Спосіб експлуатації сільськогосподарської робочої машини та сільськогосподарська робоча машина
Формула / Реферат
1. Спосіб експлуатації сільськогосподарської робочої машини (1), до якої під'єднується начіпне знаряддя або робочий орган (3), який керується розподільним пристроєм (28), що розташований на робочій машині (1), який відрізняється тим, що під час під'єднання начіпного знаряддя або робочого органу (3) до робочої машини (1) за допомогою шинної системи (25) відбувається обмін даними між блоком керування (27) начіпного знаряддя або робочого органу (3) та розподільним пристроєм (28) робочої машини (1), та тим, що на основі даних, що їх отримано блоком керування (27) від розподільного пристрою (28), блок керування (27) здійснює перевірку того, чи є розподільний пристрій (28) автоматично конфігурованим.
2. Спосіб за п. 1, який відрізняється тим, що при позитивному результаті перевірки блоком керування (27) здійснюється запит до розподільного пристрою (28), який уможливлює ідентифікацію робочої машини (1).
3. Спосіб за п. 2, який відрізняється тим, що запитана інформація оцінюється блоком керування (27) із метою з'ясування того, чи було начіпне знаряддя або робочий орган (3) раніше під'єднано до робочої машини (1).
4. Спосіб за п. 3, який відрізняється тим, що при позитивному результаті оцінювання блоком керування (27) ці робочі дані передаються до розподільного пристрою (28), на основі чого здійснюється автоматичне калібрування та налаштування начіпного знаряддя або робочого органу (3).
5. Спосіб за п. 3, який відрізняється тим, що при негативному результаті оцінювання блоком керування (27) основні робочі дані, що зберігаються у ньому, передаються до розподільного пристрою (28), на основі чого здійснюється перше калібрування та основне налаштування начіпного знаряддя або робочого органу (3) для початку експлуатації.
6. Спосіб за п. 1, який відрізняється тим, що після калібрування та основного налаштування уручну начіпного знаряддя або робочого органу (3) ці дані передаються через розподільний пристрій (28) на блок керування (27) та зберігаються у ньому.
7. Спосіб за п. 6, який відрізняється тим, що після калібрування та основного налаштування уручну начіпного знаряддя або робочого органу (3) дані щодо ідентифікації робочої машини (1) передаються через розподільний пристрій (28) на блок керування (27) та зберігаються у ньому.
8. Сільськогосподарська робоча машина (1), до якої під'єднується начіпне знаряддя або робочий орган (3), який керується розподільним пристроєм (28), що розташований на робочій машині (1), оснащена для здійснення способу за пп. 1-7, яка відрізняється тим, що під час під'єднання начіпного знаряддя або робочого органу (3) до робочої машини (1) за допомогою шинної системи (25) відбувається обмін даними між блоком керування (27) начіпного знаряддя або робочого органу (3) та розподільним пристроєм (28) робочої машини (1), та тим, що на основі даних, що їх отримано блоком керування (27) від розподільного пристрою (28) блок керування (27) здійснює перевірку того, чи є розподільний пристрій (28) автоматично конфігурованим.
9. Робоча машина (1) за п. 8, якa відрізняється тим, що блок керування (27) виконано для керування виконувальними елементами (7, 8, 13) на начіпному знарядді або робочому органі (3).
10. Робоча машина (1) за одним із пп. 8 або 9, яка відрізняється тим, що блок керування (27) має зв'язок із датчиками (21, 22), що їх розташовано на начіпному знарядді або робочому органі (3).
11. Робоча машина (1) за одним із пп. 8-10, яка відрізняється тим, що струмопровідні дроти розподільного пристрою (28) робочої машини (1) та блока керування (27) начіпного знаряддя або робочого органу з'єднуються за допомогою з'єднувальних елементів (26), які поряд із струмопровідними дротами додатково мають інтерфейс шини для поєднання шинної системи (25) робочої машини (1) із начіпним знаряддям або робочим органом (3).
12. Робоча машина (1) за одним із пп. 8-11, яка відрізняється тим, що робоча машина виконана у вигляді зернового комбайна, силосозбирального комбайна або трактора.
13. Робоча машина (1) за одним із пп. 8-12, яка відрізняється тим, що робочий орган, що під'єднується до робочої машини, виконаний у вигляді жниварки, кукурудзяного качанозбирача, кукурудзяної приставки тощо.
14. Робоча машина (1) за одним із пп. 8-12, яка відрізняється тим, що начіпне знаряддя, що під'єднується до робочої машини, виконане у вигляді валкувача, сівалки, фронтального навантажувача тощо.
Текст
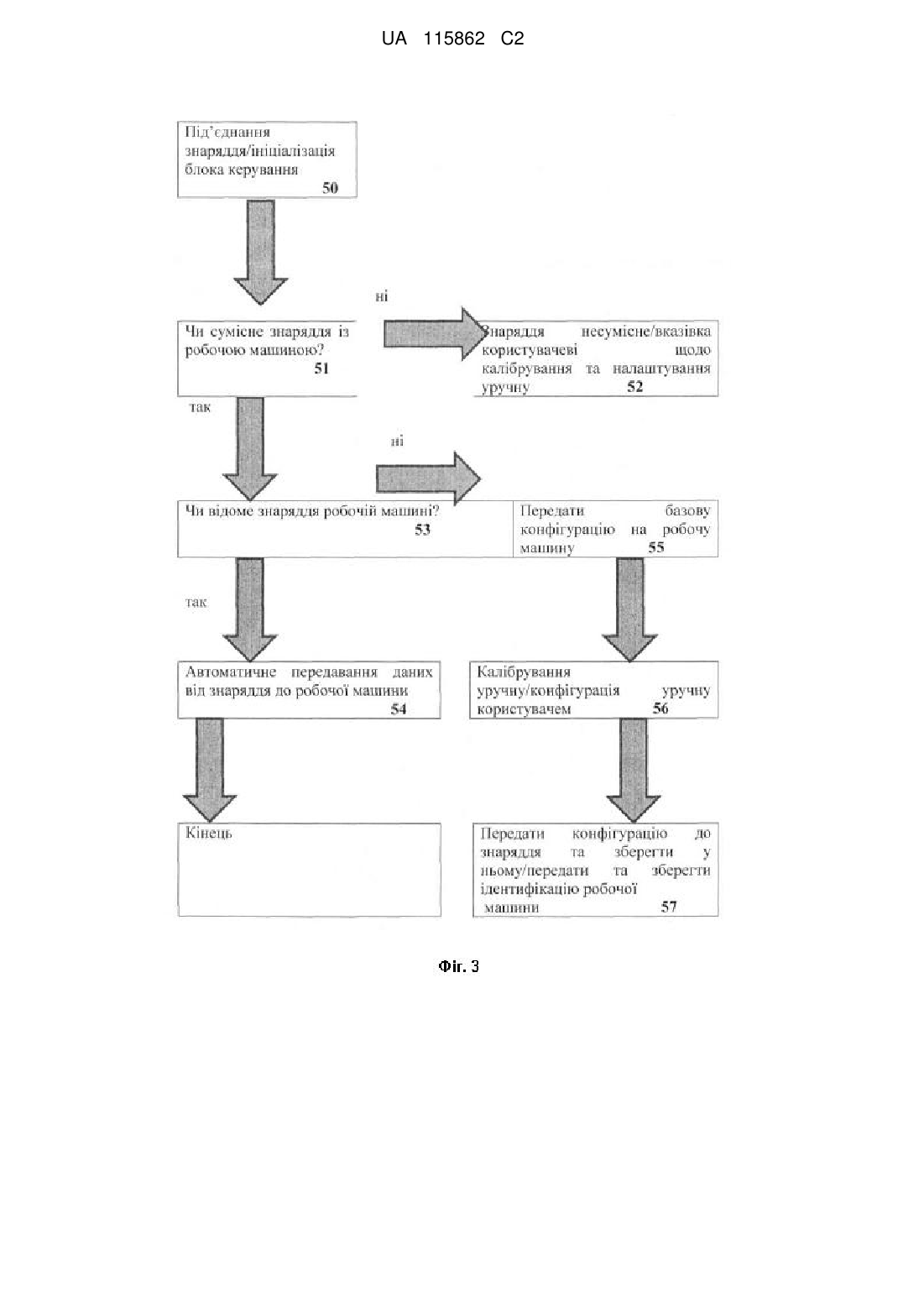
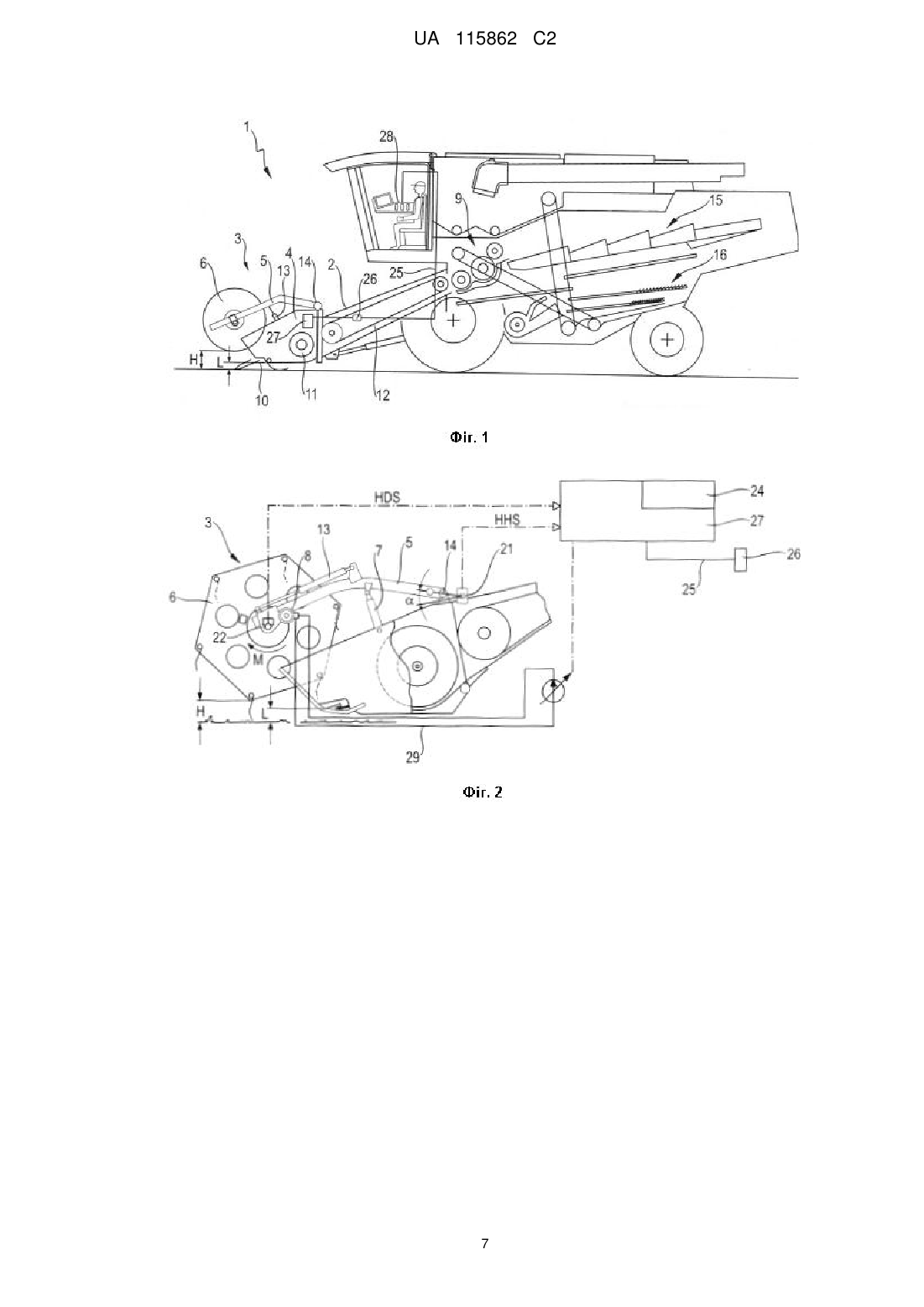
