Розвантажувально-роз’єднувальна установка рру-21
Номер патенту: 119580
Опубліковано: 25.09.2017
Автори: Мельник Василь Андрійович, РІДКЕВИЧ ВАСИЛЬ АНДРІЙОВИЧ, Божок Аркадій Михайлович

Формула / Реферат
Розвантажувально-роз'єднувальна установка РРУ-21, що включає майданчик для розвантаження рухомого складу лісовозних доріг і естакаду, обладнану приводними захоплювачами для роз'єднання пакетів дерев та поштучної подачі окремих стовбурів дерев на поздовжній транспортер для подальшої обробки, яка відрізняється тим, що приводні захоплювачі для роз'єднання пакетів дерев виконані рухомими у вертикальній площині, змонтовані на окремих рухомих вантажних візках з трособлоковою системою привода, яка розташована під естакадою, причому один із двох захоплювачів виконаний рухомим і в горизонтальній площині з приводом від гідрополіспаста, змонтованого на вантажному візку, а вантажний візок, розташований у відземковій частині пакета стовбурів дерев, обладнаний приводним рухомим у вертикальній площині додатковим (третім) захоплювачем та копіювальним пристроєм.
Текст
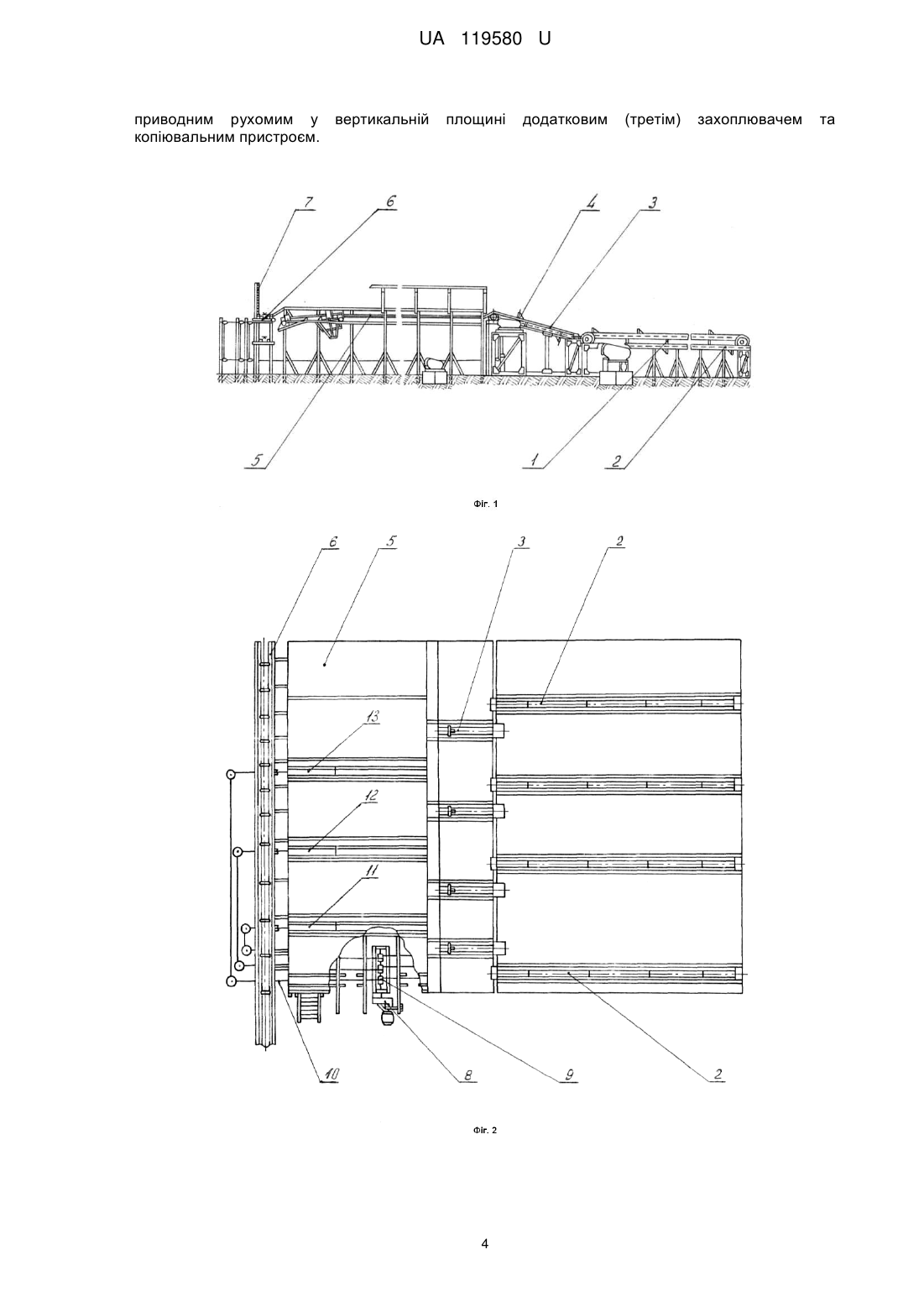
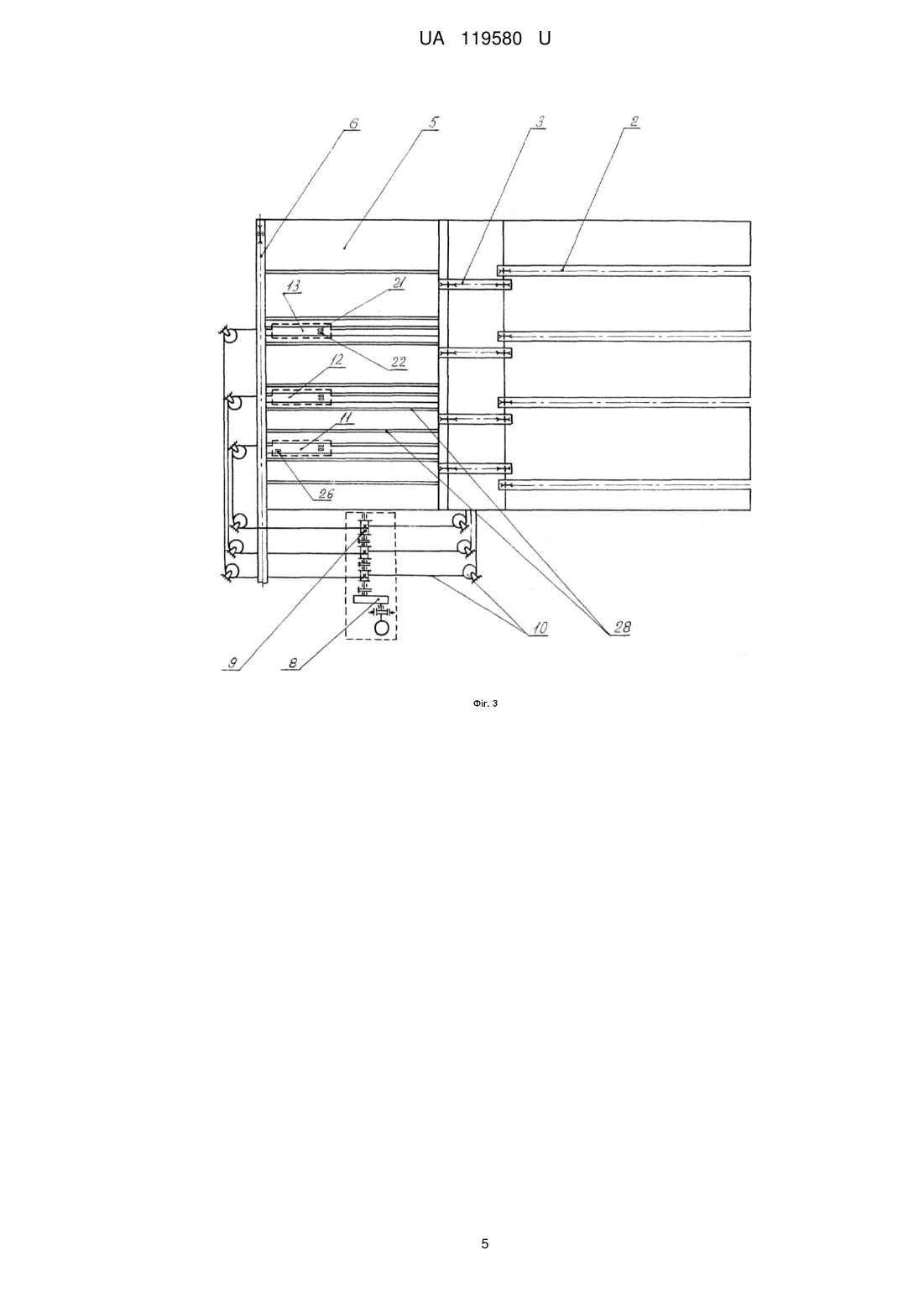
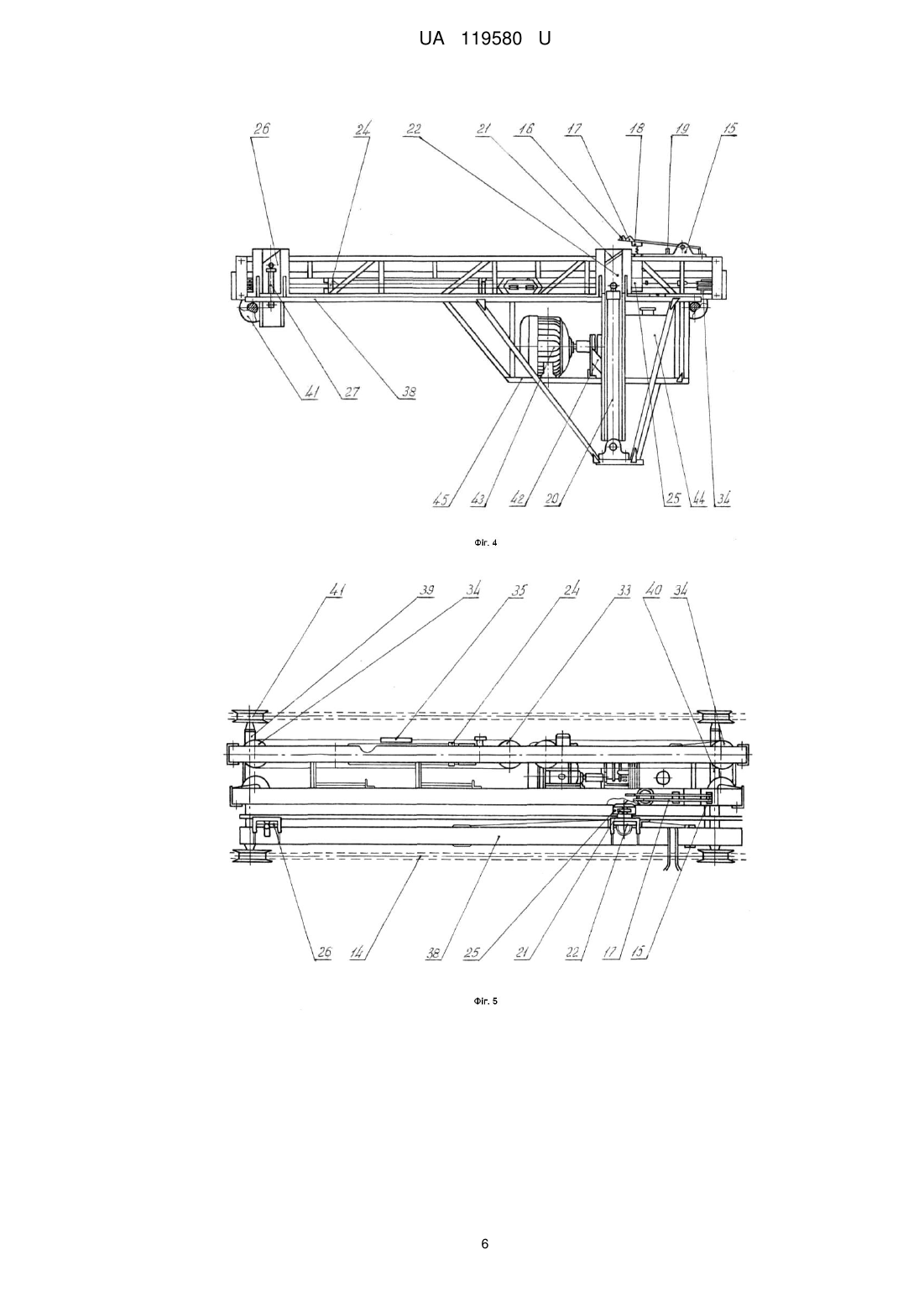
Реферат: Розвантажувально-роз'єднувальна установка РРУ-21 включає майданчик для розвантаження рухомого складу лісовозних доріг і естакаду, обладнану приводними захоплювачами для роз'єднання пакетів дерев та поштучної подачі окремих стовбурів дерев на поздовжній транспортер для подальшої обробки. Приводні захоплювачі для роз'єднання пакетів дерев виконані рухомими у вертикальній площині, змонтовані на окремих рухомих вантажних візках з трособлоковою системою привода, яка розташована під естакадою. Один із двох захоплювачів виконаний рухомим і в горизонтальній площині з приводом від гідрополіспаста, змонтованого на вантажному візку. Вантажний візок, розташований у відземковій частині пакета стовбурів дерев, обладнаний приводним рухомим у вертикальній площині додатковим (третім) захоплювачем та копіювальним пристроєм. UA 119580 U (12) UA 119580 U UA 119580 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до лісоскладського устаткування і може бути використана в лісовій промисловості та у військово-інженерній справі. Відомим аналогом є розвантажувально-роз'єднувальна установка, що містить майданчик для розвантаження рухомого складу лісовозних