Спосіб визначення параметрів транспортних потоків у зоні перехрестя
Номер патенту: 71913
Опубліковано: 25.07.2012
Автори: Ярута Антон Миколайович, Левтеров Андрій Іванович, Денисенко Олег Васильович

Формула / Реферат
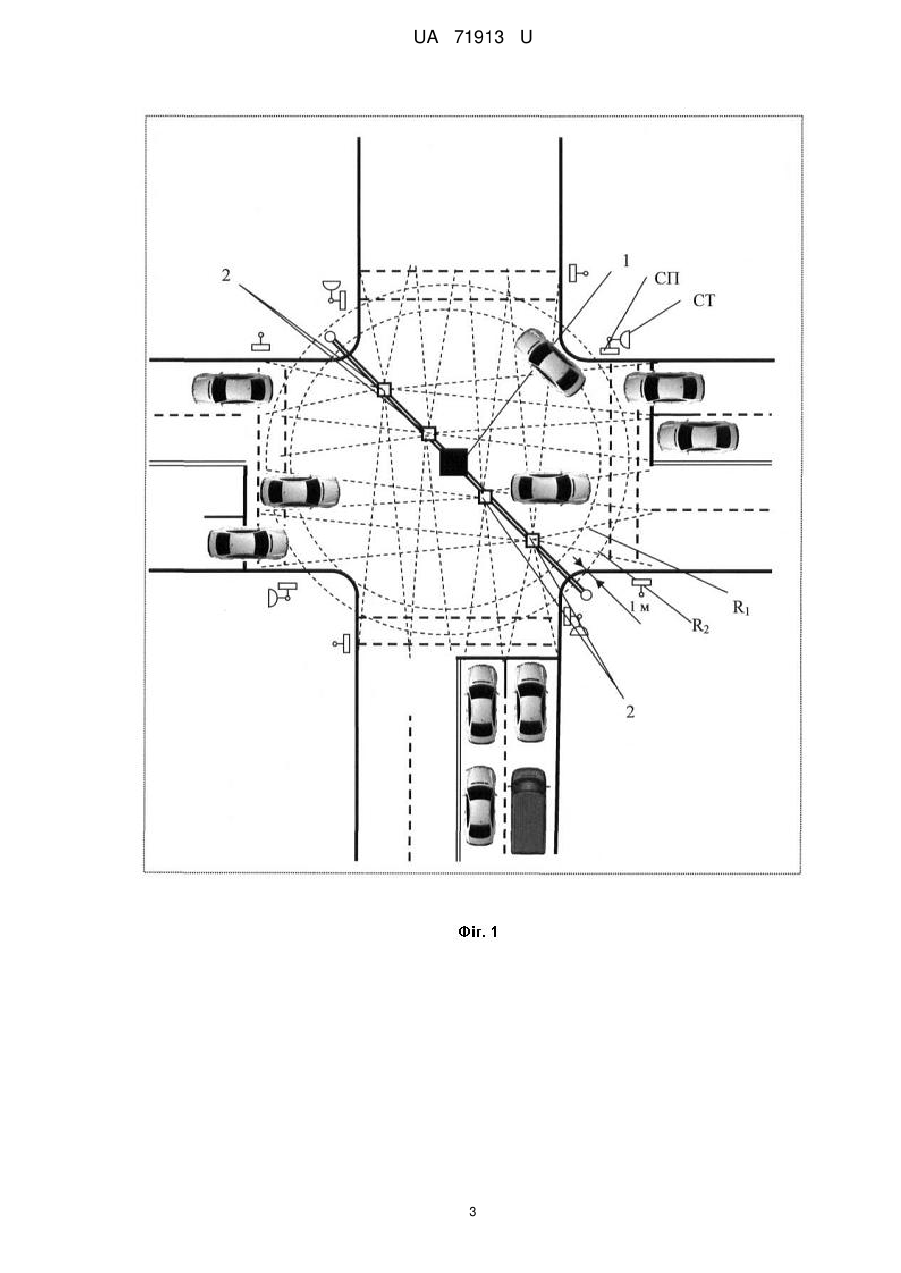
Спосіб визначення параметрів транспортних потоків у зоні перехрестя, заснований на скануванні гостроспрямованого лазерного променя поперечного перерізу багатосмугової дороги спеціальним дискретним сканістором за програмою, що забезпечує відхилення лазерного випромінювання в необхідне число положень, що відповідає числу смуг дороги, прийомі відображених оптичних сигналів фотоприймачем і надалі перетворенні цих сигналів в імпульсно-числовий код, за яким обчислюються швидкість і тип транспортного засобу, інтенсивність і інтервали між транспортними засобами, який відрізняється тим, що сканування зони перехрестя здійснюється з точці над його геометричним центром конусним видом розгортки, причому оптична вісь одного з положень розгортки вибирається так, щоб лазерний промінь описував коло на проїжджій частині перехрестя в області "стоп-ліній" всіх його підходів, а друге положення розгортки відповідає відхиленню лазерного променя, при якому радіус другого концентричного кола на поверхні проїжджої частини зменшувався на певну задану величину, при цьому зміна положень розгортки здійснюється з високою швидкістю по черзі через кожен період сканування, при чому залежно від результатів сканування визначають вищевказані параметри транспортних потоків по всіх смугах руху в зоні перехрестя, а також повну картограму руху транспортних потоків.
Текст
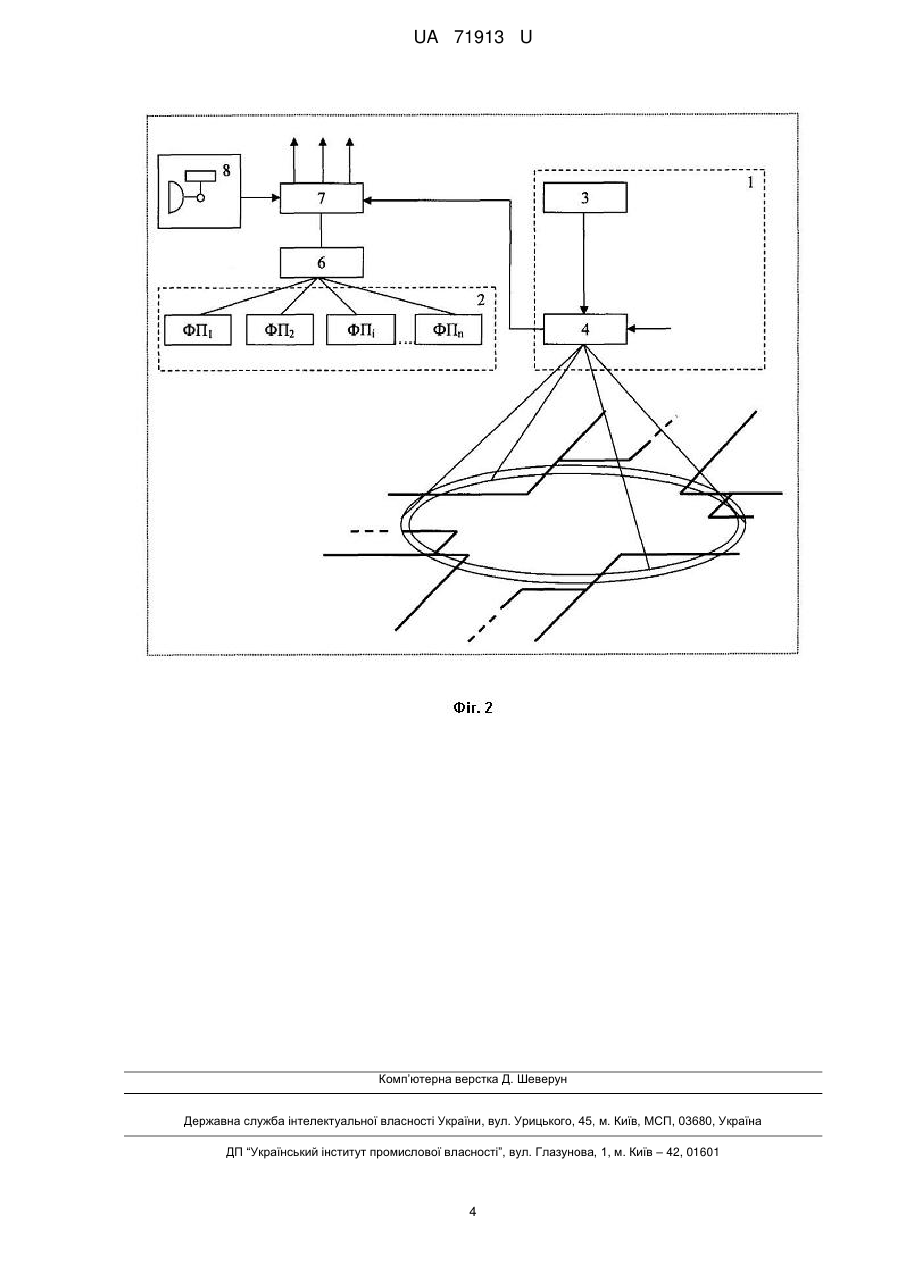
Реферат: UA 71913 U UA 71913 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до систем регулювання дорожнього руху (ДР) і може бути використана при розробці агрегатної системи засобів управління ДР, при розробці АСУ-ДР, в системах інформаційного забезпечення завантаження перехресть ВДМ, а також для підвищення ефективності управління рухом транспорту на регульованих перехрестях. Цей спосіб може бути використаний для одночасного визначення основних параметрів транспортних потоків (ТП): моменту проїзду транспортним засобом (ТЗ) контрольованої зони та перехрестя в цілому, швидкості, типу і напрямку руху ТЗ, їх інтенсивності руху по кожній смузі за будь-який проміжок часу, інтервалів рухів між ТЗ на перетинах багатосмугових доріг