Недоліком способу по прототипу є відсутність прив'язки даних, одержуваних від відеокамери до часу, в який був зроблений кожен конкретний кадр. На наш погляд, цей недолік є істотним, оскільки відеоряд не може бути доказовою базою щодо порушень ПДР без прив'язки відеокадрів до точного часу їх зйомки, оскільки може бути оскаржений у судовому порядку як недостатній факт доказу провини. Другим недоліком способу по прототипу є необхідність трудомісткого і точного калібрування відеокамери перед початком реалізації цього способу. Від точності калібрування камери залежить чи буде спосіб взагалі придатний для реєстрації порушень ПДР, оскільки визначення положення ТЗ відносно дороги здійснюють через визначення положення ТЗ відносно використовуваної відеокамери, а положення відеокамери відносно дороги запам'ятовують при калібруванні відеокамери. Ще одним недоліком описаного способу по прототипу є необхідність орієнтації на контрольні точки ТЗ, абсолютні відстані між якими заздалегідь відомі для ідентифікації та визначення положення ТЗ відносно дороги в абсолютному масштабі відстаней. У способі по прототипу запропоновано як контрольні точки ТЗ використовувати точки державного номерного знака ТЗ, розміри і малюнок якого задані державним стандартом, або контрольні точки, що належать циферно-буквеному позначенню ТЗ на державному номерному знаку. Але такий підхід, на наш погляд, не є правильним, оскільки в транспортному потоці часто зустрічаються ТЗ, державні реєстраційні номерні знаки яких виконані за державними стандартами різних країн. І орієнтація на один державний стандарт не може бути застосована для таких ТЗ. Також відзначимо, що відомі приймачі сигналів точного часу (ГЛОНАСС, GPS тощо) не дозволяють привласнювати кожному кадру унікальну мітку часу, оскільки приймають сигнал точного часу один раз на певний проміжок часу (орієнтовно один раз в секунду). За цей час камера робить більше одного кадру (кадрова частота відеокамери не менше 24 кадрів в секунду). Відповідно, мінімум 24-м кадрам буде присвоєна однакова мітка часу, що на наш погляд є неприпустимим. Технічним ефектом даного винаходу є забезпечення синхронізації часу і місця розташування ТЗ відносно заздалегідь сформованої моделі ділянки дороги будь-якої геометрії, в тому числі перехресть і залізничних переїздів, і ефективності обробки отриманої інформації, і, як наслідок, об'єктивності отримання інформації про дорожню обстановку і підвищення доказової здатності формованої доказової бази щодо порушень ПДР конкретним ТЗ. Для вирішення поставленої технічної задачі в заявленому способі реєстрації порушень ПДР, при якому за допомогою датчиків вимірювань фізичних величин, які включають принаймні засоби відеофіксації отримують зображення заданої ділянки дороги з рухомими ТЗ, передають дані в електронно-обчислювальний пристрій по наявних каналах зв'язку, проводять обробку даних про рух ТЗ та дорожню обстановку автоматичними програмними засобами, порівнюють отримані дані про рух ТЗ з допустимими по ПДР на даній ділянці дороги, проводять автоматичну кваліфікацію і фіксацію порушень ПДР і позаштатних ситуацій з ідентифікацією конкретних порушників ПДР, згідно з винаходом як датчик вимірювань фізичних величин додатково використовують засіб формування точного часу, що складається з приймача сигналів точного часу і модуля генерації постійної частоти, при цьому попередньо здійснюють 2 UA 111239 C2 5 10 15 20 25 30 35 40 45 50 55 60 формування моделі ділянки дороги, на якій буде здійснюватися реєстрація порушень ПДР, ґрунтуючись на сформованій моделі ділянки дороги формують пакет параметрів інсталяції і налаштувань згаданих датчиків вимірювань фізичних величин та їх взаємозв'язків один з одним, відповідно до якого проводять інсталяцію і налаштування згаданих датчиків, а обробку даних про рух ТЗ та дорожню обстановку здійснюють шляхом перетворення даних отриманих від датчиків вимірювань фізичних величин в координати сформованої моделі ділянки