Модульно структурована допоміжна наземна бойова робототехнічна машина супроводження бронетанкового озброєння і техніки
Номер патенту: 99033
Опубліковано: 10.07.2012
Автори: Борисюк Михайло Дем'янович, Магерамов Лютфалій Курбан-Алієвич, Дяченко Олександр Феодосійович, Янчик Олександр Григорович, Клименко Вадим Миколайович, Беліков Віктор Тріфонович, Лещенко Олег Іванович, Толстой Олексій Володимирович
Формула / Реферат
1. Модульно структурована наземна допоміжна бойова робототехнічна машина супроводження бронетанкового озброєння і техніки, основний виконавчий агрегат якої складається з енергетичного блока-модуля у вигляді комплекту статичних джерел електричної енергії електрохімічного, конденсаторного або комбінованого типу, статичних перетворювачів електроенергії, електромеханічних колісних, гусеничних або колісно-гусеничних рушіїв у вигляді автономних транспортних блоків-модулів, комплексів датчиків системи тягового електроприводу, зовнішньої обстановки і діагностики, а також комплекту блоків-модулів виконавчих механізмів, зокрема маніпуляторів, систем озброєння, модульних автономних блоків-модулів спостереження і розвідки та механізмів самоліквідації, яка відрізняється тим, що її основний виконавчий агрегат встановлений з фіксацією від бічного зміщення на подовжніх плоских опорних площадках, закріплених у контейнері, який встановлений за допомогою оснащених з кожного його торця комплектів з трьох опор кочення усередині герметичного циліндрового металевого або композитного корпусу, виконаного з можливістю закріплення та керованого відділення від зовнішньої поверхні супроводжуваного бронетанкового озброєння і техніки, при цьому центр тяжіння вказаної робототехнічної машини знаходиться нижче за подовжню вісь зовнішнього герметичного корпусу на відстані, рівній не менше однієї третини його радіусу.
2. Модульно структурована наземна допоміжна бойова робототехнічна машина супроводження бронетанкового озброєння і техніки за п. 1, яка відрізняється тим, що її основний виконавчий агрегат оснащений гвинтовим механізмом регулювання ширини бази опорних коліс автономних транспортних блоків-модулів.
3. Модульно структурована наземна допоміжна бойова робототехнічна машина супроводження бронетанкового озброєння і техніки за п. 1, яка відрізняється тим, що у вузлах кріплення бічних кришок герметичного циліндрового корпусу встановлені піропатрони для дистанційно керованого або автоматизованого відділення вказаних кришок від корпусу.
4. Модульно структурована наземна допоміжна бойова робототехнічна машина супроводження бронетанкового озброєння і техніки за п. 1 або п. 2, яка відрізняється тим, що контейнер для розміщення вказаного основного виконавчого агрегату в герметичному циліндровому корпусі виконаний у вигляді дуги з двох плоских торцевих дугових основ, які об'єднані в жорстку конструкцію за допомогою набору подовжніх жорстких ребер.
5. Модульно структурована наземна допоміжна бойова робототехнічна машина супроводження бронетанкового озброєння і техніки за п. 1 або п. 2, яка відрізняється тим, що контейнер для розміщення вказаного основного виконавчого агрегату в герметичному циліндровому корпусі виконаний у вигляді тонкостінного циліндра, на якому рівномірно по колу з кожного торця закріплені по три опори кочення.
6. Модульно структурована наземна допоміжна бойова робототехнічна машина супроводження бронетанкового озброєння і техніки за п. 1 або п. 2, яка відрізняється тим, що контейнер для розміщення вказаного основного виконавчого агрегату в герметичному циліндровому корпусі виконаний з двох плоских кільцевих основ та подовжніх жорстких ребер, скріплених у жорстку конструкцію.
7. Модульно структурована наземна допоміжна бойова робототехнічна машина супроводження бронетанкового озброєння і техніки за одним із пп. 1-5, яка відрізняється тим, що обидві бічні кришки зовнішнього циліндрового корпусу виконано конічними.
Текст
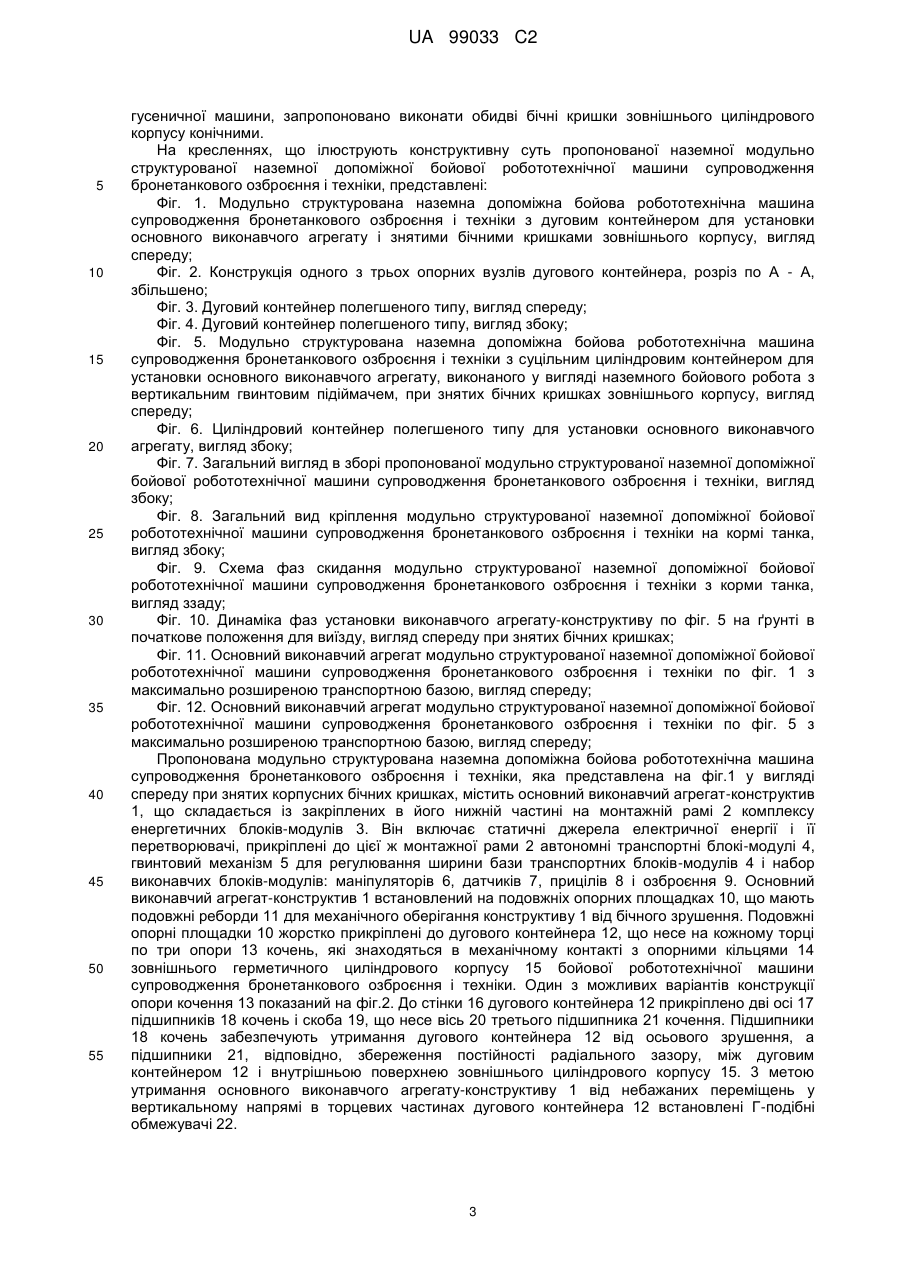
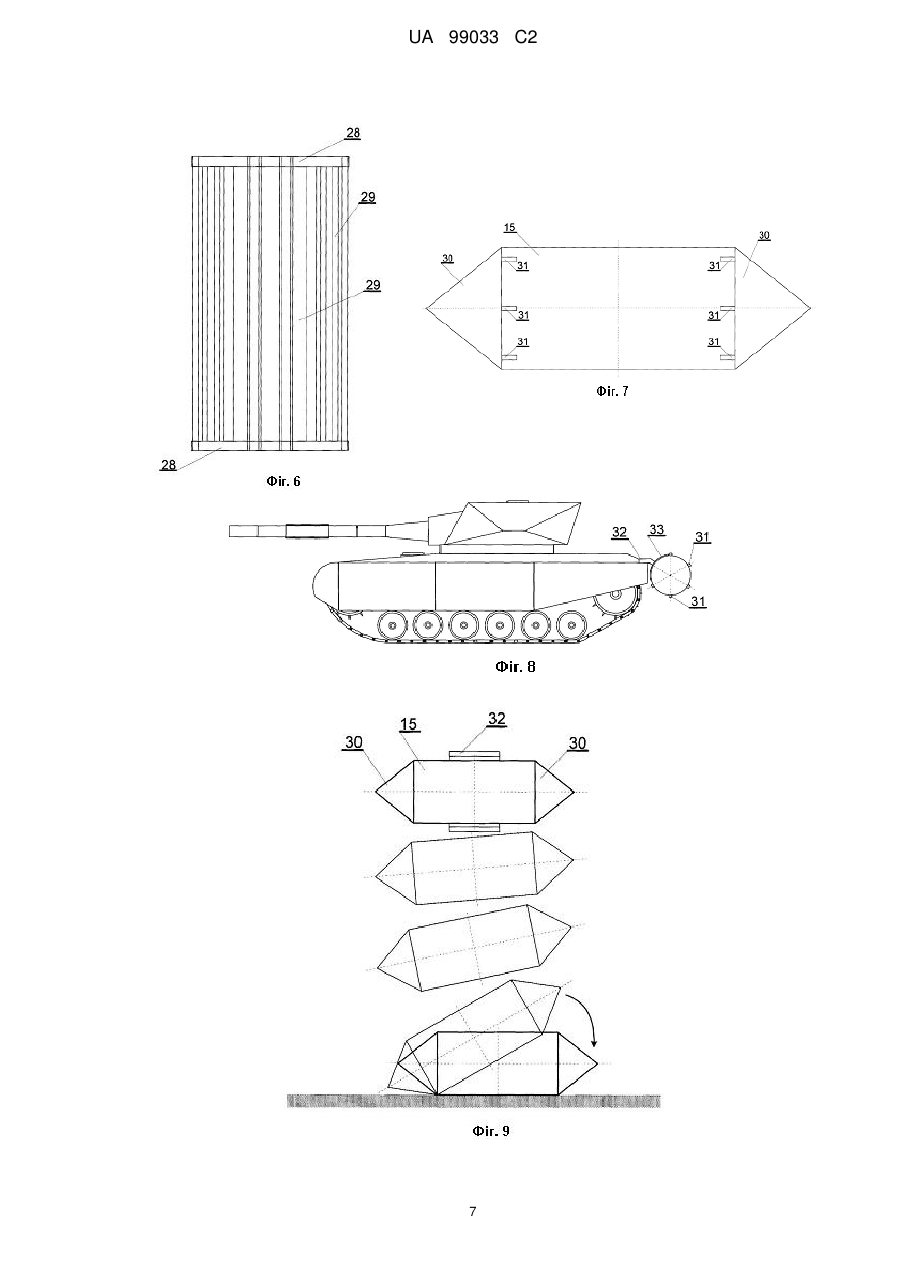
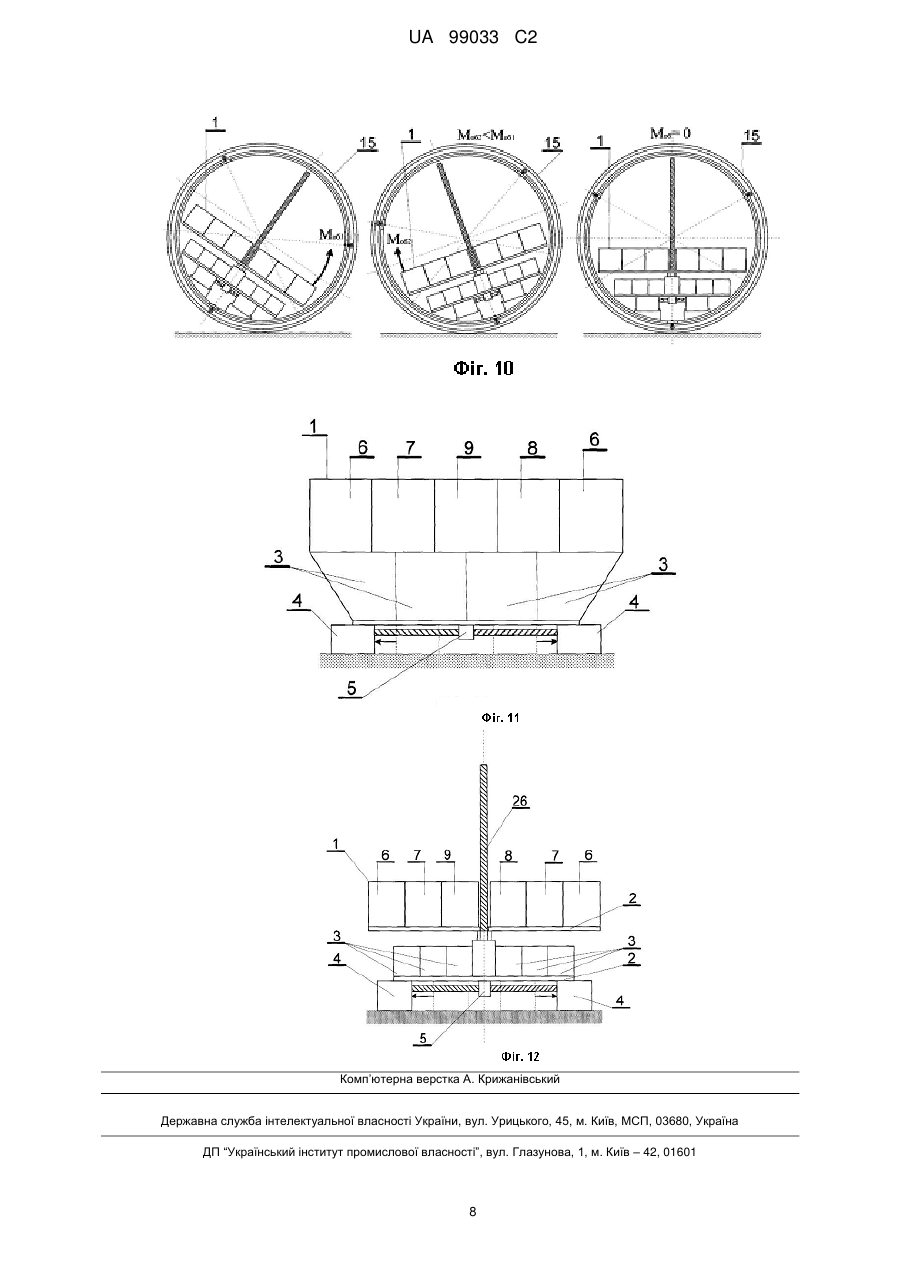