в одному рівні. Відомий спосіб вимірювання параметрів ТП на багатосмугових дорогах і магістралях, згідно з яким здійснюється сканування гостронаправленим лазерним променем у площині поперечного перерізу багатосмугової дороги спеціальним дискретним сканером по програмі, таким чином, щоб забезпечити відхилення променя лазерного випромінювання в необхідне число положень (за кількістю смуг руху) для визначення параметрів ТП по кожній смузі руху і по дорозі в цілому. Відбитий оптичний сигнал вловлюється фотоприймачем і перетворюється в імпульсночисловий код, за яким обчислюються такі параметри ТП, як швидкість і тип ТЗ, інтенсивність руху і інтервали між ТЗ (Авторське свідоцтво СРСР № 492211 А1). Цей спосіб і пристрій, що його реалізує, є найбільш близьким аналогом до способу, що заявляється. Недоліком цього способу і пристрою, що його реалізує, є низька точність визначення таких параметрів ТП як швидкість і тип ТЗ через практично поперечний напрям сканування проїзної частини на багатосмуговій дорозі із застосуванням допплерівського способу визначення швидкості ТЗ. Крім того, даний спосіб і пристрій, що його реалізує, мають вузькі функціональні можливості, оскільки можуть бути використані для вимірювання зазначених у найближчому аналозі параметрів ТП в обмеженій зоні дороги і не дозволяють забезпечити вимірювання повного комплексу параметрів ТП на такому елементі ВДМ як перехрестя. Це призводить до серйозних ускладнень в реалізації оптимального управління на регульованих перехрестях транспортної мережі, оскільки потребує установки на перехресті великої кількості різних за призначенням і віддалених один від одного детекторів, пов'язаних складною системою комунікацій. Це знижує надійність і точність вихідних даних, що поступають в систему управління. В основу корисної моделі поставлена задача - підвищення точності і розширення функціональних можливостей при одночасному визначенні комплексу параметрів за всіма підходами та виходами багатосмугових доріг на перехресті: швидкості і напряму руху ТЗ у зоні перехрестя, інтервалів руху ТЗ та їх типів, інтенсивності ТП по кожній смузі руху. Здійснюється це одним загальним пристроєм з єдиною просторовою зоною. Поставлена задача вирішується тим, що у способі покладено конусне покрокове сканування вузьконаправленим лазерним променем інфрачервоного діапазону тимчасово всіх підходів і виходів перехрестя, що дає можливість