Спосіб визначення місцерозташування джерел радіовипромінювання в ближній зоні
Номер патенту: 113916
Опубліковано: 27.02.2017
Автори: Ільченко Михайло Юхимович, Якорнов Євгеній Аркадійович, Цуканов Олег Федорович, Корсак Вікторія Володимирівна, Авдєєнко Гліб Леонідович

Формула / Реферат
Спосіб визначення місця знаходження джерел радіовипромінювання у ближній зоні, який полягає в тому, що приймають випромінюваний ДРВ радіосигнал кожним з ![]() ідентичних елементів еквідистантної лінійної антенної решітки (АР) радіопеленгатора, розташованих один відносно другого на відстані половини середньої довжини хвилі
ідентичних елементів еквідистантної лінійної антенної решітки (АР) радіопеленгатора, розташованих один відносно другого на відстані половини середньої довжини хвилі ![]() частотного діапазону, який підсилюють в кожному приймальному каналі, вимірюють частоту
частотного діапазону, який підсилюють в кожному приймальному каналі, вимірюють частоту ![]() прийнятого сигналу, визначають напрямок приходу сигналу (пеленг), попередньо оцінюють дальність до ДРВ і виконують процедуру уточнення координат ДРВ, яка відрізняється тим, що здійснюють скорочення часу визначення місця розташування ДРВ в БЗ на основі зменшення числа операцій обробки сигналу і їх обсягу та забезпечують можливість визначення місць розташування декількох ДРВ у БЗ, в тому числі й тих ДРВ, що знаходяться на одному пеленгу (
прийнятого сигналу, визначають напрямок приходу сигналу (пеленг), попередньо оцінюють дальність до ДРВ і виконують процедуру уточнення координат ДРВ, яка відрізняється тим, що здійснюють скорочення часу визначення місця розташування ДРВ в БЗ на основі зменшення числа операцій обробки сигналу і їх обсягу та забезпечують можливість визначення місць розташування декількох ДРВ у БЗ, в тому числі й тих ДРВ, що знаходяться на одному пеленгу (![]() ), але на різних відстанях, в наступній послідовності здійснюють попереднє оцінювання дальності до ДРВ і уточнення координат ДРВ, здійснюють попереднє визначення кількості джерел в дальній зоні (ДЗ) по максимумах функції:
), але на різних відстанях, в наступній послідовності здійснюють попереднє оцінювання дальності до ДРВ і уточнення координат ДРВ, здійснюють попереднє визначення кількості джерел в дальній зоні (ДЗ) по максимумах функції:
![]() ,
,
де ![]() - характеристика спрямованості (ХС) окремого елемента АР,
- характеристика спрямованості (ХС) окремого елемента АР,
![]() - максимально правдоподібна вибіркова оцінка кореляційної матриці вхідних сигналів АР,
- максимально правдоподібна вибіркова оцінка кореляційної матриці вхідних сигналів АР,
![]() - розмірність часової вибірки,
- розмірність часової вибірки,
![]() - вектор-стовпець вхідних сигналів АР,
- вектор-стовпець вхідних сигналів АР,
![]() - управляючий вектор-стовпець АР;
- управляючий вектор-стовпець АР;
попереднє обчислення функції визначенням кількості джерел в ближній зоні (БЗ) по максимумах функції:
![]() ,
,
де  ,
,
![]() , в декількох точках БЗ на фіксованих відстанях
, в декількох точках БЗ на фіксованих відстанях ![]() :
:
![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() і т.д.,
і т.д.,
де ![]() - границя ДЗ; визначення з отриманої сукупності відстаней
- границя ДЗ; визначення з отриманої сукупності відстаней ![]() тих пар суміжних значень
тих пар суміжних значень ![]() , що описують діапазони відстаней
, що описують діапазони відстаней ![]() , при яких спостерігають максимальні "сплески" функції
, при яких спостерігають максимальні "сплески" функції ![]() для конкретизації тих частин БЗ, в яких знаходяться шукані ДРВ; здійснюють розбиття кожного діапазону
для конкретизації тих частин БЗ, в яких знаходяться шукані ДРВ; здійснюють розбиття кожного діапазону ![]() на піддіапазони з кроком
на піддіапазони з кроком ![]() і обчислюють функції
і обчислюють функції ![]() в точках
в точках ![]() ,
, ![]() ; визначають за отриманою сукупністю
; визначають за отриманою сукупністю ![]() шукану дальність
шукану дальність ![]() і пеленг
і пеленг ![]() за правилом
за правилом ![]() ,
, ![]() , причому оцінка дальності буде тим точніша, чим менший крок
, причому оцінка дальності буде тим точніша, чим менший крок ![]() .
.
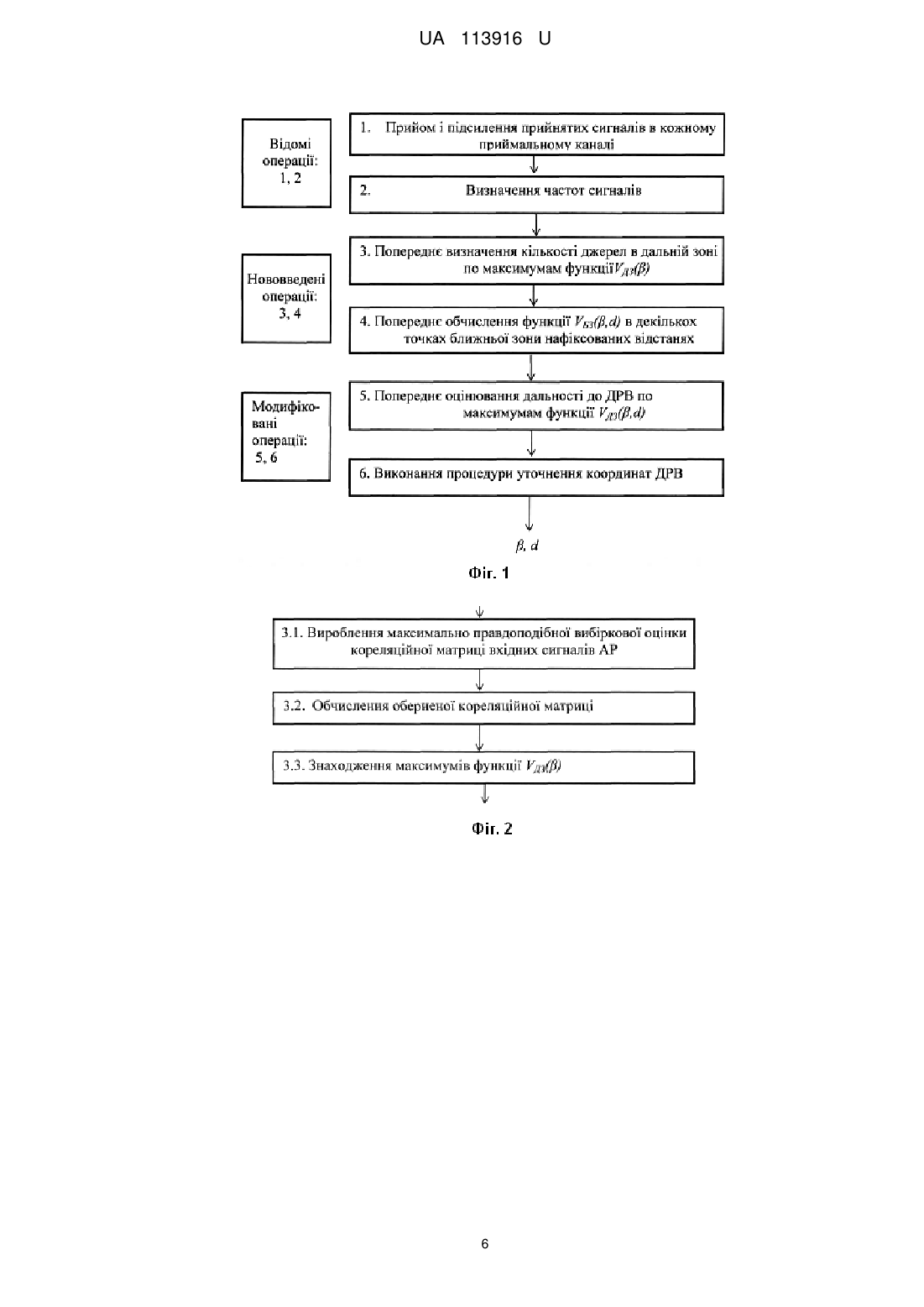
Текст
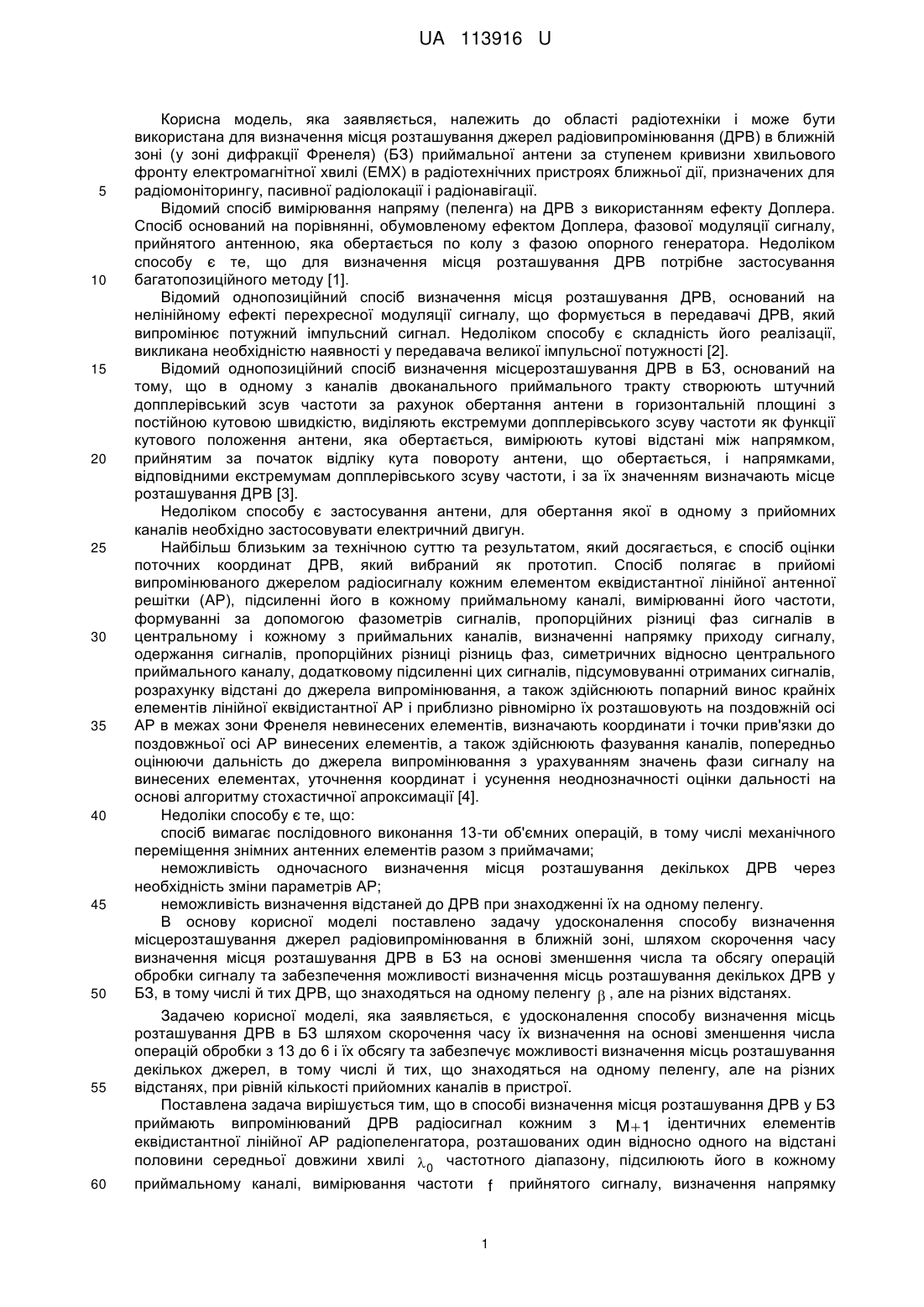
Реферат: Спосіб визначення місця знаходження джерел радіовипромінювання у ближній зоні, який полягає в тому, що приймають випромінюваний ДРВ радіосигнал кожним з M 1 ідентичних елементів еквідистантної лінійної антенної решітки (АР) радіопеленгатора, розташованих один відносно другого на відстані половини середньої довжини хвилі 0 частотного діапазону, який підсилюють в кожному приймальному каналі, вимірюють частоту f прийнятого сигналу, визначають напрямок приходу сигналу (пеленг), попередньо оцінюють дальність до ДРВ і виконують процедуру уточнення координат ДРВ, причому здійснюють скорочення часу визначення місця розташування ДРВ в БЗ на основі зменшення числа операцій обробки сигналу і їх обсягу та забезпечують можливість визначення місць розташування декількох ДРВ у БЗ, в тому числі й тих ДРВ, що знаходяться на одному пеленгу ( ), але на різних відстанях, в наступній послідовності здійснюють попереднє оцінювання дальності до ДРВ і уточнення координат ДРВ, здійснюють попереднє визначення кількості джерел в дальній зоні (ДЗ). UA 113916 U (12) UA 113916 U UA 113916 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель, яка заявляється, належить до області радіотехніки і може бути використана для визначення місця розташування джерел радіовипромінювання (ДРВ) в ближній зоні (у зоні дифракції Френеля) (БЗ) приймальної антени за ступенем кривизни хвильового фронту електромагнітної хвилі (ЕМХ) в радіотехнічних пристроях ближньої дії, призначених для радіомоніторингу, пасивної радіолокації і радіонавігації. Відомий спосіб вимірювання напряму (пеленга) на ДРВ з використанням ефекту Доплера. Спосіб оснований на порівнянні, обумовленому ефектом Доплера, фазової модуляції сигналу, прийнятого антенною, яка обертається по колу з фазою опорного генератора. Недоліком способу є те, що для визначення місця розташування ДРВ потрібне застосування багатопозиційного методу [1]. Відомий однопозиційний спосіб визначення місця розташування ДРВ, оснований на нелінійному ефекті перехресної модуляції сигналу, що формується в передавачі ДРВ, який випромінює потужний імпульсний сигнал. Недоліком способу є складність його реалізації, викликана необхідністю наявності у передавача великої імпульсної потужності [2]. Відомий однопозиційний спосіб визначення місцерозташування ДРВ в БЗ, оснований на тому, що в одному з каналів двоканального приймального тракту створюють штучний допплерівський зсув частоти за рахунок обертання антени в горизонтальній площині з постійною кутовою швидкістю, виділяють екстремуми допплерівського зсуву частоти як функції кутового положення антени, яка обертається, вимірюють кутові відстані між напрямком, прийнятим за початок відліку кута повороту антени, що