Спосіб визначення швидкості обертання осесиметричного вібруючого датчика та інерційний пристрій для здійснення вищезгаданого способу
Формула / Реферат
1. Спосіб визначення швидкості обертання осесиметричного вібруючого датчика (7), що містить коливальний елемент (1), пов'язаний з електродами (4) керування і детекторними електродами (5), для створення коливань, спотворення яких має періодичність порядку n і положення (Θ) яких змінюється залежно від обертання датчика, який відрізняється тим, що містить наступні етапи:
проводять оцінку швидкості обертання послідовно для числа N положень коливань по відношенню до електродів, при цьому положення геометрично зміщують на заздалегідь визначений кут і коливання зміщують від одного положення до іншого шляхом подачі команди прецесії з використанням заздалегідь встановленого масштабного коефіцієнта;
визначають середнє значення з оцінок швидкості обертання в N положеннях;
при цьому число N положень і кут, що розділяє положення, визначають так, щоб середнє значення вказаних оцінок дозволяло усунути принаймні одну складову гармонійного відходу коливань.
2. Спосіб за п. 1, який відрізняється тим, що оцінку швидкості проводять для N положень коливань, при цьому кутові зсуви між положеннями пов'язані з числом N положень і з порядком n модального спотворення коливань співвідношенням: кутовий зсув між положеннями дорівнює 2π/Nn.
3. Спосіб за п. 1, який відрізняється тим, що оцінку швидкості проводять для двох положень коливань, а саме, для першого положення (Θ0) і для другого положення, зміщеного на кут π/n відносно першого положення.
4. Спосіб за п. 2, який відрізняється тим, що оцінку швидкості здійснюють для двох додаткових положень коливань, а саме, для положень, геометрично зміщених на π/2n і на 3π/2n відносно першого положення.
5. Спосіб за п. 1, який відрізняється тим, що оцінку швидкості проводять для трьох положень коливань, а саме, для першого положення (Θ0), другого положення, зміщеного на кут 2π/3n відносно першого положення, і для третього положення, зміщеного на 4π/3n відносно першого положення.
6. Спосіб за всіма або за частиною попередніх пунктів, який відрізняється тим, що містить попередній етап подачі команди на збудження коливань в кутових положеннях, які вибирають так, щоб відповідний сигнал, що детектується, мав значення не рівне нулю.
7. Спосіб за всіма або за частиною попередніх пунктів, який відрізняється тим, що містить наступні етапи:
здійснюють порівняння (22) між командою прецесії і відповідною зміною дійсного кута, і
на його підставі виводять оновлене значення (23) масштабного коефіцієнта.
8. Спосіб за всіма або за частиною попередніх пунктів, який відрізняється тим, що містить наступні етапи:
вимірюють (18) зміни швидкості обертання датчика, і здійснюють алгебраїчну дедукцію, виходячи із виміряних змін при усереднюванні оцінок швидкості обертання.
9. Інерційний пристрій, який містить осесиметричний вібруючий датчик (7), що включає коливальний елемент (1), пов'язаний з електродами (4) керування і детекторними електродами (5), засоби (б) збудження датчика для генерування коливань, який відрізняється тим, що містить засоби для оцінки (9) швидкості обертання датчика для кожного з N положень коливань відносно електродів, засоби для керування прецесією (10) з використанням заздалегідь встановленого масштабного коефіцієнта, поки коливання не дійдуть до кожного з N положень, і засоби для визначення середнього значення (15) з оцінок швидкості обертання датчика в N положеннях коливань.
10. Пристрій за п. 9, який відрізняється тим, що оцінку швидкості проводять для N положень коливань, при цьому кутові зсуви між положеннями пов'язані з числом N положень і з порядком n модального спотворення коливань співвідношенням: кутовий зсув між положеннями дорівнює 2π/Nn.
11. Пристрій за п. 10, який відрізняється тим, що оцінку проводять для двох положень коливань, а саме для першого положення (Θ0) і для другого положення, зміщеного на кут π/n відносно першого положення.
12. Пристрій за п. 11, який відрізняється тим, що оцінку швидкості здійснюють для двох додаткових положень коливань, геометрично зміщених на π/2n і на 3π/2n відносно першого положення.
13. Пристрій за п. 12, який відрізняється тим, що оцінку швидкості проводять для трьох положень коливань, а саме, для першого положення (Θ0), другого положення, зміщеного на кут 2π/3n відносно першого положення, і для третього положення, зміщеного на 4π/3n відносно першого положення.