Реферат: Винахід належить до області військової техніки, а саме до спеціалізованих бойових робототехнічних наземних установок супроводження широкої номенклатури бронетанкового озброєння і техніки. Основний виконавчий агрегат пропонованої бойової робототехнічної машини виконаний відповідно до відомих конструктивних схем модульно структурованих бойових наземних роботів та розміщений в дуговому або циліндровому контейнері, який, у свою чергу, на опорах кочення встановлений усередині герметичного циліндрового корпусу, закритого з обох боків конусоподібними кришками. Центр тяжіння вказаного основного виконавчого агрегату знаходиться нижчим за центральну подовжню вісь зовнішнього циліндрового корпусу, що забезпечує виникнення обертального моменту, який повертає UA 99033 C2 (12) UA 99033 C2 внутрішній контейнер з основним виконавчим агрегатом в крайнє нижнє положення для подальшого виходу останнього на ґрунт після скидання циліндрового герметичного корпусу з супроводжуваної броньованої машини. Для відділення конічних бічних кришок від зовнішнього корпусу використані керовані піропатрони. Винахід дозволяє значно підвищити скритність і адаптацію до особливостей рельєфу місцевості при проведенні броньованими бойовими машинами бойових і спеціальних операцій, при цьому полегшуються умови технічного удосконалення на основі використання модульного принципу побудови. UA 99033 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до області військової техніки, а саме до спеціалізованих бойових робототехнічних наземних установок супроводження широкої номенклатури бронетанкового озброєння і техніки, і його може бути використано для забезпечення виконання вказаним видом озброєння сухопутних військ бойових і спеціальних завдань, що мають бути реалізовані як одиночними броньованими бойовими машинами, так і тими, що сумісно діють у складі їх підрозділів. До таких завдань, зокрема, можуть бути віднесені: - визначення параметрів водних перешкод, зокрема їх глибин, рельєфу дна, швидкостей течії та інших їх особливостей; - виявлення, знешкодження і ліквідація протитанкових мін, пророблення проходів в мінних полях; - розвідка бойових порядків вогняних і протитанкових засобів супротивника; - забезпечення евакуації бойової броньованої машини при застряванні; - евакуація поранених з бойових броньованих машин. Обставиною принципового значення тут є те, що унаслідок постійного зростання у всьому світі останніми роками числа локальних військових конфліктів, терористичних інцидентів і піратських актів, в які тим або іншим чином виявляються залученими найбільш розвинені в науково-технічному відношенні країни, практичне використання наземних військових робототехнічних пристроїв різко зросло, у зв'язку з тим, що їх застосування сприяє максимальному зниженню рівня людських втрат. Завдяки цьому до теперішнього часу вже накопичений великий об'єм теоретичних і експериментальних даних, що відносяться до аналізу безпосереднього застосування військових наземних роботів в реальних бойових і спеціальних операціях. Так, наприклад, відомі військові роботи, описані, в опублікованих в Інтернеті російським інформаційним виданням CitCity 06-07.11.2007 року матеріалах "Бойові сухопутні роботи" (см http://www citcity.ru), які достатньо широко застосовуються розвиненими в технічному відношенні країнами для виконання практично всіх функцій, описаних вище. У цих матеріалах виділяються американські військові роботи сімейства PacKBot, що застосовуються для розмінування, а так само роботи TAGS і REDOWL. У Ізраїлі, Великобританії і Германії розроблені і знайшли військове застосування рухомі гусеничні роботи для розвідки, розмінування і знищення вибухових пристроїв різного типу. Армія США під час бойових дій і поліцейських операцій в Іраку з успіхом використовувала озброєні вогнепальною зброєю малогабаритні гусеничні роботи в наступальних і розвідувальних операціях. Загальна кількість військових роботів, використаних армією США в Іраку до кінця 2008 року, досягала чотирьох тисяч одиниць. На державному рівні розробкою і практичним використанням військових роботів займаються в Росії, Франції, Великобританії і Японії. Відомі перспективні системи наземних бойових робототехнічних машин, які, починаючи з 2008 року, були розроблені в Україні співробітниками Наукового центру бойового застосування Сухопутних військ Військового інституту Одеського національного політехнічного університету. До теперішнього часу вони захищені п'ятьма патентами України на винаходи. До них належать, наприклад, патенти України №№ 87777 від 10.08.2009 p., 888333 від 25.11.2009 p., 88585 від 26.10.2009 р. і 90979 від 10.06.2010 р. На жаль, відомі до теперішнього часу системи сучасних бойових наземних роботів не можуть бути безпосередньо використані для вирішення бойових завдань, визначених вище для робототехнічних механізмів супроводу бронетанкового озброєння і техніки, по міркуваннях, які приведені далі. Як прототип пропонованої модульно структурованої наземної допоміжної бойової робототехнічної машини супроводження бронетанкового озброєння і техніки прийнятий "Модульно структурований військовий наземний робот з вертикальним гвинтовим підіймачем" згідно патенту України № 90969 від 10.06.2010 p., клас МПК(2009) F41H 7/00, автори Поповіченко О.