дороги, при цьому автоматичну кваліфікацію і фіксацію порушень ПДР і позаштатних ситуацій проводять ґрунтуючись на теорії графів; при формуванні моделі ділянки дороги, на якій буде здійснюватися реєстрація порушень ПДР, створюють модель ділянки дороги, яка відповідає тій ділянці, на якій буде здійснюватися реєстрація порушень ПДР, наносять всю відповідну дорожню розмітку, вказують дозволені й заборонені напрямки руху і перестроювання, проводять перевірку моделі, яка формується на наявність протиріч, задають світлофорне регулювання, на сформованій моделі визначають зони - неподільні ділянки дороги з нанесеним на них певним видом дорожньої розмітки; формування пакета параметрів інсталяції і налаштувань згаданих датчиків вимірювань фізичних величин та їх взаємозв'язків один з одним проводять на основі даних, отриманих при формуванні моделі ділянки дороги, на якій буде здійснюватися реєстрація порушень ПДР у відповідності з даними, отриманими від самих датчиків вимірювань фізичних величин; на отриманому за допомогою датчиків вимірювань фізичних величин, що включають принаймні засоби відеофіксації, зображенні заданої ділянки дороги, на якій здійснюють реєстрацію порушень ПДР також визначають зони - неподільні ділянки дороги з нанесеним на них певним видом дорожньої розмітки; для зон, визначених на отриманому за допомогою датчиків вимірювань фізичних величин, що включають принаймні засоби відеофіксації, зображенні заданої ділянки дороги, на якій здійснюється реєстрація порушень ПДР, проводять прив'язку до відповідних зон на сформованій моделі ділянки дороги; дані, отримані від датчиків вимірювань фізичних величин, щонайменше від засобу відеофіксації і засобу формування точного часу, зіставляють; обробку даних про рух ТЗ та дорожню обстановку автоматичними програмними засобами проводять шляхом перетворення даних отриманих від датчиків вимірювань фізичних величин в координати треку переміщення на сформованій моделі ділянки дороги з урахуванням заздалегідь визначених зон на моделі ділянки дороги; як трек використовують набір послідовних точок траєкторії руху ТЗ, в якому кожній точці відповідає унікальний момент часу; автоматичну кваліфікацію і фіксацію порушень ПДР і позаштатних ситуацій проводять використовуючи граф виявлення порушень ПДР, причому вершинами графа є зони, визначені на сформованій моделі, а ребрами - дозволені й заборонені переходи між зонами; ідентифікацію конкретних порушників ПДР проводять по розпізнаному державному реєстраційному номерному знаку ТЗ; після автоматичної кваліфікації та фіксації порушень ПДР формують пакети доказової бази, що складаються з відеокадрів з відображеним на них ТЗ з розпізнаним державним реєстраційним номерним знаком з присвоєними їм мітками точного часу, відеокадрів, що підтверджують наявність факту порушення ПДР даним ТЗ з присвоєними їм мітками точного часу, документа про склад порушення ПДР і відправляють сформовані пакети доказової бази на зовнішні приймачі інформації; сформовані пакети доказової бази передають до архіву доказової бази для забезпечення можливості затребування через певний час при необхідності; як датчики вимірювань фізичних величин використовують засоби радіолокації та/або засоби зчитування сигналів керування світлофором. Завдяки тому, що спосіб, який заявляється, передбачає попереднє формування моделі ділянки дороги, на якій проводитиметься реєстрація порушень ПДР, а також використанню додатково як датчика вимірювань фізичних величин щонайменше засобу формування точного часу пропонованої нами конструкції, з подальшою синхронізацією даних, отриманих щонайменше від засобів відеофіксації і від засобів формування точного часу, реалізується можливість кожному кадру, зробленому відеокамерою, присвоювати унікальну мітку точного часу, що дозволяє однозначно інтерпретувати послідовність кадрів. На наш погляд, вкрай важливим є присвоєння кожному кадру саме унікальної, тобто такої, яка не повторюється, мітки часу. Спосіб, що