Пристрій та спосіб для безконтактного розпізнавання країв обробки або відповідних напрямних параметрів
Формула / Реферат
1. Пристрій для безконтактного розпізнавання країв обробки або напрямних параметрів, зокрема для автоматичного спрямування сільськогосподарських робочих машин вздовж виробленого за попередній або інший робочий хід напрямного параметра, що визначає подальший або безпосередній етап обробки, який складається щонайменше з одного пристрою, встановленого над краєм обробки та має щонайменше один передавальний пристрій, який випромінює електромагнітні хвилі таким чином, що можна заздалегідь розпізнати краї обробки або напрямні параметри в робочому напрямку, та щонайменше один приймальний пристрій, оснащений засобом для визначення відстані до окремих точок відбиття електромагнітних хвиль, який відрізняється тим, що має засіб для визначення щонайменше одного специфічного для країв обробки параметра за відбиттям надісланої електромагнітної хвилі.
2. Пристрій за п. 1, який відрізняється тим, що як специфічний для країв обробки параметр за відбиттям електромагнітних хвиль вибрано інтенсивність.
3. Пристрій за п. 1 або 2, який відрізняється тим, що як специфічний для краю обробки параметр за відбиттям електромагнітних хвиль вибрано зсув по фазі.
4. Пристрій за одним із пп. 1-3, який відрізняється тим, що засіб для визначення щонайменше одного специфічного для країв обробки параметра за відбиттям надісланої електромагнітної хвилі має щонайменше один передавальний пристрій і один або більше приймальних пристроїв з антенною решіткою.
5. Пристрій за одним із пп. 1-4, який відрізняється тим, що передавальний або приймальний пристрій виконано у вигляді скануючого пристрою.
6. Пристрій за одним із пп. 1-5, який відрізняється тим, що робоча ширина пристрою має звужений кут сканування відносно осі зони хитань, наприклад, +/- 6°.
7. Пристрій за одним із пп. 1 - 6, який відрізняється тим, що має засіб для вибору в ручному або автоматичному режимі способу розрахунку для генерування сигналу краю обробки або напрямного параметра відповідно до краю обробки.
8. Пристрій за одним із пп. 1-7, який відрізняється тим, що має засіб для передачі визначеного безпосередньо або з поправкою значення положення краю обробки або напрямного параметра в блок автоматичного управління машиною та відповідного корегування значення положення пристрою і/або робочої ширини за допомогою різних засобів, наприклад, шинної системи машини.
9. Пристрій за одним із пп. 1-8, який відрізняється тим, що передавально-приймальний пристрій або передавальний та приймальний пристрої виконані з можливістю автоматичної чи ручної перестановки в горизонтальному і/або вертикальному положенні або щонайменше в похилому положенні.
10. Пристрій за одним із пп. 1-9, який відрізняється тим, що має засіб для пізнавання кінця чи початку поля або напрямного параметра, який виконано з можливістю передачі одержаних результатів водію та на блок автоматичного управління машиною, що передаються через відомий засіб на автоматичний пристрій кінця або початку поля.
11. Пристрій за одним із пп. 1-7, який відрізняється тим, що має пристрій, який виконано з можливістю запам'ятовування в робочій машині певних значень дальності та відповідних специфічних для краю обробки параметрів в функції абсолютного положення, наприклад, в функції координат глобальної супутникової системи радіовизначення або у функції відносного положення, наприклад, в функції кута сканування.
12. Спосіб визначення краю обробки або напрямного параметра, що включає наступні операції:
- випромінювання електромагнітної хвилі;
- прийом відбитої електромагнітної хвилі та оцінку за нею дальності або щонайменше одного зі специфічних для краю обробки параметрів;
- запам'ятовування окремих зміряних значень;
- розрахунок за окремими зміряними значеннями окремих профілів по робочій ширині пристрою;
- аналіз зміряних значень робочої ширини пристрою згідно з вибраним способом оцінки;
- генерування сигналу дійсного положення краю обробки або напрямного параметра;
- визначення неузгодження за результатами порівняння дійсного й заданого положення та генерування керуючого впливу для автоматичного управління.
13. Спосіб за п. 12, який відрізняється тим, що зміряні значення оцінюють відносно щонайменше одного відповідного зміряного значення.
14. Спосіб за п. 12 або 13, який відрізняється тим, що для розпізнавання краю обробки або напрямного параметра автоматично вибирають спосіб оцінки.
15. Спосіб за одним із пп. 12-14, який відрізняється тим, що спосіб оцінки вибирають за максимальним стрибком зміряного значення та його положенням шляхом співставлення максимальних або мінімальних зміряних значень параметрів, що вимірюються, відшукуючи виміряні параметри по робочій ширині пристрою за місцями з максимальними або мінімальними їхніми значеннями або за місцями максимальних стрибків зміряних значень.
16. Спосіб за одним із пп. 12-15, який відрізняється тим, що дійсне положення краю обробки або напрямного параметра визначають шляхом комбінації властивостей вимірюваних параметрів по робочій ширині одного або більше пристроїв.
17. Спосіб за одним із пп. 12-16, який відрізняється тим, що для надійного розпізнавання краю обробки або борозни аналізують виміряні параметри щонайменше по одній робочій ширині пристрою за положенням максимального значення стрибка специфічного для краю обробки параметра та за положенням максимального значення стрибка дальності і при приблизному збігу двох місць стрибків останнє вибирають як дійсне положення.
18. Спосіб за одним із пп. 12-17, який відрізняється тим, що при наявності можливості вибору значення стрибка тільки за одним вимірюваним параметром це значення вибирають як дійсне положення.
19. Спосіб за одним або більше пп. 12-18, який відрізняється тим, що за зміряними параметрами визначають кінець чи початок краю обробки або напрямного параметра.
20. Спосіб за п. 19, який відрізняється тим, що інформація про розпізнаний кінець чи розпізнаний початок краю обробки або напрямний параметр індикується у водія або активують автоматичний пристрій кінця чи початку поля.
21. Спосіб за одним із пп. 12 - 20, який відрізняється тим, що визначене безпосередньо чи з поправкою, вручну чи автоматично, дійсне положення краю обробки або напрямного параметра, скориговане положення пристрою і/або скориговане значення робочої ширини пристрою передають в блок автоматичного управління машиною.
22. Спосіб за одним або більше пп. 12-21, який відрізняється тим, що розташування на машині передавально-приймального пристрою або передавального та приймального пристроїв чи їхній нахил регулюють або керують ними таким чином, щоб підтримувати постійним щонайменше один зі специфічних для краю обробки параметрів.
23. Спосіб за одним або більше пп. 12-22, який відрізняється тим, що визначені значення дальності та відповідні специфічні для краю обробки параметри розподіляють в пам'яті відповідно до їхнього абсолютного положення, тобто відповідно до координат глобальної супутникової системи радіовизначення, або відповідно до їхнього відносного положення, наприклад, відповідно до кута сканування.
