Телематичний модуль вагона “тмв”


Формула / Реферат
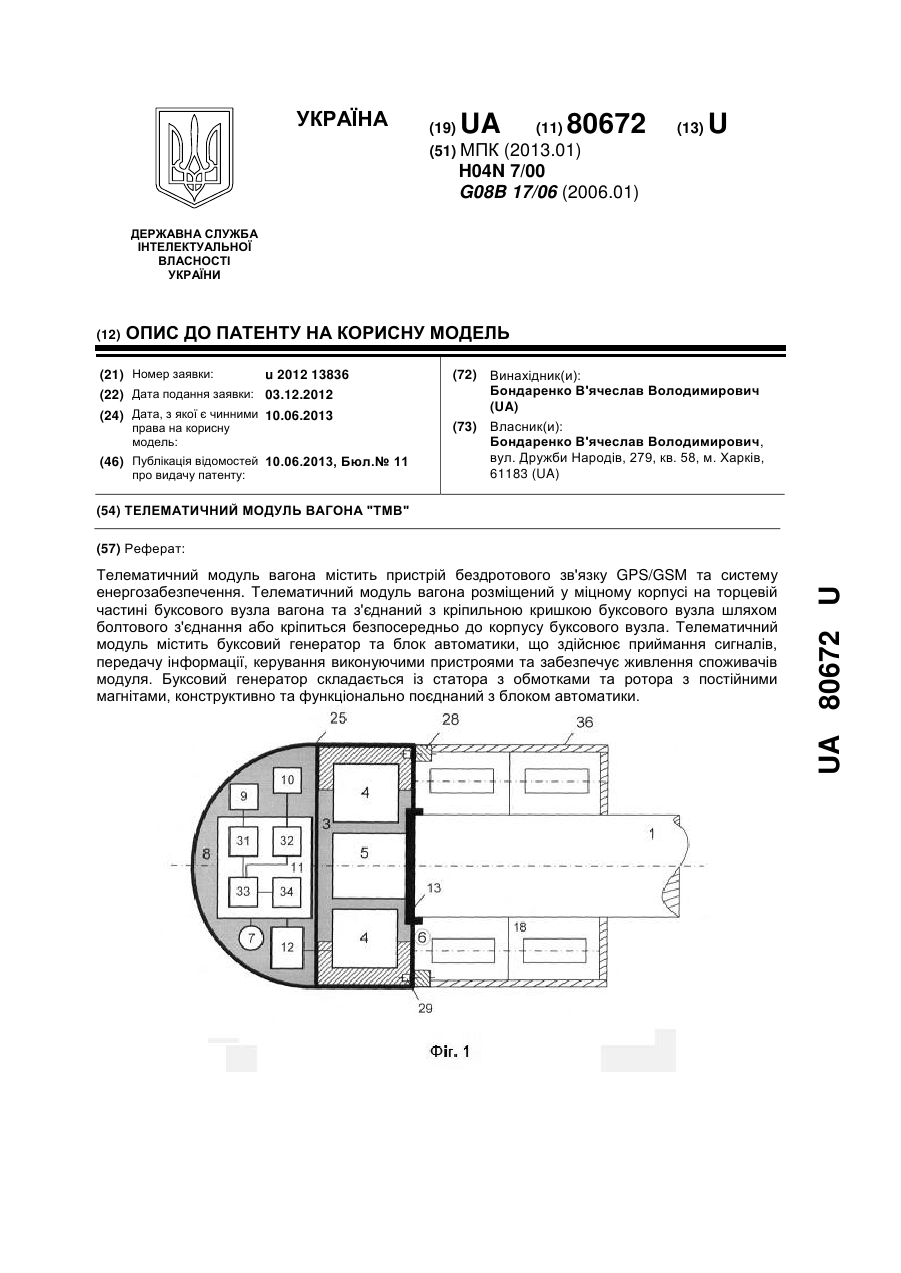
Телематичний модуль вагона, що містить пристрій бездротового зв'язку GPS/GSM та систему енергозабезпечення, який відрізняється тим, що телематичний модуль вагона розміщений у міцному корпусі на торцевій частині буксового вузла вагона, переважно на місці типової оглядової кришки, та з'єднаний з кріпильною кришкою буксового вузла шляхом болтового з'єднання або кріпиться безпосередньо до корпусу буксового вузла, який містить буксовий генератор, що забезпечує живлення електричною енергією споживачів телематичного модуля під час руху вагона, та блок автоматики, що здійснює приймання сигналів від супутників системи глобального позиціонування та датчиків вагона, передачу інформації про дислокацію та технічний стан вагона на наземний телематичний сервер по каналу бездротового зв'язку, керування виконуючими пристроями вагона та забезпечує живлення від акумуляторної батареї споживачів телематичного модуля під час стоянки та при невеликій швидкості руху вагона, причому буксовий генератор конструктивно являє собою безколекторну синхронну електричну машину зі збудженням від постійних магнітів, що складається із статора з обмотками та ротора з постійними магнітами, причому ротор буксового генератора поєднаний з віссю колісної пари або елементами торцевого кріплення внутрішніх кілець підшипників, а статор буксового генератора поєднаний з нерухомою частиною буксового вузла та його елементами, переважно з кріпильною кришкою, оглядовою кришкою або корпусом, причому буксовий генератор конструктивно та функціонально поєднаний з блоком автоматики, який має міцний та прозорий для радіохвиль корпус, у якому розміщені датчики систем контролю, радіочастотні мітки, акумуляторна батарея з регулятором заряду та телематичний контролер, який містить приймач системи глобального позиціонування, переважно GPS та/або ГЛОНАСС, приймач/передавач системи бездротового зв'язку, переважно GSM або іншого стандарту цифрового зв'язку поколінь 2G-4G, та/або радіочастотної ідентифікації, процесор, що відповідає за виконання програм, пам'ять для зберігання даних та інструкцій та АЦП для перетворення інформації з аналогових датчиків, причому телематичні модулі вагонів поїзда можуть бути сконфігурованими таким чином, щоб обмінюватись інформаційними повідомленнями між собою, з наземним телематичним сервером та з локомотивом по заданому користувачем алгоритму, використовуючи канали бездротового зв'язку.
Текст
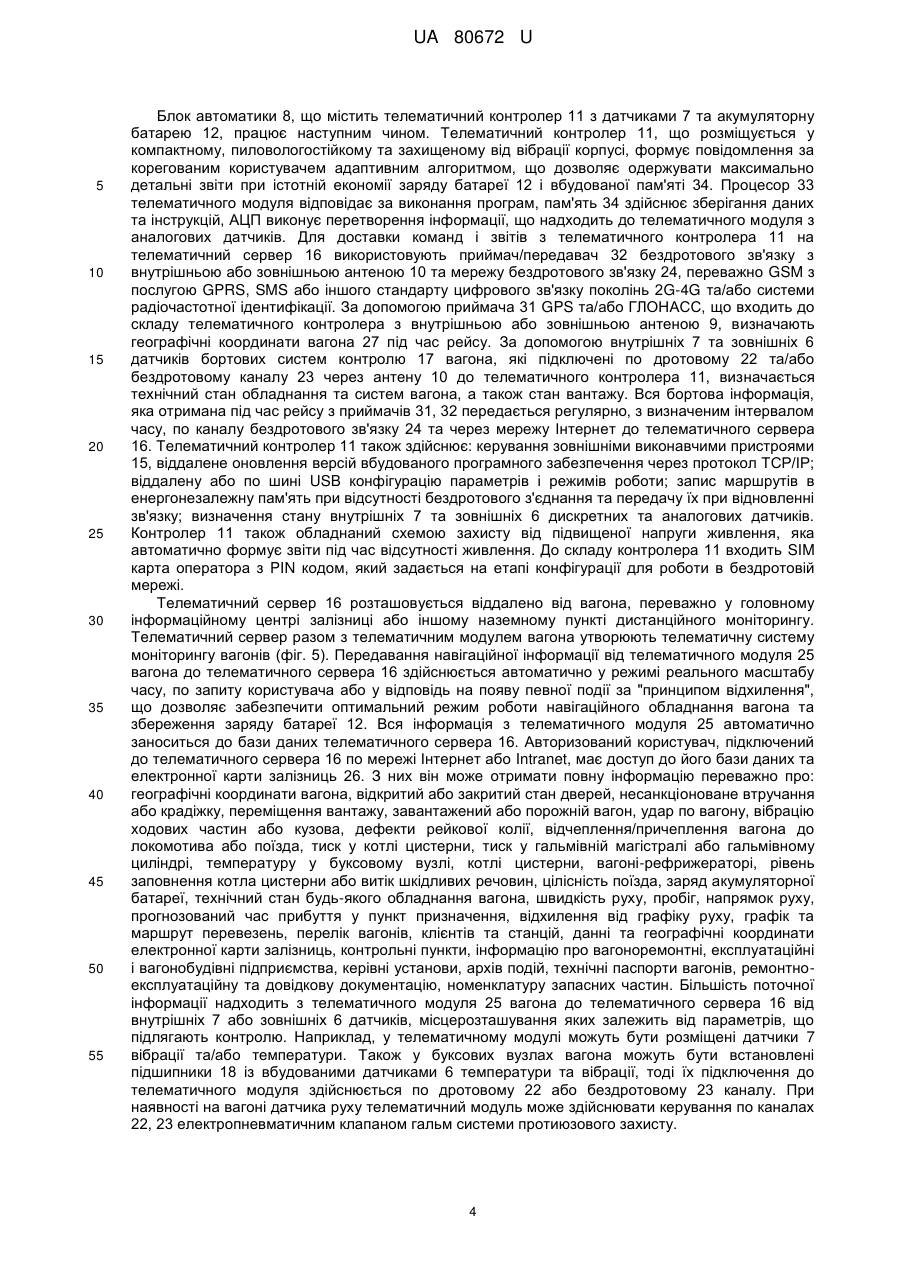
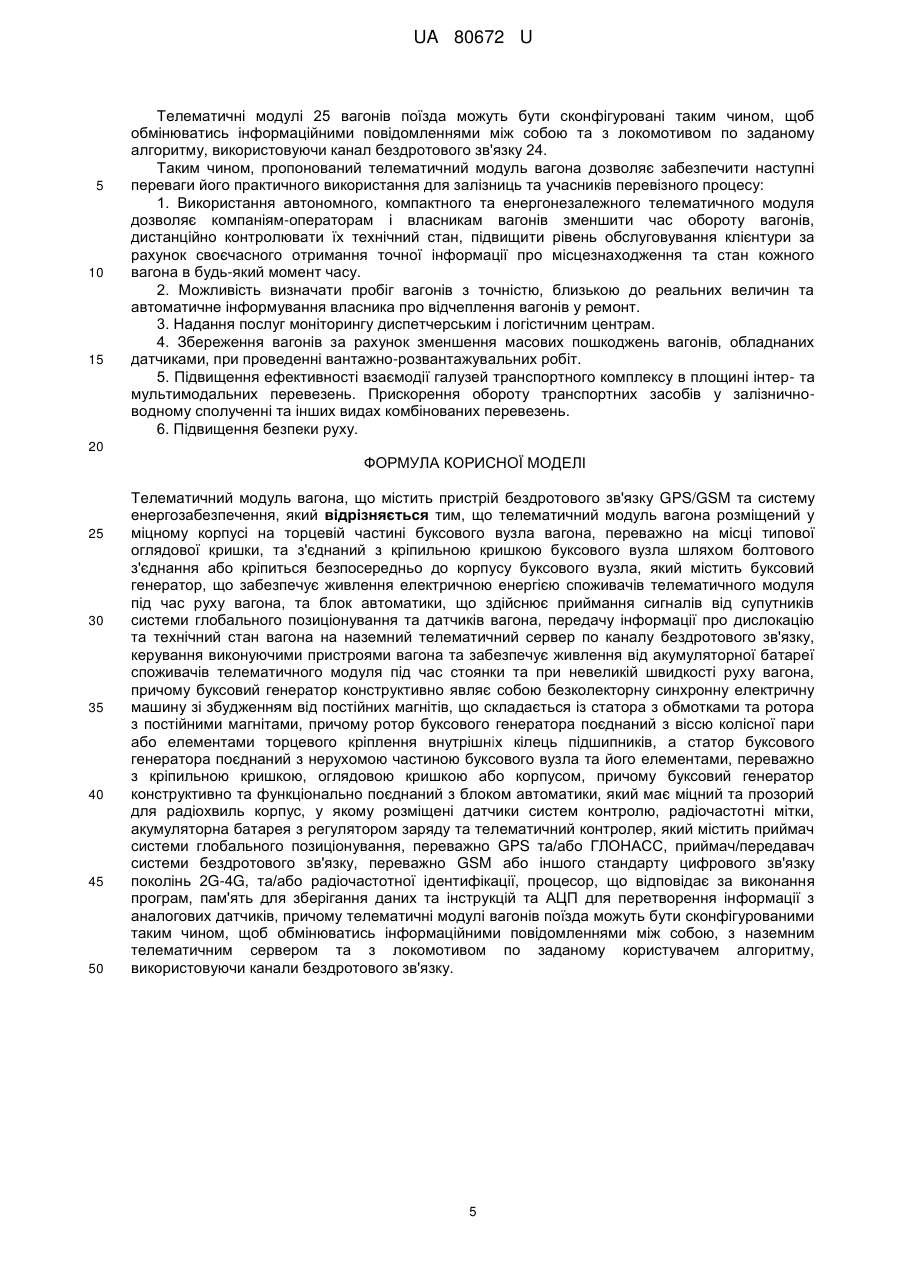
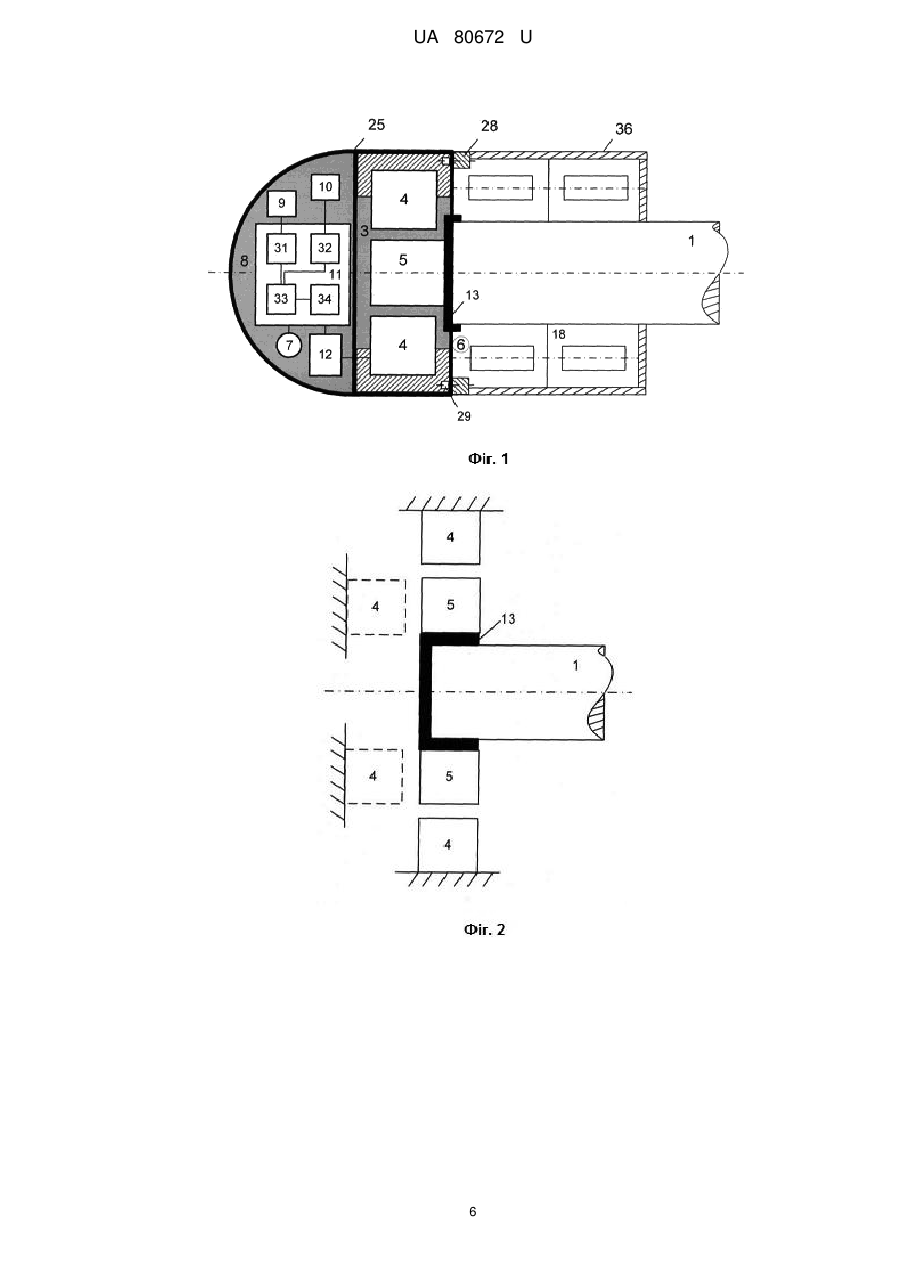
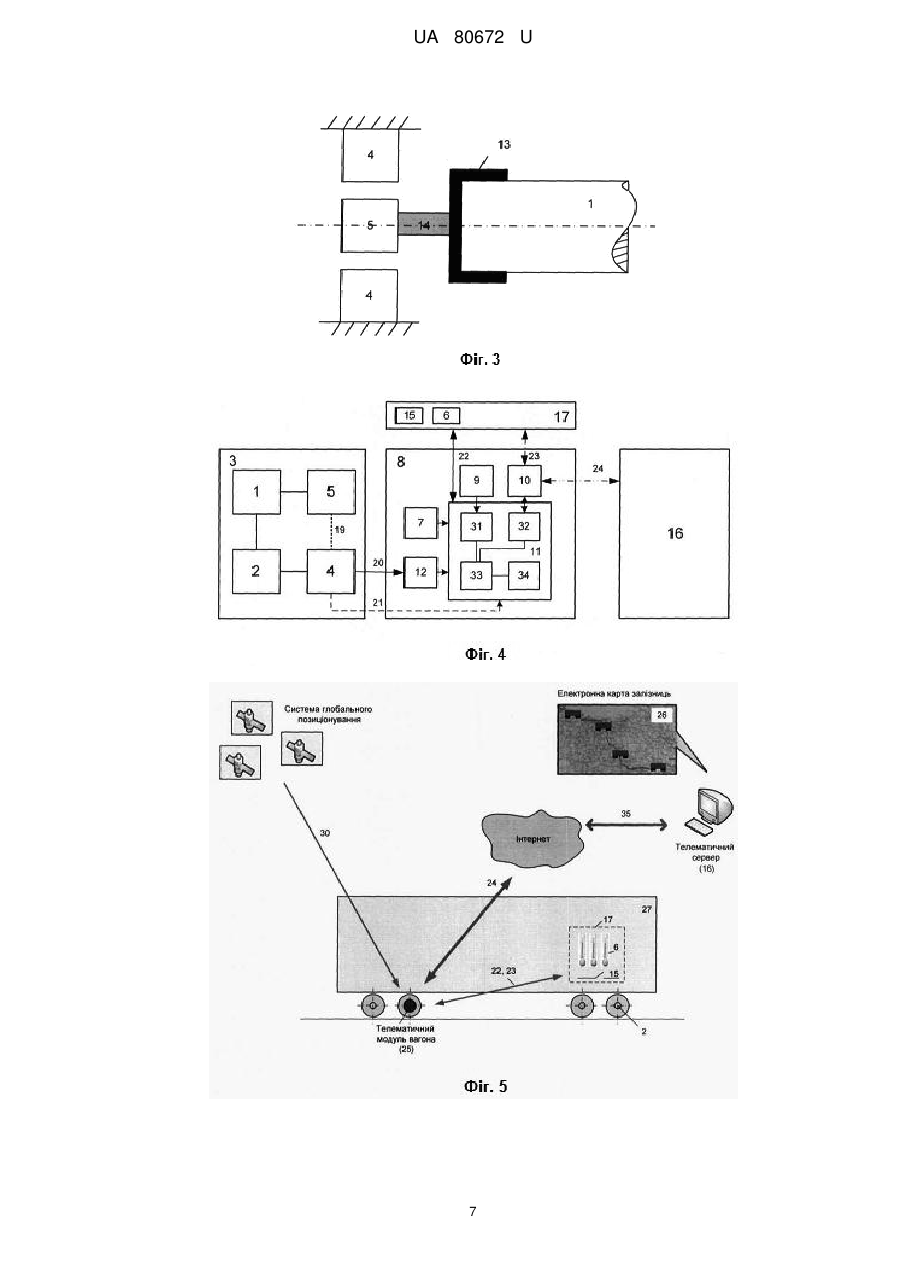
Реферат: UA 80672 U UA 80672 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі залізничного транспорту, а точніше - до пристрою, призначеного для спостереження за дислокацією вагонів, визначення їх технічного стану і стану вантажу, використовуючи технології супутникового та мобільного зв'язку. За аналог вибраний спосіб спостереження за дислокацією вагонів, що полягає у слідкуванні за вагонами з використанням бездротового зв'язку. Відповідно до корисної моделі попередньо формують систему спостереження із поєднаних між собою інформаційним зв'язком навігаційного пристрою GPS/GSM, що сконфігурований для двоспрямованої роботи, і серверів, які розташовують у ремонтно-експлуатаційних підприємствах та керуючих установах, які використовують мережу Інтернет та зв'язок GPRS для забезпечення комунікації сервера з навігаційним пристроєм вагона. Для цього вагон (вантажний або пасажирський) обладнають типовим навігаційним пристроєм GPS, який має вбудовані або зовнішні антени GPS та GSM. Пристрій розміщують у пилевологостійкому та міцному до ударів корпусі, який розташовують на кузові або рамі вагона та кріплять до основної частини шляхом зварення або з використанням болтового з'єднання. Для живлення навігаційного пристрою використовують акумуляторну батарею або бортову електричну мережу вагона. За допомогою супутникого зв'язку GPS визначають географічні координати, пробіг та швидкість руху вагона будь-якого типу під час рейсу у реальному масштабі часу або по запиту користувача, після чого формують звіт та передають його по каналах мобільного або стільникового зв'язку до серверів. Для доставки повідомлень, команд і звітів з навігаційного пристрою використовують мережу мобільного зв'язку GSM з послугою GPRS та SMS, а вихідну інформацію, що отримують від навігаційного пристрою вагона, відображають на заданій електронній карті користувача та заносять дані до бази даних серверів. Дані про фактичну дислокацію вагона відображають у вигляді графічного символу, місцезнаходження якого на електронній карті відповідає географічному розташуванню вагона на місцевості на даний час [див. Спосіб спостереження за дислокацією вагонів, патент України № 61636 на корисну модель, G08B 17/06, опубл. 25.07.2011, бюл. № 14]. Недоліком відомого способу та системи, що його реалізує є те, що вони недостатньо ефективні та мають обмежені функціональні можливості у зв'язку з тим, що не дозволяють забезпечити стабільне живлення радіонавігаційного обладнання вагона протягом тривалого часу експлуатації. Відсутність на борту вантажного вагона власного джерела електричної енергії є одним з головних чинників, що стримує використання будь-яких електричних та електронних систем на вантажних вагонах (окрім рефрижераторних). Використання для живлення радіонавігаційної системи вагона тільки акумуляторної батареї пов'язано з рядом суттєвих обмежень, основними з яких є необхідність її періодичної підзарядки або заміни, що підвищує експлуатаційну вартість всієї системи та робить неможливим передавати повідомлення з великим обсягом інформації, з невеликими інтервалами або у режимі реального часу, оскільки це критично зменшує рівень заряду та ресурс батареї, особливо при низьких температурах навколишнього середовища та вібрації. Поставлена задача вирішується тим, що телематичний модуль вагона розміщений у міцному корпусі на торцевій частині буксового вузла вагона, переважно на місці типової оглядової кришки та з'єднаний з кріпильною кришкою буксового вузла шляхом болтового з'єднання або кріпиться безпосередньо до корпусу буксового вузла замість кріпильної та оглядової кришок, який містить буксовий генератор, що забезпечує живлення електричною енергією споживачів телематичного модуля під час руху вагона, та блок автоматики, що здійснює приймання сигналів від супутників системи глобального позиціонування та датчиків вагона, передачу інформації про дислокацію та технічний стан вагона на наземний телематичний сервер по каналу бездротового зв'язку, керування виконуючими пристроями