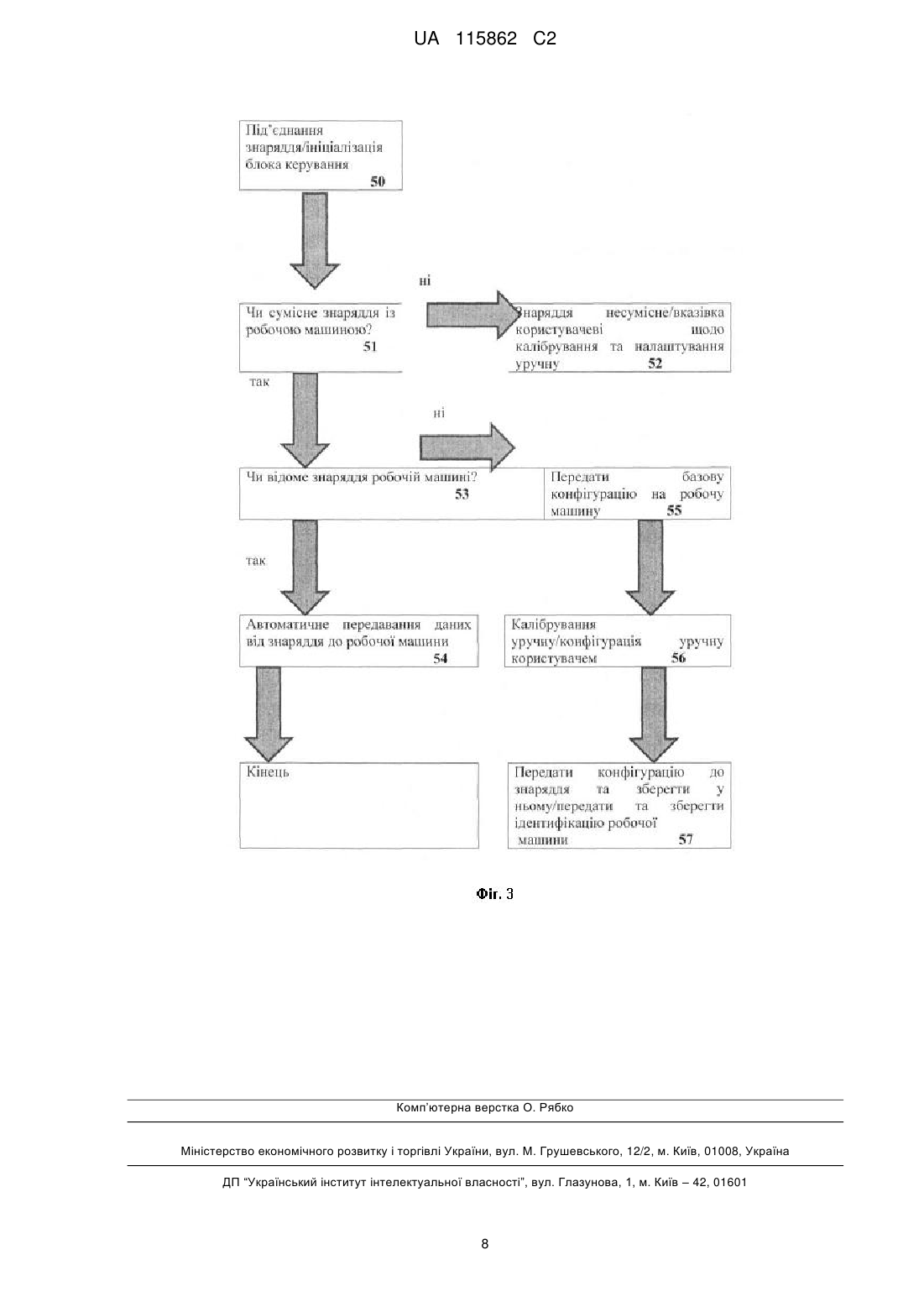
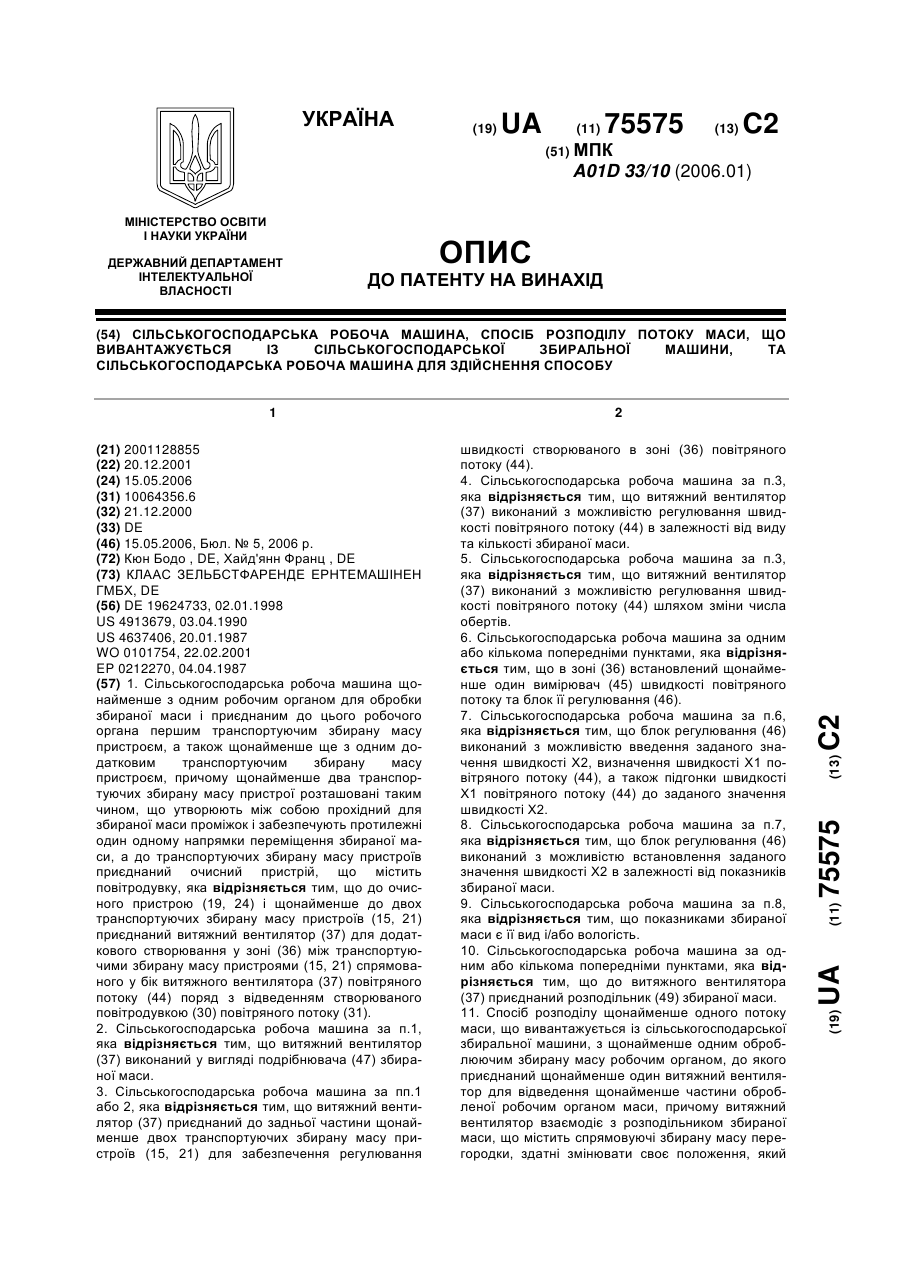
Реферат: Винахід стосується способу експлуатації сільськогосподарської робочої машини (1), до якої під'єднується начіпне знаряддя або робочий орган (3), який керується розподільним пристроєм (28), що розташований на робочій машині (1), причому під час під'єднання начіпного знаряддя або робочого органу (3) до робочої машини (1) за допомогою шинної системи (25) відбувається обмін даними між блоком керування (27) начіпного знаряддя або робочого органу (3) та розподільним пристроєм (28) робочої машини (1), та на основі даних, що їх отримано блоком керування (27) від розподільного пристрою (28), блок керування (27) здійснює перевірку того, чи є розподільний пристрій (28) автоматично конфігурованим. UA 115862 C2 (12) UA 115862 C2 UA 115862 C2 5 10 15 20 25 30 35 40 45 50 55 60 Даний винахід стосується способу експлуатації сільськогосподарської робочої машини відповідно до обмежувальної частини формули винаходу пункту формули винаходу 1, а також сільськогосподарської робочої машини відповідно до обмежувальної частини формули винаходу пункту формули винаходу 8. Із ЕР 1 378 863 А1 відомо про документацію функціонування та стану робочих органів, що їх можна під'єднувати до збиральної машини. До того ж, за допомогою пристрою для сприйняття робочих параметрів генерується сигнал про робочі параметри, що містить інформацію про роботу цього органу. Сигнал про робочі параметри надається до пристрою пам'яті, що зберігає цю інформацію, яка виходить з цього сигналу або відповідає йому. Пристрій пам'яті розташовано на робочому органі, а зчитування даних відбувається за допомогою зчитувального пристрою. Сигнали про робочі параметри, що їх було зчитано, передаються до бортового комп'ютера за допомогою шинної системи. Як робочі параметри виступають час експлуатації, площа, що її було оброблено, механічне навантаження силового агрегату, експлуатаційна швидкість, продуктивність, тип врожаю та властивості середовища, температура, опади або інформація щодо місця експлуатації, що його визначають за допомогою системи визначення місцезнаходження із використанням системи супутникового зв'язку. Зазвичай на сільськогосподарських робочих машинах використовуються різноманітні начіпні пристрої або робочі органи, що їх змінюють, наприклад, залежно від різних ступенів обробки або типу врожаю, що його збирають. Наприклад, заміна робочого органу може бути потрібна час від часу також протягом одного робочого дня, якщо змінюється тип культури, що потребує високих витрат часу, які пов'язані із визначенням та налаштуванням робочих параметрів під'єднаного робочого органу на приладі для керування робочої машини. Так, для можливості використання різноманітних функцій робочого органу після його заміни потрібне калібрування. Наприклад, якщо йдеться про функції налаштування висоти мотовила або налаштування висоти жниварки під час копіювання ґрунту, передбачене калібрування датчиків, що є потрібними для керування. До того ж, обслуговуючий персонал може невірно налаштувати функції робочого органу, через що оптимальне функціонування не буде забезпечене. Збереження інформації, що передбачене у пристрої пам'яті відповідно до ЕР 1 378 863 А1 не звільняє користувача самохідної робочої машини від необхідності калібрування та нового налаштування робочих параметрів начіпного знаряддя або робочого органу. Таким чином, задача даного винаходу є виготовлення способу експлуатації самохідної робочої машини, а також такої самохідної робочої машини для проведення такого способу, що дозволятиме зменшити час, який витрачається на монтаж або заміну начіпного знаряддя або робочого органу. Ця задача вирішується за допомогою визначальних ознак патентного домагання 1, а також незалежного патентного домагання 8. Відповідно до патентного домагання 1 пропонується, щоб під час під'єднання начіпного знаряддя або робочого органу до робочої машини відбувався процес обміну даними між керувальним блоком начіпного знаряддя або робочого органу та розподільним пристроєм робочої машини за допомогою шинної системи, та щоб у керувальному блоці на основі отриманих даних здійснювалася перевірка щодо того, чи є розподільний пристрій автоматично конфігурованим за допомогою керувального блока. Результат перевірки даних надає інформацію щодо того, чи є блок керування для під'єднаного начіпного знаряддя або робочого органу автоматично конфігурованим або має бути конфігурований уручну користувачем для забезпечення роботи начіпного знаряддя або робочого органу. Якщо встановлено, що блок керування є