Текст
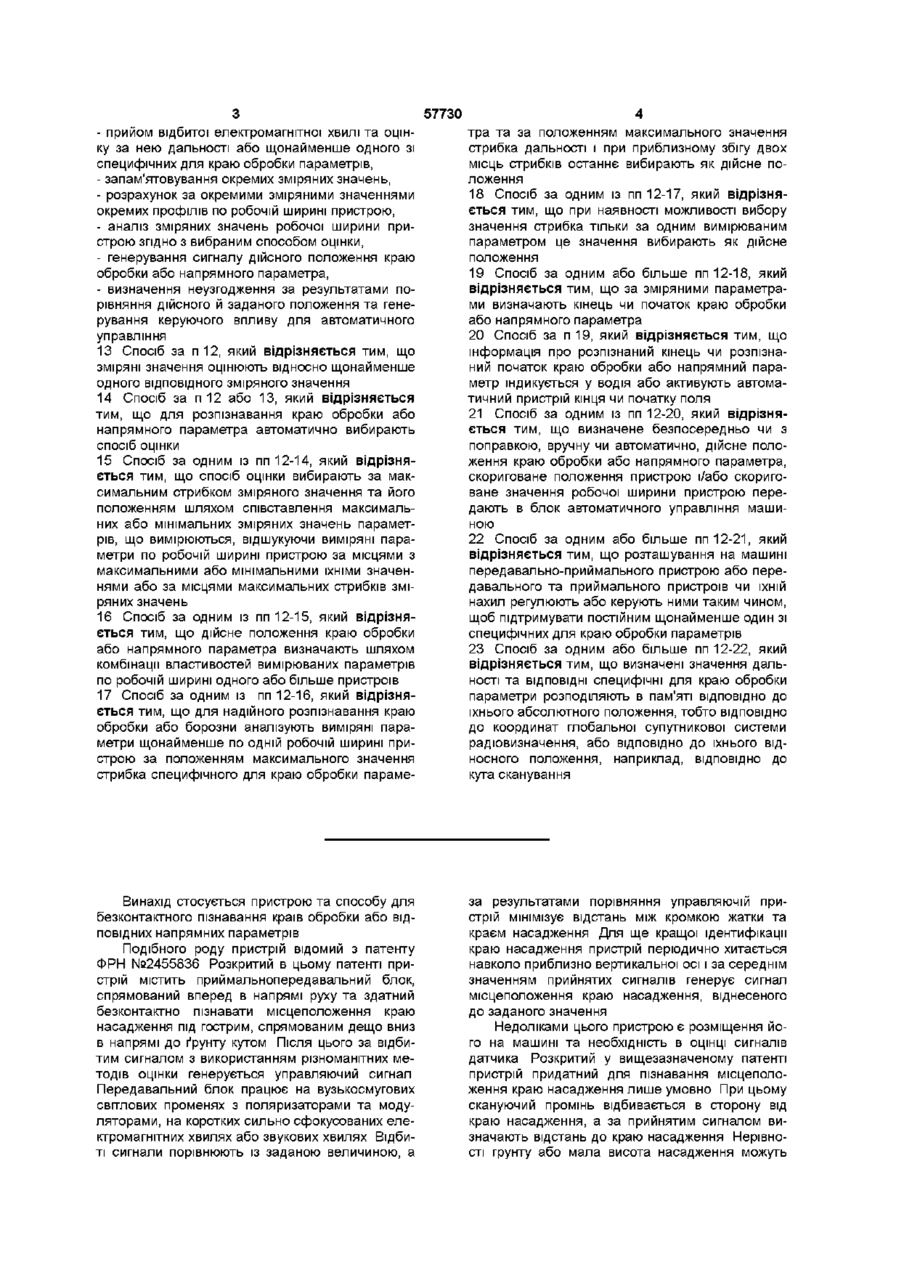
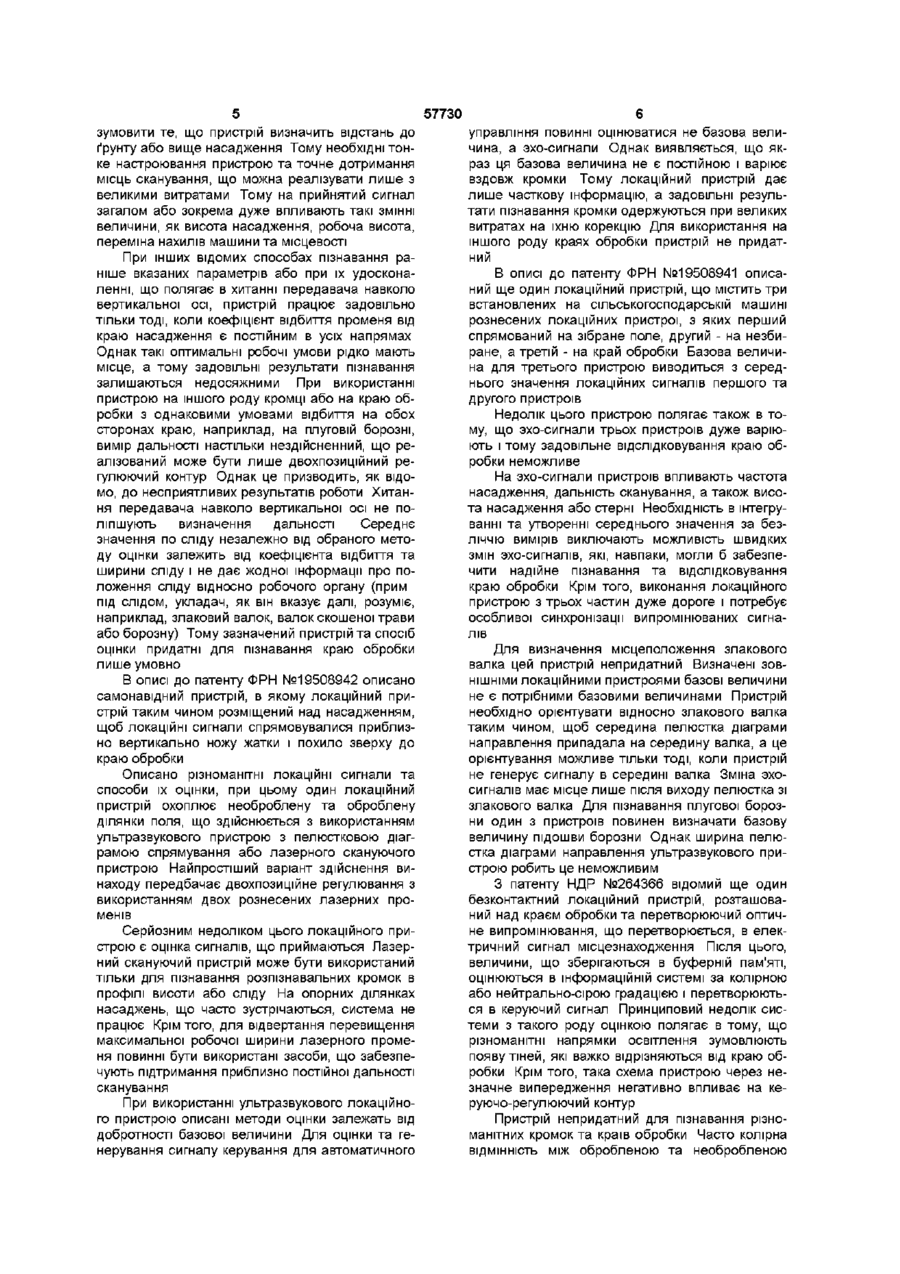
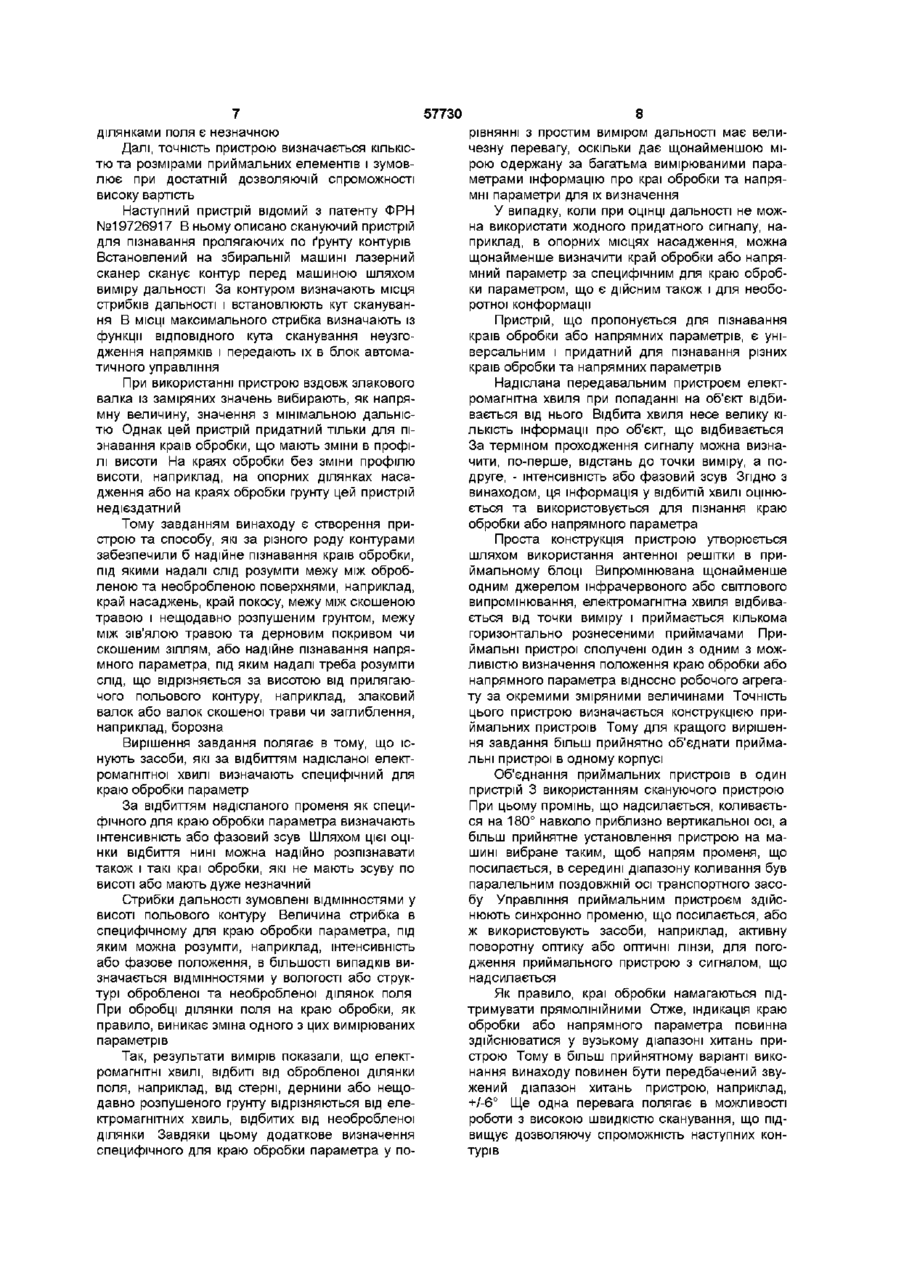
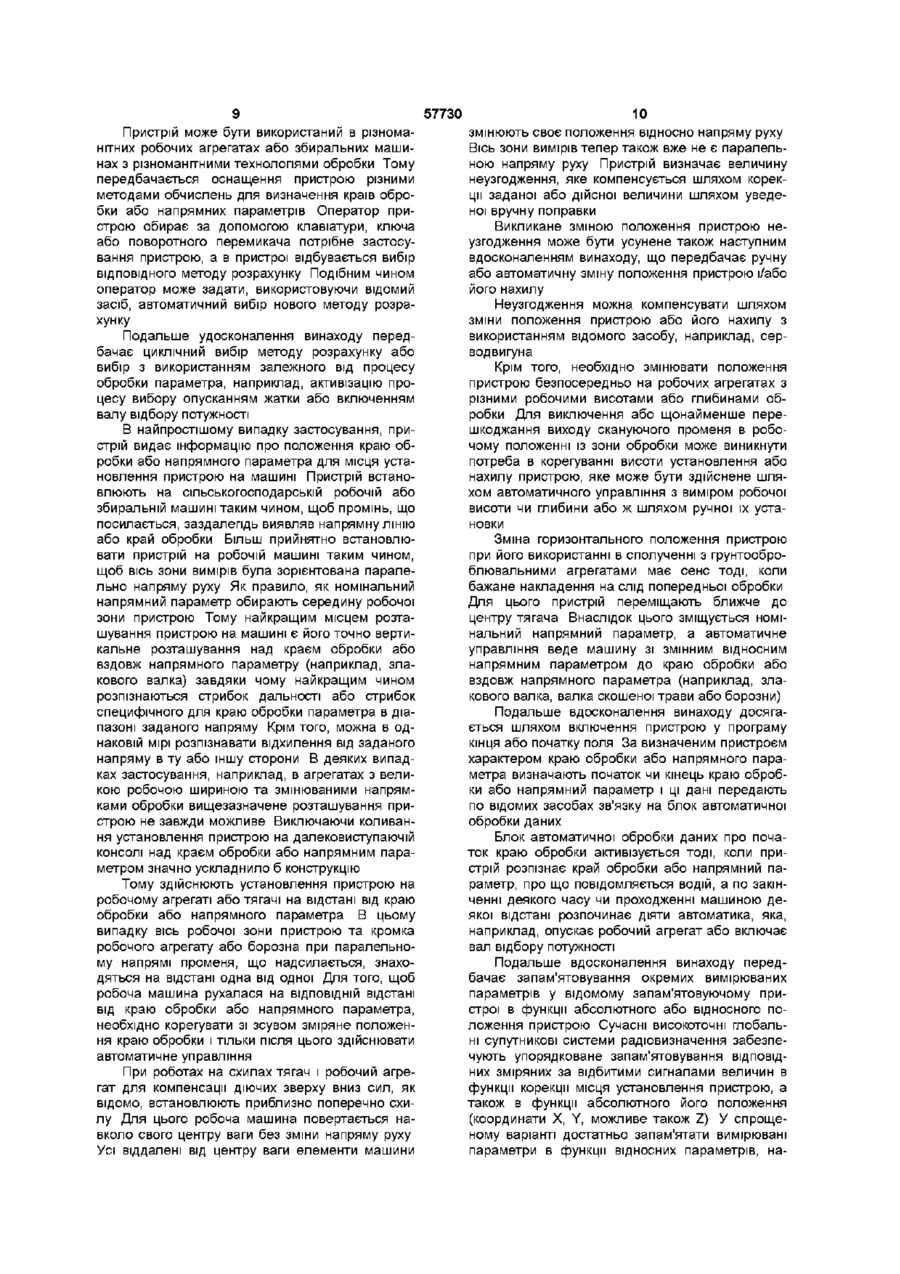
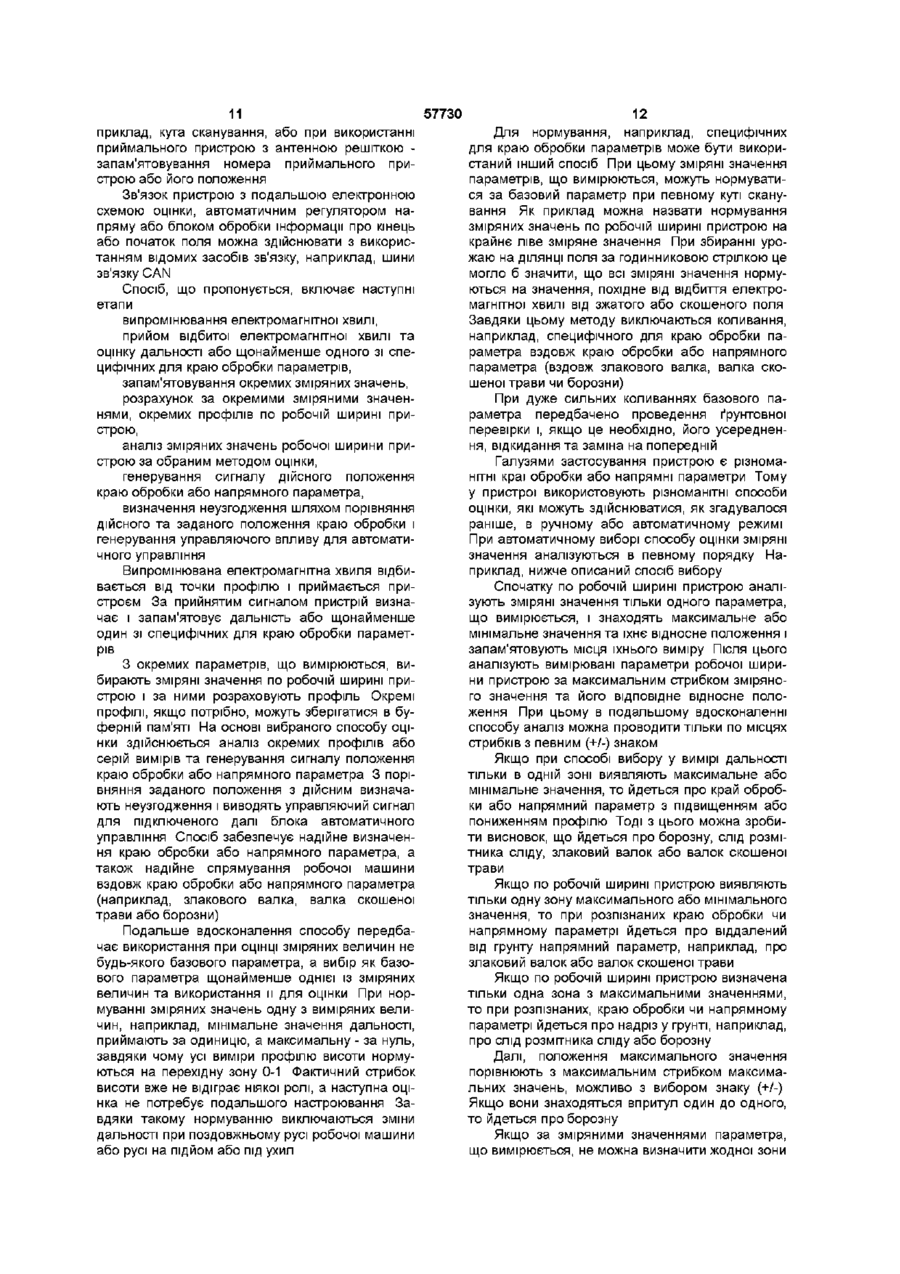
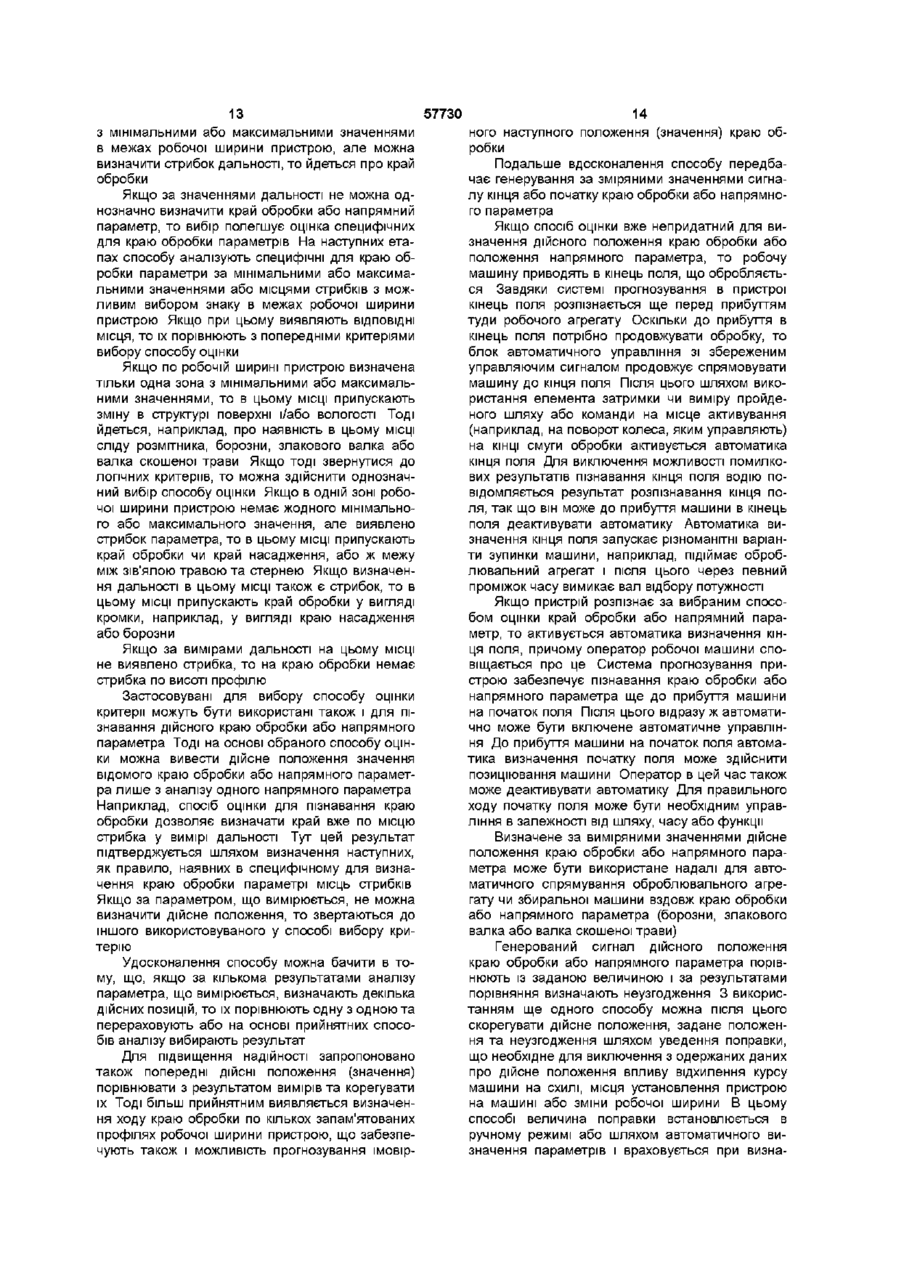
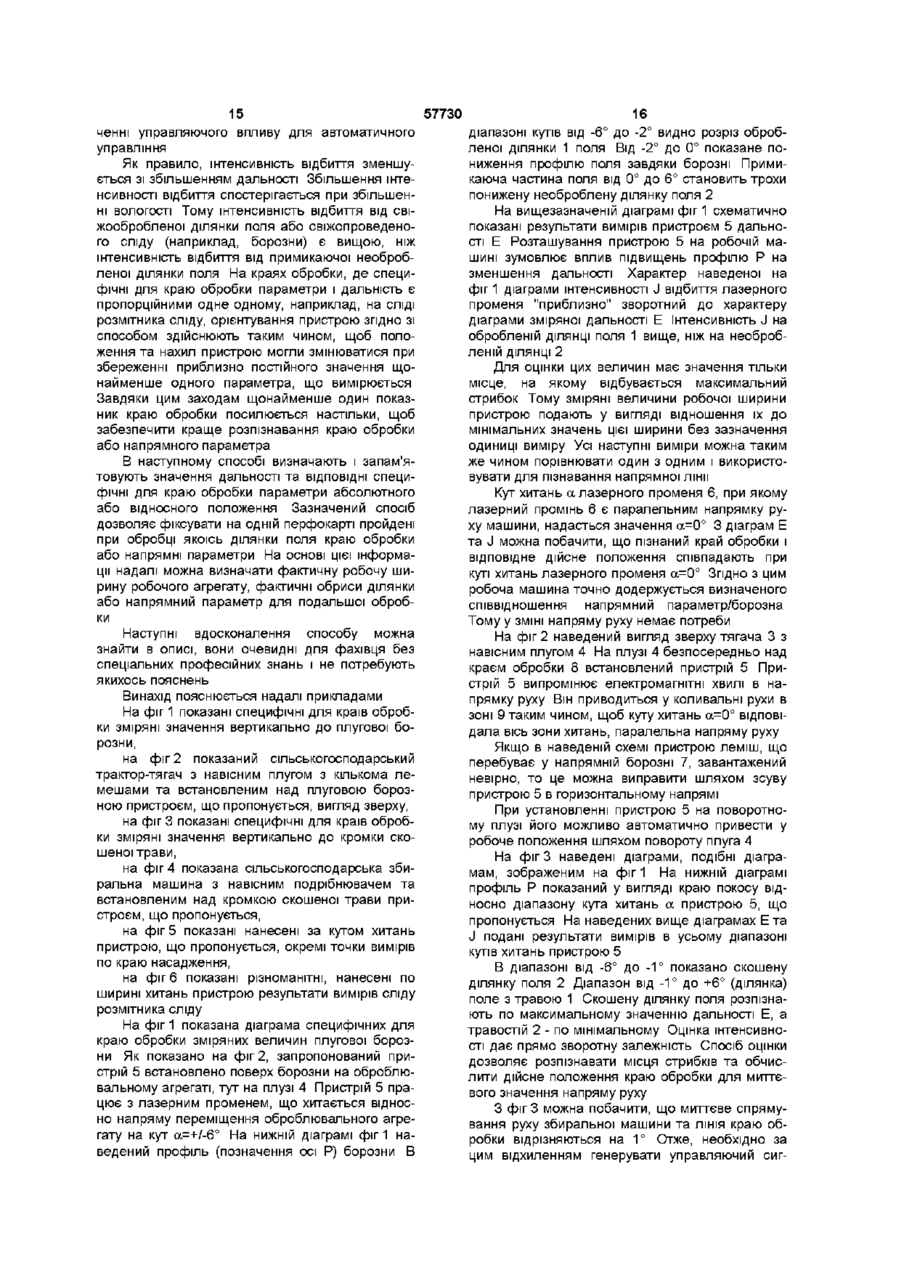
1 Пристрій для безконтаїсгного розпізнавання країв обробки або напрямних параметрів, зокрема для автоматичного спрямування сільськогосподарських робочих машин вздовж виробленого за попередній або інший робочий хід напрямного параметра, що визначає подальший або безпосередній етап обробки, який складається щонайменше з одного пристрою, встановленого над краєм обробки та має щонайменше один передавальний пристрій, який випромінює електромагнітні хвилі таким чином, що можна заздалегідь розпізнати краї обробки або напрямні параметри в робочому напрямку, та щонайменше один приймальний пристрій, оснащений засобом для визначення відстані до окремих точок відбиття електромагнітних хвиль, який відрізняється тим, що має засіб для визначення щонайменше одного специфічного для країв обробки параметра за відбиттям надісланої електромагнітної хвилі 2 Пристрій за п 1, який відрізняється тим, що як специфічний для країв обробки параметр за відбиттям електромагнітних хвиль вибрано інтенсивність 3 Пристрій за п 1 або 2, який відрізняється тим, що як специфічний для краю обробки параметр за відбиттям електромагнітних хвиль вибрано зсув по фазі 4 Пристрій за одним із пп 1-3, який відрізняється тим, що засіб для визначення щонайменше одного специфічного для країв обробки параметра за відбиттям надісланої електромагнітної хвилі має щонайменше один передавальний пристрій і один або більше приймальних пристроїв з антенною решіткою 5 Пристрій за одним із пп 1-4, який відрізняється тим, що передавальний або приймальний пристрій виконано у вигляді скануючого пристрою 6 Пристрій за одним із пп 1-5, який відрізняється тим, що робоча ширина пристрою має звужений кут сканування відносно осі зони хитань, наприклад, +/- 6° 7 Пристрій за одним із пп 1-6, який відрізняється тим, що має засіб для вибору в ручному або автоматичному режимі способу розрахунку для генерування сигналу краю обробки або напрямного параметра ВІДПОВІДНО ДО краю обробки 8 Пристрій за одним із пп 1-7, який відрізняється тим, що має засіб для передачі визначеного безпосередньо або з поправкою значення положення краю обробки або напрямного параметра в блок автоматичного управління машиною та ВІДПОВІДНОГО корегування значення положення пристрою і/або робочої ширини за допомогою різних засобів, наприклад, шинної системи машини 9 Пристрій за одним із пп 1-8, який відрізняється тим, що передавально-приймальний пристрій або передавальний та приймальний пристрої виконані з можливістю автоматичної чи ручної перестановки в горизонтальному і/або вертикальному положенні або щонайменше в похилому положенні 10 Пристрій за одним із пп 1-9, який відрізняється тим, що має засіб для пізнавання кінця чи початку поля або напрямного параметра, який виконано з можливістю передачі одержаних результатів водію та на блок автоматичного управління машиною, що передаються через відомий засіб на автоматичний пристрій кінця або початку поля 11 Пристрій за одним із пп 1-7, який відрізняється тим, що має пристрій, який виконано з можливістю запам'ятовування в робочій машині певних значень дальності та ВІДПОВІДНИХ специфічних для краю обробки параметрів в функції абсолютного положення, наприклад, в функції координат глобальної супутникової системи радювизначення або у функції відносного положення, наприклад, в функції кута сканування 12 Спосіб визначення краю обробки або напрямного параметра, що включає наступні операції - випромінювання електромагнітної хвилі, О о со 1 Ю 57730 - прийом відбитої електромагнітної хвилі та оцінку за нею дальності або щонайменше одного зі специфічних для краю обробки параметрів, - запам'ятовування окремих зміряних значень, - розрахунок за окремими зміряними значеннями окремих профілів по робочій ширині пристрою, - аналіз зміряних значень робочої ширини пристрою згідно з вибраним способом оцінки, - генерування сигналу дійсного положення краю обробки або напрямного параметра, - визначення неузгодження за результатами порівняння дійсного й заданого положення та генерування керуючого впливу для автоматичного управління 13 Спосіб за п 12, який відрізняється тим, що зміряні значення оцінюють відносно щонайменше одного ВІДПОВІДНОГО зміряного значення 14 Спосіб за п 12 або 13, який відрізняється тим, що для розпізнавання краю обробки або напрямного параметра автоматично вибирають спосіб оцінки 15 Спосіб за одним із пп 12-14, який відрізняється тим, що спосіб оцінки вибирають за максимальним стрибком зміряного значення та його положенням шляхом співставлення максимальних або мінімальних зміряних значень параметрів, що вимірюються, відшукуючи виміряні параметри по робочій ширині пристрою за місцями з максимальними або мінімальними їхніми значеннями або за місцями максимальних стрибків зміряних значень 16 Спосіб за одним із пп 12-15, який відрізняється тим, що дійсне положення краю обробки або напрямного параметра визначають шляхом комбінації властивостей вимірюваних параметрів по робочій ширині одного або більше пристроїв 17 Спосіб за одним із пп 12-16, який відрізняється тим, що для надійного розпізнавання краю обробки або борозни аналізують виміряні параметри щонайменше по одній робочій ширині пристрою за положенням максимального значення стрибка специфічного для краю обробки параме тра та за положенням максимального значення стрибка дальності і при приблизному збігу двох місць стрибків останнє вибирають як дійсне положення 18 Спосіб за одним із пп 12-17, який відрізняється тим, що при наявності можливості вибору значення стрибка тільки за одним вимірюваним параметром це значення вибирають як дійсне положення 19 Спосіб за одним або більше пп 12-18, який відрізняється тим, що за зміряними параметрами визначають кінець чи початок краю обробки або напрямного параметра 20 Спосіб за п 19, який відрізняється тим, що інформація про розпізнаний кінець чи розпізнаний початок краю обробки або напрямний параметр індикується у водія або активують автоматичний пристрій кінця чи початку поля 21 Спосіб за одним із пп 12-20, який відрізняється тим, що визначене безпосередньо чи з поправкою, вручну чи автоматично, дійсне положення краю обробки або напрямного параметра, скориговане положення пристрою і/або скориговане значення робочої ширини пристрою передають в блок автоматичного управління машиною 22 Спосіб за одним або більше пп 12-21, який відрізняється тим, що розташування на машині передавально-приймального пристрою або передавального та приймального пристроїв чи їхній нахил регулюють або керують ними таким чином, щоб підтримувати постійним щонайменше один зі специфічних для краю обробки параметрів 23 Спосіб за одним або більше пп 12-22, який відрізняється тим, що визначені значення дальності та ВІДПОВІДНІ специфічні для краю обробки параметри розподіляють в пам'яті ВІДПОВІДНО ДО їхнього абсолютного положення, тобто ВІДПОВІДНО до координат глобальної супутникової системи радювизначення, або ВІДПОВІДНО ДО їхнього відносного положення, наприклад, ВІДПОВІДНО ДО кута сканування Винахід стосується пристрою та способу для безконтактного пізнавання країв обробки або ВІДПОВІДНИХ напрямних параметрів Подібного роду пристрій відомий з патенту ФРН №2455836 Розкритий в цьому патенті пристрій містить приймальнопередавальний блок, спрямований вперед в напрямі руху та здатний безконтактно пізнавати місцеположення краю насадження під гострим, спрямованим дещо вниз в напрямі до ґрунту кутом Після цього за відбитим сигналом з використанням різноманітних методів оцінки генерується управляючий сигнал Передавальний блок працює на вузькосмугових світлових променях з поляризаторами та модуляторами, на коротких сильно сфокусованих електромагнітних хвилях або звукових хвилях Відбиті сигнали порівнюють із заданою величиною, а за результатами порівняння управляючій пристрій мінімізує відстань між кромкою жатки та краєм насадження Для ще кращої ідентифікації краю насадження пристрій періодично хитається навколо приблизно вертикальної осі і за середнім значенням прийнятих сигналів генерує сигнал місцеположення краю насадження, віднесеного до заданого значення Недоліками цього пристрою є розміщення його на машині та необхідність в ОЦІНЦІ сигналів датчика Розкритий у вищезазначеному патенті пристрій придатний для пізнавання місцеположення краю насадження лише умовно При цьому скануючий промінь відбивається в сторону від краю насадження, а за прийнятим сигналом визначають відстань до краю насадження Нерівності грунту або мала висота насадження можуть 57730 зумовити те, що пристрій визначить відстань до ґрунту або вище насадження Тому необхідні тонке настроювання пристрою та точне дотримання місць сканування, що можна реалізувати лише з великими витратами Тому на прийнятий сигнал загалом або зокрема дуже впливають такі ЗМІННІ величини, як висота насадження, робоча висота, переміна нахилів машини та місцевості При інших відомих способах пізнавання раніше вказаних параметрів або при їх удосконаленні, що полягає в хитанні передавача навколо вертикальної осі, пристрій працює задовільно тільки тоді, коли коефіцієнт відбиття променя від краю насадження є постійним в усіх напрямах Однак такі оптимальні робочі умови рідко мають місце, а тому задовільні результати пізнавання залишаються недосяжними При використанні пристрою на іншого роду кромці або на краю обробки з однаковими умовами відбиття на обох сторонах краю, наприклад, на плуговій борозні, вимір дальності настільки нездійсненний, що реалізований може бути лише двохпозиційний регулюючий контур Однак це призводить, як відомо, до несприятливих результатів роботи Хитання передавача навколо вертикальної осі не поліпшують визначення дальності Середнє значення по сліду незалежно від обраного методу оцінки залежить від коефіцієнта відбиття та ширини сліду і не дає жодної інформації про положення сліду відносно робочого органу (прим під слідом, укладач, як він вказує далі, розуміє, наприклад, злаковий валок, валок скошеної трави або борозну) Тому зазначений пристрій та спосіб оцінки придатні для пізнавання краю обробки лише умовно В описі до патенту ФРН №19508942 описано самонавідний пристрій, в якому локаційний пристрій таким чином розміщений над насадженням, щоб локаційні сигнали спрямовувалися приблизно вертикально ножу жатки і похило зверху до краю обробки Описано різноманітні локаційні сигнали та способи їх оцінки, при цьому один локаційний пристрій охоплює необроблену та оброблену ділянки поля, що здійснюється з використанням ультразвукового пристрою з пелюстковою діаграмою спрямування або лазерного скануючого пристрою Найпростіший варіант здійснення винаходу передбачає двохпозиційне регулювання з використанням двох рознесених лазерних променів Серйозним недоліком цього локаційного пристрою є оцінка сигналів, що приймаються Лазерний скануючий пристрій може бути використаний тільки для пізнавання розпізнавальних кромок в профілі висоти або сліду На опорних ділянках насаджень, що часто зустрічаються, система не працює Крім того, для відвертання перевищення максимальної робочої ширини лазерного променя повинні бути використані засоби, що забезпечують підтримання приблизно постійної дальності сканування При використанні ультразвукового локаційного пристрою описані методи оцінки залежать від добротності базової величини Для оцінки та генерування сигналу керування для автоматичного 6 управління повинні оцінюватися не базова величина, а эхо-сигнали Однак виявляється, що якраз ця базова величина не є постійною і варіює вздовж кромки Тому локаційний пристрій дає лише часткову інформацію, а задовільні результати пізнавання кромки одержуються при великих витратах на їхню корекцію Для використання на іншого роду краях обробки пристрій не придатний В описі до патенту ФРН №19508941 описаний ще один локаційний пристрій, що містить три встановлених на сільськогосподарській машині рознесених локаційних пристрої, з яких перший спрямований на зібране поле, другий - на незбиране, а третій - на край обробки Базова величина для третього пристрою виводиться з середнього значення локаційних сигналів першого та другого пристроїв Недолік цього пристрою полягає також в тому, що эхо-сигнали трьох пристроїв дуже варіюють і тому задовільне відслідковування краю обробки неможливе На эхо-сигнали пристроїв впливають частота насадження, дальність сканування, а також висота насадження або стерні Необхідність в інтегруванні та утворенні середнього значення за безліччю вимірів виключають можливість швидких змін зхо-сигналів, які, навпаки, могли б забезпечити надійне пізнавання та відслідковування краю обробки Крім того, виконання локаційного пристрою з трьох частин дуже дороге і потребує особливої синхронізації випромінюваних сигналів Для визначення місцеположення злакового валка цей пристрій непридатний Визначені ЗОВНІШНІМИ локаційними пристроями базові величини не є потрібними базовими величинами Пристрій необхідно орієнтувати відносно злакового валка таким чином, щоб середина пелюстка діаграми направлення припадала на середину валка, а це орієнтування можливе тільки тоді, коли пристрій не генерує сигналу в середині валка Зміна эхосигналів має місце лише після виходу пелюстка зі злакового валка Для пізнавання плугової борозни один з пристроїв повинен визначати базову величину підошви борозни Однак ширина пелюстка діаграми направлення ультразвукового пристрою робить це неможливим З патенту НДР №264366 відомий ще один безконтактний локаційний пристрій, розташований над краєм обробки та перетворюючий оптичне випромінювання, що перетворюється, в електричний сигнал місцезнаходження Після цього, величини, що зберігаються в буферній пам'яті, оцінюються в інформаційній системі за колірною або нейтрально-сірою градацією і перетворюються в керуючий сигнал Принциповий недолік системи з такого роду оцінкою полягає