заявляється передбачає включення до складу засобів формування точного часу не тільки приймача сигналів точного часу, а і модуля генерації постійної частоти. При цьому режим роботи модуля генерації постійної частоти співвідноситься з кадровою частотою застосовуваної відеокамери. Так, якщо кадрова частота відеокамери дорівнює 24 кадри/с, то модуль генерації постійної частоти налаштовують таким чином, щоб він генерував не менше 24х імпульсів в секунду. Кожен з імпульсів, який генерується модулем генерації постійної частоти і є унікальною міткою точного часу, яка згодом присвоюється кожному кадру. Модуль генерації постійної частоти регулярно повіряє частоту імпульсів, які посилаються ним, орієнтуючись на 3 UA 111239 C2 5 10 15 20 25 30 35 40 45 50 55 60 одержувані сигнали точного часу від приймача сигналів точного часу. У разі відсутності наступного сигналу точного часу, модуль генерації постійної частоти продовжує генерувати імпульси з частотою, встановленою за попередньої повірки. При реалізації запропонованого способу як датчики вимірювань фізичних величин, крім засобів відео фіксації, можливо використовувати інші датчики вимірювань фізичних величин (наприклад, засоби радіолокації, засоби зчитування сигналів керування світлофором і т.д.). У разі використання різних датчиків вимірювань фізичних величин, засіб формування точного часу присвоює унікальні мітки точного часу всім потокам даних, які надходять від всіх датчиків вимірювань фізичних величин. За способом, який заявляється, кваліфікацію і фіксацію порушень ПДР і позаштатних ситуацій проводять автоматичними програмними засобами, основаними на теорії графів, зокрема графа виявлення порушень ПДР. Автоматична кваліфікація і фіксація порушень ПДР конкретним ТЗ проводиться за допомогою аналізу треку переміщення ТЗ відповідно графу виявлення порушень ПДР, у якому вершинами є зони, визначені на сформованій моделі ділянки дороги, на якій буде здійснюватися реєстрація порушень ПДР, а ребрами - дозволені й заборонені переходи між зонами. Побудова треку переміщення ТЗ проводиться автоматичними програмними засобами на основі даних, отриманих від всіх датчиків вимірювань фізичних величин. Для побудови треку використовують набір послідовних точок траєкторії руху ТЗ, в якому кожній точці відповідає унікальний момент часу. Ідентифікацію ТЗ здійснюють за розпізнаним державним реєстраційним номерним знаком ТЗ. Таким чином можна зробити висновок, що спосіб реєстрації порушень ПДР, який заявляється забезпечує підвищення об'єктивності отримання інформації за рахунок присвоєння вхідним даним міток точного часу, підвищення ефективності обробки інформації про дорожню обстановку шляхом виключення залежності визначення положення ТЗ відносно дороги від визначення положення ТЗ відносно використовуваної відеокамери, а також універсалізацію способу шляхом відмови від орієнтації на контрольні точки ТЗ, абсолютні відстані між якими заздалегідь відомі для ідентифікації та визначення положення ТЗ відносно дороги в абсолютному масштабі відстаней і, як наслідок, підвищення доказової здатності формованої доказової бази щодо порушень ПДР конкретним ТЗ. Варіанти способу реєстрації порушень ПДР, який заявляється, представлені в пунктах формули винаходу, є оптимальними варіантами пропозиції, оскільки забезпечують максимальні технічні ефекти, описані вище. На кресленні представлена схематична послідовність етапів реалізації способу реєстрації порушень ПДР, яка полягає в наступному: Етап 1 - формують модель ділянки дороги, на якій буде здійснюватися реєстрація порушень ПДР. Для цього за допомогою автоматичних програмних засобів створюють модель ділянки дороги, яка відповідає тій ділянці, на якій буде здійснюватися реєстрація порушень ПДР. Потім наносять всю відповідну дорожню розмітку, вказують дозволені й заборонені напрямки руху і перестроювання. Далі автоматичними програмними засобами проводять перевірку моделі, яка формується на наявність протиріч. Після чого моделі