автоматично конфігурованим, за допомогою проведення автоматичної конфігурації можливе значне зменшення часу, що є потрібним під час заміни або монтажу начіпного знаряддя або робочого органу. Специфічні параметри налаштовуються автоматично, так само як збережені розрахункові показники. За допомогою цього засобу можна зменшити невірні налаштування або невірне керування. Якщо ж, навпаки, буде встановлено несумісність, користувача повідомляють про це для проведення конфігурації блока керування задля налаштування начіпного знаряддя або робочого органу уручну. При цьому при отриманні позитивного результату перевірки щодо можливості автоматичної конфігурації необхідно здійснювати запит за допомогою блока керування, що уможливлює ідентифікацію робочої машини. Таким чином, забезпечується неможливість небажаного передавання даних у випадку автоматичної конфігурації розподільного пристрою робочої машини за допомогою блока керування начіпного знаряддя або робочого органу, що може призвести до невірних налаштувань або несправностей. Надалі запитана інформація задля ідентифікації за допомогою керувального пристрою може бути оброблена для з'ясування того, чи є під'єднані начіпні знаряддя або під'єднаний робочий 1 UA 115862 C2 5 10 15 20 25 30 35 40 45 50 55 60 орган попередньо пов'язаними із робочою машиною. У такий спосіб можна автоматично з'ясувати, чи були начіпні знаряддя або робочий орган у минулому хоча б одноразово експлуатованими робочою машиною, тобто чи є робоча машина відомою для начіпного знаряддя або робочого органу. Зокрема при отриманні позитивного результату оцінювання керувального пристрою робочі дані, що зберігаються у ньому, передаються до розподільного пристрою, за допомогою якого начіпне знаряддя або робочий орган можуть бути автоматично відкаліброваними та може бути проведене налаштування для роботи начіпного знаряддя або робочого органу. Таким чином, забезпечується оптимальний режим роботи начіпного знаряддя або робочого органу, оскільки специфічні параметри для взаємодії відповідного начіпного знаряддя або робочого органу та робочої машини надаються та налаштовуються автоматично. Користувач у цьому випадку може бути повністю звільнений від проведення конфігурації. Розрахункові показники для роботи начіпного знаряддя або робочого органу автоматично налаштовуються у розподільному пристрої. До того ж, таким чином зменшується ймовірність невірних налаштувань та несправностей. Навпаки, при негативному результаті оцінювання блока керування основні робочі дані, що збережені в ньому, передаються до розподільного пристрою, за допомогою якого здійснюється калібрування начіпного знаряддя або робочого органу для першого використання та налаштування основних параметрів. Передавання основних робочих даних для начіпного знаряддя або робочого органу є вихідним пунктом для їхнього подальшого використання на робочій машині. Надалі після калібрування та основних налаштувань начіпного знаряддя або робочого органу уручну за допомогою розподільного пристрою робочої машини ці дані пересилаються на блок керування та зберігаються у ньому. Виходячи з цього, після калібрування та налаштування основних параметрів начіпного знаряддя або робочого органу уручну з розподільного пристрою на блок керування передається інформація для ідентифікації робочої машини та зберігається у ньому. У такий спосіб під час нового під'єднання начіпного пристрою або робочого органу до робочої машини можливе її розпізнавання блоком керування, що дає змогу повторного звертання до робочих даних, що зберігаються у блоці керування, для автоматичної конфігурації, тобто вони можуть бути передані з блоку керування до розподільного пристрою збиральної машини. Відповідно до незалежного патентного домагання 8 запропоновано самохідну робочу машину для здійснення способу, причому під час під'єднання начіпного пристрою або робочого органу до робочої машини здійснюється обмін даними між блоком керування начіпного знаряддя або робочого органу та розподільним пристроєм робочої машини за допомогою шинної системи та блоком керування на основі даних, що їх отримано від розподільного пристрою, перевіряє, чи є розподільний пристрій автоматично конфігурованим за допомогою блока керування. Переважно блок керування може використовуватися для керування повідними елементами на начіпному знарядді або робочому органі. Це можна зробити за допомогою реалізації таких функцій робочого органу як налаштування висоти мотовила, функція копіювання ґрунту, функція налаштування довжини складеної жниварки або інших подібних функцій блока керування. Так само це є