в тому, що різноманітні напрямки освітлення зумовлюють появу тіней, які важко відрізняються від краю обробки Крім того, така схема пристрою через незначне випередження негативно впливає на керуючо-регулюючий контур Пристрій непридатний для пізнавання різноманітних кромок та країв обробки Часто колірна ВІДМІННІСТЬ між обробленою та необробленою 57730 ділянками поля є незначною Далі, точність пристрою визначається КІЛЬКІСТЮ та розмірами приймальних елементів і зумовлює при достатній дозволяючій спроможності високу вартість Наступний пристрій відомий з патенту ФРН №19726917 В ньому описано скануючий пристрій для пізнавання пролягаючих по ґрунту контурів Встановлений на збиральній машині лазерний сканер сканує контур перед машиною шляхом виміру дальності За контуром визначають місця стрибків дальності і встановлюють кут сканування В МІСЦІ максимального стрибка визначають із функції ВІДПОВІДНОГО кута сканування неузгодження напрямків і передають їх в блок автоматичного управління При використанні пристрою вздовж злакового валка із заміряних значень вибирають, як напрямну величину, значення з мінімальною дальністю Однак цей пристрій придатний тільки для пізнавання країв обробки, що мають зміни в профілі висоти На краях обробки без зміни профілю висоти, наприклад, на опорних ділянках насадження або на краях обробки грунту цей пристрій недієздатний Тому завданням винаходу є створення пристрою та способу, які за різного роду контурами забезпечили б надійне пізнавання країв обробки, під якими надалі слід розуміти межу між обробленою та необробленою поверхнями, наприклад, край насаджень, край покосу, межу між скошеною травою і нещодавно розпушеним грунтом, межу між зів'ялою травою та дерновим покривом чи скошеним зіллям, або надійне пізнавання напрямного параметра, під яким надалі треба розуміти слід, що відрізняється за висотою від прилягаючого польового контуру, наприклад, злаковий валок або валок скошеної трави чи заглиблення, наприклад, борозна Вирішення завдання полягає в тому, що існують засоби, які за відбиттям надісланої електромагнітної хвилі визначають специфічний для краю обробки параметр За відбиттям надісланого променя як специфічного для краю обробки параметра визначають інтенсивність або фазовий зсув Шляхом цієї оцінки відбиття нині можна надійно розпізнавати також і такі краї обробки, які не мають зсуву по висоті або мають дуже незначний Стрибки дальності зумовлені ВІДМІННОСТЯМИ у ВИСОТІ польового контуру Величина стрибка в специфічному для краю обробки параметра, під яким можна розуміти, наприклад, інтенсивність або фазове положення, в більшості випадків визначається ВІДМІННОСТЯМИ у вологості або структурі обробленої та необробленої ділянок поля При обробці ділянки поля на краю обробки, як правило, виникає зміна одного з цих вимірюваних параметрів Так, результати вимірів показали, що електромагнітні хвилі, відбиті від обробленої ділянки поля, наприклад, від стерні, дернини або нещодавно розпушеного грунту відрізняються від електромагнітних хвиль, відбитих від необробленої ділянки Завдяки цьому додаткове визначення специфічного для краю обробки параметра у по 8 рівнянні з простим виміром дальності має величезну перевагу, оскільки дає щонайменшою мірою одержану за багатьма вимірюваними параметрами інформацію про краї обробки та напрямні параметри для їх визначення У випадку, коли при ОЦІНЦІ дальності не можна використати жодного придатного сигналу, наприклад, в опорних місцях насадження, можна щонайменше визначити край обробки або напрямний параметр за специфічним для краю обробки параметром, що є дійсним також і для необоротної конформації Пристрій, що пропонується для пізнавання країв обробки або напрямних параметрів, є універсальним і придатний для пізнавання різних країв обробки та напрямних параметрів Надіслана передавальним пристроєм електромагнітна хвиля при попаданні на об'єкт відбивається від нього Відбита хвиля несе велику КІЛЬКІСТЬ інформації про об'єкт, що відбивається За терміном проходження сигналу можна визначити, по-перше, відстань до точки виміру, а подруге, - інтенсивність абофазовий зсув Згідно з винаходом, ця інформація у відбитій хвилі оцінюється та використовується для пізнання краю обробки або напрямного параметра Проста конструкція пристрою утворюється шляхом використання антенної решітки в приймальному блоці Випромінювана щонайменше одним джерелом інфрачервоного або світлового випромінювання, електромагнітна хвиля відбивається від точки виміру і приймається кількома горизонтально рознесеними приймачами Приймальні пристрої сполучені один з одним з можливістю визначення положення краю обробки або напрямного параметра відносно робочого агрегату за окремими зміряними величинами Точність цього пристрою визначається конструкцією приймальних пристроїв Тому для кращого вирішення завдання більш прийнятно об'єднати приймальні пристрої в одному корпусі Об'єднання приймальних пристроїв в один пристрій 3 використанням скануючого пристрою При цьому промінь, що надсилається, коливається на 180° навколо приблизно вертикальної осі, а більш прийнятне установлення пристрою на машині вибране таким, щоб напрям променя, що посилається, в середині діапазону коливання був паралельним поздовжній осі транспортного засобу Управління приймальним пристроєм здійснюють синхронно променю, що посилається, або ж використовують засоби, наприклад, активну поворотну оптику або оптичні лінзи, для погодження приймального пристрою з сигналом, що надсилається Як правило, краї обробки намагаються підтримувати прямолінійними Отже, індикація краю обробки або напрямного параметра повинна здійснюватися у вузькому діапазоні хитань пристрою Тому в більш прийнятному варіанті виконання винаходу повинен бути передбачений звужений діапазон хитань пристрою, наприклад, +/-6° Ще одна перевага полягає в можливості роботи з високою швидкістю сканування, що підвищує дозволяючу спроможність наступних контурів 57730 Пристрій може бути використаний в різноманітних робочих агрегатах або збиральних машинах з різноманітними технологіями обробки Тому передбачається оснащення пристрою різними методами обчислень для визначення країв обробки або напрямних параметрів Оператор пристрою обирає за допомогою клавіатури, ключа або поворотного перемикача потрібне застосування пристрою, а в пристрої відбувається вибір ВІДПОВІДНОГО методу розрахунку Подібним чином оператор може задати, використовуючи відомий засіб, автоматичний вибір нового методу розрахунку Подальше удосконалення винаходу передбачає циклічний вибір методу розрахунку або вибір з використанням залежного від процесу обробки параметра, наприклад, активізацію процесу вибору опусканням жатки або включенням валу відбору потужності В найпростішому випадку застосування, пристрій видає інформацію про положення краю обробки або напрямного параметра для місця установлення пристрою на машині Пристрій встановлюють на сільськогосподарській робочій або збиральній машині таким чином, щоб промінь, що посилається, заздалегідь виявляв напрямну ЛІНІЮ або край обробки Більш прийнятно