Спосіб визначення фазових коефіцієнтів
Формула / Реферат
Спосіб визначення фазових коефіцієнтів, оснований на скануванні одночасно трьома гостроспрямованими лазерними променями зони перехрестя з точки над його геометричним центром конусним видом розгортки, причому оптична вісь одного з положень розгортки першого променя вибирається так, щоб він описував коло на проїжджій частині перехрестя в області стоп-ліній всіх його підходів, а друге положення розгортки відповідало відхиленню лазерного променя, при якому радіус другого концентричного кола на поверхні проїзної частини зменшується на певну задану величину, при цьому зміна положень розгортки здійснюється з високою швидкістю по черзі через кожен період сканування, а другий промінь розгортки формується зі зміщенням на третину періоду по колу розгортки та зі зміною кута нахилу оптичної осі променя, як і першого, по черзі у реперній точці через кожен період сканування так, щоб радіус другого концентричного кола на вході першої контрольованої зони зменшувався на певну задану величину, третій оптичний промінь лазерної розгортки формується зі зміщенням відносно до другого ще на третину періоду по колу розгортки, а кути нахилу оптичних осей третього променя, як і двох перших, змінюють по черзі у реперній точці через кожен період сканування так, щоб радіус другого концентричного кола на вході другої контрольованої зони зменшувався на певну задану величину, при цьому відстань між вхідною і вихідною межами другої контрольованої зони вибирають за умови, щоб вона перевищувала найбільш можливу чергу транспортних засобів, яка може збиратися по одній із смуг руху на сигнал світлофора, що забороняє дорожній рух, подальшому прийомі відображених оптичних сигналів фотоприймачами і надалі перетворенні цих сигналів в імпульсно-числові коди, за якими визначаються швидкість, тип та час пересування транспортних засобів на входах і виходах обох контрольованих зон, напрямки їх руху по смугах, кількість транспортних засобів у черзі у фізичних та приведених одиницях, значення зупиночного шляху різного типу транспортних засобів, час пересування черги зони стоп-ліній по всіх смугах руху упродовж окремих тактів одного циклу світлофорного регулювання, а потім наявність транспортних засобів по окремих смугах в першій контрольованій зоні та в зоні самого перехрестя на момент початку проміжного такту, а момент закінчення проміжного такту формується за моментами, коли останній транспортний засіб, що знаходився в зоні перехрестя, почне перетинати своїм переднім бампером одну з ліній сканування першого променя по смугах руху на виході з перехрестя, а тривалість циклу регулювання визначається як сукупність основних та проміжних тактів всіх фаз, який відрізняється тим, що на входах і виходах контрольованих зон визначають прискорення (уповільнення) кожного транспортного засобу і по швидкості та часу перетинання кордонів контрольованих зон спочатку їх передніми, а потім задніми бамперами послідовно визначають довжину, тип транспортного засобу, його зупиночний шлях, час дії основних та проміжних тактів з урахуванням часу проїзду дальніх конфліктних точок тих транспортних засобів, які на момент початку проміжного такту здійснювали перетин вхідних ліній сканування першої контрольованої зони.
Текст
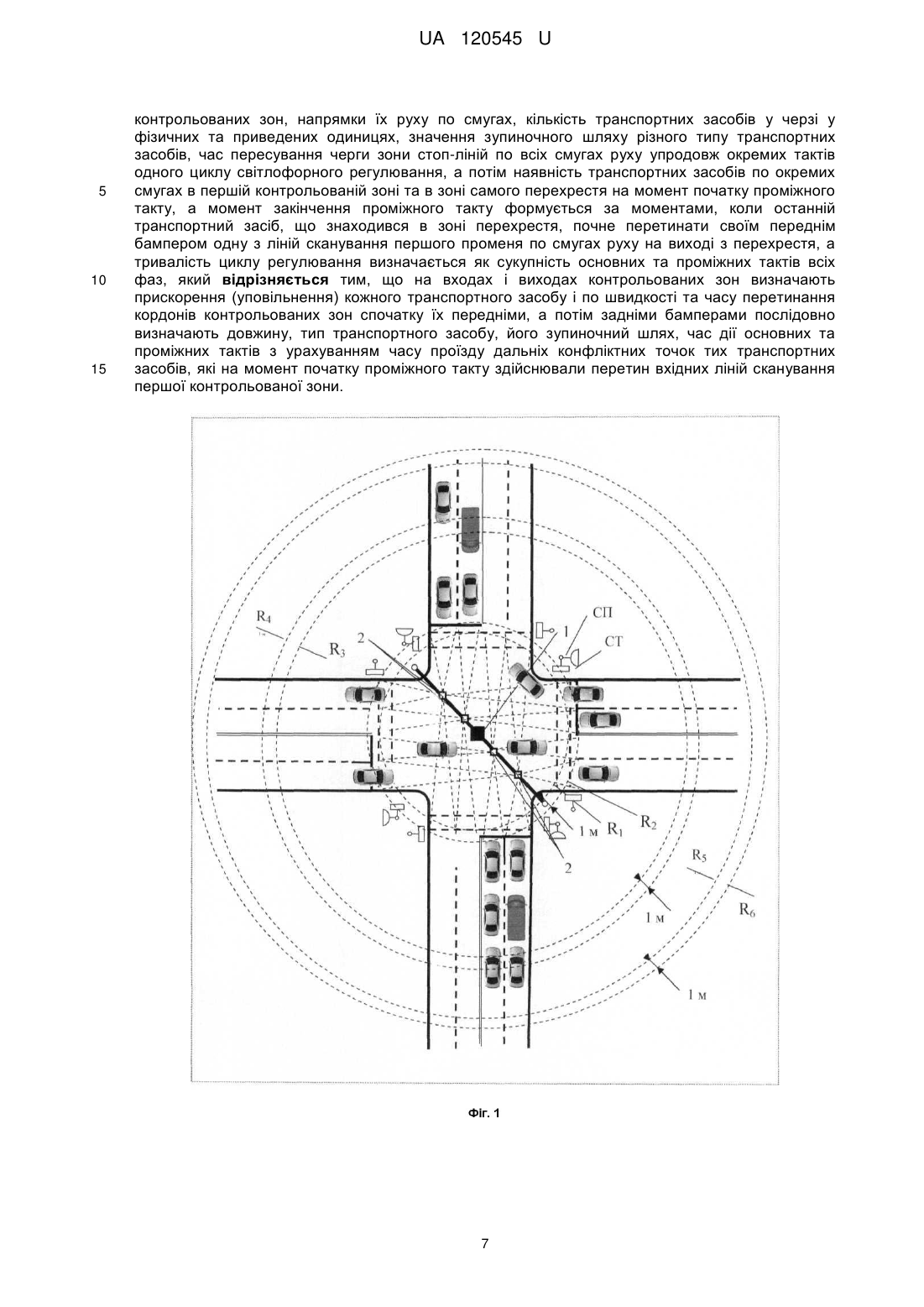
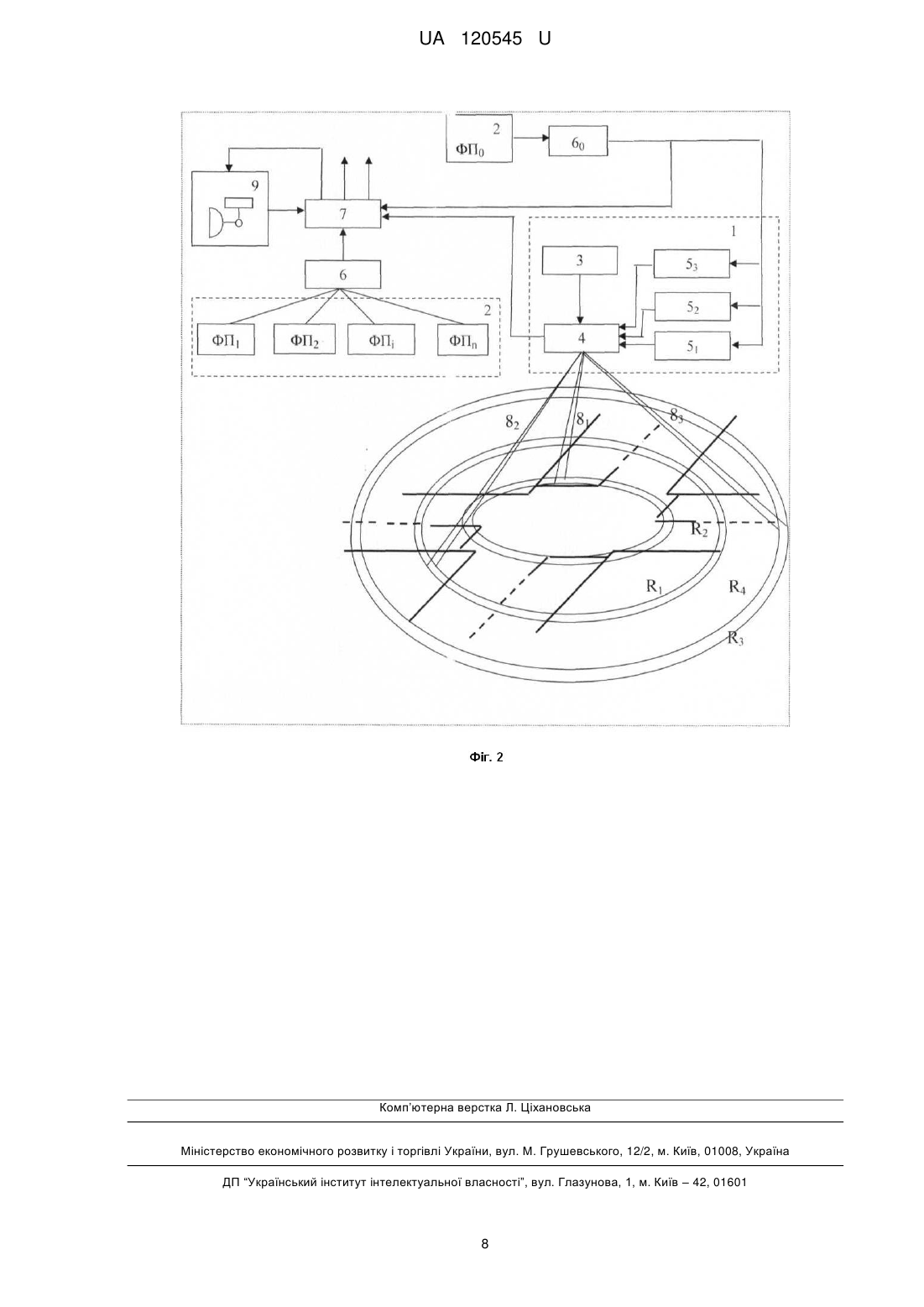
Реферат: Спосіб визначення фазових коефіцієнтів оснований на скануванні одночасно трьома гостроспрямованими лазерними променями зони перехрестя з точки над його геометричним центром конусним видом розгортки, причому оптична вісь одного з положень розгортки першого променя вибирається так, щоб він описував коло на проїжджій частині перехрестя в області стоп-ліній всіх його підходів, а друге положення розгортки відповідало відхиленню лазерного променя, при якому радіус другого концентричного кола на поверхні проїзної частини зменшується на певну задану величину, при цьому зміна положень розгортки здійснюється з високою швидкістю по черзі через кожен період сканування, а другий промінь розгортки формується зі зміщенням на третину періоду по колу розгортки та зі зміною кута нахилу оптичної осі променя, як і першого, по черзі у реперній точці через кожен період сканування так, щоб радіус другого концентричного кола на вході першої контрольованої зони зменшувався на певну задану величину, третій оптичний промінь лазерної розгортки формується зі зміщенням відносно до другого ще на третину періоду по колу розгортки, а кути нахилу оптичних осей третього променя, як і двох перших, змінюють по черзі у реперній точці через кожен період сканування так, щоб