дійсним для таких робочих органів як кукурудзяна приставка або кукурудзяний качанозбирач, а також на робочих машинах у вигляді тракторів, на таких начіпних знаряддях як обприскувачі, сівалки, валкувачі, косарикові механізми, фронтальні навантажувачі та ін. У найкращому вдосконаленні блок керування може мати зв'язок із датчиками, які розташовані на начіпному знарядді або робочому органі. Зокрема можна пов'язати струмопровідні дроти розподільного пристрою робочої машини та блока керування начіпного знаряддя або робочого органу за допомогою з'єднувальних елементів, які поряд із струмопровідними дротами додатково мають інтерфейс шини для з'єднання шинної системи робочої машини та начіпного знаряддя або робочого органу. За допомогою реалізації функції начіпного знаряддя або робочого органу у блоці керування функціональна складність шинного інтерфейсу між робочою машиною та начіпним знаряддям або робочим органом може бути зменшена. При цьому підвищується надійність з'єднання між з'єднувальними елементами. Наступна перевага полягає в тому, що функціональна складність модульного програмного забезпечення розподільного пристрою робочої машини зменшується, оскільки можна повністю або хоча б частково відмовитися від специфічних модулів програмного забезпечення начіпного знаряддя або робочого органу для розподільного пристрою. Даний винахід надалі детальніше розглядається за допомогою прикладу виконання, що його наведено у кресленнях. Його демонструють: 2 UA 115862 C2 5 10 15 20 25 30 35 40 45 50 55 60 Фіг. 1 схематична бічна проекція зернового комбайна; Фіг. 2 збільшений вигляд різального механізму зернового комбайна; Фіг. 3 блок-схема для наочної демонстрації способу; Даний винахід описано на прикладі зернового комбайна як сільськогосподарської робочої машини та під'єднаного до нього різального механізму як робочого органу. Як сільськогосподарська робоча машина може виступати, наприклад, силосозбиральний комбайн або трактор. Щодо робочих органів, окрім різноманітних варіантів різальних механізмів, може йтися про кукурудзяний качанозбирач, кукурудзяну приставку тощо. Як начіпні знаряддя можуть виступати валкувачі, перегрібачі, косарикові механізми, обприскувачі тощо. На фіг. 1 наведено зерновий комбайн 1 у бічній проекції, на подавальному стрижневі 2, що обертається у вертикальному напрямку, розташовано різальний механізм 3 як робочий орган. За допомогою подавального стрижня 2 різальний механізм 3 може бути налаштований на бажану висоту різання L. Різальний механізм 3 складається із жниварки 4 та мотовила 6, що закріплене на жниварці 4 за допомогою двох кронштейнів, які обертаються у вертикальній площині. Між жниваркою 4 та кронштейнами 5 за допомогою шарнірів з'єднано два гідравлічні циліндри 7, за допомогою яких кронштейни 5, обертаючись навколо точки шарніра 14, обертаються та у такий спосіб змінюють висоту мотовила 6. Додатково між кронштейнами 5 та мотовилом 6 розташовані два інших гідравлічних циліндри 13,за допомогою яких налаштовується положення мотовила у горизонтальному напрямку відносно жниварки 4, як наведено на фіг. 2. Мотовило 6, що йому надається рух за допомогою двигуна, що має вигляд гідравлічного двигуна 8, забезпечує безперервне приймання врожаю, а також його рівномірне транспортування через різальний механізм 3 та подавальний стрижень 2 до молотильного пристрою 9, зернового комбайна 1, який є відомим та з цієї причини не розглядається детально. Урожай нарізується ножовим брусом 10, що його розташовано на передньому боці жниварки 4, та далі нарізаний врожай за допомогою мотовила транспортується до подавального шнека, що його розташовано у жниварці 4, якому надається обертальний рух. Подавальний шнек 11 доставляє врожай до подавального стрижня 2. У подавальному стрижневі 2 працює похилий конвеєр 12, який передає врожай далі до молотильного пристрою 9. До молотильного пристрою 9 належить сепаратор 15, тут наведений у вигляді клавішного соломотрясу. Як альтернатива сепаратор 15 може мати вигляд роздільного ротора. Урожай, що надається із молотильного пристрою 9 та сепаратора 15, транспортується до очисного пристрою 16. Керування робочими агрегатами зернового комбайна 1 відбувається за допомогою розподільного пристрою 28, що зв'язується із робочими агрегатами за допомогою шинної системи 25 для забезпечення їхнього налаштування та контролю. Розподільний пристрій 28 включає індикаторний пристрій, пристрій для обробки даних та пристрій введення. Далі за допомогою з'єднувальних елементів 26 до шинної системи 25 під'єднується блок керування 27. Для забезпечення оптимального прийняття