доріг (лісовози, вагони вузькоколійних залізничних доріг тощо) і естакаду для роз'єднання пакетів дерев та поштучної подачі окремих стовбурів дерев на поздовжній транспортер для їх подальшої обробки. Естакада для роз'єднання пакетів дерев обладнана двома однобарабанними приводними лебідками, двома трособлоковими системами з вантажними та натяжними блоками, двома лижами з човниковими захоплювачами та пусковою електроапаратурою з кнопковою станцією. Човникові захоплювачі змонтовані на лижах, на кожній з яких закріплені гаки для тросів, що паралельно розташовані на естакаді [див. кн. Оборудование лесных складов. Автори: А.И. Лешкевич, Д.К. Воєвода, В.В. Назаров. М.: Издательство "Лесная промышленность", 1975. Стор. 236, фиг. 93] Однак, недоліками аналога є: - низька ефективність установки через виконання операцій поштучної подачі окремих стовбурів дерев на поздовжній транспортер із застосуванням ручного керування човниковими захоплювачами за допомогою пульта кнопкової станції; - високі енергозатрати на переміщення лиж з човниковими захоплювачами по помосту естакади шляхом ковзання; - відсутність елементів автоматизації процесів роз'єднання пакетів дерев та окремих стовбурів при подаванні на поздовжній транспортер; - низька продуктивність установки через великий відсоток операцій, пов'язаних з втручанням оператора для їх виконання. Таким чином, аналог має низьку ефективність використання і малу продуктивність при виконанні роз'єднувальних операцій з пакетами дерев. В основу корисної моделі поставлена задача підвищення продуктивності праці і ефективності використання установки шляхом автоматизації розвантажувальнороз'єднувальних операцій на лісних складах. Поставлена задача вирішується тим, що приводні захоплювачі для роз'єднання пакетів дерев виконані рухомими у вертикальній площині, змонтовані на окремих рухомих вантажних візках з трособлоковою системою привода, яка розташована під естакадою, причому один із двох захоплювачів виконаний рухомим і в горизонтальній площині з приводом від гідрополіспаста, змонтованого на вантажному візку, а вантажний візок, розташований у відземковій частині пакета стовбурів дерев, обладнаний приводним рухомим у вертикальній площині додатковим (третім) захоплювачем та копіювальним пристроєм. Така конструкція розвантажувально-роз'єднувальної установки забезпечить ефективне і якісне