забезпечити визначення комплексу вищевказаних параметрів ТП по кожній смузі руху в залежності від результатів сканування. На фіг. 1 представлена схема, яка розкриває основні відмінні особливості запропонованого способу і послідовність його дій. Відповідно до запропонованого способу розгортка лазерного променя здійснюється скануючим блоком 1, який розташовують над перехрестям на спеціальному кронштейні в точці, що відповідає геометричному центру перехрестя. У скануючому блоці, залежно від висоти його розміщення, одну з оптичних осей розгортки підбирають так, щоб лазерний промінь, описував конусну поверхню з колом на проїжджій частині перехрестя в області «стоп-ліній» всіх його підходів (фіг. 1). До складу скануючого блока входить оптичний відхилюючий пристрій (дискретний сканістор), що забезпечує відхилення осі лазерного променя в необхідне друге положення, при якому радіус кола на поверхні проїжджої частини зменшується на задану величину (наприклад, на 1 м). Таким чином, блок сканера на кожному наступному періоді сканування змінює розгортку з одної оптичної осі на іншу, описує в зоні перехрестя на його поверхні дві концентричні кола з різницею радіусів (R1-R2=1 м). Оптичні фотоприймачі 2 (ФПі) в процесі розгортки лазерного променя по одному з кіл послідовно сприймають сигнали, відбитівід ТЗ, що рухаються по різних смугах руху як на підходах, так і на виходах перехрестя. При цьому, почергова з високою швидкістю зміни радіусів сканування (з R1 на R2 і назад) дозволяє точно визначити час переміщень ТЗ на дистанції (R1R2) і швидкості руху ТЗ в зоні «стоп-ліній». Швидкість переміщення ТЗ і час його фіксації в 1 UA 71913 U 5 10 15 20 25 30 35 площині одного з конусів розгортки, дозволяють послідовно визначити довжину і тип ТЗ, напрямок, інтервали і інтенсивність по кожній смузі за будь-яке фіксоване значення часу. Вимірювання такого комплексу параметрів в зоні перехрестя дозволяє визначити картограму інтенсивності руху ТЗ за невеликі періоди часу (цикл світлофорного регулювання), що істотно розширює функціональні можливості способу при визначенні оптимальних параметрів поточних значень елементів світлофорного циклу. На фіг. 2 представлена структурна схема пристрою, що розкриває основні відмінні риси пропонованого способу. Лазерний випромінювач 3 (фіг. 1) вузькоспрямованого інфрачервоного променя і вузол розгортки 4 формують конусне покрокове