врожаю різальний механізм 3 має рухливу будову, причому можна регулювати висоту та розмір ухилу різального механізму 3. Урегулювання вертикальної висоти, тобто вирівнювання поздовжнього ухилу у напрямку руху, а також змінення ухилу різального механізму 3 відбувається залежно від актуального рівня ґрунту та слугує для забезпечення рівномірної висоти стерні урожаю, що його було зібрано. На фіг. 2 наведено вигляд різального механізму 3 зернового комбайна 1 відповідно до фіг. 1, включаючи датчики 21, 22, а також блок керування 27, оснащений накопичувачем даних 24 та мікропроцесором, який слугує для керування різальним механізмом 3. Актуальна висота Н мотовила 6 вимірюється датчиком кута оберту 21, що його розташовано у точці шарніра 14, який вимірює кут оберту α кронштейнів 5. Сигнал HHS, що його виробляє датчик кута оберту 21, є прямо пропорційним до висоти мотовила Н. Гідравлічному двигуну 8 надається рух за допомогою гідравлічної системи приводу 29. У гідравлічну систему приводу вмонтовано датчик тиску 22, який вимірює гідравлічний тиск, що змінюється залежно від моменту обертання мотовила М. Сигнал HDS, що його утворює датчик тиску 22, є пропорційним до навантаження, що діє на мотовило 6. Навантаження на мотовило 6 визначається дією сили тягнення FH, яка визначається моментом оберту мотовила М. Сигнали HHS та HDS надаються до блока керування 27, що з'єднаний із датчиком кута оберту 21 та датчиком тиску 22, який керує гідравлічною системою приводу 29. Далі можна передбачити наявність ковша різального механізму на різальному механізмові, що складається з рухливої та нерухливої частин для варіювання довжини жниварки під час обробки різноманітних видів врожаю. Із зміненням положення рухливої частини ковша відносно нерухливої частини слід перевірити, що мотовило не стикатиметься із ножовим брусом під час усіх можливих рухів. До того ж, відносне положення рухливої частини ковша відносно 3 UA 115862 C2 5 10 15 20 25 30 35 40 45 50 55 60 нерухливої частини необхідно вимірювати та регулювати найменше положення висоти мотовила з метою дотримання найменшої відстані між мотовилом та ножовим брусом. Із бічною стінкою рухливої частини ковша з'єднано керувальний ексцентрик, із яким взаємодіє датчик, що розташований на мотовилі, причому датчик впливає на електромагнітні клапани поршневого циліндра, що передбачений для підіймання та опускання мотовила. Керування рухливою частиною ковша також відбувається за допомогою керувального пристрою на різальному механізмі. Для правильного перебігу вищезазначених функцій необхідно проводити калібрування датчиків 21, 22, а також здійснювати нову конфігурацію під час змінення робочого органу. З метою звільнення користувача машини від цих завдань запропоновано спосіб експлуатації сільськогосподарської робочої машини, тут зернового комбайна 1, згідно з яким під час під'єднання різального механізму 3 до зернового комбайна 1 за допомогою шинної системи 25 відбувається обмін даними між блоком керування 27 різального механізму 3 та розподільним пристроєм 28 зернового комбайна 1. При цьому блок керування 27 перевіряє дані, що їх отримано від розподільного пристрою 28 для з'ясування, чи є робочий орган, що його під'єднано, автоматично конфігурованим. Зв'язок між різальним механізмом 3 або начіпним знаряддям та зерновим комбайном 1 (сільськогосподарською робочою машиною) відбувається за допомогою з'єднувальних елементів 26, що поряд із струмопровідними дротами охоплюють інтерфейс шини. Як шинна система 25 для різального механізму 3 та робочої машини 1 використовуються, наприклад, CAN, LIN, Flexray, Ethernet тощо. На фіг. 3 наведено блок-схему, за допомогою якої роз'яснено спосіб експлуатації сільськогосподарської робочої машини, яку можна під'єднувати до начіпних знарядь або робочих органів, на прикладі виконання у вигляді зернового комбайна 1. Вихідним пунктом способу є під'єднання робочого органу, тут різального механізму 3, до робочої машини, що має вигляд зернового комбайна 1. Тривалість процесу обладнання можна зменшити, якщо наявні дані про калібрування, а також про конфігурацію можна передати до розподільного пристрою 28 зернового комбайна 1. У першій стадії 50 здійснюється з'єднання шинних систем 25 різального механізму 3 із шинною системою 25 зернового комбайна 1. Це означає, що відбувається фізичне з'єднання робочого органу із шинною системою 25зернового комбайна 1, та через забезпечення струмом відбувається впровадження способу за допомогою блока керування 27. Блок керування різального механізму 3 та зернового комбайна 1 обмінюються даними за допомогою