роз'єднання пакетів дерев та поштучну подачу окремих стовбурів дерев на поздовжній транспортер для подальшої обробки, зменшить енергозатрати на переміщення дерев по помосту естакади, збільшить продуктивність праці завдяки автоматизації технологічного процесу. Корисна модель пояснюється кресленнями. На фіг. 1 показаний загальний вигляд розвантажувально-роз'єднувальної установки РРУ-21, вигляд збоку; на фіг. 2 - загальний вигляд установки РРУ-21, вигляд зверху; на фіг. 3 кінематична схема установки РРУ-21; на фіг. 4 - загальний вигляд вантажного (відземкового) візка, вигляд збоку; на фіг. 5 - загальний вигляд вантажного (відземкового) візка, вигляд зверху; на фіг. 6 - кінематична схема привода рухомого в горизонтальній площині захоплювача, установленого на всіх вантажних візках установки; на фіг. 7 - кінематична схема захоплювачів, змонтованих на вантажному (відземковому) візку, вигляд збоку; на фіг. 8 - кінематична схема захоплювачів, змонтованих на вантажному (відземковому) візку, вигляд зі сторони поздовжнього транспортера. Розвантажувально-роз'єднувальна установка РРУ-21 містить майданчик 1 для розвантаження возів дерев з рухомого складу лісовозних доріг (лісовози, вагони тощо), горизонтальні поперечні транспортери 2, нахилені поперечні транспортери 3, що обладнані кліщовинами 4, та естакаду 5, поряд з якою розташований поздовжній транспортер 6 зі стінкою безпечності 7. Під естакадою 5 прокладені рейкові колії 14, по яких рухаються вантажні візки 11, 12 і 13 за допомогою трособлокової системи 10 з приводом 8 і барабанами 9. На кожному з вантажних візків 11, 12 і 13 змонтовані приводні захоплювачі 21 з можливістю руху у вертикальній і горизонтальній площинах та приводні захоплювачі 22 з можливим рухом у вертикальній площині. Крім цього, вантажний візок 11 (відземковий), що рухається в зоні 1 UA 119580 U 5 10 15 20 25 30 35 40 45 50 55 розташування відземкової частини стовбурів дерев, обладнаний додатковим приводним захоплювачем 26, рухомим у вертикальній площині. Рух у вертикальній площині захоплювачів 21 і 22 забезпечується гідроциліндром 20, а захоплювача 26 - гідроциліндром 27. На нижніх кінцях захоплювачів 21 і 22 закріплені кронштейни 29 і 30. Приводний захоплювач 21 змонтований в каретці 25, яка рухається в горизонтальній площині за допомогою гідрополіспаста, що містить гідроциліндр 24 (хід штока "α"), рухому