обертається, і напрямками, відповідними екстремумам допплерівського зсуву частоти, і за їх значенням визначають місце розташування ДРВ [3]. Недоліком способу є застосування антени, для обертання якої в одному з прийомних каналів необхідно застосовувати електричний двигун. Найбільш близьким за технічною суттю та результатом, який досягається, є спосіб оцінки поточних координат ДРВ, який вибраний як прототип. Спосіб полягає в прийомі випромінюваного джерелом радіосигналу кожним елементом еквідистантної лінійної антенної решітки (АР), підсиленні його в кожному приймальному каналі, вимірюванні його частоти, формуванні за допомогою фазометрів сигналів, пропорційних різниці фаз сигналів в центральному і кожному з приймальних каналів, визначенні напрямку приходу сигналу, одержання сигналів, пропорційних різниці різниць фаз, симетричних відносно центрального приймального каналу, додатковому підсиленні цих сигналів, підсумовуванні отриманих сигналів, розрахунку відстані до джерела випромінювання, а також здійснюють попарний винос крайніх елементів лінійної еквідистантної АР і приблизно рівномірно їх розташовують на поздовжній осі АР в межах зони Френеля невинесених елементів, визначають координати і точки прив'язки до поздовжньої осі АР винесених елементів, а також здійснюють фазування каналів, попередньо оцінюючи дальність до джерела випромінювання з урахуванням значень фази сигналу на винесених елементах, уточнення координат і усунення неоднозначності оцінки дальності на основі алгоритму стохастичної апроксимації [4]. Недоліки способу є те, що: спосіб вимагає послідовного виконання 13-ти об'ємних операцій, в тому числі механічного переміщення знімних антенних елементів разом з приймачами; неможливість одночасного визначення місця розташування декількох ДРВ через необхідність зміни параметрів АР; неможливість визначення відстаней до ДРВ при знаходженні їх на одному пеленгу. В основу корисної моделі поставлено задачу удосконалення способу визначення місцерозташування джерел радіовипромінювання в ближній зоні, шляхом скорочення часу визначення місця розташування ДРВ в БЗ на основі зменшення числа та обсягу операцій обробки сигналу та забезпечення можливості визначення місць розташування декількох ДРВ у БЗ, в тому числі й тих ДРВ, що знаходяться на одному пеленгу , але на різних відстанях. Задачею корисної моделі, яка заявляється, є удосконалення способу визначення місць розташування ДРВ в БЗ шляхом скорочення часу їх визначення на основі зменшення числа операцій обробки з 13 до 6 і їх обсягу та забезпечує можливості визначення місць розташування декількох джерел, в тому числі й тих, що знаходяться на одному пеленгу, але на різних відстанях, при рівній кількості прийомних каналів в пристрої. Поставлена задача вирішується тим, що в способі визначення місця розташування