радіус другого концентричного кола на вході другої контрольованої зони зменшувався на певну задану величину, при цьому відстань між вхідною і вихідною межами другої контрольованої зони вибирають за умови, щоб вона перевищувала найбільш можливу чергу транспортних засобів, яка може збиратися по одній із смуг руху на сигнал світлофора, що забороняє дорожній рух, подальшому прийомі відображених оптичних сигналів фотоприймачами і надалі перетворенні цих сигналів в імпульсно-числові коди, за якими визначаються швидкість, тип та час пересування транспортних засобів на входах і виходах обох контрольованих зон, напрямки їх руху по смугах, кількість транспортних засобів у черзі у фізичних та приведених одиницях, значення зупиночного шляху різного типу транспортних засобів, час пересування черги зони стоп-ліній по всіх смугах руху упродовж окремих тактів одного циклу світлофорного регулювання, а потім наявність транспортних засобів по окремих смугах в першій контрольованій зоні та в зоні самого перехрестя на момент початку проміжного такту, а момент закінчення проміжного такту формується за моментами, коли останній транспортний засіб, що знаходився в зоні перехрестя, почне перетинати своїм переднім бампером одну з ліній сканування першого променя по смугах руху на виході з перехрестя, а тривалість циклу регулювання визначається як сукупність основних та проміжних тактів всіх UA 120545 U (12) UA 120545 U фаз, причому на входах і виходах контрольованих зон визначають прискорення (уповільнення) кожного транспортного засобу і по швидкості та часу перетинання кордонів контрольованих зон спочатку їх передніми, а потім задніми бамперами послідовно визначають довжину, тип транспортного засобу, його зупиночний шлях, час дії основних та проміжних тактів з урахуванням часу проїзду дальніх конфліктних точок тих транспортних засобів, які на момент початку проміжного такту здійснювали перетин вхідних ліній сканування першої контрольованої зони. UA 120545 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до систем регулювання дорожнього руху (ДР) і може бути використана при розробці агрегатної системи засобів управління ДР, при розробці АСУ-ДР, в системах інформаційного забезпечення завантаження перехресть ВДМ, а також для підвищення ефективності управління рухом транспорту на регульованих перехрестях. Цей спосіб може бути використаний для одночасного визначення основних параметрів транспортних потоків (ТП): моменту проїзду транспортним засобом (ТЗ) контрольованої зони (КЗ) та перехрестя в цілому, швидкості, прискорення (уповільнення), типу і напрямку руху ТЗ, їх інтенсивності руху по кожній смузі за будь-який проміжок часу, інтервалів рухів між ТЗ, елементів та циклу регулювання, а також потоків насичення та фазових коефіцієнтів по кожній смузі регульованого перехрестя. Відомий спосіб визначення фазових коефіцієнтів регульованого перехрестя оснований на скануванні двома гостроспрямованими лазерними променями зони перехрестя з точки над його геометричним центром конусним видом розгортки, причому оптична вісь одного з положень розгортки першого променя вибирається так, щоб він описував коло на проїжджій частині перехрестя в області стоп-ліній всіх його підходів, а друге положення розгортки відповідало відхиленню лазерного променя, при якому радіус другого концентричного кола на поверхні проїзної частини зменшується на певну задану величину, при цьому зміна положень розгортки здійснюється з високою швидкістю по черзі через кожен період сканування. Другий оптичний промінь лазерної розгортки формується у одній площині з першим, але зі зміщенням на 180° по колу розгортки і формує вхідну межу КЗ. Цей промінь, як і перший, за допомогою відповідного дискретного сканістора на кожному наступному періоді сканування змінює одну оптичну вісь розгортки (з радіусом кола R 3 на проїжджій частині перехрестя) на іншу (з радіусом кола R4) і формує два концентричних кола з різницею радіусів R3-R4=1 м· Оптичні сигнали, що відбиваються від транспортних засобів на підходах та виходах перехрестя, приймаються відповідними фотоприймачами і перетворюються в імпульсночисловий код, за яким обчислюються швидкість і тип ТЗ, інтенсивність і інтервали між ТЗ, що дозволяє послідовно визначити реальні значення коефіцієнтів приведення до легкового автомобіля, кількість ТЗ у черзі у приведених одиницях, час пересування черги, починаючи з моменту перетинання стоп-лінії переднім бампером першого в черзі ТЗ і закінчуючи моментом проходження над стоп-лінією заднього бампера останнього в черзі автомобіля та значення потоків насичення і фазових коефіцієнтів по всіх смугах руху