14. Пристрій за п. 9, який відрізняється тим, що
містить:
засоби для порівняння (22) між кожною командою прецесії і відповідною зміною дійсного кута, і
засоби для визначення оновленого значення (23) масштабного коефіцієнта.
15. Пристрій за п. 9, який відрізняється тим, що містить:
засоби (19) для вимірювання змін швидкості обертання датчика, і
засоби для виконання алгебраїчної дедукції, виходячи із виміряних змін під час усереднювання оцінок швидкості обертання.
Текст
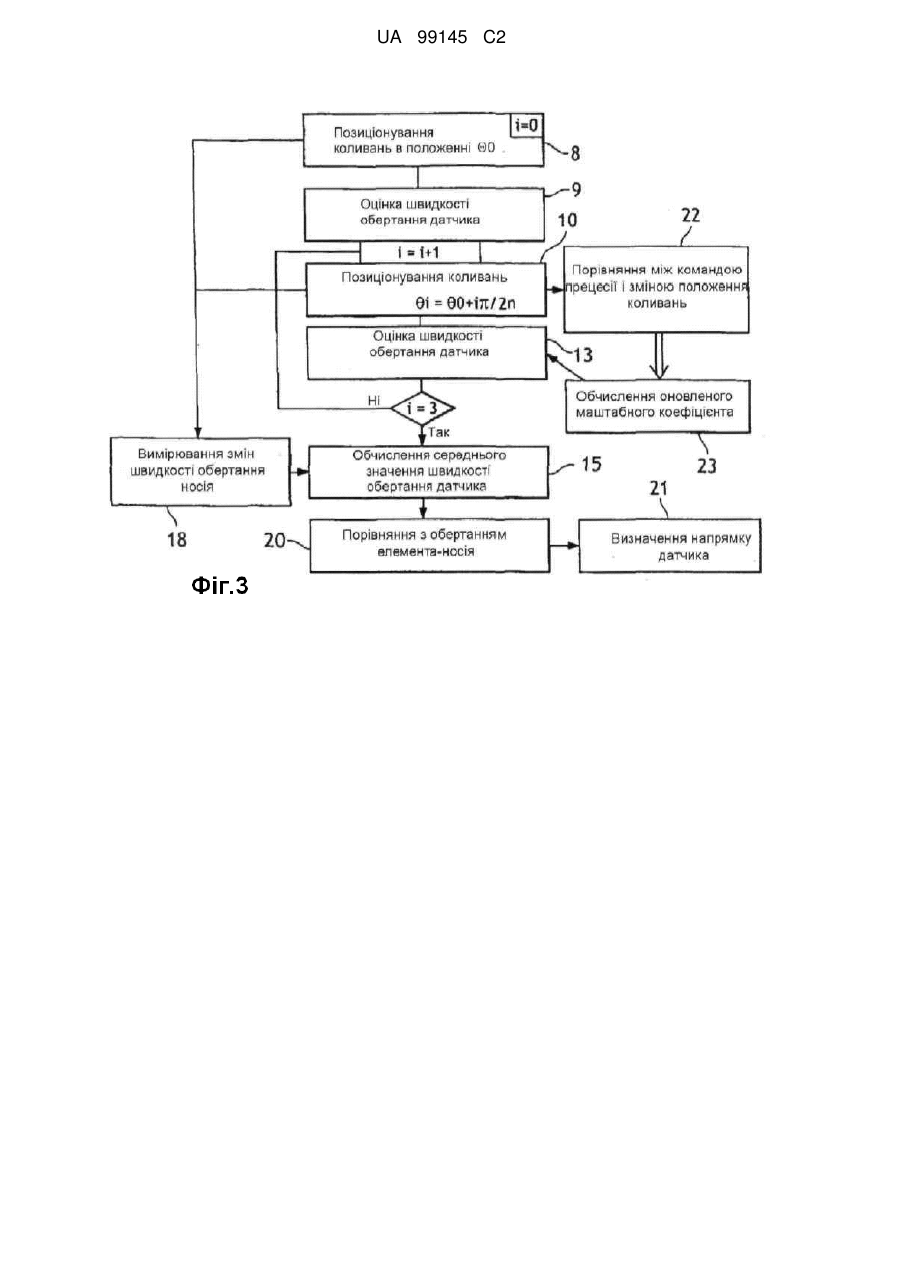
Реферат: Спосіб визначення швидкості обертання осесиметричного вібруючого датчика (7), що містить коливальний елемент (1), пов'язаний з електродами (4) керування і детекторними електродами (5), для створення коливань, спотворення яких має періодичність порядку n і положення (Θ) яких міняється залежно від обертання датчика. Спосіб містить наступні етапи: оцінку швидкості обертання послідовно для числа N положень коливань по відношенню до електродів, при цьому положення геометрично зміщують на заздалегідь визначений кут і коливання зміщують від одного положення до іншого шляхом подачі команди прецесії з використанням заздалегідь встановленого масштабного коефіцієнта; визначають середнє значення з оцінок швидкості обертання для N положень, при цьому число N положень і кут, що розділяє положення, визначають так, щоб середнє значення оцінок дозволяло усунути принаймні одну компоненту гармонійного відходу коливань. UA 99145 C2 (12) UA 99145 C2 UA 99145 C2 5 10 15 20 25 30 35 40 45 50 55 60 Цей винахід відноситься до способу визначення швидкості обертання осесиметричного вібруючого датчика і відповідного інерційного пристрою, що містить осесиметричний вібруючий датчик. Зокрема, винахід відноситься до датчиків з відходом кутового положення коливань, гармонійно залежним від вказаного положення коливань відносно корпусу приладу. Відомо, що для визначення напряму носія, зокрема, для забезпечення навігації літака можна використовувати інерційний пристрій, що містить один або декілька осесиметричних вібруючих датчиків, які використовують резонатор, що має симетрію четвертого порядку і більше і що реалізовує дві вироджені моди коливань, ідентичні і ортогональні, такі, що дають спотворення, яке має періодичність порядку n по відношенню до осі симетрії, тобто спотворення має n разів одну і ту ж картину коливань за один оборот навколо осі симетрії. Зокрема, відоме використання датчиків другого порядку, таких як вібруючі датчики з півсферичним ковпаком, що містять відповідне число електродів, або «quapasons», в яких напрями коливань двох мод не є геометрично ортогональними, але є модальна ортогональними, тобто модально зміщеними на . Відомо також, що осесиметричний вібруючий датчик призначений для роботи в режимі гіроскопа або в режимі пірометра. У режимі гіроскопа підтримують коливання, але їх положення залишають вільним; коли напрям носія міняється, положення коливань відносно основи характеризує кут, на який обернувся носій. У режимі гірометра підтримують коливання, і їх положення відносно основи зберігають нерухомим шляхом подачі відповідних команд на електронну схему; величина команди в цьому випадку характеризує швидкість обертання носія в інерційному просторі. Відомо також, що вібруючі гіроскопи мають погрішність відходу, яка при роботі гіроскопа в режимі гіроскопа