обойму 33 і дві нерухомих обойми 34, пов'язаних між собою трособлоковою системою 35. Рух обойми 33 здійснюється в напрямних 36. Рух каретки 25 із захоплювачем 21 в напрямних 37 обмежений кінцевими вимикачами 23 і 32. Рухомі вантажні візки 11, 12 і 13 включають рами 38, що закріплені на передній 39 і задній 40 осях з котками 41. Гідросистема привода захоплювачів складається з гідронасоса 42, електродвигуна 43, масляного бака 44 та золотникових розподільників, розташованих на рамах 45 кожного рухомого вантажного візка. Зубчаста рейка 46, яка закріплена на захоплювачі 21, утримується з ним в піднятому вертикальному положенні за допомогою храпового механізму 31, змонтованого на каретці 25. Вантажний (відземковий) візок 11 обладнаний копіювальним пристроєм 15, який містить два важільні копіювальні кулачки 16 і 17, спаровану пружину 18 та спарований двоконтактний кінцевий вимикач 19. Естакада 5 обладнана напрямними 28 для зменшення опору рухові стовбурів дерев в напрямку поздовжнього транспортера 6. Корисна модель працює наступним чином. На майданчик 1 розвантажують вози стовбурів дерев (з гілками або без них) з рухомого складу лісовозних доріг (лісовози, вагони тощо). Горизонтальними поперечними транспортерами 2 вози дерев переміщають до нахилених поперечних транспортерів 3, які кліщовинами 4 подають пакети дерев (по 4….6 стовбурів) на роз'єднувальну естакаду 5. В подальшому роз'єднання пакетів дерев і поштучна подача окремих стовбурів на поздовжній транспортер 6 виконується в автоматичному режимі із застосуванням кінцевих вимикачів. Після подачі пакета дерев на естакаду 5 включається привод 8 з барабанами 9 і за допомогою трособлокової системи 10 вантажні візки 11, 12 і 13 по рейкових коліях 14 одночасно подаються в напрямку місця розташування пакета до зустрічі копіювального пристрою 15, змонтованого на вантажному візку 11, з відземковою частиною першого (найближчого) стовбура дерева в пакеті. Копіювальні кулачки 16 і 17 знаходяться в піднятому положенні над поверхнею напрямних 28 естакади 5 під тиском спарованої пружини 18 і не діють на контакти спарованого кінцевого вимикача 19. В процесі руху вантажного візка 11 копіювальні кулачки 16 і 17 під тиском першого стовбура дерева утоплюються і замикають обидва контакти спарованого кінцевого вимикача 19, який в такому положенні не впливає на потік струму в