ДРВ у БЗ приймають випромінюваний ДРВ радіосигнал кожним з M 1 ідентичних елементів еквідистантної лінійної АР радіопеленгатора, розташованих один відносно одного на відстані половини середньої довжини хвилі 0 частотного діапазону, підсилюють його в кожному приймальному каналі, вимірювання частоти f прийнятого сигналу, визначення напрямку 1 UA 113916 U приходу сигналу(пеленгу), здійснюють попереднє оцінювання дальності до ДРВ і уточнення координат ДРВ та попереднє визначають кількості джерел в дальній зоні (ДЗ) по максимумах функції: 5 VДЗ() 1 F 2 ˆ () SH () R 1 S () xx , де F() - характеристика спрямованості (ХС) окремого елемента АР, 10 1 K ˆ R xx X(tk )XH(tk ) - максимально правдоподібна вибіркова оцінка кореляційної матриці 2K k 1 вхідних сигналів АР, k - розмірність часової вибірки, X( t ) x1( t ) x 2 ( t )...xN ( t )T - вектор-стовпець вхідних сигналів АР, S () - управляючий вектор-стовпець АР; попереднє обчислення функції визначенням кількості джерел в ближній зоні (БЗ) по максимумах функції: 15 VБЗ (, d) 20 1 ˆ F2 () SH (, d) R 1 S (, d) xx , 1 exp( jkd 1(, d)) де S (, d) , exp( jkd M (, d)) k 2 / , в декількох точках БЗ на фіксованих відстанях dn : d1 RДЗ , d2 0,75R ДЗ , d3 0,5R ДЗ , d4 0,25R ДЗ , 25 30 35 40 45 d5 0,125R ДЗ і т.д., де R Д З - границя ДЗ; визначення з отриманої сукупності відстаней (d1,..., dn ) тих пар суміжних значень (di, di1) , що описують діапазони відстаней d di di1 , при яких спостерігають максимальні "сплески" функції V(, d) для конкретизації тих частин БЗ, в яких знаходяться шукані ДРВ; здійснюють розбиття кожного діапазону d на піддіапазони з кроком d (d N d) і обчислюють функції V(, d) в точках dn di nd , n 1...N ; визначають за отриманою сукупністю V1, d1...Vn, dn шукану дальність dn і пеленг за правилом (d, ) arg max( V(i, di )) , i 1...N , причому оцінка дальності буде тим точніша, чим менший крок d . Запропонований спосіб визначення місця розташування ДРВ у БЗ відрізняється наявністю нових і модифікованих операцій. У зв'язку з цим запропонований спосіб визначення місця розташування ДРВ у БЗ відповідає такому критерію корисної моделі як "новизна". Заявлена корисна модель є промислово придатною, оскільки вона крім визначення місця розташування ДРВ в БЗ приймальної антени за ступенем кривизни хвильового фронту ЕМХ в радіотехнічних пристроях ближньої дії, призначених для радіомоніторингу місць розташування декількох ДРВ на різних частотах, може бути використана також в галузях пасивної радіолокації і радіонавігації. Суть технічного рішення, що заявляється, пояснюється кресленням Фіг. 1-7. На Фіг. 1 представлена сукупність операцій, які становлять суть запропонованого способу, де позначено: 1, 2: відомі операції; 3, 4: нововведені операції; 2 UA 113916 U 5 10 15 20 25 5, 6: модифіковані операції. На Фіг. 2 