В., Толстой О.В., Беліков В.Т., Васильєв В.В., Грачов М.М. Аналіз конструктивних особливостей як прототипу, так і реалізованих до теперішнього часу і описаних в спеціальній літературі і Інтернеті наземних військових роботів бойового і спеціального застосування, дозволяє зробити висновок про неможливість безпосереднього, прямого застосування подібних наземних роботів-прототипів як робототехнічні машини супроводу бронетанкового озброєння і техніки. Це обумовлено принциповим в цьому плані недоліком прототипу, який полягає в тому, що транспортування робототехнічної машинипрототипу до місця її бойового функціонування повинне бути проведено на борту супроводжуваної бойової гусеничної машини. Представляється повністю очевидним, що робототехнічна машина-прототип, так само як і інші модифікації цих бойових наземних роботів, 1 UA 99033 C2 5 10 15 20 25 30 35 40 45 50 55 60 практично не може бути безпосередньо скинута з корпусу броньованої бойової машини на ґрунт. При такому скиданні робототехнічної машини-прототипу з борту, наприклад, танка безпосередньо на ґрунт абсолютно неминуча поява істотних пошкоджень механізмів не тільки ходової частини або аналогічних пошкоджень електричних ланцюгів, але і виконавчих механізмів, що виконують основні функції робототехнічної машини супроводу бронетанкової техніки. Крім того, очевидно, що в цьому випадку вельми мала вірогідність надійного попадання опорних коліс шасі робототехнічної машини супроводження на ґрунт, що гарантує її повноцінне функціонування після відділення від супроводжуваної броньованої машини і приземлення. З метою усунення цього принципового недоліку прототипу запропонована конструкція модульно структурованої наземної допоміжної бойової робототехнічної машини супроводження бронетанкового озброєння і техніки, основний агрегат якої містить енергетичний блок-модуль у вигляді комплекту статичних джерел електричної енергії електрохімічного, конденсаторного або комбінованого типу, статичні перетворювачі електроенергії, електромеханічні колісні, гусеничні або колісно-гусеничні рушії у вигляді автономних транспортних блоків-модулів, комплекси датчиків системи тягового електроприводу, зовнішньої обстановки і діагностики, а так само комплект блоків-модулів виконавчих механізмів, зокрема маніпуляторів, систем озброєння, модульних автономних блоків-модулів спостереження і розвідки і механізмів самоліквідації, і встановлений з фіксацією від бічного зрушення на подовжніх плоских опорних площадках, закріплених в дуговому контейнері, забезпеченому комплектом з трьох опор кочення, встановлених з кожного торця дугового контейнера, усередині герметичного циліндрового металевого або композитного корпусу з бічними кришками, прикріпленого з можливістю керованого відділення на зовнішній поверхні супроводжуваної броньованої машини, причому центр тяжіння вказаної робототехнічної машини знаходиться нижчим за подовжню вісь зовнішнього герметичного корпусу на відстані, рівній не менше одній третині його радіусу. У зв'язку з тим, що необхідність установки основного виконавчого агрегату модульно структурованої наземної допоміжної бойової робототехнічної машини супроводження бронетанкового озброєння і техніки усередині контейнера, розміщеного в зовнішньому циліндровому корпусі, приводить до конструктивної необхідності максимального зближення один з одним по ширині автономних транспортних блоків-модулів. Очевидно, що це приводить до істотного зменшення ширини бази опорних коліс цих функціональних блоків-модулів, і, відповідно, стійкості вказаного агрегату на ґрунті. Для збереження високої стійкості виконавчого агрегату при його русі на ґрунті запропоновано встановити на вказаному агрегаті спеціальний гвинтовий механізм