встановлювати пристрій на робочій машині таким чином, щоб вісь зони вимірів була зорієнтована паралельно напряму руху Як правило, як номінальний напрямний параметр обирають середину робочої зони пристрою Тому найкращим місцем розташування пристрою на машині є його точно вертикальне розташування над краєм обробки або вздовж напрямного параметру (наприклад, злакового валка) завдяки чому найкращим чином розпізнаються стрибок дальності або стрибок специфічного для краю обробки параметра в діапазоні заданого напряму Крім того, можна в однаковій мірі розпізнавати відхилення від заданого напряму в ту або іншу сторони В деяких випадках застосування, наприклад, в агрегатах з великою робочою шириною та змінюваними напрямками обробки вищезазначене розташування пристрою не завжди можливе Виключаючи коливання установлення пристрою на далековиступаючій консолі над краєм обробки або напрямним параметром значно ускладнило б конструкцію Тому здійснюють установлення пристрою на робочому агрегаті або тягачі на відстані від краю обробки або напрямного параметра В цьому випадку вісь робочої зони пристрою та кромка робочого агрегату або борозна при паралельному напрямі променя, що надсилається, знаходяться на відстані одна від одної Для того, щоб робоча машина рухалася на ВІДПОВІДНІЙ відстані від краю обробки або напрямного параметра, необхідно корегувати зі зсувом зміряне положення краю обробки і тільки після цього здійснювати автоматичне управління При роботах на схилах тягач і робочий агрегат для компенсації діючих зверху вниз сил, як відомо, встановлюють приблизно поперечно схилу Для цього робоча машина повертається навколо свого центру ваги без зміни напряму руху Усі віддалені від центру ваги елементи машини 10 змінюють своє положення відносно напряму руху Вісь ЗОНИ вимірів тепер також вже не є паралельною напряму руху Пристрій визначає величину неузгодження, яке компенсується шляхом корекції заданої або дійсної величини шляхом уведеної вручну поправки Викликане зміною положення пристрою неузгодження може бути усунене також наступним вдосконаленням винаходу, що передбачає ручну або автоматичну зміну положення пристрою і/або його нахилу Неузгодження можна компенсувати шляхом зміни положення пристрою або його нахилу з використанням відомого засобу, наприклад, серводвигуна Крім того, необхідно змінювати положення пристрою безпосередньо на робочих агрегатах з різними робочими висотами або глибинами обробки Для виключення або щонайменше перешкоджання виходу скануючого променя в робочому положенні із зони обробки може виникнути потреба в корегуванні висоти установлення або нахилу пристрою, яке може бути здійснене шляхом автоматичного управління з виміром робочої висоти чи глибини або ж шляхом ручної їх установки Зміна горизонтального положення пристрою при його використанні в сполученні з грунтооброблювальними агрегатами має сенс тоді, коли бажане накладення на слід попередньої обробки Для цього пристрій переміщають ближче до центру тягача Внаслідок цього зміщується номінальний напрямний параметр, а автоматичне управління веде машину зі змінним відносним напрямним параметром до краю обробки або вздовж напрямного параметра (наприклад, злакового валка, валка скошеної трави або борозни) Подальше вдосконалення винаходу досягається шляхом включення пристрою у програму кінця або початку поля За визначеним пристроєм характером краю обробки або напрямного параметра визначають початок чи кінець краю обробки або напрямний параметр і ці дані передають по відомих засобах зв'язку на блок автоматичної обробки даних Блок автоматичної обробки даних про початок краю обробки активізується тоді, коли пристрій розпізнає край обробки або напрямний параметр, про що повідомляється водій, а по закінченні деякого часу чи проходженні машиною деякої відстані розпочинає діяти автоматика, яка, наприклад, опускає робочий агрегат або включає вал відбору потужності Подальше вдосконалення винаходу передбачає запам'ятовування окремих вимірюваних параметрів у відомому запам'ятовуючому пристрої в функції абсолютного або відносного положення пристрою Сучасні високоточні глобальні супутникові системи радювизначення забезпечують упорядковане запам'ятовування ВІДПОВІДНИХ зміряних за відбитими сигналами величин в функції корекції місця установлення пристрою, а також в функції абсолютного його положення (координати X, Y, можливе також Z) У спрощеному варіанті достатньо запам'ятати вимірювані параметри в функції відносних параметрів, на 57730 12 11 приклад, кута сканування, або при використанні Для нормування, наприклад, специфічних приймального пристрою з антенною решіткою для краю обробки параметрів може бути викоризапам'ятовування номера приймального пристаний інший спосіб При цьому зміряні значення строю або його положення параметрів, що вимірюються, можуть нормуватися за базовий параметр при певному куті скануЗв'язок пристрою з подальшою електронною вання Як приклад можна назвати нормування схемою оцінки, автоматичним регулятором назміряних значень по робочій ширині пристрою на пряму або блоком обробки інформації про кінець крайнє ліве зміряне значення При збиранні уроабо початок поля можна здійснювати з викорисжаю на ДІЛЯНЦІ поля за годинниковою стрілкою це танням відомих засобів зв'язку, наприклад, шини могло б значити, що всі зміряні значення нормузв'язку CAN ються на значення, похідне від відбиття електроСпосіб, що пропонується, включає наступні магнітної хвилі від зжатого або скошеного поля етапи Завдяки цьому методу виключаються коливання, випромінювання електромагнітної хвилі, наприклад, специфічного для краю обробки паприйом відбитої електромагнітної хвилі та раметра вздовж краю обробки або напрямного оцінку дальності або щонайменше одного зі спепараметра (вздовж злакового валка, валка скоцифічних для краю обробки параметрів, шеної трави чи борозни) запам'ятовування окремих зміряних значень, розрахунок за окремими зміряними значенПри дуже сильних коливаннях базового панями, окремих профілів по робочій ширині прираметра передбачено проведення ґрунтовної строю, перевірки і, якщо це необхідно, його усереднення, відкидання та заміна на попередній аналіз зміряних значень робочої ширини пристрою за обраним методом оцінки, Галузями застосування пристрою є різномагенерування сигналу дійсного положення нітні краї обробки або напрямні параметри Тому краю обробки або напрямного параметра, у пристрої використовують різноманітні способи оцінки, які можуть здійснюватися, як згадувалося визначення неузгодження шляхом порівняння раніше, в ручному або автоматичному режимі дійсного та заданого положення краю обробки і При автоматичному виборі способу оцінки зміряні генерування управляючого впливу для автоматизначення аналізуються в певному порядку Начного управління приклад, нижче описаний спосіб вибору Випромінювана електромагнітна хвиля відбивається від точки профілю і приймається приСпочатку по робочій ширині пристрою аналістроєм За прийнятим сигналом пристрій визназують зміряні значення тільки одного параметра, чає і запам'ятовує дальність або щонайменше