шинної системи 25. Під час першого запиту 51 перевіряється, чи різальний механізм 3 та зерновий комбайн 1 є сумісними, тобто, чи є розподільний пристрій 28 зернового комбайна 1 автоматично конфігуровним за допомогою блока керування 27 різального механізму 3. Перевіряється, чи є дані, що зберігаються у блоці керування 27, наприклад, дані щодо типу пристрою, серійного номера, часу роботи, робочої ширини та ваги робочого органу, гідравлічної конфігурації, а також збережені розрахункові показники для різального механізму 3, мотовила 6, жниварки 4 тощо такими, що їх можна передати до розподільного пристрою 28 за допомогою шинної системи 25. Якщо під час першого запиту 51 з'ясовується, що існує сумісність між різальним механізмом 3 та зерновим комбайном 1, під час подальшого другого запиту 53 перевіряється, чи різальний механізм 3 уже був коли-небудь підключений до зернового комбайна 1. Ця перевірка відбувається за допомогою запиту інформації від блока керування 27, що уможливлює ідентифікацію зернового комбайна 1. Якщо результат цього другого запиту 53 є позитивним, у другій стадії 54 знову проводиться обмін даними між блоком керування 27 та розподільним пристроєм 28 та дані про калібрування та конфігурацію для зернового комбайна, що має бути ідентифіковано, передаються за допомогою шинної системи 25 до розподільного пристрою 28. Спосіб закінчується успішним передаванням даних від блока керування 27 до розподільного пристрою 28. Якщо під час запиту 51 встановлено несумісність різального механізму 3 та зернового комбайна 1, тобто розподільний пристрій 28 зернового комбайна 1 не може бути автоматично сконфігурований за допомогою блока керування 27 різального механізму 3, відповідно до стадії 52 способу користувачеві надається відповідна вказівка. Відтак, користувач має здійснити необхідне калібрування різального механізму 3, а також конфігурацію розподільного пристрою 28 зернового комбайна 1 самостійно. У випадку, якщо під час першого запиту 51 було виявлено сумісність між різальним механізмом 3 та зерновим комбайном 1, але різальний механізм 3 уперше під'єднується до зернового комбайна 1, другий запит 53 має негативний результат. Проте, щоб все-таки 4 UA 115862 C2 5 10 15 прискорити процес устаткування, першою проміжною стадією 55 передбачено, що базова конфігурація, що її збережено у блоці керування 27, щодо типу пристрою, серійного номера, часу роботи, робочої ширини та ваги робочого органу, гідравлічної конфігурації тощо автоматично переноситься до розподільного пристрою 28. Поряд із першою проміжною стадією 55 існує друга проміжна стадія 56, відповідно до якої калібрування різального механізму 3, що є необхідним для початку експлуатації, проводиться користувачем уручну. Ця друга проміжна стадія 56 може бути автоматизована, якщо у розподільному пристрої 28 буде збережено алгоритм, що залежно від під'єднаного робочого органу автоматично здійснюватиме потрібні етапи калібрування. Після завершення калібрування або конфігурації, конфігурація, що її збережено у розподільному пристрої 28 для під'єднаного різального механізму 3, включаючи показники калібрування, буде перенесена до блока керування 27. Ці дані зберігатимуться поряд із інформацією для ідентифікації робочої машини, зернового комбайна 1. Це відбувається на третій стадії 57, яка проводиться користувачем уручну або може бути автоматизована, якщо, наприклад, користувач підтвердив процес калібрування та конфігурації уперше під'єднаного робочого органу через відповідне підтвердження запиту через розподільний пристрій 28. Перелік умовних позначень 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 21 22 24 25 26 27 28 50 51 52 53 54 55 56 57 Зерновий комбайн Подавальний стрижень Різальний механізм Жниварка Кронштейн мотовила Мотовило Гідравлічний циліндр Гідравлічний двигун Молотильний пристрій Ножовий брус Подавальний шнек Похилий конвеєр Гідравлічний циліндр Точка шарніра Сепаратор Очищення Датчик кута оберту Датчик тиску Накопичувач даних Шинна система З'єднувальний елемент Блок керування Розподільний пристрій Перша стадія Перший запит Стадія способу Другий запит Друга стадія Перша проміжна стадія Друга проміжна стадія Третя стадія Н L М HDS HHS 5 Висота мотовила Висота різання Момент обертання мотовила Сигнал Сигнал UA 115862 C2 ФОРМУЛА ВИНАХОДУ 5 10 15 20 25 30 35 40 45 50 55 1. Спосіб експлуатації сільськогосподарської робочої машини (1), до якої під'єднується начіпне знаряддя або робочий орган (3), який керується розподільним пристроєм (28), що розташований на робочій машині (1), який відрізняється тим, що під час під'єднання начіпного знаряддя або робочого органу (3) до робочої машини (1) за допомогою шинної системи (25) відбувається обмін даними між блоком керування (27) начіпного знаряддя або робочого органу (3) та розподільним пристроєм (28) робочої машини (1), та тим, що на основі даних, що їх отримано блоком керування (27) від розподільного пристрою (28), блок керування (27) здійснює перевірку того, чи є розподільний пристрій (28) автоматично конфігурованим. 