упродовж одного циклу регулювання (Опис до патенту на винахід № 112180 від 10.08.2016 р., бюл. № 15/2016). Цей спосіб є найбільш близьким до способу, що заявляється, і тому обраний в якості найближчого аналога. Недоліком цього способу є невисока точність визначення окремих параметрів руху ТЗ, тривалості елементів та циклу СС і в кінцевому результаті фазових коефіцієнтів окремих напрямків руху регульованого перехрестя. Пов'язано це з тим, що існуючий спосіб не враховує режими прискорення та уповільнення ТЗ при русі через КЗ та зону перехрестя, що впливає на точність визначення довжини ТЗ, їх типу, коефіцієнтів приведення до легкового автомобіля, потоків насичення по смугах руху, зупиночного шляху (ЗШ) різного типу ТЗ, що в кінцевому рахунку знижує точність визначення оптимальних параметрів циклу світлофорного регулювання, фазових коефіцієнтів та ефективність управління рухом транспорту на регульованих перехрестях. В основу запропонованого способу поставлена задача підвищення точності визначення фазових коефіцієнтів, тривалості тактів та самого циклу світлофорного регулювання. Поставлена задача вирішується тим, що в основу запропонованого способу поставлено конусне покрокове сканування одночасно трьома вузькоспрямованими лазерними променями інфрачервоного діапазону всіх підходів і виходів перехрестя, що дає можливість сформувати вхідні і вихідні межі двох КЗ та забезпечити визначення комплексу вищевказаних параметрів ТП по кожній смузі руху, основні, проміжні такти, цикл СР та фазові коефіцієнти в залежності від результатів сканування з урахуванням режимів прискорення та уповільнення ТЗ в зонах впливу всього перехрестя. На фіг. 1 представлена схема, яка розкриває основні відмінні особливості запропонованого способу і послідовність його дій. Відповідно до запропонованого способу, розгортка лазерного променя здійснюється скануючим блоком 1, який розташовується над перехрестям на спеціальному кронштейні в точці, що відповідає геометричному центру перехрестя. У скануючому блоці, залежно від висоти його розміщення, одну з оптичних осей розгортки підбирають так, щоб перший лазерний промінь описував конусну поверхню з колом на проїжджій частині перехрестя (R 1) в області "стоп-ліній" всіх його підходів. До складу скануючого блока входить оптичний відхиляючий 1 UA 120545 U 5 10 15 20 25 пристрій (дискретний сканістор), який забезпечує відхилення осі першого лазерного променя в необхідне друге положення, при якому радіус кола (R 2) на поверхні проїзної частини зменшується на задану величину (наприклад, на 1 м). Таким чином, блок сканування на кожному наступному періоді сканування змінює розгортку першого лазерного променя з однієї оптичної осі на іншу та описує в зоні стоп-ліній на поверхні перехрестя два концентричні кола з різницею радіусів (R2-R1=1 м) та формує вихідну межу КЗ. Другий оптичний промінь лазерної розгортки формується зі зміщенням на 120 по колу розгортки (див. фіг. 2) і формує вхідну межу першої КЗ. Цей промінь, як і перший, за допомогою відповідного дискретного сканістора 5 2 на кожномунаступному періоді сканування змінює одну оптичну вісь розгортки (з радіусом кола R3 на проїжджій частині перехрестя) на іншу (з радіусом кола R 4) і формує два концентричних кола з різницею радіусів R4-R3=1 м. Третій оптичний промінь лазерної розгортки формується зі зміщенням відносно до другого ще на 120° по колу розгортки (див. фіг. 2) і формує вхідну межу другої КЗ. Цей промінь, як і обидва інші, за допомогою відповідного дискретного сканістора 5 3 на кожному наступному періоді сканування змінює одну оптичну вісь розгортки (з радіусом кола R 5 на проїжджій частині перехрестя) на іншу (з радіусом кола R6) і формує два концентричних кола також з різницею радіусів R6-R5=1 м. Оптичні фотоприймачі 2 (ФП, ) в процесі розгортки лазерних променів 8 1, 82 та 83 по одному з кіл на входах і виходах КЗ послідовно сприймають сигнали, відбиті від ТЗ, що рухаються по різним смугам руху як на підходах, так і на виходах перехрестя. Фіксацію ТЗ, що в'їжджають в обидві КЗ, здійснюють по їх передніх бамперах при пересіченні одного з кіл (R6 або R4), при цьому завдяки періодичному скануванню зі зміною оптичної осі лазерного променя (з радіуса R3 на R4 і з R5 на R6 та навпаки) визначаються моменти в'їзду, кількість і послідовність ТЗ, що реально в'їхали в КЗ по кожній смузі руху за період вимірювань. Швидкість ТЗ, що послідовно своїм переднім бампером перетинають лінії сканування R4 та ' ' R3 (або R6 та R3) визначають на дистанції 1 м і фіксують як значення V1 та V2 . Потім 30 ' ' фіксуються швидкості V1' , та V2' цих же ТЗ при перетині відповідних