задають світлофорне регулювання. На сформованій моделі визначають зони - неподільні ділянки дороги з нанесеним на них певним видом дорожньої розмітки; Етап 2 - формують пакет параметрів інсталяції і налаштувань датчиків вимірювань фізичних величин та їх взаємозв'язків один з одним, ґрунтуючись на сформованій моделі; Етап 3 - проводять інсталяцію і налаштування датчиків вимірювань фізичних величин, які включають щонайменше засоби відеофіксації, на місця, які передбачені сформованим пакетом параметрів інсталяції і налаштувань. Спосіб, який заявляється передбачає можливість певного варіювання при інсталяції та налаштуванні датчиків вимірювань фізичних величин, оскільки сформований пакет параметрів інсталяції і налаштувань містить дані, зазначені у вигляді діапазонів параметрів; Етап 4 - отримують зображення ділянки дороги, на якій здійснюється реєстрація порушень ПДР, зі встановленого засобу відеофіксації. На отриманому зображенні, так, як і на сформованій моделі, позначають зони і проводять прив'язку зон на отриманому зображенні до відповідних зон на сформованій моделі ділянки дороги; Етап 5 - отримують від датчиків вимірювань фізичних величин потоки даних про переміщення ТЗ по ділянці дороги, на якій здійснюється реєстрація порушень ПДР, щонайменше від засобу відеофіксації (зображення з рухомими ТЗ) і від засобу формування точного часу (мітки точного часу) і зіставляють отримані дані; Етап 6 - передають дані в електронно-обчислювальний пристрій по наявних каналах зв'язку; Етап 7 - проводять обробку даних про рух ТЗ та дорожню обстановку автоматичними програмними засобами шляхом перетворення даних отриманих від датчиків вимірювань 4 UA 111239 C2 5 10 15 20 25 30 35 40 45 50 55 60 фізичних величин в координати треку переміщення ТЗ на сформованій моделі ділянки дороги з урахуванням заздалегідь визначених зон на моделі ділянки дороги. Як трек використовують набір послідовних точок траєкторії руху ТЗ, в якому кожній точці відповідає унікальний момент часу; Етап 8 - автоматичними програмними засобами порівнюють отримані дані про рух ТЗ з допустимими по ПДР на даній ділянці дороги, проводять автоматичну кваліфікацію і фіксацію порушень ПДР і нештатних ситуацій з ідентифікацією конкретних порушників ПДР. Ухвалення рішення про наявність порушення ПДР конкретним ТЗ проводиться автоматичним програмним засобом, основаним на теорії графів. У способі реєстрації порушень ПДР, який заявляється графа виявлення порушень ПДР. Вершинами графа виявлення порушень ПДР є зони, визначені на сформованій моделі, а ребрами - дозволені й заборонені переходи між зонами. Ідентифікацію конкретних порушників ПДР проводять по розпізнаному державному реєстраційному номерному знаку ТЗ; Етап 9 - автоматичними програмними засобами формують пакети доказової бази з відеокадрів з присвоєними їм мітками точного часу, також формують документ про склад порушення ПДР і відправляють сформовані пакети доказової бази на зовнішні приймачі інформації. Одночасно сформовані пакети доказової бази потрапляють в архів доказової бази, з якого можуть бути затребувані через певний час при необхідності. Приклад конкретної реалізації способу реєстрації порушень ПДР, який заявляється. Реєстрація порушень ПДР проводиться на ділянці дороги з двостороннім рухом (по дві смуги руху в кожну сторону) і регульованим пішохідним переходом. Попередньо здійснили формування моделі ділянки дороги, на якій буде здійснюватися реєстрація порушень ПДР. З цією метою за допомогою автоматичних програмних засобів створили модель - дорогу з двостороннім рухом, по дві смуги руху в кожну сторону. Потім задали дорожню розмітку - пішохідний перехід, стоп-лінії, розділову смугу, розмітку між смугами руху, вказали дозволені напрямки руху (в конкретному прикладі дозволено рух тільки прямо) і перестроювання (в конкретному прикладі дозволено перестроювання в попутному напрямку), заборонені напрямки руху та перестроювання (в конкретному прикладі - заборонений правий/лівий