вагона та забезпечує живлення споживачів телематичного модуля від акумуляторної батареї під час стоянки та при низькій швидкості руху вагона, причому, буксовий генератор конструктивно являє собою безколекторну електричну машину із збудженням від постійних магнітів, що складається із статора з обмотками та ротора з постійними магнітами на валу, причому ротор буксового генератора поєднаний з віссю колісної пари або елементами торцевого кріплення внутрішніх кілець підшипників, а статор буксового генератора поєднаний з нерухомою частиною буксового вузла та його елементами, переважно з кріпильною кришкою, оглядовою кришкою або корпусом, причому буксовий генератор конструктивно та функціонально поєднаний з блоком автоматики, який має міцний та прозорий для радіохвиль корпус, у якому розміщені датчики систем контролю, радіочастотні мітки, акумуляторна батарея з регулятором заряду та телематичний контролер, який містить приймач системи глобального позиціонування, переважно GPS та/або ГЛОНAСС, приймач/передавач системи бездротового зв'язку, переважно GSM або іншого стандарту цифрового зв'язку поколінь 2G-4G, та/або радіочастотної ідентифікації, процесор, що відповідає за виконання програм, пам'ять для 1 UA 80672 U 5 10 15 20 25 30 35 40 45 50 55 зберігання даних та інструкцій, та АЦП для перетворення інформації з аналогових датчиків, причому телематичні модулі вагонів поїзда можуть бути сконфігурованими таким чином, щоб обмінюватись інформаційними повідомленнями між собою, з наземним телематичним сервером та з локомотивом по заданому користувачем алгоритму, використовуючи канали бездротового зв'язку. Основним джерелом електричної енергії для живлення телематичного модуля під час руху вагона є буксовий генератор, а додатковим - акумуляторна батарея, яка заряджається під час руху та є буфером між буксовим генератором та блоком автоматики, забезпечуючи останній джерелом постійного струму. Крім того, в окремих випадках виконання телематичного модуля, він може містити такі ознаки: конструкція буксового генератора може бути вбудованою у буксовий вузол або бути зовнішньою по відношенню до нього. При вбудованій конструкції буксового генератора постійні магніти, що розташовані у корпусі букси на елементах торцевого кріплення внутрішніх кілець підшипників, виконують функцію ротора та обертаються разом з віссю колісної пари вагона, а обмотки, що розташовані на внутрішній нерухомій поверхні буксового вузла, переважно на кріпильній кришці або оглядовій кришці, або корпусі буксового вузла, виконують роль статора. При зовнішній конструкції типовий синхронний електричний генератор зі збудженням від постійних магнітів закріплений на місці оглядової кришки та з'єднаний з кріпильною кришкою буксового вузла шляхом болтового з'єднання або кріпиться безпосередньо до корпусу буксового вузла замість кріпильної та оглядової кришок, при цьому вал ротора генератора з'єднаний за допомогою муфти з елементами торцевого кріплення внутрішніх кілець підшипників, що розташовані на осі колісної пари вагона. У результаті використання корисної моделі, що заявляється, забезпечується одержання технічного результату, який полягає в підвищенні ефективності автоматичного визначення географічних координат, пробігу, швидкості руху та стану конкретного вагона будь-якого типу у режимі реального масштабу часу за рахунок отримання на вантажному вагоні власного незалежного джерела електричної енергії від буксового генератора, а також забезпечення модульності, компактності конструкції та розширення функціональних можливостей. Використання телематичного модуля, що розташовується на торцевій частині буксового вузла вагона та має власне джерело електричної енергії від буксового генератора з приводом від торця осі колісної пари, дозволяє підвищити ефективність пристрою та сформувати телематичну систему моніторингу із поєднаних між собою бездротовим зв'язком телематичного модуля та телематичного сервера. Це дасть змогу передавати дані з телематичного модуля вагона на телематичний сервер та відображати на електронній карті користувачів у реальному масштабі часу інформацію про фактичну дислокацію та технічний стан вагона на поточний час. У цілому, відмітні