що вимірюється, і знаходять максимальне або один зі специфічних для краю обробки параметмінімальне значення та їхнє відносне положення і рів запам'ятовують місця їхнього виміру Після цього аналізують вимірювані параметри робочої шириЗ окремих параметрів, що вимірюються, вини пристрою за максимальним стрибком змірянобирають зміряні значення по робочій ширині приго значення та його відповідне відносне полострою і за ними розраховують профіль Окремі ження При цьому в подальшому вдосконаленні профілі, якщо потрібно, можуть зберігатися в буспособу аналіз можна проводити тільки по місцях ферній пам'яті На основі вибраного способу оцістрибків з певним (+/-) знаком нки здійснюється аналіз окремих профілів або серій вимірів та генерування сигналу положення Якщо при способі вибору у вимірі дальності краю обробки або напрямного параметра 3 порітільки в одній зоні виявляють максимальне або вняння заданого положення з дійсним визначамінімальне значення, то йдеться про край обробють неузгодження і виводять управляючий сигнал ки або напрямний параметр з підвищенням або для підключеного далі блока автоматичного пониженням профілю Тоді З ЦЬОГО можна зробиуправління Спосіб забезпечує надійне визначенти висновок, що йдеться про борозну, слід розміня краю обробки або напрямного параметра, а тника сліду, злаковий валок або валок скошеної також надійне спрямування робочої машини трави вздовж краю обробки або напрямного параметра Якщо по робочій ширині пристрою виявляють (наприклад, злакового валка, валка скошеної тільки одну зону максимального або мінімального трави або борозни) значення, то при розпізнаних краю обробки чи напрямному параметрі йдеться про віддалений Подальше вдосконалення способу передбавід грунту напрямний параметр, наприклад, про чає використання при ОЦІНЦІ зміряних величин не злаковий валок або валок скошеної трави будь-якого базового параметра, а вибір як базового параметра щонайменше однієї із зміряних Якщо по робочій ширині пристрою визначена величин та використання и для оцінки При нортільки одна зона з максимальними значеннями, муванні зміряних значень одну з виміряних велито при розпізнаних, краю обробки чи напрямному чин, наприклад, мінімальне значення дальності, параметрі йдеться про надріз у грунті, наприклад, приймають за одиницю, а максимальну - за нуль, про слід розмітника сліду або борозну завдяки чому усі виміри профілю висоти нормуДалі, положення максимального значення ються на перехідну зону 0-1 Фактичний стрибок порівнюють з максимальним стрибком максимависоти вже не відіграє ніякої ролі, а наступна оцільних значень, можливо з вибором знаку (+/-) нка не потребує подальшого настроювання ЗаЯкщо вони знаходяться впритул один до одного, вдяки такому нормуванню виключаються зміни то йдеться про борозну дальності при поздовжньому русі робочої машини Якщо за зміряними значеннями параметра, або русі на підйом або під ухил що вимірюється, не можна визначити жодної зони 57730 14 13 з мінімальними або максимальними значеннями ного наступного положення (значення) краю обв межах робочої ширини пристрою, але можна робки визначити стрибок дальності, то йдеться про край Подальше вдосконалення способу передбаобробки чає генерування за зміряними значеннями сигналу кінця або початку краю обробки або напрямноЯкщо за значеннями дальності не можна одго параметра нозначно визначити край обробки або напрямний параметр, то вибір полегшує оцінка специфічних Якщо спосіб оцінки вже непридатний для видля краю обробки параметрів На наступних етазначення дійсного положення краю обробки або пах способу аналізують специфічні для краю обположення напрямного параметра, то робочу робки параметри за мінімальними або максимамашину приводять в кінець поля, що обробляєтьльними значеннями або місцями стрибків з можся Завдяки системі прогнозування в пристрої ливим вибором знаку в межах робочої ширини кінець поля розпізнається ще перед прибуттям пристрою Якщо при цьому виявляють ВІДПОВІДНІ туди робочого агрегату Оскільки до прибуття в місця, то їх порівнюють з попередніми критеріями кінець поля потрібно продовжувати обробку, то вибору способу оцінки блок автоматичного управління зі збереженим управляючим сигналом продовжує спрямовувати Якщо по робочій ширині пристрою визначена машину до кінця поля Після цього шляхом викотільки одна зона з мінімальними або максимальристання елемента затримки чи виміру пройденими значеннями, то в цьому МІСЦІ припускають ного шляху або команди на місце активування зміну в структурі поверхні і/або вологості Тоді (наприклад, на поворот колеса, яким управляють) йдеться, наприклад, про наявність в цьому МІСЦІ на КІНЦІ смуги обробки активується автоматика сліду розмітника, борозни, злакового валка або кінця поля Для виключення можливості помилковалка скошеної трави Якщо тоді звернутися до вих результатів пізнавання кінця поля водію пологічних критеріїв, то можна здійснити однозначвідомляється результат розпізнавання кінця поний вибір способу оцінки Якщо в одній зоні роболя, так що він може до прибуття машини в кінець чої ширини пристрою немає жодного мінімальнополя деактивувати автоматику Автоматика виго або максимального значення, але виявлено значення кінця поля запускає різноманітні варіанстрибок параметра, то в цьому МІСЦІ припускають ти зупинки машини, наприклад, підіймає обробкрай обробки чи край насадження, або ж межу лювальний агрегат і після цього через певний між зів'ялою травою та стернею Якщо визначенпроміжок часу вимикає вал відбору потужності ня дальності в цьому МІСЦІ також є стрибок, то в цьому МІСЦІ припускають край обробки у вигляді Якщо пристрій розпізнає за вибраним спосокромки, наприклад, у вигляді краю насадження бом оцінки край обробки або напрямний параабо борозни метр, то активується автоматика визначення кінця поля, причому оператор робочої машини споЯкщо за вимірами дальності на цьому МІСЦІ віщається про це Система прогнозування прине виявлено стрибка, то на краю обробки немає строю забезпечує пізнавання краю обробки або стрибка по висоті профілю напрямного параметра ще до прибуття машини Застосовувані для вибору способу оцінки на початок поля Після цього відразу ж автоматикритерії можуть бути використані також і для пічно може бути включене автоматичне управлінзнавання дійсного краю обробки або напрямного ня До прибуття машини на початок поля автомапараметра Тоді на основі обраного способу оцінтика визначення початку поля може здійснити ки можна вивести дійсне положення значення позиціювання машини Оператор в цей час також відомого краю обробки або напрямного параметможе деактивувати автоматику Для правильного ра лише з аналізу одного напрямного параметра ходу початку поля може бути необхідним управНаприклад, спосіб оцінки для пізнавання краю ління в залежності від шляху, часу або функції обробки дозволяє визначати край вже по місцю стрибка у вимірі дальності Тут цей результат Визначене за виміряними значеннями дійсне підтверджується шляхом визначення наступних, положення краю обробки або напрямного параяк правило, наявних в специфічному для визнаметра