регулювання ширини бази опорних коліс, який здатен забезпечити її максимальне збільшення. Для того, щоб здійснити надійне, кероване членами екіпажа броньованої гусеничної машини, відділення бічних кришок, які закривають зовнішній герметичний циліндровий корпус, що забезпечує гарантований виїзд основного виконавчого агрегату пропонованої робототехнічної машини супроводу із зовнішнього циліндрового корпусу на ґрунт, запропоновано встановити у вузлах кріплення бічних кришок герметичного циліндрового корпусу піропатрони для дистанційно керованого або автоматизованого відділення вказаних кришок від вказаного корпусу. З метою зменшення загальної маси пропонованої робототехнічної машини супроводження бронетанкового озброєння і техніки запропоновано виконати внутрішній дуговий контейнер для розміщення виконавчого агрегату вказаної робототехнічної машини в герметичному циліндровому корпусі у вигляді конструктиву з двох плоских торцевих дугових основ, які об'єднані в жорсткий дуговий елемент за допомогою набору подовжніх жорстких ребер. Подальше підвищення надійності бойового функціонування модульно структурованої наземної допоміжної бойової робототехнічної машини супроводження бронетанкового озброєння і техніки, яка пропонується, досягнуте завдяки тому, що внутрішній контейнер для розміщення вказаної робототехнічної машини в герметичному циліндровому корпусі виконаний у вигляді тонкостінного циліндра, на якому рівномірно по колу з кожного торця закріплено по три опори кочення. В цьому випадку зниження загальної маси модульно структурованої наземної допоміжної бойової робототехнічної машини супроводу бронетанкового озброєння і техніки, яка пропонується, так само може бути реалізоване тим, що контейнер для розміщення вказаної робототехнічної машини в герметичному циліндровому корпусі виконаний з двох плоских кільцевих основ і комплекту подовжніх жорстких ребер, скріплених у цілу конструкцію. Для того, щоб забезпечити надійне попадання модульно структурованої наземної допоміжної бойової робототехнічної машини супроводження бронетанкового озброєння і техніки, яка пропонується, на ґрунт в горизонтальному положенні для забезпечення гарантованого виїзду виконавчого агрегату після скидання її з корпусу супроводжуваної бойової 2 UA 99033 C2 5 10 15 20 25 30 35 40 45 50 55 гусеничної машини, запропоновано виконати обидві бічні кришки зовнішнього циліндрового корпусу конічними. На кресленнях, що ілюструють конструктивну суть пропонованої наземної модульно структурованої наземної допоміжної бойової робототехнічної машини супроводження бронетанкового озброєння і техніки, представлені: Фіг. 1. Модульно структурована наземна допоміжна бойова робототехнічна машина супроводження бронетанкового озброєння і техніки з дуговим контейнером для установки основного виконавчого агрегату і знятими бічними кришками зовнішнього корпусу, вигляд спереду; Фіг. 2. Конструкція одного з трьох опорних вузлів дугового контейнера, розріз по А - А, збільшено; Фіг. 3. Дуговий контейнер полегшеного типу, вигляд спереду; Фіг. 4. Дуговий контейнер полегшеного типу, вигляд збоку; Фіг. 5. Модульно структурована наземна допоміжна бойова робототехнічна машина супроводження бронетанкового озброєння і техніки з суцільним циліндровим контейнером для установки основного виконавчого агрегату, виконаного у вигляді наземного бойового робота з вертикальним гвинтовим підіймачем, при знятих бічних кришках зовнішнього корпусу, вигляд спереду; Фіг. 6. Циліндровий контейнер полегшеного типу для установки основного виконавчого агрегату, вигляд збоку; Фіг. 7. Загальний вигляд в зборі пропонованої модульно структурованої наземної допоміжної бойової робототехнічної машини супроводження бронетанкового озброєння і техніки, вигляд збоку; Фіг. 8. Загальний вид кріплення модульно структурованої наземної допоміжної бойової робототехнічної машини супроводження бронетанкового озброєння і техніки на кормі танка, вигляд збоку; Фіг. 9. Схема фаз скидання модульно структурованої наземної допоміжної бойової робототехнічної машини супроводження бронетанкового озброєння і техніки з корми танка, вигляд ззаду; Фіг. 10. Динаміка фаз установки виконавчого агрегату-конструктиву по фіг. 5 на ґрунті в початкове положення для виїзду, вигляд спереду при знятих бічних кришках; Фіг. 11. Основний виконавчий агрегат модульно структурованої