ознаки телематичного модуля, що заявляється, є суттєвими і необхідними для досягнення нового технічного результату. Суть корисної моделі пояснюється кресленнями, де на фіг. 1 зображений телематичний модуль вагона, на фіг. 2 - варіант конструкції буксового генератора, вбудованого у буксовий вузол вагона, на фіг. 3 - варіант зовнішньої конструкції буксового генератора відносно буксового вузла вагона, на фіг. 4 - схема з'єднань функціональних елементів телематичного модуля, на фіг. 5 - схема взаємодії телематичного модуля вагона з елементами телематичної системи. На кресленнях позначено: 1 - вісь колісної пари, 2 - буксовий вузол, 3 - буксовий генератор з елементами приводу, 4 - статор генератора, 5 - ротор генератора, 6- датчики зовнішні, 7 датчики внутрішні, 8 - блок автоматики, 9 - антена приймача системи глобального позиціювання, 10 - антена приймача/передавача системи бездротового зв'язку, 11 телематичний контролер, 12 - акумуляторна батарея, 13 - торцеве кріплення внутрішніх кілець підшипників буксового вузла, 14 - муфта приводу генератора, 15 - виконуючі пристрої, 16 наземний телематичний сервер, 17 - бортові системи контролю вагона, 18 - підшипник буксового вузла, 19 - магнітний потік між статором та ротором генератора, 20 - канал зарядки акумуляторної батареї від генератора, 21 - канал живлення телематичного контролера від генератора, 22 - дротовий зв'язок бортових систем контролю вагона з телематичним модулем, 23 - бездротовий зв'язок бортових систем контролю вагона з телематичним модулем, 24 бездротовий зв'язок телематичного модуля вагона з наземним телематичним сервером, 25 телематичний модуль, 26 - електронна карта залізниць, 27 - вагон, 28 - кріпильна кришка, 29 болтове кріплення телематичного модуля до буксового вузла, 30 - сигнал від супутників системи глобального позиціювання, 31 - приймач системи глобального позиціювання, 32 приймач/передавач системи бездротового зв'язку, 33 - процесор, 34 - пам'ять, 35 - канал дротового/бездротового зв'язку телематичного сервера з Інтернетом, 36 - корпус буксового вузла. 2 UA 80672 U 5 10 15 20 25 30 35 40 45 50 55 60 Телематичний модуль 25 вагона (див. фіг. 1) включає до свого складу буксовий генератор 3 та блок автоматики 8, що має міцний та прозорий для радіохвиль корпус, у якому розміщуються датчики 7, акумуляторна батарея 12 та телематичний контролер 11, який містить приймач 31 системи глобального позиціювання, переважно GPS та/або ГЛОНАСС з внутрішньою або зовнішньою антеною 9, приймач/передавач 32 системи бездротового зв'язку, переважно GSM або іншого стандарту цифрового зв'язку поколінь 2G-4G, та/або радіочастотної ідентифікації з внутрішньою або зовнішньою антеною 10, процесор 33, що відповідає за виконання програм, пам'ять 34 для зберігання даних та інструкцій та АЦП для перетворення інформації з аналогових датчиків. Телематичний модуль 25 розташований у міцному корпусі на торцевій частині буксового вузла 2 вагона 27, переважно на місці типової оглядової кришки, та з'єднаний з кріпильною кришкою 28 шляхом болтового з'єднання 29 або кріпиться безпосередньо до корпусу 36 буксового вузла 2 замість кріпильної 28 та оглядової кришок, який виконує функції діагностики та дистанційного контролю бортового обладнання вагона, а також забезпечує бездротовий зв'язок 24, переважно GSM або іншого цифрового стандарту поколінь 2G-4G та/або технології радіочастотної ідентифікації, з телематичним сервером 16 та локомотивом. У телематичному модулі можуть розміщуватись активні, і/або пасивні радіочастотні мітки та зчитуючі пристрої для забезпечення комунікації телематичного контролера вагона з наземними та бортовими об'єктами за технологією радіочастотної ідентифікації, переважно для приймання/передачі контрольно-діагностичної інформації, обміну інформацією з іншими рухомими та нерухомими об'єктами. Для забезпечення постійної стабільної напруги живлення споживачів телематичного модуля (переважно батареї 12 та/або контролера 11) від буксового генератора, у ланцюги 20 та 21 має бути підключений перетворювач/регулятор, який розміщується у буксовому генераторі 3 або блоці автоматики 8. Крім того, в окремих випадках виконання телематичного модуля 25, він