ліній сканування (R4 та R3 або R6 та R5) їх задніми бамперами. Довжина l ТЗ ТЗ з урахуванням уповільнення a ' ' V1 V1' , l ТЗ (1) де t ТЗ - час проїзду ТЗ лінії сканування R3 (або R5), відповідно, спочатку переднім, а потім заднім бампером, визначається як 35 (2) l ТЗ a t 2 , ТЗ 40 45 За значенням l ТЗ у подальшому визначається тип ТЗ, який по кожній смузі руху перетинає вхідні кордони кожної КЗ. Радіус R3, що формує вхідну межу першої КЗ, вибирають за такої умови, щоб відстань між R3 та R1 відповідала (з урахуванням реальної відстані, на якій водій реагує на зміну сигналу світлофора) максимальному з можливих зупиночному шляху (ЗШ) різного типу ТЗ, що перетинають вхідну межу першої КЗ з максимально дозволеною швидкістю (60 км./год.). Наявність подвійного сканування (R3, R4) на вході першої КЗ дає можливість точно визначити тип ТЗ, склад ТП та кількість ТЗ mj у черзі по кожній j-й смузі руху на підходах до перехрестя на момент зміни сигналу світлофора на зелений або на момент початку руху перших у черзі ТЗ. Крім того, це дозволяє ви значити швидкість та уповільнення ТЗ на вході в першу КЗ на момент зміни сигналу світлофора з зеленого на жовтий і по швидкості та типу ТЗ розрахувати його ЗШ та в кінцевому рахунку по уповільненню на входах в першу та другу КЗ прийняти рішення про завершення ПТ 50 l зш lрк lгш V t рк V2 , 2g f (3) 2 UA 120545 U 5 10 15 20 25 30 де lрк - шлях, що пройде ТЗ за час реакції водія t рк на зміну сигналів світлофору; lгш гальмовий шлях; V - швидкість ТЗ на вході в КЗ; g - прискорення вільного падіння; коефіцієнт подовжнього зчеплення колеса з поверхнею дороги; f - коефіцієнт кочення колеса; - величина подовжнього похилу. Подвійне сканування першим променем (R1, R2) в зоні стоп-ліній (на виході з першої та другої КЗ) дає змогу визначити швидкість, прискорення, тип, точний час та кількість ТЗ, які покинули КЗ по кожній зі смуг руху на зелений сигнал світлофора, а значить, визначити наявність ТЗ по окремих смугах в КЗ на момент зміни зеленого сигналу світлофора на жовтий. За результатами сканування першим променем також визначають кількість та тип ТЗ по кожній смузі, що не встигли (не змогли) покинути зону самого перехрестя на зелений сигнал світлофора, тобто не здійснили перетинання зони сканування (R1, R2) по смугах руху на виході з перехрестя. Це можливо у випадку, коли лівоповоротні ТЗ в зоні перехрестя очікують проїзду прямого зустрічного транспорту, а правоповоротні ТЗ - завершення переходу пішоходів. Інформація про довжину, тип та кількість ТЗ в зоні перехрестя на момент початку дії ПТ дає можливість чітко визначити момент, коли всі ТЗ попередньої фази руху звільнять зону перехрестя для початку нової фази. Це пропонується здійснювати за моментами, коли останній ТЗ, що знаходився в зоні перехрестя, почне перетинати своїм переднім бампером одну з ліній сканування (наприклад, R1) по смугах руху на виході з перехрестя. Це дає гарантію, що останній ТЗ досяг або минув дальню конфліктну точку (ДКТ) цього ПТ і, при умові наявності інформації про його довжину, практично вже залишив зону перехрестя. Момент перетинання своїм переднім бампером лінії сканування з радіусом R 1 приймається як кінець ПТ цієї фази, але за умови перевірки можливості появи на вході в першу КЗ нового ТЗ, зупиночний шлях якого перевищує довжину КЗ. Це можливо за умови, якщо на момент включення жовтого сигналу (початку ПТ) вхідну межу першої КЗ буде перетинати ТЗ зі швидкістю, що перевищує дозволену (більше 60 км./год.), а його тип і габарити будуть свідчити, що його ЗШ перевищує довжину КЗ і ТЗ навіть при повному гальмуванні потрапить в зону перехрестя. В такому випадку кінець ПН визначається за моментом перетинання заднім бампером ТЗ ДКТ з урахуванням часу проїзду від стоп-лінії до ДКТ автомобіля, що починає рух у наступній фазі [Кременец Ю.А., Печерский М.П., Афанасьев Μ.Б. Технические средства организации дорожного движения: Учебник для вузов. – М.: ИКЦ "Академкнига", 2005, с. 56.] TПі t рк t гш t i t i 1 , 35 де t рк - час реакції водія на зміну сигналу світлофора; t гш - час, необхідний ТЗ для проїзду lгш ; t i - час руху ТЗ до ДКТ; t i 1 - час руху від стоп-лінії до ДКТ автомобіля, що починає рух у наступній фазі. З урахуванням усіх складових (4) формулу для визначення часу дії ПТ для цього випадку можна надати у наступному вигляді TПі t рк 40 45 50 (4) l ДКТ l l Va1 , 3,6 i a 3,6 7,2 a T Va1 Va2 (5) де Va1 - середня швидкість ТЗ при русі на підході до перехрестя та в зоні перехрестя без гальмування; a - середнє уповільнення ТЗ при включенні сигналу, що забороняє рух; li відстань від стоп-лінії до ДКТ; la - довжина ТЗ; l Д КТ - відстань від стоп-лінії до ДКТ для ТЗ, що починає рух у наступній фазі; Va2 - середня швидкість ТЗ, що починає рух у наступній фазі. Така послідовність дій по визначенню часу дії ПТ у багатьох випадках дозволяє скоротити його тривалість, оскільки дозволяє більш точно врахувати ті ТЗ, що реально мають змогу зупинитися у стоп-лінії, навіть у випадку, як що на момент початку ПТ вже перетнули вхідні межі першої КЗ. Визначення часу дії ПТ по реальних значеннях виміру параметрів руху конкретних ТЗ, а не по загальноприйнятих спрощених формулах, також дозволяє більш точно визначити ПТ та взагалі скоротити втрачений час у циклі регулювання. Фіксацію ТЗ, що в'їжджають в другу КЗ, здійснюють по їх задніх бамперах при пересіченні одного з кіл (наприклад R5), при цьому завдяки періодичному скануванню зі зміною оптичної осі лазерного променя (з радіуса R5 на R6 і навпаки) визначається момент в'їзду, швидкість, уповільнення (прискорення), довжина, тип, кількість і послідовність ТЗ, що реально в'їхали в 3 UA 120545 U 5 10 другу КЗ по кожній смузі руху за період вимірювань. Радіус R 5, що формує вхідну межу другої КЗ, бажано вибирати за умови, щоб він перевищував найбільш можливу чергу ТЗ, яка може збиратися по одній із смуг руху на сигнал світлофора, що забороняє дорожній рух. Це дає можливість достатньо точно визначити кількість ТЗ mj у черзі по кожній j-й смузі руху на підходах до перехрестя на момент зміни сигналу світлофору на зелений, або на момент початку руху перших у черзі ТЗ. Інформація про швидкість, уповільнення, довжину, тип та час пересування ТЗ на вході в другу КЗ дозволяє більш точно послідовно визначити реальні значення коефіцієнтів приведення до легкового автомобіля К ПРі як відношення величини середнього значення часового інтервалу t в і проїзду КЗ конкретним типом ТЗ до величини середнього значення часового інтервалу t лі проїзду цієї зони легковим автомобілем: К ПРі t в і t лі , 15 (6) Вимірювання такого комплексу параметрів в зоні перехрестя дозволяє також визначити склад та довжину черги ТЗ, що збираються перед стоп-лінією на червоний сигнал світлофора по кожній смузі руху як у фізичних, так і у приведених одиницях: NПРj К ПР1N1 К ПР2N2 ... К ПРiNi , (7) де NПРj - кількість ТЗ у приведених до легкового автомобіля одиницях по j-й смузі руху; 20 25 30 N i - число ТЗ типу і у черзі по j-й смузі руху; К ПРi - коефіцієнт приведення ТЗ типу і до легкового автомобіля. Все це дає можливість підвищити точність спочатку розрахунків, а потім за результатами сканування виходу КЗ першим променем (у зоні стоп-лінії) визначення точного часу роз'їзду T j цих черг по кожній смузі на "зелений" сигнал світлофора і, таким чином, тривалість кожного ОТ. Тривалість ОТ Tоі і- фази визначається моментом закінчення роз'їзду найбільшої за часом черги по смугах руху в даній фазі регулювання. Фіксація кінця ОТ здійснюється за моментом перетинання заднім бампером останнього в черзі ТЗ лінії сканування з радіусом R 1 при умові, що на цей момент першу КЗ або повністю залишать всі ТЗ, або при появі на вході в першу КЗ окремих ТЗ, які за результатами виміру параметрів руху мають ЗШ менший, ніж довжина цієї КЗ. В іншому випадку кінець ОТ формується по максимально фіксованому заздалегідь значенню. Тривалість циклу Tц СР за результатами сканування визначається як сукупність основних та проміжних Tnі тактів всіх фаз Tц m m i 1 i 1 Toі Tnі , (8) 35 Потім, за результатами сканування виходу з першої КЗ, визначають час проходження T j цих черг, що здійснюють роз'їзд ТЗ на "зелений" сигнал світлофора, а значення потоку насичення MHj по кожній смузі розраховують за формулою: MHj 3600 m j Tj , (9) 40 де m j - число приведених транспортних одиниць у черзі, що проходить через стоп-лінію за час T j , j - номер смуги руху (напряму руху). Для визначення часу T j як початкового моменту використовують не момент включення 45 зеленого сигналу, а момент перетинання стоп-лінії переднім бампером першого в черзі ТЗ (але, 4 UA 120545 U якщо ТЗ вже перетнув або стоїть на стоп-лінії, то момент початку його руху). Як кінцевий момент при визначенні значення T j пропонується брати момент проходження над стоп-лінією 5 заднього бампера останнього в черзі ТЗ. Такий підхід дозволяє вилучити зі значення T j величину додаткового часу, необхідного для реакції водія на зміну світлофорного сигналу, а також уникнути помилки, що може бути викликана неповним урахуванням довжини останнього в черзі ТЗ. Сканування виходу КЗ першим променем дає змогу одночасно визначити інтенсивність руху ТЗ у приведених одиницях (пр. од./год.) по кожній j-й смузі руху у продовж часу циклу Tц світлофорного