сканування, причому один з кутів сканування забезпечує кругову траєкторію руху променя (з радіусом R1) в зоні «стоп-ліній», а другий з кутів - дещо менший радіус (R2) кругової траєкторії. Зміна положень кутів розгортки здійснюється в реперній точці по черзі на кожному періоді сканування оптичним відхиляючим пристроєм 5 (дискретним сканістором) (Фіг. 2). Зміна і чергування кутів нахилу розгортки необхідні для однозначного визначення положення ТЗ щодо кіл сканування (з R1 або R2) на кожному періоді розгортки і визначення напрямку руху ТЗ (від R1 до R2 або навпаки) по кожній смузі перехрестя. Відбитий від ТЗ оптичний сигнал (при наявності ТЗ в зоні, що контролюється, даної і-ой смуги) вловлюється відповідними фотоприймачами 2 (ФП і) кожної смуги руху, як на входах, так і на виходах перехрестя. Перетворювач 6 сигналу кожного ФПі, відповідної смуги руху, перетворює в імпульсноцифровий код, який вводиться в обчислювальний пристрій 7, де далі визначаються всі вищеперелічені параметри за будь-який проміжок часу або за час циклу СР, інформація про яке може надходити в 6 з світлофорного об'єкта 8. Якщо в обчислювальний пристрій закладається алгоритм, правила і константи, відповідні діапазонам тимчасових інтервалів руху ТЗ у зоні перехрестя при всіляких змінах напрямків їх руху по смугах, тоді з'являється можливість визначення картограми інтенсивності ТП на всьому перехресті. Таким чином, запропонований спосіб дає можливість одержання найбільш повного комплексу інформації для контролю і подальшого оперативного (в реальному масштабі часу) управління рухом на перехресті. Перевагою запропонованого способу також є і те, що його реалізацію можна здійснити одним пристроєм, розташованим в зоні контрольованого перехрестя. Зважаючи на малу потужність лазерного інфрачервоного випромінювання воно не буде мати шкідливого впливу на водіїв і пішоходів. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 40 45 50 Спосіб визначення параметрів транспортних потоків у зоні перехрестя, заснований на скануванні гостроспрямованого лазерного променя поперечного перерізу багатосмугової дороги спеціальним дискретним сканістором за програмою, що забезпечує відхилення лазерного випромінювання в необхідне число положень, що відповідає числу смуг дороги, прийомі відображених оптичних сигналів фотоприймачем і надалі перетворенні цих сигналів в імпульсно-числовий код, за яким обчислюються швидкість