поворот і розворот). Далі автоматичними програмними засобами провели перевірку моделі, яка формувалася на наявність протиріч. Після чого моделі задали світлофорне регулювання. Також на сформованій моделі визначили зони - неподільні ділянки дороги з нанесеним на них певним видом дорожньої розмітки (для розглянутого прикладу це смуги руху, пішохідний перехід, стоп-лінії, розділова смуга, розмітка між смугами руху). Далі сформували пакет параметрів інсталяції і налаштувань датчиків вимірювань фізичних величин та їх взаємозв'язків один з одним ґрунтуючись на сформованій моделі. У розглянутому прикладі для забезпечення найкращого огляду дорожньої ситуації доцільним є установка одного датчика вимірювань фізичних величин, а саме засобу відеофіксації (відеокамери) в безпосередній близькості від краю дорожнього полотна на висоті 4,5-5,3 м над рівнем дороги на відстані 15-17 м від пішохідного переходу. Спосіб, який заявляється, передбачає можливість певного варіювання при інсталяції та налаштуванні датчиків вимірювань фізичних величин, так як сформований пакет параметрів інсталяції і налаштувань містить дані, зазначені у вигляді діапазонів параметрів. Оскільки в реальних умовах практично неможливо встановити датчики вимірювань фізичних величин чітко на передбачені пакетом параметрів інсталяції і налаштувань місця (з причини відсутності опори, відсутності можливості її встановити на передбаченому місці, або з причини наявності датчиків вимірювань фізичних величин (зокрема відеокамер), які були встановлені раніше і можуть бути використані при реалізації способу, який заявляється), для установки згаданих датчиків вимірювань фізичних величин вибирають місця, найбільш близькі до передбачених пакетом параметрів інсталяції і налаштувань. У розглянутому прикладі відеокамера встановлена на опорі вуличного освітлення на висоті 5,3 м над рівнем дороги на відстані 18 м від пішохідного переходу. Після встановлення датчиків вимірювань фізичних величин (в розглянутому прикладі - відеокамери) отримали зображення заданої ділянки дороги зі встановленого засобу відеофіксації. На отриманому зображенні, так, як і на сформованій моделі, позначили зони і провели їх прив'язку до відповідних зон на сформованій моделі ділянки дороги. Реєстрація порушень ПДР по способу реєстрації порушень ПДР, який заявляється для розглянутого прикладу відбувається наступним чином: за допомогою відеокамери отримують зображення заданої ділянки дороги з рухомими ТЗ. Кожному кадру отриманого зображення за допомогою засобу формування точного часу присвоюють унікальну мітку точного часу. Отримані дані передають в електронно-обчислювальний пристрій по наявних каналах зв'язку, проводять обробку даних про рух ТЗ та дорожню обстановку автоматичними програмними засобами. З цією метою перетворюють дані, які були отримані від 5 UA 111239 C2 5 10 15 20 відеокамери і зіставлені з даними від засобу формування точного часу, в координати треку переміщення ТЗ на сформованій моделі ділянки дороги з урахуванням заздалегідь визначених зон на моделі ділянки дороги. Для побудови треку використовують набір послідовних точок траєкторії руху ТЗ (ідентифікованого по розпізнаному державному реєстраційному номерному знаку), в якому кожній точці відповідає унікальний момент часу. Ухвалення рішення про наявність порушення ПДР конкретним ТЗ проводиться автоматичним програмним засобом, основаним на теорії графів. У способі реєстрації порушень ПДР, який заявляється - графа виявлення порушень ПДР. Вершинами графа виявлення порушень ПДР є зони, визначені на сформованій моделі, а ребрами - дозволені й заборонені переходи між зонами (які для розглянутого прикладу визначені в залежності від світлофорного регулювання та ПДР на даній ділянці дороги). Далі, згідно із запропонованим способом, автоматичними програмними засобами формують пакети доказової бази, що складаються з відеокадрів з розпізнаним державним реєстраційним номерним знаком ТЗ з присвоєними їм мітками