електричному ланцюзі автоматичної системи управління технологічним процесом. Як тільки копіювальний кулачок 17 перестає контактувати з поверхнею першого стовбура дерева і попадає в проміжок між першим і другим (наступним) стовбуром, він (під дією спарованої пружини 18) розмикає один із контактів спарованого кінцевого вимикача 19 і знеструмлює електричний ланцюг привода 8 тросо-блокової системи 10 вантажних візків 11, 12 і 13, які зупиняються. Надалі включається гідроциліндр 20 привода захоплювачів 21 і 22, які одночасно вертикально піднімаються над поверхнею напрямних 28 естакади 5 в проміжку між першим і другим (поряд розташованим) стовбурами дерев і відокремлюють перший (крайній) стовбур від поряд розташованого (другого) в зоні дії першого вантажного (відземкового) візка 11. Захоплювачі 21 і 22 піднімаються над рівнем напрямних 28 естакади 5 на висоту "h", більшу діаметра відземка найкрупнішого стовбура, і діють на важіль кінцевого вимикача 23, який містить привод гідрополіспаста (гідроциліндр 24), що забезпечує рух каретки 25 із захоплювачем 21 та відземковою частиною стовбура дерева по напрямних 28 естакади 5 в горизонтальній площині на довжину "І". На початку руху захоплювача 21 кронштейн 29, яким обладнаний захоплювач 21, зміщається (втрачає контакт) з кронштейна 30, який закріплений на захоплювачі 22. 2 UA 119580 U 5 10 15 20 25 30 35 40 45 50 55 60 При цьому фіксація захоплювача 21 у піднятому (вертикальному) положенні забезпечується автоматичним включенням храпового механізму 31, розташованого на каретці 25 гідрополіспаста. Захоплювач 22 в цей час утримує на естакаді 5 частину пакета дерев, від якого відокремлена відземкова частина одного стовбура дерева. З початком горизонтального руху захоплювача 21 з відземковою частиною стовбура дерева автоматично (кінцевий вимикач 23) піднімається вертикально над естакадою 5 додатковий захоплювач 26 з приводом від гідроциліндра 27. Після переміщення стовбура на довжину "І" по вантажному візку 11 захоплювач 21 зупиняється (кінцевий вимикач 32) перед піднятим додатковим захоплювачем 26, з яким утримує від горизонтального руху по напрямних 28 естакади 5 відокремлену відземкову частину стовбура дерева. Далі включається в роботу другий вантажний візок 12, на якому піднімаються вертикально приводні захоплювачі 21, 22 і входять в проміжок між першим і другим стовбурами