2. Спосіб за п. 1, який відрізняється тим, що при позитивному результаті перевірки блоком керування (27) здійснюється запит до розподільного пристрою (28), який уможливлює ідентифікацію робочої машини (1). 3. Спосіб за п. 2, який відрізняється тим, що запитана інформація оцінюється блоком керування (27) із метою з'ясування того, чи було начіпне знаряддя або робочий орган (3) раніше під'єднано до робочої машини (1). 4. Спосіб за п. 3, який відрізняється тим, що при позитивному результаті оцінювання блоком керування (27) ці робочі дані передаються до розподільного пристрою (28), на основі чого здійснюється автоматичне калібрування та налаштування начіпного знаряддя або робочого органу (3). 5. Спосіб за п. 3, який відрізняється тим, що при негативному результаті оцінювання блоком керування (27) основні робочі дані, що зберігаються у ньому, передаються до розподільного пристрою (28), на основі чого здійснюється перше калібрування та основне налаштування начіпного знаряддя або робочого органу (3) для початку експлуатації. 6. Спосіб за п. 1, який відрізняється тим, що після калібрування та основного налаштування уручну начіпного знаряддя або робочого органу (3) ці дані передаються через розподільний пристрій (28) на блок керування (27) та зберігаються у ньому. 7. Спосіб за п. 6, який відрізняється тим, що після калібрування та основного налаштування уручну начіпного знаряддя або робочого органу (3) дані щодо ідентифікації робочої машини (1) передаються через розподільний пристрій (28) на блок керування (27) та зберігаються у ньому. 8. Сільськогосподарська робоча машина (1), до якої під'єднується начіпне знаряддя або робочий орган (3), який керується розподільним пристроєм (28), що розташований на робочій машині (1), оснащена для здійснення способу за пп. 1-7, яка відрізняється тим, що під час під'єднання начіпного знаряддя або робочого органу (3) до робочої машини (1) за допомогою шинної системи (25) відбувається обмін даними між блоком керування (27) начіпного знаряддя або робочого органу (3) та розподільним пристроєм (28) робочої машини (1), та тим, що на основі даних, що їх отримано блоком керування (27) від розподільного пристрою (28) блок керування (27) здійснює перевірку того, чи є розподільний пристрій (28) автоматично конфігурованим. 9. Робоча машина (1) за п. 8, якa відрізняється тим, що блок керування (27) виконано для керування виконувальними елементами (7, 8, 13) на начіпному знарядді або робочому органі (3). 10. Робоча машина (1) за одним із пп. 8 або 9, яка відрізняється тим, що блок керування (27) має зв'язок із датчиками (21, 22), що їх розташовано на начіпному знарядді або робочому органі (3). 11. Робоча машина (1) за одним із пп. 8-10, яка відрізняється тим, що струмопровідні дроти розподільного пристрою (28) робочої машини (1) та блока керування (27) начіпного знаряддя або робочого органу з'єднуються за допомогою з'єднувальних елементів (26), які поряд із струмопровідними дротами додатково мають інтерфейс шини для поєднання шинної системи (25) робочої машини (1) із начіпним знаряддям або робочим органом (3). 12. Робоча машина (1) за одним із пп. 8-11, яка відрізняється тим, що робоча машина виконана у вигляді зернового комбайна, силосозбирального комбайна або трактора. 13. Робоча машина (1) за одним із пп. 8-12, яка відрізняється тим, що робочий орган, що під'єднується до робочої машини, виконаний у вигляді жниварки, кукурудзяного качанозбирача, кукурудзяної приставки тощо. 14. Робоча машина (1) за одним із пп. 8-12, яка відрізняється тим, що начіпне знаряддя, що під'єднується до робочої машини, виконане у вигляді валкувача, сівалки, фронтального навантажувача тощо. 6 UA 115862 C2 7 UA 115862 C2 Комп’ютерна верстка О. Рябко Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 8
ДивитисяДодаткова інформація
Автори російськоюBurmann Dominik, Kohlhase Martin, Beschorn Udo
МПК / Мітки
МПК: B60D 1/62, A01B 63/00, G07C 5/08, A01B 59/00
Мітки: сільськогосподарська, спосіб, машина, робоча, машини, експлуатації, робочої, сільськогосподарсько
Код посилання