точного часу, відеокадрів, що підтверджують наявність факту порушення ПДР, з присвоєними їм мітками точного часу та документа про склад порушення ПДД. Кількість і тип необхідних для формування доказової бази відеокадрів визначається автоматичним програмним засобом залежно від виду ідентифікованого порушення ПДР і місця розташування конкретного ТЗ у момент вчинення порушення ПДР. Сформовані пакети доказової бази відправляють на зовнішні приймачі інформації (для розглянутого прикладу - на пульт обробки інформації про порушення ПДР). Одночасно сформовані пакети доказової бази потрапляють в архів доказової бази, з якого можуть бути затребувані через певний час при необхідності. ФОРМУЛА ВИНАХОДУ 25 30 35 40 45 50 55 60 1. Спосіб реєстрації порушень правил дорожнього руху, при якому за допомогою датчиків вимірювань фізичних величин, які включають принаймні засоби відеофіксації, отримують зображення заданої ділянки дороги з рухомими транспортними засобами, передають дані в електронно-обчислювальний пристрій по наявних каналах зв'язку, проводять обробку даних про рух транспортних засобів та дорожню обстановку автоматичними програмними засобами, порівнюють отримані дані про рух транспортних засобів з допустимими по правилах дорожнього руху на даній ділянці дороги, проводять автоматичну кваліфікацію і фіксацію порушень правил дорожнього руху і позаштатних ситуацій з ідентифікацією конкретних порушників правил дорожнього руху, який відрізняється тим, що кожен датчик вимірювань фізичних величин додатково обладнують засобом формування точного часу, що складається з приймача сигналів точного часу і модуля генерації постійної частоти, при цьому попередньо здійснюють формування моделі ділянки дороги, на якій буде здійснюватися реєстрація порушень правил дорожнього руху, ґрунтуючись на сформованій моделі ділянки дороги формують пакет параметрів інсталяції і налаштувань згаданих датчиків вимірювань фізичних величин та їх взаємозв'язків один з одним, відповідно до якого проводять інсталяцію і налаштування згаданих датчиків, а обробку даних про рух транспортних засобів і дорожню обстановку здійснюють шляхом перетворення даних, отриманих від датчиків вимірювань фізичних величин в координати сформованої моделі ділянки дороги, при цьому автоматичну кваліфікацію і фіксацію порушень правил дорожнього руху та нештатних ситуацій проводять, ґрунтуючись на теорії графів. 2. Спосіб за п. 1, який відрізняється тим, що при формуванні моделі ділянки дороги, на якій буде здійснюватися реєстрація порушень правил дорожнього руху, створюють модель ділянки дороги, яка відповідає тій ділянці, на якій буде здійснюватися реєстрація порушень правил дорожнього руху, наносять всю відповідну дорожню розмітку, вказують дозволені й заборонені напрямки руху і перестроювання, проводять перевірку моделі, яку формують на наявність протиріч, задають світлофорне регулювання, на сформованій моделі визначають зони неподільні ділянки дороги з нанесеним на них певним видом дорожньої розмітки. 3. Спосіб за п. 1, який відрізняється тим, що формування пакета параметрів інсталяції і налаштувань згаданих датчиків вимірювань фізичних величин та їх взаємозв'язків один з одним проводять на основі даних, отриманих при формуванні моделі ділянки дороги, на якій буде здійснюватися реєстрація порушень правил дорожнього руху у відповідності з даними, отриманими від самих датчиків вимірювань фізичних величин. 4. Спосіб за п. 2, який відрізняється тим, що на отриманому за допомогою датчиків вимірювань фізичних величин, які включають принаймні засоби відеофіксації, зображенні заданої ділянки дороги, на якій здійснюють реєстрацію порушень правил дорожнього руху, також визначають зони - неподільні ділянки дороги з нанесеним на них певним видом дорожньої розмітки. 