дерев, який утворився після переміщення відземкової частини першого стовбура по естакаді 5. Захоплювач 21, змонтований на каретці 25 з приводом від гідрополіспаста, переміщує стовбур дерева в його середній частині на таку ж довжину "І", що і на першому вантажному (відземковому) візку 11. Аналогічно виконуються операції по відокремленню вершинної частини стовбура дерева на третьому вантажному візку 13. В подальшому опускається додатковий захоплювач 26 на першому вантажному візку 11 і відокремлений стовбур дерева трьома вантажними візками 11, 12 і 13 за допомогою захоплювачів 21 по напрямних 28 естакади 5 подається на поздовжній транспортер 6. Затим захоплювачі 21 і 22 на всіх трьох вантажних візках 11, 12, 13 опускаються вертикально вниз (нижче напрямних 28), а захоплювачі 21 за допомогою гідрополіспастів здійснюють рух в горизонтальній площині доки кронштейни 29 і 30, якими обладнані захоплювачі 21 і 22, не увійдуть в контакт своїми опорними поверхнями. Опускання захоплювачів 21 на вантажних візках здійснюється автоматично за допомогою храпових механізмів 31 на каретках 25 гідрополіспастів. Вантажні візки 11, 12 і 13 повертаються в зону розташування пакета дерев, від зустрічі з яким спрацьовує копіювальний пристрій 15 на першому візку 11, а захоплювачі 21 і 22 розпочинають операцію відокремлення наступного стовбура від пакета дерев і весь технологічний процес повторюється. Керування всіма операціями по роз'єднанню пакета дерев і подаванню окремих стовбурів на поздовжній транспортер виконується в автоматичному режимі за допомогою кінцевих вимикачів, установлених на деталях і вузлах розвантажувально-роз'єднувальної установки. Використання корисної моделі у порівнянні з аналогом дасть можливість: - підвищити ефективність установки завдяки автоматизації процесу поштучної подачі окремих стовбурів дерев на поздовжній транспортер для подальшої обробки; - значно зменшити енергозатрати на переміщення пакетів та окремих стовбурів дерев по поверхні естакади внаслідок застосування напрямних та захоплювачів, змонтованих на вантажних візках з котками, що рухаються під естакадою по рейкових коліях шляхом кочення; - автоматизувати процеси роз'єднання возів дерев на менші за розмірами пакети (по 4…6 стовбурів), а надалі якісне поштучне відокремлення стовбурів дерев та центрування їх паралельно до поздовжньої осі транспортера завдяки використанню нерухомого і рухомого в горизонтальній площині захоплювачів на приводних вантажних візках установки; - підвищити продуктивність установки через автоматизацію технологічного процесу роз'єднання пакетів дерев та поштучної подачі їх на поздовжній транспортер. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Розвантажувально-роз'єднувальна установка РРУ-21, що включає майданчик для розвантаження рухомого складу лісовозних доріг і естакаду, обладнану приводними захоплювачами для роз'єднання пакетів дерев та поштучної подачі окремих стовбурів дерев на поздовжній транспортер для подальшої обробки, яка відрізняється тим, що приводні захоплювачі для роз'єднання пакетів дерев виконані рухомими у вертикальній площині, змонтовані на окремих рухомих вантажних візках з трособлоковою системою привода, яка розташована під естакадою, причому один із двох захоплювачів виконаний рухомим і в горизонтальній площині з приводом від гідрополіспаста, змонтованого на вантажному візку, а вантажний візок, розташований у відземковій частині пакета стовбурів дерев, обладнаний 3 UA 119580 U приводним рухомим у вертикальній копіювальним пристроєм. площині 4 додатковим (третім) захоплювачем та UA 119580 U 5 UA 119580 U 6 UA 119580 U 7 UA 119580 U Комп’ютерна верстка О. Гергіль Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 8
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B66C 1/00, A01G 23/081
Мітки: розвантажувально-роз'єднувальна, рру-21, установка
Код посилання
<a href="https://ua.patents.su/10-119580-rozvantazhuvalno-rozehdnuvalna-ustanovka-rru-21.html" target="_blank" rel="follow" title="База патентів України">Розвантажувально-роз’єднувальна установка рру-21</a>
Розвантажувально-зливний клапан
Номер патенту: 21420
Опубліковано: 15.03.2007
Автори: Корчак Олена Сергіївна, Шинкаренко Олег Михайлович
МПК: F16K 17/00
Мітки: клапан, розвантажувально-зливний
Формула / Реферат:
Розвантажувально-зливний клапан, що містить розвантажувальний клапан, напрямний стакан, шток, плунжер клапана, головну запірну фаску, упорну гайку, систему отворів, який відрізняється тим, що плунжер клапана оснащено конічною юбкою, дроселюючий канал виконано конічним з вершиною конуса, яку обернено у напрямку руху потоку, а вершину конуса юбки обернено проти напрямку потоку рідини, при цьому канали усередині плунжера виконано таким чином,...