і тип транспортного засобу, інтенсивність і інтервали між транспортними засобами, який відрізняється тим, що сканування зони перехрестя здійснюється з точці над його геометричним центром конусним видом розгортки, причому оптична вісь одного з положень розгортки вибирається так, щоб лазерний промінь описував коло на проїжджій частині перехрестя в області "стоп-ліній" всіх його підходів, а друге положення розгортки відповідає відхиленню лазерного променя, при якому радіус другого концентричного кола на поверхні проїжджої частини зменшувався на певну задану величину, при цьому зміна положень розгортки здійснюється з високою швидкістю по черзі через кожен період сканування, при чому залежно від результатів сканування визначають вищевказані параметри транспортних потоків по всіх смугах руху в зоні перехрестя, а також повну картограму руху транспортних потоків. 2 UA 71913 U 3 UA 71913 U Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of traffic parameters in the zone of road intersection
Автори англійськоюLevterov Andrii Ivanovych, Denysenko Oleh Ivanovych, Yaruta Anton Mykolaiovych
Назва патенту російськоюСпособ определения параметров транспортных потоков в зоне перекрестка
Автори російськоюЛевтеров Андрей Иванович, Денисенко Олег Васильевич, Ярута Антон Николаевич
МПК / Мітки
МПК: G08G 1/09
Мітки: потоків, перехрестя, спосіб, зони, параметрів, транспортних, визначення
Код посилання
<a href="https://ua.patents.su/6-71913-sposib-viznachennya-parametriv-transportnikh-potokiv-u-zoni-perekhrestya.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення параметрів транспортних потоків у зоні перехрестя</a>
Пристрій для вимірювання параметрів транспортних потоків
Номер патенту: 68088
Опубліковано: 12.03.2012
Автори: Левтеров Андрій Іванович, Ярута Антон Миколайович, Денисенко Олег Васильович, Альошин Геннадій Васильович
МПК: G08G 1/09
Мітки: параметрів, пристрій, транспортних, вимірювання, потоків
Формула / Реферат:
Пристрій для вимірювання параметрів транспортних потоків, що вміщує датчик лазерного випромінювання інфрачервоного діапазону, модулятор, задавальний генератор, вирішуючий підсилювач, фотоприймач, двократний перетворювач частоти, вимірювач частоти і високочастотний детектор, причому датчик лазерного випромінювання інфрачервоного діапазону підключений до модулятора, задавальний генератор через резонансний підсилювач підключений до модулятора...