6 UA 111239 C2 5 10 15 20 25 30 5. Спосіб за п. 4, який відрізняється тим, що для зон, визначених на отриманому за допомогою датчиків вимірювань фізичних величин, які включають принаймні засоби відеофіксації, на зображенні заданої ділянки дороги, на якій здійснюється реєстрація порушень правил дорожнього руху, проводять прив'язку до відповідних зон на сформованій моделі ділянки дороги. 6. Спосіб за п. 1, який відрізняється тим, що дані, отримані від датчиків вимірювань фізичних величин, щонайменше від засобу відеофіксації і засобу формування точного часу, зіставляють. 7. Спосіб за п. 1, який відрізняється тим, що обробку даних про рух транспортних засобів і дорожню обстановку автоматичними програмними засобами проводять шляхом перетворення даних, отриманих від датчиків вимірювань фізичних величин в координати треку переміщення транспортного засобу на сформованій моделі ділянки дороги з урахуванням заздалегідь визначених зон на моделі ділянки дороги. 8. Спосіб за п. 7, який відрізняється тим, що як треки, використовують набір послідовних точок траєкторії руху транспортного засобу, в якому кожній точці відповідає унікальний момент часу. 9. Спосіб за п. 1, який відрізняється тим, що автоматичну кваліфікацію і фіксацію порушень правил дорожнього руху та нештатних ситуацій проводять використовуючи граф виявлення порушень правил дорожнього руху, причому вершинами графа є зони, визначені на сформованій моделі, а ребрами - дозволені й заборонені переходи між зонами. 10. Спосіб за п. 7 або п. 9, який відрізняється тим, що ідентифікацію конкретних порушників правил дорожнього руху проводять по розпізнаному державному реєстраційному номерному знаку транспортного засобу. 11. Спосіб за п. 1, який відрізняється тим, що після автоматичної кваліфікації та фіксації порушень правил дорожнього руху формують пакети доказової бази, що складаються з відеокадрів з відображеним на них транспортним засобом з розпізнаним державним реєстраційним номерним знаком з присвоєними їм мітками точного часу, відеокадрів, які підтверджують наявність факту порушення правил дорожнього руху даним транспортним засобом з присвоєними їм мітками точного часу, документа про склад порушення правил дорожнього руху і відправляють сформовані пакети доказової бази на зовнішні приймачі інформації. 12. Спосіб за п. 11, який відрізняється тим, що сформовані пакети доказової бази передають до архіву доказової бази для забезпечення можливості затребування через певний час при необхідності. 13. Спосіб за п. 1, який відрізняється тим, що кожен датчик вимірювань фізичних величин містить засіб радіолокації та/або засіб зчитування сигналів керування світлофором. 7 UA 111239 C2 Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 8
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for recording traffic offences
Автори англійськоюBukhtiiarov Yurii Viktorovych, Balabanova Olha Ihorivna
Назва патенту російськоюСпособ регистрации нарушений правил дорожного движения
Автори російськоюБухтияров Юрий Викторович, Балабанова Ольга Игоревна
МПК / Мітки
МПК: G01C 21/04, G08G 1/017, G07C 5/08, G08G 1/16, G08G 1/052
Мітки: руху, спосіб, реєстрації, дорожнього, порушень, правил
Код посилання
<a href="https://ua.patents.su/10-111239-sposib-reehstraci-porushen-pravil-dorozhnogo-rukhu.html" target="_blank" rel="follow" title="База патентів України">Спосіб реєстрації порушень правил дорожнього руху</a>
Спосіб реєстрації порушень правил дорожнього руху
Номер патенту: 93752
Опубліковано: 10.10.2014
Автори: Бухтіяров Юрій Вікторович, Балабанова Ольга Ігорівна
МПК: G08G 1/054, G01C 21/04, B60W 30/08, G08G 1/01, G08G 1/16
Мітки: правил, руху, реєстрації, порушень, спосіб, дорожнього
Формула / Реферат:
1. Спосіб реєстрації порушень правил дорожнього руху, при якому за допомогою датчиків вимірювань фізичних величин, які включають принаймні засоби відеофіксації отримують зображення заданої ділянки дороги з рухомими транспортними засобами, передають дані в електронно-обчислювальний пристрій по наявних каналах зв'язку, проводять обробку даних про рух транспортних засобів та дорожню обстановку автоматичними програмними засобами, порівнюють...