наземної допоміжної бойової робототехнічної машини супроводження бронетанкового озброєння і техніки по фіг. 1 з максимально розширеною транспортною базою, вигляд спереду; Фіг. 12. Основний виконавчий агрегат модульно структурованої наземної допоміжної бойової робототехнічної машини супроводження бронетанкового озброєння і техніки по фіг. 5 з максимально розширеною транспортною базою, вигляд спереду; Пропонована модульно структурована наземна допоміжна бойова робототехнічна машина супроводження бронетанкового озброєння і техніки, яка представлена на фіг.1 у вигляді спереду при знятих корпусних бічних кришках, містить основний виконавчий агрегат-конструктив 1, що складається із закріплених в його нижній частині на монтажній рамі 2 комплексу енергетичних блоків-модулів 3. Він включає статичні джерела електричної енергії і її перетворювачі, прикріплені до цієї ж монтажної рами 2 автономні транспортні блокі-модулі 4, гвинтовий механізм 5 для регулювання ширини бази транспортних блоків-модулів 4 і набор виконавчих блоків-модулів: маніпуляторів 6, датчиків 7, прицілів 8 і озброєння 9. Основний виконавчий агрегат-конструктив 1 встановлений на подовжніх опорних площадках 10, що мають подовжні реборди 11 для механічного оберігання конструктиву 1 від бічного зрушення. Подовжні опорні площадки 10 жорстко прикріплені до дугового контейнера 12, що несе на кожному торці по три опори 13 кочень, які знаходяться в механічному контакті з опорними кільцями 14 зовнішнього герметичного циліндрового корпусу 15 бойової робототехнічної машини супроводження бронетанкового озброєння і техніки. Один з можливих варіантів конструкції опори кочення 13 показаний на фіг.2. До стінки 16 дугового контейнера 12 прикріплено дві осі 17 підшипників 18 кочень і скоба 19, що несе вісь 20 третього підшипника 21 кочення. Підшипники 18 кочень забезпечують утримання дугового контейнера 12 від осьового зрушення, а підшипники 21, відповідно, збереження постійності радіального зазору, між дуговим контейнером 12 і внутрішньою поверхнею зовнішнього циліндрового корпусу 15. 3 метою утримання основного виконавчого агрегату-конструктиву 1 від небажаних переміщень у вертикальному напрямі в торцевих частинах дугового контейнера 12 встановлені Г-подібні обмежувачі 22. 3 UA 99033 C2 5 10 15 20 25 30 35 40 45 50 55 60 На фігурах 3 і 4 представлена конструктивна схема полегшеного варіанту конструкції дугового контейнера 12. В цьому випадку він складається з плоских торцевих дуг 23, об'єднаних в жорсткий конструктив за допомогою подовжніх стрижнів 24. На цих кресленнях вузли 13 опорних підшипників кочення не показано. На фіг. 5 у вигляді спереду із знятими бічними конічними кришками показана конструкція пропонованої модульно структурованої наземної допоміжної бойової робототехнічної машини супроводження бронетанкового озброєння і техніки, внутрішній контейнер якої виконаний у вигляді тонкостінного металевого або композитного циліндра 25. На внутрішній поверхні циліндра 25 закріплені подовжні площадки 10 для фіксації основного виконавчого агрегатуконструктиву 1, забезпеченого гвинтовим підіймачем 26 і обмежувачі 27, що перешкоджають зрушенню агрегату-конструктиву 1 у вертикальному напрямі. На торцях зовнішньої поверхні останнього рівномірно по колу встановлено по три опорні вузли 13 з підшипниками кочення. На фіг. 6 у вигляді зверху представлена конструкція полегшеного контейнера, виконаного на основі плоских кільцевих основ 28, розміщених на його торцях. Об'єднання кільцевих підстав в жорсткий конструктив реалізоване за допомогою жорстких подовжніх стрижнів 29. На фіг. 6 вузли 13 опорних підшипників кочення не показано. На фіг. 7 представлений у вигляді збоку загальний вигляд в зборі пропонованої модульно структурованої наземної допоміжної бойової робототехнічної машини супроводження бронетанкового озброєння і техніки. Герметизація внутрішнього об'єму циліндрового корпусу 15 реалізована за допомогою конічних кришок 30. Така конструкція цих кришок 30 пропонованої бойової робототехнічної машини надійно забезпечує горизонтальне положення її зовнішнього корпусу на ґрунті після скидання з супроводжуваної бронетехніки. Очевидно, що це, у свою чергу, гарантує чіткий виїзд основного виконавчого агрегату-конструктиву 1 з корпусу 15 після відстрілу кришок 30 піропатронами 31 з метою подальшого надійного