може містити такі ознаки: конструкція буксового генератора може були вбудованою у буксовий вузол або бути зовнішньою по відношенню до нього. При вбудованій конструкції буксового генератора 3 постійні магніти, що розташовані у буксі на елементах торцевого кріплення 13 внутрішніх кілець підшипників 18, виконують функцію ротора 5 та обертаються разом з віссю 1 колісної пари вагона 27, а обмотки, що розташовані на внутрішній нерухомій поверхні буксового вузла 2, переважно на кріпильній кришці 28, оглядовій кришці (штрихова лінія) або корпусі буксового вузла 2, виконують роль статора 4 (фіг. 2). При зовнішній конструкції типовий синхронний електричний генератор 3 зі збудженням від постійних магнітів закріплений на місці оглядової кришки та з'єднаний з кріпильною кришкою 28 буксового вузла 2 шляхом болтового з'єднання 29 або кріпиться безпосередньо до корпусу 36 буксового вузла 2 замість кріпильної 28 та оглядової кришок, при цьому вал ротора 5 генератора 3 з'єднаний за допомогою муфти 14 з елементами торцевого кріплення 13 внутрішніх кілець підшипників 18, що розташовані на осі 1 колісної пари вагона (фіг. 3). Причому, незалежно від конструкції буксового вузла вагона та буксового генератора, відмінною ознакою є те, що ротор 5 буксового генератора 3 поєднаний з віссю 1 колісної пари вагона або елементами торцевого кріплення 13 внутрішніх кілець підшипників 18, а статор 4 буксового генератора 3 поєднаний з нерухомою частиною буксового вузла 2 та його елементами, переважно з кріпильною кришкою 28, оглядовою кришкою або корпусом 36. Телематичний модуль працює таким чином. Попередньо вагон 27 (фіг. 5) додатково обладнується телематичним модулем 25, який монтується за допомогою болтів на торцеву частину буксового вузла 2 замість оглядової та/або кріпильної кришки. При необхідності вагон також обладнується зовнішніми датчиками 6 систем контролю 17 та виконуючими пристроями 15, які підключаються дротовим 22 або бездротовим 23 зв'язком до телематичного модуля 25. Телематичний модуль вагона та телематичний сервер об'єднуються у єдину бездротову телематичну систему. Зразу після монтажу на вагон телематичний модуль 25 починає працювати з живленням від акумуляторної батареї 12 та передавати дані про дислокацію та стан вагона на телематичний сервер 16 по каналу бездротового зв'язку 24 (фіг. 4). Під час руху вагона ротор 5 буксового генератора 3 з приводом 13 від торця осі 1 починає обертатись і завдяки зміні магнітного потоку 19 між ротором 5 та статором 4, у обмотках останнього збуджується електричний струм, яким заряджається через перетворювач/регулятор акумуляторна батарея 12 по каналу 20. Таким чином, на стоянці або під час руху вагона, живлення блока автоматики телематичного модуля здійснюється від акумуляторної батареї, а буксовий генератор виконує функції зарядного пристрою батареї під час руху вагона. Але при наявності у конструкції буксового генератора перетворювача/регулятора, можливе отримання джерела постійного струму для живлення блока автоматики безпосередньо від нього по каналу 21 без необхідності використання акумуляторної батареї 12. Однак у даному випадку на стоянці або при малій швидкості руху вагона споживачі телематичного модуля будуть знеструмлені. 3 UA 80672 U 5 10 15 20 25 30 35 40 45 50 55 Блок автоматики 8, що містить телематичний контролер 11 з датчиками 7 та акумуляторну батарею 12, працює наступним чином. Телематичний контролер 11, що розміщується у компактному, пиловологостійкому та захищеному від вібрації корпусі, формує повідомлення за корегованим користувачем адаптивним алгоритмом, що дозволяє одержувати максимально детальні звіти при істотній економії заряду батареї 12 і вбудованої пам'яті 34. Процесор 33 телематичного модуля відповідає за виконання програм, пам'ять 34 здійснює зберігання даних та інструкцій, АЦП виконує перетворення інформації, що надходить до телематичного модуля з аналогових датчиків. Для доставки команд і звітів з телематичного контролера 11 на телематичний сервер 16 використовують приймач/передавач 32 бездротового зв'язку з внутрішньою або зовнішньою антеною 10 та мережу бездротового зв'язку 24, переважно GSM з послугою GPRS, SMS або іншого стандарту