регулювання 10 Nj 3600 m j Tц , (10) Далі визначають ФК для кожної смуги руху у даній фазі світлофорного регулювання як відношення Y jk N jk MHjk Tj Tц , (11) 15 де Y jk - фазовий коефіцієнт j-ї смуги руху у k-й фазі регулювання. За розрахунковий (що визначає тривалість основного k-го такту) приймають найбільший по значенню ФК Y jk у даній k-й фазі регулювання. Менші значення Y jk можуть бути використані в 20 25 30 35 40 45 50 подальшому для визначення мінімально необхідної тривалості основного такту. Таким чином, оперативне визначення реальних параметрів руху (швидкості, прискорення, типу та габаритів) окремих видів ТЗ, довжини черги, реальних значень ПН та інтенсивності по усіх смугах руху на підході та в зоні перехрестя шляхом потрійного високошвидкісного сканування дає можливість одержати (в реальному масштабі часу) більш точні значення часу дії ОТ і ПТ, циклу СР, потоків насичення та ФК для управління рухом на перехресті. Визначення параметрів руху ТЗ, ПН, ФК, часу дії ОТ та ОП за інформацією про прискорення (уповільнення) ТЗ на кордонах КЗ підвищує точність при визначенні оптимальних параметрів поточних значень елементів світлофорного циклу. На фіг. 2 надана спрощена структурна схема пристрою, що розкриває основні відмінні риси запропонованого способу. Скануючий блок 1 має у своєму складі лазерний випромінювач 3 вузькоспрямованого інфрачервоного променя і вузол розгортки 4, які формують трипроменеве конусне покрокове сканування зони перехрестя за допомогою оптичних відхиляючих пристроїв 5 1, 52 та 53 (дискретних сканісторів). Зміна положень кутів розгортки променів 8 1, 82 та 83 здійснюється в реперній точці по черзі на кожному періоді сканування сигналом, що надходить з реперного фотоприймача 2 (ФП0) на входи дискретних сканісторів 51, 52 та 53. Три оптичні промені 81, 82 та 83 формуються вузлом розгортки зі зміщенням на третину періоду (120°), що дає змогу фіксувати кожний з них у реперній точці і чітко розпізнавати відбиті від ТЗ сигнали на входах і виході з КЗ та перехрестя в цілому. Зміна і чергування кутів нахилу розгортки (з R 1 на R2, з R3 на R4 та з R5 на R6 або навпаки) необхідна для однозначного визначення положення ТЗ щодо кіл сканування, швидкості, прискорення, типу і напрямку руху ТЗ в КЗ і зоні перехрестя по кожній смузі руху. Оптичні фотоприймачі 2 (ФЦ) в процесі розгортання третього 8 3 та другого 82 лазерних променів по одному з кіл послідовно сприймають сигнали, відбиті від ТЗ, що рухаються по різних смугах руху на входах в першу та другу КЗ. При цьому почергове з високою швидкістю зміни радіусів сканування (з R3 на R4 та з R5 на R6 або навпаки) дозволяє точно визначити час переміщень ТЗ на дистанції (R4-R3 та R6-R5), швидкість, прискорення, тип та кількість ТЗ, що в'їжджають в КЗ по кожній смузі руху в даному циклі регулювання. В процесі розгортки першого 81 лазерного променя на дистанції (R2-R1) на виході з КЗ (у зоні стоп-ліній) послідовно визначають швидкість, прискорення, довжину, тип та кількість ТЗ, напрямки їх руху, коефіцієнти приведення ТЗ до легкового автомобіля, число mj приведених транспортних одиниць у кожній черзі, інтервали та інтенсивності по кожній смузі за будь-яке фіксоване значення часу. Розгортка лазерного променя 81 на виході з зони перехрестя 5 UA 120545 U 5 10 15 20 25 30 35 дозволяє визначити кількість, тип та інші параметри руху ТЗ, що покинули зону перехрестя по різних напрямках у цей же такт регулювання. Фотоприймачі 2, направлені на вхідні смуги руху, сприймають послідовно відбиті сигнали першого 81, другого 82 і третього 83 лазерних променів з часовою затримкою на третину періоду сканування, що дає можливість окремого розпізнавання сигналів різних променів. Перетворювач 6 сигналу кожного ФП, відповідної смуги руху перетворює сигнали в імпульсно-цифрові коди, які вводяться в обчислювальний пристрій 7, де далі визначаються всі необхідні параметри за будь-який час виміру (за час тривалості основного або проміжного такту та циклу світлофорного регулювання). Для цього сигнали зміни елементів циклу світлофорного регулювання з виходу світлофорного об'єкта 9 подаються на відповідний вхід обчислювального пристрою 7. Сигнали з виходу реперного фотоприймача 2 (ФП 0) через перетворювач 60 подаються на відповідні входи дискретних сканісторів 5 1, 52 та 53 та обчислювального пристрою 7 для чіткого визначення положення кожного променя за смугами руху відносно реперної точки. Обчислювальний пристрій 7 на протязі циклу регулювання зберігає інформацію про тип, кількість і напрямки руху ТЗ, що знаходяться в КЗ або в зоні перехрестя на момент початку ОТ та ПТ. В обчислювальний пристрій 