функціонування робота в бойових умовах. На фіг. 8 представлений приклад закріплення модульно структурованої наземної допоміжної бойової робототехнічної машини супроводження бронетанкового озброєння і техніки на кормі танка. Циліндровий корпус 15 закріплений на кронштейні 32 в дугових затискачах 33. Розкриття затискачів 33 проводиться по команді оператора бойової робототехнічної машини, танка, що знаходиться усередині. На фіг.9 у вигляді окремих фаз представлений приклад скидання пропонованої бойової робототехнічної машини супроводу бронетанкової техніки з корми танка. Виразно видно, що, завдяки наявності конічних бічних кришок 30 зовнішнього циліндрового контейнера 15, останній зрештою опиниться на ґрунті в горизонтальному положенні, що найкращим чином забезпечує керований виїзд основного виконавчого агрегату-конструктиву 1 на ґрунт. На фіг. 10 показані фази установки основного виконавчого агрегату-конструктиву 1 в крайнє нижнє положення після коливань, обумовлених обертанням циліндрового корпусу 15 на ґрунті після скидання бойової робототехнічної машини з машини-транспортера. Видно, що момент, що обертає, М, що діє на агрегат-конструктив 1 і що виникає унаслідок того, що його центр тяжіння знаходиться значно нижчим за подовжню вісь зовнішнього циліндрового корпусу 15, діє у напрямі повернення конструктиву 1 в крайнє нижнє положення. Як вже було вказано вище, саме це просторове положення основного виконавчого агрегату-конструктиву 1 гарантує його надійний виїзд з контейнерів 12, 25 і 15 на ґрунт для виконання бойових завдань. На фігурах 11 і 12 представлено основні, відповідні фігурам 1 і 5, виконавчі агрегатиконструктиви 1, такі, що повністю виїхали на ґрунт з скинутого з броньованої машини зовнішнього корпусу 15 при максимальному збільшенні ширини бази транспортних блоківмодулів 4, здійсненому за допомогою гвинтових механізмів 8. Пропонована модульно структурована наземна допоміжна бойова робототехнічна машина супроводження бронетанкового озброєння і техніки працює таким чином. На підготовчому етапі з наявного повного набору функціональних блоків-модулів 4, 5, 6, 7, 8 і 9, зразковий перелік яких приведений на с. 3, проводиться вибір тих з них, які необхідні для повноцінного виконання комплексу конкретних завдань супроводу бронетехніки, визначених бойовим завданням. Виходячи з цього, залежно від особливостей рельєфу місцевості майбутньої операції і фізичних характеристик її ґрунтів, основний виконавчий агрегат-конструктив 1 повинен бути забезпечений парою автономних електромеханічних транспортних блоків-модулів 4 колісного, гусеничного або комбінованого типу. Після цього проводиться монтаж основного виконавчого агрегатуконструктиву 1 і тестування його готовності до бойового застосування. Далі основний виконавчий агрегат-конструктив 1 встановлюється і фіксується в одному вибраному з набору внутрішніх контейнерів 12 і 25, який, у свою чергу, встановлюється на опорних вузлах 13 кочень усередині зовнішнього циліндрового корпусу 15. Остаточний вигляд після монтажу пропонована 4 UA 99033 C2 5 10 модульно структурована наземна допоміжна бойова робототехнічна машина супроводження бронетанкового озброєння і техніки набуває після установки бічних конічних кришок 30 з піропатронами 31. Повністю готова до транспортування на борту бронетанкової техніки наземна бойова робототехнічна машина встановлюється, наприклад, на танку в затискачах 33 кронштейну 32, як це показано на фіг. 7. У загальному випадку, при виконанні бойового завдання підрозділом броньованих машин пропонованими модульно структурованими наземними допоміжними бойовими робототехнічними машинами супроводження бронетанкової техніки можуть, залежно від складності бойової обстановки, забезпечено декілька машин, цього підрозділу. Практичне використання вказаних робототехнічних машин полягає в їх керованому операторами, що входять в екіпажі бойових броньованих машин, скиданні машин з кронштейна 32 і затискачів 33 на ґрунт, відстрілі піропатронами 31 бічних конічних кришок 30 від зовнішніх корпусів 15, виїзді основних виконавчих агрегатів-конструктивів 1 на ґрунт і їх керованому або автономному виконанні завдань, приведених вище на с. 1. 