представлено послідовність визначення пеленгу за алгоритмом Кейпона [5] (операція 3). На Фіг. 3 - алгоритм визначення пеленгу і відстані до ДРВ за модифікованим алгоритмом Кейпона (операції: 4-6). На Фіг. 4, 5 наведені види фронтів ЕМХ при розташуванні ДРВ в ДЗ (а - плоский) та БЗ (б близький до сферичного) відносно елементів лінійної АР при припущенні, що їх антени є точковими джерелами. На Фіг. 6 представлені максимуми функції VДЗ() при моделюванні по алгоритму Кейпона для плоского фронту ЕМХ. На Фіг. 7 показані кроки відстаней при обчисленні функції V(, d) . На Фіг. 8 - структурна схема пристрою для реалізації запропонованогоспособу, де 1 - M 1 елементів лінійної АР, 2 - M 1 приймальних каналів, 3 - частотомір, 4 - блок сполучення, 5 - мікропроцесор. Спосіб реалізують наступним чином. При наявності сигналів від ДРВ здійснюють їх виявлення кожним з (+1) прийомних каналів (операція 1) і визначають їхні несучі частоти (операція 2). В прийомних каналах здійснюють перетворення аналогових сигналів в цифрові. Визначають кількості джерел в припущенні, що вони знаходяться в ДЗ, по максимумах функції VДЗ() відповідно до відомого алгоритму Кейпона (операція 3). Даний алгоритм є алгоритмом пеленгації ДРВ високої роздільної здатності та передбачає обчислення значень вихідних сигналів лінійної АР, на яку приходить ЕМХ з плоским фазовим фронтом (Фіг. 4) в наступній послідовності (Фіг. 2): 1) розраховують максимально правдоподібну вибіркову оцінку кореляційної матриці (KM) вхідних сигналів АР (операція 3.1): 1 K ˆ R xx X(tk )XH(tk ) , (1) 2K k 1 30 35 де X( t ) x1( t ) x 2 ( t )...xN ( t )T - вектор-стовпець вхідних сигналів АР; k - розмірність часової вибірки; 2) розраховують обернену KM (1) (операція 3.2); 3) здійснюють оцінку напрямків приходу сигналів, знаходять максимуми (Фіг. 6) функції (операція 3.3): VДЗ() 40 1 F 2 ˆ () SH () R 1 S () xx , (2) де F() - ХС окремого елемента АР, S () - управляючий вектор-стовпець ДР, який має вигляд: 1 exp( j(2L sin ) / ) , (3) S () exp( j((N 1)L sin ) / ) 45 - довжина хвилі. Обчислюють функції VБЗ (, d) на фіксованих відстанях d (операція 4). Для цього необхідно модифікувати алгоритм Кейпона (Фіг. 3), оскільки набіги фаз між елементами АР (Фіг. 4) залежать не тільки від пеленга, а й дальності. Набіги фаз (Фіг. 5) можна записати наступним чином: 3 UA 113916 U 2 1 k d 2 2 N 1 L(N 1) 2 (d1 d0 ) dx dx d0 2d0 cos( 90 ) . 2 2 Тоді функцію (2) можна уявити у вигляді: 5 VБЗ (, d) 1 F 2 ˆ () SH (, d) R 1 S (, d) xx , (4) а управляючий вектор-стовпець АР (3) трансформується до вигляду: 1 exp( jkd 1(, d)) , (5) S (, d) exp( jkd M (, d)) 10 де k 2 / . Фіксованими відстанями dn можуть бути, наприклад, дальності: d1 RДЗ , d2 0,75R ДЗ , 15 d3 0,5R ДЗ , d4 0,25R ДЗ , d5 0,125R ДЗ і т.