7 закладено алгоритм та деякі константи для розрахунку ЗШ різного типу ТЗ, за якими визначається можливість повного гальмування ТЗ до стоп-лінії, відстань та час проїзду до ДКТ для кожної смуги руху у різних фазах регулювання, зберігається інформація про коефіцієнти приведення, склад ТЗ та поточні значення черг по смугах руху, тоді з'являється можливість визначення не тільки усіх перелічених вище параметрів, але і картограм інтенсивностей ТП у фізичних або приведених одиницях, потоків насичення та ФК по окремих смугах руху у реальному масштабі часу. Після того, як останній ТЗ, що з початку ПТ знаходився в зоні перехрестя, перетне своїм переднім бампером лінію сканування R2 на виході з перехрестя або визначиться кінець ПТ з урахуванням перетину ТЗ ДКТ, обчислювальний пристрій 7 видає сигнал завершення ПТ на світлофорний об'єкт 9. В разі відсутності ТЗ в зоні перехрестя на момент початку ПТ, обчислювальний пристрій 7 видає сигнал завершення ПТ через мінімально вибраний заздалегідь час, призначений, наприклад, для завершення руху пішоходів. Обчислювальний пристрій 7 також визначає моменти завершення ОТ для різних умов руху ТП на перехресті. Таким чином, запропонований спосіб дає можливість одержати найбільш повний комплекс інформації для контролю, підвищення точності і подальшого оперативного (в реальному масштабі часу) визначення часу дії ОТ, ПТ, циклу регулювання, ПН та ФК. Перевагою запропонованого способу також є те, що його реалізацію можна здійснити одним загальним пристроєм, розташованим в зоні перехрестя, який одночасно дає змогу визначити ряд інших параметрів руху ТП. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 40 45 50 55 60 Спосіб визначення фазових коефіцієнтів, оснований на скануванні одночасно трьома гостроспрямованими лазерними променями зони перехрестя з точки над його геометричним центром конусним видом розгортки, причому оптична вісь одного з положень розгортки першого променя вибирається так, щоб він описував коло на проїжджій частині перехрестя в області стоп-ліній всіх його підходів, а друге положення розгортки відповідало відхиленню лазерного променя, при якому радіус другого концентричного кола на поверхні проїзної частини зменшується на певну задану величину, при цьому зміна положень розгортки здійснюється з високою швидкістю по черзі через кожен період сканування, а другий промінь розгортки формується зі зміщенням на третину періоду по колу розгортки та зі зміною кута нахилу оптичної осі променя, як і першого, по черзі у реперній точці через кожен період сканування так, щоб радіус другого концентричного кола на вході першої контрольованої зони зменшувався на певну задану величину, третій оптичний промінь лазерної розгортки формується зі зміщенням відносно до другого ще на третину періоду по колу розгортки, а кути нахилу оптичних осей третього променя, як і двох перших, змінюють по черзі у реперній точці через кожен період сканування так, щоб радіус другого концентричного кола на вході другої контрольованої зони зменшувався на певну задану величину, при цьому відстань між вхідною і вихідною межами другої контрольованої зони вибирають за умови, щоб вона перевищувала найбільш можливу чергу транспортних засобів, яка може збиратися по одній із смуг руху на сигнал світлофора, що забороняє дорожній рух, подальшому прийомі відображених оптичних сигналів фотоприймачами і надалі перетворенні цих сигналів в імпульсно-числові коди, за якими визначаються швидкість, тип та час пересування транспортних засобів на входах і виходах обох 6 UA 120545 U 5 10 15 контрольованих зон, напрямки їх руху по смугах, кількість транспортних засобів у черзі у фізичних та приведених одиницях, значення зупиночного шляху різного типу транспортних засобів, час пересування черги зони стоп-ліній по всіх смугах руху упродовж окремих тактів одного циклу світлофорного регулювання, а потім наявність транспортних засобів по окремих смугах в першій контрольованій зоні та в зоні самого перехрестя на момент початку проміжного такту, а момент закінчення проміжного такту формується за моментами, коли останній транспортний засіб, що знаходився в зоні перехрестя, почне перетинати своїм переднім бампером одну з ліній сканування першого променя по смугах руху на виході з перехрестя, а тривалість циклу регулювання визначається як сукупність основних та проміжних тактів всіх фаз, який відрізняється тим, що на входах і виходах контрольованих зон визначають прискорення (уповільнення) кожного транспортного засобу і по швидкості та часу перетинання кордонів контрольованих зон спочатку їх передніми, а потім задніми бамперами послідовно визначають довжину, тип транспортного засобу, його зупиночний шлях, час дії основних та проміжних тактів з урахуванням часу проїзду дальніх конфліктних точок тих транспортних засобів, які на момент початку проміжного такту здійснювали перетин вхідних ліній сканування першої контрольованої зони. 7 UA 120545 U Комп’ютерна верстка Л. Ціхановська Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 8