15 ФОРМУЛА ВИНАХОДУ 20 25 30 35 40 45 50 55 60 1. Модульно структурована наземна допоміжна бойова робототехнічна машина супроводження бронетанкового озброєння і техніки, основний виконавчий агрегат якої складається з енергетичного блока-модуля у вигляді комплекту статичних джерел електричної енергії електрохімічного, конденсаторного або комбінованого типу, статичних перетворювачів електроенергії, електромеханічних колісних, гусеничних або колісно-гусеничних рушіїв у вигляді автономних транспортних блоків-модулів, комплексів датчиків системи тягового електроприводу, зовнішньої обстановки і діагностики, а також комплекту блоків-модулів виконавчих механізмів, зокрема маніпуляторів, систем озброєння, модульних автономних блоків-модулів спостереження і розвідки та механізмів самоліквідації, яка відрізняється тим, що її основний виконавчий агрегат встановлений з фіксацією від бічного зміщення на подовжніх плоских опорних площадках, закріплених у контейнері, який встановлений за допомогою оснащених з кожного його торця комплектів з трьох опор кочення усередині герметичного циліндрового металевого або композитного корпусу, виконаного з можливістю закріплення та керованого відділення від зовнішньої поверхні супроводжуваного бронетанкового озброєння і техніки, при цьому центр тяжіння вказаної робототехнічної машини знаходиться нижче за подовжню вісь зовнішнього герметичного корпусу на відстані, рівній не менше однієї третини його радіусу. 2. Модульно структурована наземна допоміжна бойова робототехнічна машина супроводження бронетанкового озброєння і техніки за п. 1, яка відрізняється тим, що її основний виконавчий агрегат оснащений гвинтовим механізмом регулювання ширини бази опорних коліс автономних транспортних блоків-модулів. 3. Модульно структурована наземна допоміжна бойова робототехнічна машина супроводження бронетанкового озброєння і техніки за п. 1, яка відрізняється тим, що у вузлах кріплення бічних кришок герметичного циліндрового корпусу встановлені піропатрони для дистанційно керованого або автоматизованого відділення вказаних кришок від корпусу. 4. Модульно структурована наземна допоміжна бойова робототехнічна машина супроводження бронетанкового озброєння і техніки за п. 1 або п. 2, яка відрізняється тим, що контейнер для розміщення вказаного основного виконавчого агрегату в герметичному циліндровому корпусі виконаний у вигляді дуги з двох плоских торцевих дугових основ, які об'єднані в жорстку конструкцію за допомогою набору подовжніх жорстких ребер. 5. Модульно структурована наземна допоміжна бойова робототехнічна машина супроводження бронетанкового озброєння і техніки за п. 1 або п. 2, яка відрізняється тим, що контейнер для розміщення вказаного основного виконавчого агрегату в герметичному циліндровому корпусі виконаний у вигляді тонкостінного циліндра, на якому рівномірно по колу з кожного торця закріплені по три опори кочення. 6. Модульно структурована наземна допоміжна бойова робототехнічна машина супроводження бронетанкового озброєння і техніки за п. 1 або п. 2, яка відрізняється тим, що контейнер для розміщення вказаного основного виконавчого агрегату в герметичному циліндровому корпусі виконаний з двох плоских кільцевих основ та подовжніх жорстких ребер, скріплених у жорстку конструкцію. 7. Модульно структурована наземна допоміжна бойова робототехнічна машина супроводження бронетанкового озброєння і техніки за одним із пп. 1-5, яка відрізняється тим, що обидві бічні кришки зовнішнього циліндрового корпусу виконано конічними. 5 UA 99033 C2 6 UA 99033 C2 7 UA 99033 C2 Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 8
ДивитисяДодаткова інформація
Назва патенту англійськоюModular supplementary surface fighting robotic machine for accompanying armored ammunition and equipment
Автори англійськоюBelikov Viktor Tryfonovych, Borysiuk Mykhailo Demianovych, Diachenko Oleksandr Feodosiovych, Klymenko Vadym Mykolaiovych, Leschenko Oleh Ivanovych, Maheramov Liutfalii Kurban-Aliievych, Tolstoi Oleksii Volodymyrovych, Yanchyk Oleksandr Hryhorovych
Назва патенту російськоюМодульно структурированная вспомогательная наземная боевая робототехническая машина сопровождения бронетанкового вооружения и техники
Автори російськоюБеликов Виктор Трифонович, Борисюк Михаил Демьянович, Дьяченко Александр Феодосиевич, Клименко Вадим Николаевич, Лещенко Олег Иванович, Магерамов Лютфалий Курбан-Алиевич, Толстой Алексей Владимирович, Янчик Александр Григорьевич
МПК / Мітки
МПК: B65D 85/68, F41H 7/02