Спосіб визначення швидкості руху та координат транспортних засобів з подальшою їх ідентифікацією та автоматичною реєстрацією порушень правил дорожнього руху та пристрій для його реалізації
Номер патенту: 105418
Опубліковано: 12.05.2014
Автори: Малінкін Алєксєй Юрьєвіч, Осіпов Сєргєй Константіновіч
МПК: G07C 5/00, G08G 1/017, G08G 1/054
Мітки: дорожнього, пристрій, реалізації, спосіб, швидкості, подальшою, засобів, координат, правил, ідентифікацією, реєстрацією, транспортних, автоматичною, руху, порушень, визначення
Формула / Реферат:
1. Спосіб визначення швидкості руху і координат транспортних засобів з подальшою їх ідентифікацією і автоматичною реєстрацією порушень правил дорожнього руху, який передбачає випромінювання у напрямку транспортних засобів, які рухаються по ділянці дорожнього полотна, імпульсів електромагнітного випромінювання, прийом імпульсів відбитого електромагнітного випромінювання, обчислення дальності і швидкості руху транспортного засобу шляхом...
Спосіб автоматизованого контролю виконання правил дорожнього руху
Номер патенту: 12164
Опубліковано: 16.01.2006
Автори: Васильєв Олександр Павлович, Бурачек Всеволод Германович, Ущенко Валентин Іванович, Зайцев Сергій Анатолійович, Душник Володимир Феліксович
МПК: G08G 1/01
Мітки: дорожнього, виконання, спосіб, руху, контролю, автоматизованого, правил
Формула / Реферат:
Спосіб автоматизованого контролю виконання Правил дорожнього руху, що включає вимірювання швидкості дорожньо-транспортного засобу (ДТЗ), що контролюється, та урахування супутніх факторів фіксування порушень Правил дорожнього руху з застосуванням процесора, який відрізняється тим, що при встановленні факту порушення швидкісного режиму водієм ДТЗ визначають та вводять в пам'ять процесора номер вимірювача швидкості ДТЗ, дату порушення, код...
Спосіб виявлення та інформування про порушення правил дорожнього руху
Номер патенту: 92097
Опубліковано: 25.07.2014
Автор: Резніков Володимир Володимрович
МПК: G06Q 90/00
Мітки: порушення, інформування, виявлення, правил, руху, дорожнього, спосіб
Формула / Реферат:
1. Спосіб виявлення та інформування про порушення правил дорожнього руху, при якому здійснюють передачу інформаційних даних між базами даних систем, що виявляють, обробляють, зберігають та здійснюють пошук даних, який відрізняється тим, що для виявлення та ідентифікації конкретного об'єкта встановлюють технічні засоби, що мають функцію фото та/або відеозапису для фіксації правопорушень у сфері забезпечення безпеки дорожнього руху, інформацію...
Система для персоніфікації дотримання правил дорожнього руху (пдпдр) транспортним засобом та спосіб її використання
Номер патенту: 99251
Опубліковано: 10.08.2012
Автор: Денисов Олександр Костянтинович
МПК: G08G 1/052, G08G 1/017
Мітки: руху, транспортним, персоніфікації, пдпдр, спосіб, система, дотримання, правил, засобом, використання, дорожнього
Формула / Реферат:
1. Система для персоніфікації дотримання правил дорожнього руху транспортним засобом, яка містить приймально-передавальний радіокомплекс (1) з блоком енергозабезпечення (2) та антенами (3), блоком зчитування (4), блоком контролю інформації (5), дешифратором (6), перетворювачем коду (7), пристроєм керування зчитування, накопичення і аналізу отриманої через радіомітки інформації, а також передачі цієї інформації на інші системи, блоком...
Попередній патент: Система автоматизованого моніторингу транспортного потоку
Наступний патент: Пристрій для нанесення покриття на протяжний виріб
Випадковий патент: Хлібниця