цифрового зв'язку поколінь 2G-4G та/або системи радіочастотної ідентифікації. За допомогою приймача 31 GPS та/або ГЛОНАСС, що входить до складу телематичного контролера з внутрішньою або зовнішньою антеною 9, визначають географічні координати вагона 27 під час рейсу. За допомогою внутрішніх 7 та зовнішніх 6 датчиків бортових систем контролю 17 вагона, які підключені по дротовому 22 та/або бездротовому каналу 23 через антену 10 до телематичного контролера 11, визначається технічний стан обладнання та систем вагона, а також стан вантажу. Вся бортова інформація, яка отримана під час рейсу з приймачів 31, 32 передається регулярно, з визначеним інтервалом часу, по каналу бездротового зв'язку 24 та через мережу Інтернет до телематичного сервера 16. Телематичний контролер 11 також здійснює: керування зовнішніми виконавчими пристроями 15, віддалене оновлення версій вбудованого програмного забезпечення через протокол TCP/IP; віддалену або по шині USB конфігурацію параметрів і режимів роботи; запис маршрутів в енергонезалежну пам'ять при відсутності бездротового з'єднання та передачу їх при відновленні зв'язку; визначення стану внутрішніх 7 та зовнішніх 6 дискретних та аналогових датчиків. Контролер 11 також обладнаний схемою захисту від підвищеної напруги живлення, яка автоматично формує звіти під час відсутності живлення. До складу контролера 11 входить SIM карта оператора з PIN кодом, який задається на етапі конфігурації для роботи в бездротовій мережі. Телематичний сервер 16 розташовується віддалено від вагона, переважно у головному інформаційному центрі залізниці або іншому наземному пункті дистанційного моніторингу. Телематичний сервер разом з телематичним модулем вагона утворюють телематичну систему моніторингу вагонів (фіг. 5). Передавання навігаційної інформації від телематичного модуля 25 вагона до телематичного сервера 16 здійснюється автоматично у режимі реального масштабу часу, по запиту користувача або у відповідь на появу певної події за "принципом відхилення", що дозволяє забезпечити оптимальний режим роботи навігаційного обладнання вагона та збереження заряду батареї 12. Вся інформація з телематичного модуля 25 автоматично заноситься до бази даних телематичного сервера 16. Авторизований користувач, підключений до телематичного сервера 16 по мережі Інтернет або Intranet, має доступ до його бази даних та електронної карти залізниць 26. З них він може отримати повну інформацію переважно про: географічні координати вагона, відкритий або закритий стан дверей, несанкціоноване втручання або крадіжку, переміщення вантажу, завантажений або порожній вагон, удар по вагону, вібрацію ходових частин або кузова, дефекти рейкової колії, відчеплення/причеплення вагона до локомотива або поїзда, тиск у котлі цистерни, тиск у гальмівній магістралі або гальмівному циліндрі, температуру у буксовому вузлі, котлі цистерни, вагоні-рефрижераторі, рівень заповнення котла цистерни або витік шкідливих речовин, цілісність поїзда, заряд акумуляторної батареї, технічний стан будь-якого обладнання вагона, швидкість руху, пробіг, напрямок руху, прогнозований час прибуття у пункт призначення, відхилення від графіку руху, графік та маршрут перевезень, перелік вагонів, клієнтів та станцій, данні та географічні координати електронної карти залізниць, контрольні пункти, інформацію про вагоноремонтні, експлуатаційні і вагонобудівні підприємства, керівні установи, архів подій, технічні паспорти вагонів, ремонтноексплуатаційну та довідкову документацію, номенклатуру запасних частин. Більшість поточної інформації надходить з телематичного модуля 25 вагона до телематичного сервера 16 від внутрішніх 7 або зовнішніх 6 датчиків, місцерозташування яких залежить від параметрів, що підлягають контролю. Наприклад, у телематичному модулі можуть бути розміщені датчики 7 вібрації та/або температури. Також у буксових вузлах вагона можуть бути встановлені підшипники 18 із вбудованими датчиками 6 температури та вібрації, тоді їх підключення до телематичного модуля здійснюється по дротовому 22 або бездротовому 23 каналу. При наявності на вагоні датчика руху телематичний модуль може здійснювати керування по каналах 22, 23 електропневматичним клапаном гальм системи протиюзового захисту. 