<a href="https://ua.patents.su/10-115862-sposib-ekspluataci-silskogospodarsko-robocho-mashini-ta-silskogospodarska-robocha-mashina.html" target="_blank" rel="follow" title="База патентів України">Спосіб експлуатації сільськогосподарської робочої машини та сільськогосподарська робоча машина</a>
Сільськогосподарська робоча машина, спосіб розподілу потоку маси, що вивантажується із сільськогосподарської збиральної машини, та сільськогосподарська робоча машина для здійснення способу
Номер патенту: 75575
Опубліковано: 15.05.2006
Автори: Кюн Бодо, Хайд'янн Франц
МПК: A01D 33/10
Мітки: здійснення, сільськогосподарська, сільськогосподарсько, потоку, машини, збиральної, вивантажується, робоча, способу, машина, маси, спосіб, розподілу
Формула / Реферат:
1. Сільськогосподарська робоча машина щонайменше з одним робочим органом для обробки збираної маси і приєднаним до цього робочого органа першим транспортуючим збирану масу пристроєм, а також щонайменше ще з одним додатковим транспортуючим збирану масу пристроєм, причому щонайменше два транспортуючих збирану масу пристрої розташовані таким чином, що утворюють між собою прохідний для збираної маси проміжок і забезпечують протилежні один одному...
Сільськогосподарська збиральна машина та спосіб експлуатації сільськогосподарської збиральної машини
Номер патенту: 100970
Опубліковано: 25.02.2013
Автори: Рамп Бенджамін І., Шейдлер Аллан Д.
МПК: A01D 41/12, A01D 43/10, A01F 12/00, A01F 7/00
Мітки: експлуатації, сільськогосподарська, спосіб, сільськогосподарсько, збиральна, збиральної, машина, машини
Формула / Реферат:
1. Сільськогосподарська збиральна машина, яка містить:основний силовий агрегат, виконаний з можливістю зчіплюватися принаймні з одним основним навантаженням, причому зазначене одне основне навантаження включає навантаження системи молотильного апарата; й допоміжний силовий агрегат, який є механічно незалежним від зазначеного основного силового агрегату, причому зазначений допоміжний силовий агрегат може зчіплюватися принаймні з однією...
Спосіб експлуатації системи допомоги водію для сільськогосподарської робочої машини
Номер патенту: 110860
Опубліковано: 25.02.2016
Автори: Неу Себастіан, Баумгартен Йоахім, Фітцнер Вернер
МПК: A01D 41/127
Мітки: сільськогосподарсько, допомоги, робочої, спосіб, експлуатації, машини, системі, водію
Формула / Реферат:
1. Спосіб експлуатації системи допомоги водію для оптимізації параметрів ефективності та/або критеріїв якості сільськогосподарської робочої машини, що включає деяку кількість робочих органів, зокрема зерновий комбайн, обчислювальний пристрій і принаймні один блок індикації, причому обчислювальний пристрій може переробляти дані, що надходять від машинних систем датчиків, дані від зовнішніх джерел і дані, що зберігаються в пам′яті...
Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини
Номер патенту: 106583
Опубліковано: 25.09.2014
Автори: Баумгартен Йоахім, Фітцнер Вернер, Неу Себастіан
МПК: A01F 12/16, A01D 41/127
Мітки: оптимізації, системі, ефективності, допомоги, спосіб, робочої, експлуатації, параметрів, сільськогосподарсько, водієві, машини
Формула / Реферат:
1. Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини, що включає робочі органи, зокрема зернозбирального комбайна, що містить обчислювальний пристрій та щонайменше один дисплей, при цьому обчислювальний пристрій виконано з можливістю обробки даних, отриманих від бортових датчиків машини, зовнішніх даних і даних, які можуть бути збережені в пам'яті обчислювального...
Спосіб експлуатації системи допомоги водію для оптимізації параметрів ефективності та/або критеріїв якості сільськогосподарської робочої машини
Номер патенту: 108817
Опубліковано: 10.06.2015
Автори: Баумгартен Йоахім, Фітцнер Вернер, Неу Себастіан
МПК: A01D 41/127
Мітки: якості, системі, сільськогосподарсько, ефективності, оптимізації, спосіб, параметрів, експлуатації, критеріїв, робочої, допомоги, водію, машини
Формула / Реферат:
1. Спосіб експлуатації системи допомоги водію для оптимізації параметрів ефективності та/або критеріїв якості сільськогосподарської робочої машини, що включає деяку кількість робочих органів, зокрема зернового комбайна, яка містить обчислювальний пристрій і принаймні один блок індикації, причому обчислювальний пристрій може переробляти дані, що надходять від машинних систем датчиків, дані від зовнішніх джерел і дані, що зберігаються в...
Попередній патент: Лікарська форма пірфенідону у вигляді капсул з фармацевтично прийнятними ексципієнтами
Наступний патент: Спосіб одержання феросплавів
Випадковий патент: Спосіб отримання гіпохлориту натрію для знешкодження суднових баластних вод і водню з морської води