може бути використане надалі для авточення краю обробки параметрі місць стрибків матичного спрямування оброблювального агреЯкщо за параметром, що вимірюється, не можна гату чи збиральної машини вздовж краю обробки визначити дійсне положення, то звертаються до або напрямного параметра (борозни, злакового іншого використовуваного у способі вибору кривалка або валка скошеної трави) терію Генерований сигнал дійсного положення краю обробки або напрямного параметра порівУдосконалення способу можна бачити в тонюють із заданою величиною і за результатами му, що, якщо за кількома результатами аналізу порівняння визначають неузгодження 3 викориспараметра, що вимірюється, визначають декілька танням ще одного способу можна після цього дійсних позицій, то їх порівнюють одну з одною та скорегувати дійсне положення, задане положенперераховують або на основі прийнятних спосоня та неузгодження шляхом уведення поправки, бів аналізу вибирають результат що необхідне для виключення з одержаних даних Для підвищення надійності запропоновано про дійсне положення впливу відхилення курсу також попередні ДІЙСНІ положення (значення) машини на схилі, місця установлення пристрою порівнювати з результатом вимірів та корегувати на машині або зміни робочої ширини В цьому їх Тоді більш прийнятним виявляється визначенспособі величина поправки встановлюється в ня ходу краю обробки по кількох запам'ятованих ручному режимі або шляхом автоматичного випрофілях робочої ширини пристрою, що забезпезначення параметрів і враховується при визначують також і можливість прогнозування імовір 57730 15 ченні управляючого впливу для автоматичного управління Як правило, інтенсивність відбиття зменшується зі збільшенням дальності Збільшення інтенсивності відбиття спостерігається при збільшенні вологості Тому інтенсивність відбиття від свіжообробленої ділянки поля або свіжопроведеного сліду (наприклад, борозни) є вищою, ніж інтенсивність відбиття від примикаючої необробленої ділянки поля На краях обробки, де специфічні для краю обробки параметри і дальність є пропорційними одне одному, наприклад, на СЛІДІ розмітника сліду, орієнтування пристрою згідно зі способом здійснюють таким чином, щоб положення та нахил пристрою могли змінюватися при збереженні приблизно постійного значення щонайменше одного параметра, що вимірюється Завдяки цим заходам щонайменше один показник краю обробки посилюється настільки, щоб забезпечити краще розпізнавання краю обробки або напрямного параметра В наступному способі визначають і запам'ятовують значення дальності та ВІДПОВІДНІ специ фічні для краю обробки параметри абсолютного або відносного положення Зазначений спосіб дозволяє фіксувати на одній перфокарті пройдені при обробці якоїсь ділянки поля краю обробки або напрямні параметри На основі цієї інформації надалі можна визначати фактичну робочу ширину робочого агрегату, фактичні обриси ділянки або напрямний параметр для подальшої обробки Наступні вдосконалення способу можна знайти в описі, вони очевидні для фахівця без спеціальних професійних знань і не потребують якихось пояснень Винахід пояснюється надалі прикладами На фіг 1 показані специфічні для країв обробки зміряні значення вертикально до плугової борозни, на фіг 2 показаний сільськогосподарський трактор-тягач з навісним плугом з кількома лемешами та встановленим над плуговою борозною пристроєм, що пропонується, вигляд зверху, на фіг 3 показані специфічні для країв обробки зміряні значення вертикально до кромки скошеної трави, на фіг 4 показана сільськогосподарська збиральна машина з навісним подрібнювачем та встановленим над кромкою скошеної трави пристроєм, що пропонується, на фіг 5 показані нанесені за кутом хитань пристрою, що пропонується, окремі точки вимірів по краю насадження, на фіг 6 показані різноманітні, нанесені по ширині хитань пристрою результати вимірів сліду розмітника сліду На фіг 1 показана діаграма специфічних для краю обробки зміряних величин плугової борозни Як показано на фіг 2, запропонований пристрій 5 встановлено поверх борозни на оброблювальному агрегаті, тут на плузі 4 Пристрій 5 працює з лазерним променем, що хитається відносно напряму переміщення оброблювального агрегату на кут а=+/-6° На нижній діаграмі фіг 1 наведений профіль (позначення осі Р) борозни В 16 діапазоні кутів від -6° до -2° видно розріз обробленої ділянки 1 поля Від -2° до 0° показане пониження профілю поля завдяки борозні Примикаюча частина поля від 0° до 6° становить трохи понижену необроблену ділянку поля 2 На вищезазначеній діаграмі фіг 1 схематично показані результати вимірів пристроєм 5 дальності Е Розташування пристрою 5 на робочій машині зумовлює вплив підвищень профілю Р на зменшення дальності Характер наведеної на фіг 1 діаграми інтенсивності J відбиття лазерного променя "приблизно" зворотний до характеру діаграми зміряної дальності Е Інтенсивність J на обробленій ДІЛЯНЦІ поля 1 вище, ніж на необробленій ДІЛЯНЦІ 2 Для оцінки цих величин має значення тільки місце, на якому відбувається максимальний стрибок Тому зміряні величини робочої ширини пристрою подають у вигляді відношення їх до мінімальних значень цієї ширини без зазначення одиниці виміру Усі наступні виміри можна таким же чином порівнювати один з одним і використовувати для пізнавання напрямної лінії Кут хитань а лазерного променя 6, при якому лазерний промінь 6 є паралельним напрямку руху машини, надасться значення а=0° 3 діаграм Е та J можна побачити, що пізнаний край обробки і відповідне дійсне положення співпадають при куті хитань лазерного променя а=0° Згідно з цим робоча машина точно додержується визначеного співвідношення напрямний параметр/борозна Тому у ЗМІНІ напряму руху немає потреби На фіг 2 наведений вигляд зверху тягача 3 з навісним плугом 4 На плузі 4 безпосередньо над краєм обробки 8 встановлений пристрій 5 Пристрій 5 випромінює електромагнітні хвилі в напрямку руху Він приводиться у коливальні рухи в зоні Этаким чином, щоб куту хитань а=0° відповідала вісь зони хитань, паралельна напряму руху Якщо в наведеній схемі пристрою леміш, що перебуває у напрямній борозні 7, завантажений невірно, то це можна виправити шляхом зсуву пристрою 5 в горизонтальному напрямі При установленні пристрою 5 на поворотному плузі його можливо автоматично привести у робоче положення шляхом повороту плуга 4 На фіг 3 наведені діаграми, подібні діаграмам, зображеним на фіг 1 На нижній діаграмі профіль Р показаний у вигляді краю покосу відносно діапазону кута хитань а пристрою 5, що пропонується На наведених вище діаграмах Е та J подані результати вимірів в усьому діапазоні кутів хитань пристрою 5 В діапазоні від -6° до -1° показано скошену ділянку поля 2 Діапазон від -1° до +6° (ділянка) поле з травою 1 Скошену ділянку поля розпізнають по максимальному значенню дальності Е, а травостій 2 - по мінімальному Оцінка інтенсивності дає прямо зворотну залежність Спосіб оцінки дозволяє розпізнавати місця стрибків та обчислити дійсне положення краю обробки для миттєвого значення напряму руху З фіг 3 можна побачити, що миттєве спрямування руху збиральної машини