4 UA 80672 U 5 10 15 Телематичні модулі 25 вагонів поїзда можуть бути сконфігуровані таким чином, щоб обмінюватись інформаційними повідомленнями між собою та з локомотивом по заданому алгоритму, використовуючи канал бездротового зв'язку 24. Таким чином, пропонований телематичний модуль вагона дозволяє забезпечити наступні переваги його практичного використання для залізниць та учасників перевізного процесу: 1. Використання автономного, компактного та енергонезалежного телематичного модуля дозволяє компаніям-операторам і власникам вагонів зменшити час обороту вагонів, дистанційно контролювати їх технічний стан, підвищити рівень обслуговування клієнтури за рахунок своєчасного отримання точної інформації про місцезнаходження та стан кожного вагона в будь-який момент часу. 2. Можливість визначати пробіг вагонів з точністю, близькою до реальних величин та автоматичне інформування власника про відчеплення вагонів у ремонт. 3. Надання послуг моніторингу диспетчерським і логістичним центрам. 4. Збереження вагонів за рахунок зменшення масових пошкоджень вагонів, обладнаних датчиками, при проведенні вантажно-розвантажувальних робіт. 5. Підвищення ефективності взаємодії галузей транспортного комплексу в площині інтер- та мультимодальних перевезень. Прискорення обороту транспортних засобів у залізничноводному сполученні та інших видах комбінованих перевезень. 6. Підвищення безпеки руху. 20 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 35 40 45 50 Телематичний модуль вагона, що містить пристрій бездротового зв'язку GPS/GSM та систему енергозабезпечення, який відрізняється тим, що телематичний модуль вагона розміщений у міцному корпусі на торцевій частині буксового вузла вагона, переважно на місці типової оглядової кришки, та з'єднаний з кріпильною кришкою буксового вузла шляхом болтового з'єднання або кріпиться безпосередньо до корпусу буксового вузла, який містить буксовий генератор, що забезпечує живлення електричною енергією споживачів телематичного модуля під час руху вагона, та блок автоматики, що здійснює приймання сигналів від супутників системи глобального позиціонування та датчиків вагона, передачу інформації про дислокацію та технічний стан вагона на наземний телематичний сервер по каналу бездротового зв'язку, керування виконуючими пристроями вагона та забезпечує живлення від акумуляторної батареї споживачів телематичного модуля під час стоянки та при невеликій швидкості руху вагона, причому буксовий генератор конструктивно являє собою безколекторну синхронну електричну машину зі збудженням від постійних магнітів, що складається із статора з обмотками та ротора з постійними магнітами, причому ротор буксового генератора поєднаний з віссю колісної пари або елементами торцевого кріплення внутрішніх кілець підшипників, а статор буксового генератора поєднаний з нерухомою частиною буксового вузла та його елементами, переважно з кріпильною кришкою, оглядовою кришкою або корпусом, причому буксовий генератор конструктивно та функціонально поєднаний з блоком автоматики, який має міцний та прозорий для радіохвиль корпус, у якому розміщені датчики систем контролю, радіочастотні мітки, акумуляторна батарея з регулятором заряду та телематичний контролер, який містить приймач системи глобального позиціонування, переважно GPS та/або ГЛОНАСС, приймач/передавач системи бездротового зв'язку, переважно GSM або іншого стандарту цифрового зв'язку поколінь 2G-4G, та/або радіочастотної ідентифікації, процесор, що відповідає за виконання програм, пам'ять для зберігання даних та інструкцій та АЦП для перетворення інформації з аналогових датчиків, причому телематичні модулі вагонів поїзда можуть бути сконфігурованими таким чином, щоб обмінюватись інформаційними повідомленнями між собою, з наземним телематичним сервером та з локомотивом по заданому користувачем алгоритму, використовуючи канали бездротового зв'язку. 5 UA 80672 U 6 UA 80672 U 7 UA 80672 U Комп’ютерна верстка С. Чулій Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 8
ДивитисяДодаткова інформація
Назва патенту англійськоюTelematic module of tmv carriage
Автори англійськоюBondarenko Viacheslav Volodymyrovych