Мітки: модульної, машина, допоміжна, техніки, наземна, робототехнічна, бронетанкового, озброєння, супроводження, структурована, бойова
Код посилання
<a href="https://ua.patents.su/10-99033-modulno-strukturovana-dopomizhna-nazemna-bojjova-robototekhnichna-mashina-suprovodzhennya-bronetankovogo-ozbroehnnya-i-tekhniki.html" target="_blank" rel="follow" title="База патентів України">Модульно структурована допоміжна наземна бойова робототехнічна машина супроводження бронетанкового озброєння і техніки</a>
Модульно-структурована допоміжна наземна бойова робототехнічна машина прихованого супроводження розвідників
Номер патенту: 95730
Опубліковано: 25.08.2011
Автори: Беліков Віктор Тріфонович, Клименко Вадим Миколайович, Толстой Олексій Володимирович, Поповіченко Олександр Вікторович, Васильєв Валерій Валентинович
МПК: F41H 7/00
Мітки: прихованого, розвідників, супроводження, бойова, модульно-структурована, допоміжна, робототехнічна, наземна, машина
Формула / Реферат:
1. Модульно-структурована допоміжна наземна бойова робототехнічна машина скритного супроводження розвідників, що складається з одного або двох силових блоків-модулів, забезпечених електрохімічними, конденсаторними або комбінованими джерелами електричної енергії, її перетворювачами для живлення тягових електричних двигунів гусеничного рушія і решти споживачів електричної енергії, комплексом датчиків системи тягового електроприводу, зовнішньої...
Допоміжна наземна бойова робототехнічна машина прихованого супроводу розвідників з повністю автономними транспортними блоками-модулями

Номер патенту: 96693
Опубліковано: 25.11.2011
Автори: Васильєв Валерій Валентинович, Толстой Олексій Володимирович, Клименко Вадим Миколайович, Беліков Віктор Тріфонович, Поповіченко Олександр Вікторович
МПК: F41H 7/00
Мітки: блоками-модулями, робототехнічна, повністю, наземна, автономними, транспортними, розвідників, допоміжна, супроводу, прихованого, бойова, машина
Формула / Реферат:
1. Наземна допоміжна бойова робототехнічна машина прихованого супроводу розвідників з повністю автономними транспортними блоками-модулями, що складається з набору шарнірно об'єднаних транспортних візків-траків у вигляді плоских платформ з кронштейнами, що несуть опорні колеса візків-траків, сполучених шарнірами, елементів електроживлення електрохімічного або накопичувального типу у вигляді суперконденсаторів, перетворювачів електроенергії,...
Бойова броньована машина

Номер патенту: 7709
Опубліковано: 15.07.2005
Автор: Куперман Леонід Мойсейович
МПК: F41H 7/02
Мітки: машина, бойова, броньована
Формула / Реферат:
1. Бойова броньована машина, зокрема бойова машина вогневого супроводження та підтримки танків та їх протиповітряного захисту, що містить рухомий корпус, наприклад, з гусеничним рушієм і силовим відділенням, в якому розміщені двигун і трансмісія з обслуговуючими їх системами та обладнанням і який має один чи більше відсіків - багатокутових у плані рубок, причому рубки відокремлені в основному вертикальними стінками, покрівлею рубок та днищем...
Бойова машина

Номер патенту: 7669
Опубліковано: 15.07.2005
Автор: Писаренко Анатолій Євменович
Формула / Реферат:
Бойова машина, що містить корпус, який зварений із броньованих листів і має прорізи люків, з виконаними по периметру окантовками та захисними екранами, що закриваються кришками з розмірами, відповідними розмірам прорізів, яка відрізняється тим, що захисні екрани виконано спільно з листами корпусу у вигляді вертикальних ребер, під якими розташовані краї Г-подібного профілю окантовок.
Бойова машина вогневої підтримки

Номер патенту: 54965
Опубліковано: 25.11.2010
Автор: Стрижевський Володимир В'ячеславович
МПК: F41H 7/02, F41H 5/00, F41H 7/04
Мітки: вогневої, машина, бойова, підтримки
Формула / Реферат:
Бойова машина вогневої підтримки, яка містить броньований корпус, який розділено поперечними перегородками на відділення управління, силове відділення, бойове відділення, яке розташовано безпосередньо за силовим відділенням, що містить уніфікований бойовий модуль з далекобійними системами важкого озброєння, вантажне відділення, яка відрізняється тим, що вона додатково містить гондолу уніфікованого озброєння ГУВ-ІІ, прицільно-спостережний...
Попередній патент: Сидіння
Наступний патент: Пристрій для визначення міри засміченості фільтрів
Випадковий патент: Спосіб подрібнення матеріалів