Пристрій для вимірювання параметрів транспортних потоків
Номер патенту: 60154
Опубліковано: 10.06.2011
Автори: Ярута Антон Миколайович, Левтеров Андрій Іванович, Денисенко Олег Васильович
МПК: G08G 1/09
Мітки: пристрій, параметрів, вимірювання, потоків, транспортних
Формула / Реферат:
Пристрій для вимірювання параметрів транспортних потоків, що складається з датчика лазерного випромінювання інфрачервоного діапазону, оптичного модулятора, генератора розгортки, лічильника-дешифратора, підсилювачів, дискретного сканера, задавального генератора, елемента визначення частоти доплерівського зсуву сигналу, перетворювача частоти зсуву сигналу і фотоприймача, причому генератор розгортки через лічильник-дешифратор, що послідовно...
Пристрій для вимірювання параметрів транспортних потоків
Номер патенту: 65119
Опубліковано: 25.11.2011
Автори: Левтеров Андрій Іванович, Ярута Антон Миколайович
МПК: G08G 1/00
Мітки: потоків, параметрів, пристрій, транспортних, вимірювання
Формула / Реферат:
Пристрій для вимірювання параметрів транспортних потоків, що складається з датчика лазерного випромінювання інфрачервоного діапазону, оптичного модулятора, генератора імпульсів, лічильника-дешифратора, підсилювачів, задавального генератора, резонансного підсилювача, елемента визначення частоти доплерівського зсуву сигналу, перетворювача частоти зсуву сигналу і фотоприймача, причому генератор імпульсів через лічильник-дешифратор послідовно...
Багатофункціональний будівельний комплекс для формування перехрещування пішохідних і/або транспортних потоків
Номер патенту: 70398
Опубліковано: 15.10.2004
Автори: Фролов Антон Владіміровіч, Сопромадзе Васілій Платоновіч, Гурєвіч Ілья Бєровіч
Мітки: перехрещування, багатофункціональний, транспортних, формування, будівельний, потоків, комплекс, пішохідних
Формула / Реферат:
1. Багатофункціональний будівельний комплекс для формування перехрещування пішохідних та/або транспортних потоків, що включає надземний пішохідний перехід, виконаний у вигляді перекриття, укріпленого над перехрещуванням пішохідних та/або транспортних потоків на висоті, безпечній для руху транспортних засобів під ним, на опорах, обпертих на фундаменти, із засобами пересування пішоходів на пішохідний перехід та з нього, встановленими поза...
Пристрій для вимірювання параметрів транспортних засобів
Номер патенту: 62015
Опубліковано: 10.08.2011
Автори: Коломійцев Олексій Володимирович, Альошин Геннадій Васильович, Ярута Антон Миколайович, Левтеров Андрій Іванович
МПК: G08G 1/052, G01S 11/00, G01S 17/42
Мітки: засобів, параметрів, пристрій, вимірювання, транспортних
Формула / Реферат:
Пристрій для вимірювання параметрів транспортних засобів, що містить послідовно підключені лазер з накачкою, селектор подовжніх мод, блок дефлекторів з підключеним до нього блоком керування дефлекторами та передавальну оптику, послідовно підключені приймальну оптику, фотодетектор, широкосмуговий підсилювач, резонансні підсилювачі, формувачі імпульсів та лічильники імпульсів мод променів і електронно-цифрову обчислювальну машину (ЕЦОМ), яка...
Попередній патент: Спосіб одержання порошкоподібних органо-мінеральних мікродобрив гумату натрію/калію
Наступний патент: Гусеничний ланцюг
Випадковий патент: Гідроксаміди (4-сульфоніламіно)тетрагідропіран-4-карбонової кислоти