Сортувальна установка для лісоматеріалів
Номер патенту: 109674
Опубліковано: 25.08.2016
Автори: Божок Аркадій Михайлович, Мельник Василь Андрійович, РІДКЕВИЧ ВАСИЛЬ АНДРІЙОВИЧ
МПК: B07C 5/14
Мітки: сортувальна, установка, лісоматеріалів
Формула / Реферат:
Сортувальна установка для лісоматеріалів, що містить тример (установка для поперечного розкряжовування стовбурів дерев), похилий поперечний транспортер, вертикальний елеватор, похилі напрямні лати, виносні поздовжні ланцюгові транспортери, рольганги (роликові транспортери), нагромаджувачі і сортиментні візки, яка відрізняється тим, що вертикальний елеватор обладнаний поворотними у вертикальній площині колисками, хвостовики яких шарнірно...
Канатна установка для трелювання деревини
Номер патенту: 45009
Опубліковано: 26.10.2009
Автор: Кий Андрій Володимирович
МПК: B61B 7/00
Мітки: установка, трелювання, деревини, канатна
Формула / Реферат:
Канатна установка для трелювання деревини, що містить самохідне шасі, яке несе щоглу, канати, систему блоків, барабани для канату, яка відрізняється тим, що з метою спрощення конструкції та підвищення надійності в роботі, розширення експлуатаційних можливостей, щогла виконана похилою та з'єднана шарнірно з огородженням шасі, а барабани тягово-несучого каната з плитою, на якій вони змонтовані, є знімними, причому основа щогли виконана з...
Спосіб моніторингу густоти деревостанів сосни
Номер патенту: 93754
Опубліковано: 10.10.2014
Автори: Гриб Ірина Володимирівна, Михавків Михайло Стефанович, Гриб Володимир Макарович
МПК: A01G 23/00
Мітки: моніторингу, спосіб, сосни, густоті, деревостанів
Формула / Реферат:
Спосіб моніторингу густоти деревостанів сосни, що включає вимірювання висоти та діаметра модельних дерев на рівні перших мертвих та перших живих сучків, а також по середині зон сучкуватості, з подальшим розрахунком об'ємів зон стовбурів в залежності від сучкуватості, а по співвідношенню цих зон судять про якість деревини, який відрізняється тим, що додатково проводять виміри: діаметрів найдовших гілок у місті прикріплення та кут уростання до...
Спосіб оцінки ефективності лікування хворих з хронічними захворюваннями гастродуоденальної зони методом розвантажувально-дієтичної терапії
Номер патенту: 46494
Опубліковано: 25.12.2009
Автори: Бакалюк Олег Йосипович, Кузів Петро Петрович
МПК: A61B 5/00
Мітки: спосіб, гастродуоденальної, розвантажувально-дієтичної, зони, оцінки, хронічними, лікування, терапії, методом, хворих, ефективності, захворюваннями
Формула / Реферат:
Спосіб оцінки ефективності лікування хворих з хронічними захворюваннями гастродуоденальної зони методом розвантажувально-дієтичної терапії (дозованого лікувального голодування), що ґрунтується на оцінюванні динаміки скарг пацієнта та даних об'єктивного обстеження (розміри ураженого органа, його болючість при пальпації), який відрізняється тим, що додатково проводять термографію передньої поверхні тулуба з реєстрацією величини інфрачервоного...
Попередній патент: Спосіб збільшення статевого члена
Наступний патент: Спосіб поверхневого поливу
Випадковий патент: Установка біологічної очистки води "каскад"