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G08G 1/056, G08G 1/095
Мітки: коефіцієнтів, спосіб, визначення, фазових
Код посилання
<a href="https://ua.patents.su/10-120545-sposib-viznachennya-fazovikh-koeficiehntiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення фазових коефіцієнтів</a>
Спосіб визначення фазових коефіцієнтів регульованого перехрестя
Номер патенту: 88669
Опубліковано: 25.03.2014
Автор: Денисенко Олег Васильович
МПК: G08G 1/09
Мітки: коефіцієнтів, спосіб, перехрестя, визначення, регульованого, фазових
Формула / Реферат:
Спосіб визначення фазових коефіцієнтів регульованого перехрестя, що включає сканування двома гостроспрямованими лазерними променями зони перехрестя в точці над його геометричним центром конусним видом розгортки, причому оптична вісь одного з положень розгортки першого променя вибирається так, щоб він описував коло на проїжджій частині перехрестя в області стоп-ліній всіх його підходів, а друге положення розгортки відповідало відхиленню...
Спосіб визначення фазових коефіцієнтів регульованого перехрестя
Номер патенту: 112180
Опубліковано: 10.08.2016
Автор: Денисенко Олег Васильович
МПК: G08G 1/056, G08G 1/095
Мітки: регульованого, визначення, спосіб, коефіцієнтів, фазових, перехрестя
Формула / Реферат:
Спосіб визначення фазових коефіцієнтів регульованого перехрестя, оснований на скануванні двома гостроспрямованими лазерними променями зони перехрестя з точки над його геометричним центром конусним видом розгортки, причому оптичну вісь одного з положень розгортки першого променя вибирають так, щоб він описував коло на проїжджій частині перехрестя в області стоп-ліній всіх його підходів, а друге положення розгортки відповідало відхиленню...
Спосіб визначення ідеальних потоків насичення та поправочних коефіцієнтів для регульованих перехресть
Номер патенту: 110805
Опубліковано: 25.10.2016
Автор: Денисенко Олег Васильович
МПК: G08G 1/09
Мітки: ідеальних, потоків, регульованих, визначення, перехресть, поправочних, коефіцієнтів, спосіб, насичення
Формула / Реферат:
Спосіб визначення ідеальних потоків насичення та поправочних коефіцієнтів для регульованих перехресть, який заснований на скануванні двома гостроспрямованими лазерними променями зони перехрестя з точки над його геометричним центром конусним видом розгортки, причому оптична вісь одного з положень розгортки першого променя вибирається так, щоб він описував коло на проїжджій частині перехрестя в області стоп-ліній всіх його підходів, а друге...
Спосіб визначення параметрів транспортних потоків у зоні перехрестя
Номер патенту: 71913
Опубліковано: 25.07.2012
Автори: Денисенко Олег Васильович, Ярута Антон Миколайович, Левтеров Андрій Іванович
МПК: G08G 1/09
Мітки: перехрестя, транспортних, зони, спосіб, параметрів, потоків, визначення
Формула / Реферат:
Спосіб визначення параметрів транспортних потоків у зоні перехрестя, заснований на скануванні гостроспрямованого лазерного променя поперечного перерізу багатосмугової дороги спеціальним дискретним сканістором за програмою, що забезпечує відхилення лазерного випромінювання в необхідне число положень, що відповідає числу смуг дороги, прийомі відображених оптичних сигналів фотоприймачем і надалі перетворенні цих сигналів в імпульсно-числовий...
Спосіб визначення потоків насичення регульованого перехрестя
Номер патенту: 84483
Опубліковано: 25.10.2013
Автори: Денисенко Олег Васильович, Левтеров Андрій Іванович, Бубиніна Наталія Сергіївна
МПК: G08G 1/09
Мітки: визначення, потоків, спосіб, перехрестя, регульованого, насичення
Формула / Реферат:
Спосіб визначення потоків насичення регульованого перехрестя, заснований на скануванні гостроспрямованим лазерним променем зони перехрестя з точці над його геометричним центром конусним видом розгортки, причому оптична вісь одного з положень розгортки вибирається так, щоб лазерний промінь описував коло на проїжджій частині перехрестя в області стоп-ліній всіх його підходів, а друге положення розгортки відповідає відхиленню лазерного променя,...
Попередній патент: Спосіб визначення відношення групи прибуття
Наступний патент: Спосіб визначення тривалості тактів та циклу світлофорної сигналізації
Випадковий патент: Композиція для зв'язування розчинних сполук кобальту