д., 20 25 30 35 40 45 де R Д З - границя ДЗ. Визначають з сукупності (d1,...dn ) значень (di, di1) , d di di1 , при яких "сплески" функції V(, d) максимальні (операція 5.1). Здійснюють розбиття діапазону d на піддіапазони з кроком d (d Nd) (Фіг. 6) і обчислюють функції V(, d) в точках dn di nd , n 1...N (операція 5.2). Визначають за значеннями ( V(1, d1)...V(n, dn )) дальності d і пеленга ДРВ за правилом (d, ) arg max( V(i, di )) , i 1...N (операція 6). Оцінка можливості реалізації та ефективності запропонованого способу проводилась математичними методами моделювання на ЕОМ в програмному середовищі MathCad. Таким чином, запропонована корисна модель удосконалює спосіб визначення місць розташування ДРВ в БЗ шляхом скорочення часу їх визначення на основі зменшення числа операцій обробки сигналу і їх обсягу та забезпечує можливості визначення місць розташування декількох джерел, в тому числі й тих, що знаходяться на одному пеленгу, але на різних відстанях, при рівній кількості прийомних каналів в запропонованому способі. Джерела інформації: 1. Вартанесян В.А. "Радиоэлектронная разведка". - Μ.: Воениздат, 1975 p. - С. 232-236. 2. Авдеев В.Б., Панычев С.Н. "Нелинейная радиодальнометрия источника радиоизлучения методом преднамеренной перекрестной модуляции его сигналов". - Радиотехника, 2004 г. - № 9. - С. 74-76. 3. Патент России № 2308735 МПК G01S 5/08 (2006.01). "Способ определения местоположения источников радиоизлучения в ближней зоне" / Дидук Л.И., Акиныпина Г.Н., Никольский В.И.; опубл. 20.10.2007. 4. Патент России № 2231806 МПК. G01S 5/08. "Способ оценки текущих координат источника радиоизлучения" / Арапов Д.П., Лихачев В.П.; опубл. 27.06.2004. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Спосіб визначення місця знаходження джерел радіовипромінювання у ближній зоні, який полягає в тому, що приймають випромінюваний ДРВ радіосигнал кожним з M 1 ідентичних 4 UA 113916 U 5 10 елементів еквідистантної лінійної антенної решітки (АР) радіопеленгатора, розташованих один відносно другого на відстані половини середньої довжини хвилі 0 частотного діапазону, який підсилюють в кожному приймальному каналі, вимірюють частоту f прийнятого сигналу, визначають напрямок приходу сигналу (пеленг), попередньо оцінюють дальність до ДРВ і виконують процедуру уточнення координат ДРВ, яка відрізняється тим, що здійснюють скорочення часу визначення місця розташування ДРВ в БЗ на основі зменшення числа операцій обробки сигналу і їх обсягу та забезпечують можливість визначення місць розташування декількох ДРВ у БЗ, в тому числі й тих ДРВ, що знаходяться на одному пеленгу ( ), але на різних відстанях, в наступній послідовності здійснюють попереднє оцінювання дальності до ДРВ і уточнення координат ДРВ, здійснюють попереднє визначення кількості джерел в дальній зоні (ДЗ) по максимумах функції: 1 , VДЗ() 2 H ˆ F () S () R 1 S () xx де F() - характеристика спрямованості (ХС) окремого елемента АР, 15 1 K ˆ R xx X(tk )XH(tk ) - максимально правдоподібна вибіркова оцінка кореляційної матриці 2K k 1 вхідних сигналів АР, k - розмірність часової вибірки, X( t ) x1( t ) x 2 ( t )...xN ( t )T - вектор-стовпець вхідних сигналів АР, 20 S () - управляючий вектор-стовпець АР; попереднє обчислення функції визначенням кількості джерел в ближній зоні (БЗ) по максимумах функції: 1 , VБЗ (, d) 2 H ˆ F () S (, d) R 1 S (, d) xx 1 exp( jkd 1(, d)) де S (, d) , exp( jkd M (, d)) k 2 / , в декількох точках БЗ на фіксованих відстанях dn : d1 R ДЗ , d2 0,75R ДЗ , d3 0,5R ДЗ , d4 0,25R ДЗ , d5 0,125R ДЗ і т. д., 25 де R Д З - границя ДЗ; визначення з отриманої сукупності відстаней (d1, ..., dn ) тих пар суміжних значень (di, di1) , що описують діапазони відстаней d di di1 , при яких спостерігають максимальні "сплески" функції V(, d) для конкретизації тих частин БЗ, в яких знаходяться шукані ДРВ; здійснюють розбиття кожного діапазону d на піддіапазони з кроком d (d N d) 30 і обчислюють функції V(, d) в точках dn di nd , n 1...N ; визначають за отриманою V1, d1...Vn, dn шукану дальність dn і пеленг за правилом сукупністю (d,) argmax( V(i, di )) , i 1...N , причому оцінка дальності буде тим точніша, чим менший крок d . 5 UA 113916 U 6 UA 113916 U 7 UA 113916 U Комп’ютерна верстка Т. Вахричева Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП "Український інститут інтелектуальної власності", вул. Глазунова, 1, м. Київ – 42, 01601 8
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01S 5/08
Мітки: місцерозташування, зони, джерел, радіовипромінювання, ближній, спосіб, визначення
Код посилання
<a href="https://ua.patents.su/10-113916-sposib-viznachennya-misceroztashuvannya-dzherel-radioviprominyuvannya-v-blizhnijj-zoni.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення місцерозташування джерел радіовипромінювання в ближній зоні</a>
Спосіб визначення місцеположення джерел радіовипромінювання і система для його здійснення
Номер патенту: 21335
Опубліковано: 02.12.1997
Автори: Мєдвєдєв Сергій Леонідович, Литвиненко Валентин Іванович, Сирма Олексій Олексійович, Лігінов Сергій Михайлович, Гудзюк Василь Петрович, Муратов Олександр Олексійович
МПК: G01S 5/12
Мітки: джерел, радіовипромінювання, спосіб, визначення, система, здійснення, місцеположення
Формула / Реферат:
1. Способ определения местоположения источников радиоизлучения, заключающийся в приеме сигнала в N пространственно разнесенных измерительных приемных пунктах, идентичных по составу, с известными координатами, причем N больше или равно 2, один из которых является центральным измерительным приемным пунктом, а другой (-ие) ретрансляционным (-ными) измерительным (-ными) пунктом (-ами) с переносом спектра радиосигнала, получении за один...