та ЛІНІЯ краю обробки відрізняються на 1° Отже, необхідно за цим відхиленням генерувати управляючий сиг 57730 18 17 нал, що забезпечує повернення робочої машини обробки знаходиться тут в МІСЦІ розриву 13 крина заданий курс вої зміряних значень при куті хитань біля -2,8° На фіг 4 показаний вигляд зверху робочої На фіг 6 на одній діаграмі наведено багато машини 10 в процесі її роботи На жатці 11 лівозміряних по робочій ширині пристрою 5 значень руч встановлений пристрій 5, що пропонується двох специфічних для краю обробки параметрів, Електромагнітні хвилі у вигляді лазерного промещо вимірюються На одній кривій показані дальня 6 здійснюють хитання відносно напряму руху ність Е, а на другий - інтенсивність J для кожної машини перед жаткою 11 над краєм обробки точки виміру в функції кута хитання а Обидві Місце установлення пристрою 5 на жатці 11 вибкриві мають аналогічний характер Обидві криві ране таким, щоб середина робочої ширини призміряних значень мають максимум при куті хистрою 5 при необхідному завантаженні жатки тань а=1°, з чого витікає, що тут йдеться про слід точно співпадала з краєм обробки розмітника сліду на необробленій ДІЛЯНЦІ ПОЛЯ Пониження цього сліду збільшує значення дальНа фіг 5 параметр, що вимірюється, (тут даності Е На тому ж МІСЦІ за відбитим сигналом льність) поданий окремими зміряними значеннявизначають більш високу інтенсивність, що поясми 12, причому значення дальності Е відповідає нюється більш високою вологістю в СЛІДІ розміткуту хитань а Шляхом інтерполяції зміряних знаника сліду чень 12 одержують криву вимірів в усьому діапазоні хитань 9 пристрою 5 Похідна дальності Е за Комбінація окремих параметрів, що вимірюкутом хитань дозволяє оцінити відносне полоються, зумовлює також можливість більш надійження максимального стрибка зміряних значень ного пізнавання напрямного сліду навіть при таабо краю обробки для встановлення напряму кому характері кривих, які важко піддавати аналіруху збиральної машини На цій фігурі показані зу Наприклад, тут обидві криві мають максимум результати вимірів дальності Е по всьому діапав одній і тій самій точці зону хитань пристрою 5 на краю покосу Край Фіг. 2 Фіг 4 19 57730 Фіг. 5 Комп'ютерна верстка Е Гапоненко Фіг. 6 Підписано до друку 05 08 2003 Тираж39 прим Міністерство освіти і науки України Державний департамент інтелектуальної власності, Львівська площа, 8, м Київ, МСП, 04655, Україна ТОВ "Міжнародний науковий комітет", вул Артема, 77, м Київ, 04050, Україна
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice and method for noncontact recognition of edges of treatment or corresponding guiding parameters
Назва патенту російськоюУстройство и способ для бесконтактного распознавания краев обработки или соответствующих направляющих параметров
МПК / Мітки
МПК: A01B 69/04
Мітки: розпізнавання, спосіб, країв, відповідних, параметрів, безконтактного, напрямних, обробки, пристрій
Код посилання
<a href="https://ua.patents.su/10-57730-pristrijj-ta-sposib-dlya-bezkontaktnogo-rozpiznavannya-krav-obrobki-abo-vidpovidnikh-napryamnikh-parametriv.html" target="_blank" rel="follow" title="База патентів України">Пристрій та спосіб для безконтактного розпізнавання країв обробки або відповідних напрямних параметрів</a>
Пристрій для безконтактного вимірювання параметрів механічних коливань
Номер патенту: 35110
Опубліковано: 15.03.2001
Автор: Хлопов Григорій Іванович
МПК: G01H 9/00, G01N 22/00
Мітки: параметрів, безконтактного, вимірювання, механічних, коливань, пристрій
Формула / Реферат:
1. Пристрій для безконтактного вимірювання параметрів механічних коливань, який містить генератор НВЧ, передавальну та приймальну антени і аналого-цифровий перетворювач, вихід якого з'єднаний з входом, обчислювального пристрою, який відрізняється тим, що введені задавальний генератор, фазовий модулятор, міст НВЧ, перетворювач НВЧ. підсилювач, вимірювач рівня відбитого сигналу та індикатор, вихід генератора НВЧ і вихід приймальної антени...
Спосіб безконтактного вимірювання параметрів вібрацій та визначення форм коливань об’єктів
Номер патенту: 48774
Опубліковано: 15.08.2002
Автори: Чоловський Роман Геннадійович, Нікітін Олександр Олексійович, Ройзман Вілен Петрович
МПК: G01H 9/00, G01M 7/02, G01M 11/00, G01H 17/00
Мітки: вібрацій, форм, об'єктів, безконтактного, визначення, параметрів, вимірювання, спосіб, коливань
Формула / Реферат:
Спосіб безконтактного вимірювання параметрів вібрацій та визначення форм коливань об'єктів, який включає реєстрацію оптичними системами електромагнітних хвиль, які відбиті від коливального об'єкта, та визначення параметрів вібрацій об'єкта та його форми коливань, який відрізняється тим, що реєстрацію коливань об'єкта проводять швидкісною відеокамерою, а амплітуду, частоту та форму коливань, як обертових так і необертових об'єктів, визначають...
Спосіб повороту лопаток регулюючих пристроїв кільцевих конфузорів, дифузорів, зворотних напрямних апаратів та пристрій для його здійснення
Номер патенту: 55370
Опубліковано: 15.04.2003
Автори: Олефіренко Ольга Іванівна, Олефіренко Анатолій Іванович
МПК: F04D 29/32, F04D 17/00, F04D 29/42, F04D 29/40, F04D 29/30, F04D 29/18, F04D 29/46
Мітки: пристрій, конфузорів, зворотних, напрямних, пристроїв, повороту, регулюючих, апаратів, здійснення, кільцевих, спосіб, лопаток, дифузорів
Формула / Реферат:
1. Способ поворота лопаток устройства, согласно которого вырабатывают импульс, соответствующий изменению регулируемого параметра, при помощи регулятора, изменяют положение лопаток направляющего аппарата при помощи регулирующего органа, отличающийся тем, что вращают направляющий аппарат с регулирующим органом с переменной частотой при помощи привода.2. Устройство поворота лопаток, содержащее осевые поворотные аппараты и закрепленное в...
Пристрій для тимчасового зведення країв рани

Номер патенту: 44498
Опубліковано: 15.02.2002
Автор: Джерелій Олег Борисович
МПК: A61B 17/03
Мітки: тимчасового, зведення, пристрій, рані, країв
Формула / Реферат:
Пристрій для тимчасового зведення країв рани у вигляді вигнутої голки, який відрізняється тим, що голку оснащено отворами та знімними обмежниками на кінцях.
Спосіб безконтактного визначення струмів у підземних трубопроводах і пристрій для його реалізації
Номер патенту: 28731
Опубліковано: 16.10.2000
Автори: Кисіль Ігор Степанович, Стрілецький Юрій Йосипович
МПК: G01R 19/145, G01R 19/00, G01R 29/08
Мітки: визначення, безконтактного, струмів, спосіб, пристрій, реалізації, підземних, трубопроводах
Формула / Реферат:
1. Спосіб безконтактного визначення струмів у підземних трубопроводах, що включає вимірювання системою антен напруженості змінного електромагнітного поля, яке виникає внаслідок проходження струму по трубопроводу, який відрізняється тим, що вимірювання здійснюють за допомогою чотирьох приймальних антен, а визначення струму в трубопроводі проводять шляхом розв'язку такої системи рівнянь
Попередній патент: Закупорювальний пристрій
Наступний патент: Закупорювальний пристрій
Випадковий патент: Спосіб виготовлення композитного матеріалу та його застосування