Назва патенту російськоюТелематический модуль вагона "тмв"
Автори російськоюБондаренко Вячеслав Владимирович
МПК / Мітки
МПК: H04N 7/00, G08B 17/06
Мітки: телематичний, модуль, вагона, тмв
Код посилання
<a href="https://ua.patents.su/10-80672-telematichnijj-modul-vagona-tmv.html" target="_blank" rel="follow" title="База патентів України">Телематичний модуль вагона “тмв”</a>
Візок вантажного вагона
Номер патенту: 22312
Опубліковано: 25.04.2007
Автори: Мямлін Сергій Віталійович, Пуларія Андрій Луарсабович, Письменний Євген Олександрович, Жижко Вікторія Володимирівна, Биців Ольга Ігорівна
МПК: B61F 5/00
Мітки: візок, вантажного, вагона
Формула / Реферат:
Візок вантажного вагона, що складається з двох колісних пар з буксовими вузлами, двох бокових рам, надресорної балки, гальмівного обладнання та двох ступенів ресорного підвішування - центрального та буксового з адаптером, які містять неметалеві пружні елементи, який відрізняється тим, що пружні елементи центрального підвішування та пружні елементи буксового підвішування виконані з армованого пружного матеріалу.
Вузол з’єднання бічної рами з колісною парою у візку вантажного залізничного вагона

Номер патенту: 63359
Опубліковано: 10.10.2011
Автори: Рудакова Єкатєріна Алєксандровна, Сухіх Ігорь Владіміровіч, Орлова Анна Міхайловна
МПК: B61F 5/00
Мітки: парою, вантажного, вузол, залізничного, вагона, бічної, колісною, рами, візку, з'єднання
Формула / Реферат:
1. Вузол з'єднання бічної рами з колісною парою у візку вантажного залізничного вагона, який містить П-образний буксовий отвір зі встановленою на опорній поверхні зносостійкою знімною скобою, адаптер прямокутної форми з циліндричним вирізом у нижній частині під установлення на дворядний касетний підшипник колісної пари і блокувальний елемент, який запобігає виходу колісної пари з буксового отвору бічної рами, закріплений за допомогою болта...
Система електропостачання пасажирського вагона з двома підвагонними генераторами
Номер патенту: 17040
Опубліковано: 15.09.2006
Автор: Кукса Юрій Якович
МПК: B60M 1/00
Мітки: двома, система, генераторами, підвагонними, пасажирського, вагона, електропостачання
Формула / Реферат:
Система електропостачання пасажирського вагона з двома підвагонними генераторами, що складається з двох підвагонних генераторів та електричних кіл живлення, яка відрізняється тим, що електричні кола кожного генератора виконані незалежними одне від одного.
Гальмові системи, чутливі до маси транспортного засобу, для залізничного вагона та для візка вагона і гальмовий вузол вагона
Номер патенту: 90678
Опубліковано: 25.05.2010
Автор: Рінг Майкл Е.
МПК: B61H 13/00, B60T 8/18
Мітки: вагона, засобу, гальмовий, системі, гальмові, маси, транспортного, залізничного, вузол, чутливі, візка
Формула / Реферат:
1. Гальмова система, чутлива до маси транспортного засобу, для залізничного вагона (2), яка містить керуючий клапан (120), який розподіляє тиск текучого середовища, яка відрізняється тим, що керуючий клапан включає в себе клапанний засіб (100), який включає в себе лінійно рухомий засіб (110), який виконаний з можливістю зворотно-поступального руху і має перший кінець, який виконаний з можливістю взаємодії з залізничним вагоном (2),...
Операційний підсилювач сигналу датчика, наприклад наявності вагона на колії
Номер патенту: 12099
Опубліковано: 16.01.2006
Автор: Снітовський Володимир Михайлович
МПК: H03K 3/023
Мітки: колії, сигналу, операційний, підсилювач, вагона, датчика, наприклад, наявності
Формула / Реферат:
Операційний підсилювач сигналу датчика, наприклад наявності вагона на колії, що містить датчик, наприклад наявності вагона на колії, вхідний фільтр і власне операційний підсилювач, який відрізняється тим, що до виходу власне операційного підсилювача підключений своїм входом вихідний фільтр, вихід якого з'єднаний із входом вузла видачі дискретного сигналу.
Попередній патент: Застосування гліцину в комплексному лікуванні патологічного спортивного серця – стресорної кардіоміопатії у спортсменів
Наступний патент: Спосіб терапії хворих на поширені дерматози з ускладненим алергологічним анамнезом
Випадковий патент: Пристрій для експрес-діагностики інфекційних захворювань