Спосіб пеленгації джерел радіовипромінювання з частотним поділом сигналів
Номер патенту: 4882
Опубліковано: 15.02.2005
Автори: КУБРАК ОЛЕКСАНДР МИКОЛАЙОВИЧ, БОЛОБАН СЕРГІЙ ІВАНОВИЧ
МПК: G01S 3/02
Мітки: пеленгації, спосіб, джерел, частотним, сигналів, поділом, радіовипромінювання
Формула / Реферат:
Спосіб пеленгації джерел радіовипромінювання з частотним поділом сигналів, що включає когерентний прийом сигналів N-елементною антенною решіткою (АР) з багатоканальним приймачем, один з каналів якої є опорним, синхронне перетворення прийнятих елементами АР сигналів у цифрові сигнали аналого-цифровими перетворювачами в кожному каналі, здійснення спектрального аналізу у всіх каналах АР, проведення в спецпроцесорі для кожного частотного...
Спосіб двоканального моноімпульсного вимірювання миттєвої частоти джерел радіовипромінювання станціями радіомоніторингу
Номер патенту: 107253
Опубліковано: 25.05.2016
Автори: Ільницький Анатолій Іванович, Войтко Віталій Віталійович, Казаров Андрій Арташевич
МПК: G01S 3/02
Мітки: частоти, радіомоніторингу, вимірювання, двоканального, радіовипромінювання, джерел, спосіб, моноімпульсного, миттєвої, станціями
Формула / Реферат:
Спосіб двоканального моноімпульсного вимірювання миттєвої частоти джерел радіовипромінювання станціями радіомоніторингу в умовах часткової або повної невизначеності параметрів вхідних сигналів, який відрізняється тим, що з метою підвищення точності визначення частоти вхідних сигналів на базі фазометра інтерференційного типу у структурній схемі вимірювача використовують два ідентичні фазометричні канали вимірювання частоти - основний (грубий)...
Спосіб двоканального фазового моноімпульсного пеленгування джерел радіовипромінювання станціями радіомоніторингу
Номер патенту: 107503
Опубліковано: 10.06.2016
Автори: Войтко Віталій Віталійович, Казаров Андрій Арташевич, Ільницький Анатолій Іванович
МПК: G01S 3/50, G01S 3/02, G01S 3/74
Мітки: фазового, джерел, двоканального, станціями, спосіб, пеленгування, моноімпульсного, радіомоніторингу, радіовипромінювання
Формула / Реферат:
Спосіб двоканального фазового моноімпульсного пеленгування джерел радіовипромінювання станціями радіомоніторингу, який відрізняється тим, що в процесі обчислення оцінок пеленгу враховують значення миттєвої несучої частоти для компенсації похибок, які виникають внаслідок невідповідності постійної фазометричної бази та невідомої довжини хвилі вхідного сигналу, а для усунення неробочих ділянок основної дискримінаційної характеристики навколо...
Пристрій двоканального моноімпульсного вимірювання миттєвої частоти джерел радіовипромінювання станціями радіомоніторингу
Номер патенту: 107254
Опубліковано: 25.05.2016
Автори: Казаров Андрій Арташевич, Ільницький Анатолій Іванович, Войтко Віталій Віталійович
МПК: G01S 3/00
Мітки: частоти, станціями, джерел, двоканального, вимірювання, миттєвої, моноімпульсного, радіовипромінювання, радіомоніторингу, пристрій
Формула / Реферат:
Пристрій двоканального моноімпульсного вимірювання миттєвої частоти джерел радіовипромінювання станціями радіомоніторингу в умовах часткової або повної невизначеності параметрів, який відрізняється тим, що з метою моноімпульсного вимірювання миттєвої частоти вхідних сигналів на базі одноканального фазометра інтерференційного типу введені: додатковий фазометричниий канал точного вимірювання частоти (8-14) і спеціальний обчислювач на чотири...
Попередній патент: Установка для одержання мастил на мильних загусниках
Наступний патент: Портативна вітроелектростанція
Випадковий патент: Спосіб корекції ендотеліальної дисфункції та профілактики уражень артерій у хворих на гіпертонічну хворобу