виражається в зміні положення коливань, навіть коли носій не здійснює ніякого повороту. Цей відхід містить дві складові: постійну складову, яка у разі півсферичного резонансного гіроскопа складає порядка декілька сотих градуса в годину, і складову, звану «альтернативним» відходом, яка складається з гармонік» в основному з гармоніки того ж порядку n, що і вібруючий датчик, і з гармоніки порядку, що перевищує в два рази порядок вібруючого датчика, і є залежною від положення коливань. У разі півсферичного резонансного гіроскопа гармоніка порядку n викликає погрішність відходу порядку одного градуса в годину, а гармоніка порядку 2n викликає погрішність відходу порядку однієї десятої градуса в годину. Як відомо, калібрування гіроскопів здійснюють в заводських умовах і складають таблиці поправок, які можна застосовувати під час використання гіроскопа. Проте погрішність відходу залежить не тільки від положення коливань, але також від навколишньої температури і від ступеня зносу гіроскопа. Таким чином, на практиці можливість внесення поправок є вельми обмеженою. Завданням винаходу є визначення швидкості обертання осесиметричного вібруючого датчика і зведення до мінімуму погрішності відходу. Щоб виконати це завдання, відповідно до винаходу, пропонується спосіб визначення швидкості обертання осесиметричного вібруючого датчика, який містить коливальний елемент, пов'язаний з електродами керування і детекторними електродами, для створення коливань, спотворення яких має періодичність порядку n і положення яких міняється залежно від обертання датчика. Спосіб містить наступні етапи: - проводять оцінку швидкості обертання послідовно для числа N положень коливань по відношенню до електродів, при цьому положення геометрично зміщують на заздалегідь визначений кут і коливання переміщають від одного положення до іншого шляхом подачі команди прецесії з використанням заздалегідь встановленого масштабного множника; - визначають середнє значення з оцінок швидкості обертання в N положеннях, при цьому число N положень і кут, що розділяє положення, визначають так, щоб середнє значення оцінок дозволяло усунути, принаймні, одну з гармонік відходу коливань. Витікаюча з гармонік погрішність пов'язана з їх амплітудою, а фаза гармонік залежить від положення коливань. Таким чином, шляхом усереднювання оцінки швидкості для декількох положень можна усунути вплив гармонік, використовуючи положення, при яких сума амплітуд буде нульовою з урахуванням фази гармонік в цих положеннях, наприклад, в положеннях, в яких гармоніки мають однакову амплітуду по абсолютній величині, але зміщені по фазі на 180°. Таким чином, погрішність відходу зводиться до мінімуму при будь-якій температурі і при будьякому ступені зносу датчика. Переважно оцінку швидкості проводять для N положень коливань, при цьому кутові зсуви між положеннями пов'язані з числом N положень і з порядком n спотворення моди коливань наступним співвідношенням: кутовий зсув між положеннями дорівнює 2 /Νn. Таким чином, кутовий зсув між двома послідовними положеннями з N положень складає: 1 UA 99145 C2 5 10 15 20 25 30 35 40 45 50 55 - /n при N=2 - 2 /3n при N=3 - /2n при N=4 - і так далі Відповідно до одного з варіантів виконання, оцінку швидкості проводять для двох положень коливань, а саме, для першого положення і для другого положення, зміщеного на кут /n відносно першого положення. Таким чином, усувають вплив гармоніки порядку n. Для двох положень коливань, зміщених на /n, гармоніка порядку n має амплітуду однакового значення по абсолютній величині, але з протилежними знаками, тому при усереднюванні оцінок для двох положень, геометрично зміщених на /n, модальний зсув дорівнює , і тому амплітуди погрішності, витікаючої з гармоніки порядку n, взаємно знищуються. Відповідно до переважної ознаки цього варіанту виконання винаходу, оцінку швидкості здійснюють для двох додаткових положень коливань, а саме для положень, геометрично зміщених на /2n і на 3 /2n відносно першого положення. Таким чином, усувають не тільки вплив гармоніки, зокрема, порядку n, але також вплив гармоніки порядку 2n. Дійсно, між положенням, геометрично зміщеним на /2n, і положенням, геометрично зміщеним на 3 /2n, модальний зсув дорівнює , тому гармоніка порядку n виявляється усуненою так само, як і у попередньому випадку. Крім того, для первинного положення і положення, геометрично зміщеного на /n, гармоніка порядку 2n викликає погрішність відходу однакової амплітуди і одного і того ж знаку, а для положень, геометрично зміщених на /2n і на 3 /2n, гармоніка порядку 2n викликає погрішність відходу однакової амплітуди та зі знаком, протилежним знаку погрішності відходу в первинному положенні. Таким чином, визначивши середнє значення для чотирьох оцінок, усувається погрішність, витікаюча з гармоніки порядку 2n. Відповідно до другого варіанта виконання, оцінку швидкості проводять для трьох положень коливань, а саме, для першого положення, другого положення, зміщеного на кут 2 /3n відносно першого положення, і для третього положення, зміщеного на 4 /3n відносно першого положення. Використання трьох положень дозволяє на основі того ж принципу, що і у попередньому випадку, усунути, зокрема, гармоніки порядку n і 2n. Завдяки винаходу, залишкова погрішність відходу є незначною і пов'язана з постійною складовою, а також з гармоніками вищого порядку, що мають відносно невелику амплітуду. В цьому випадку дану погрішність можна компенсувати під час первинного калібрування пристрою, і на спотворення вимірювання швидкості обертання пристрою впливатимуть тільки зміни, що є відразу малими і компенсованими. Оскільки погрішності унаслідок нелінійності, що викликаються електронними кодуючими пристроями, використовуваними для вимірювання кутового положення коливань, є максимальними для нульових вхідних значень, можна вибрати кути для вимірювання швидкості обертання, уникаючи нульових значень на виході детекторних електродів (вхідні сигнали кутових кодуючих пристроїв). Як правило, усереднювання по N положенням дозволяє усунути всі гармоніки, окрім гармонік порядку 2kN, де k є будь-яким цілим числом. У окремому випадку півсферичного вібруючого гіроскопа, використовуваного із спотворенням другого порядку, тобто n=2: - вибір двох кутових положень 0 і 2=0 + 90° дозволяє усунути гармоніки порядка 2, 6, 10, 14, 18, 20; - вибір трьох кутових положень 0, 4=0 + 60° та 5=0 + 120° дозволяє усунути гармоніки порядка 2, 4, 8, 10, 14, 16, 20; - вибір чотирьох кутових положень 0, 1=0 + 45°, 2=0 + 90° і 3=0+135° дозволяє усунути гармоніки порядка 2, 4, 6, 10, 12, 14, 18, 20. Слід зазначити, що вибір трьох положень є найбільш переважним, оскільки при невеликому числі положень він дозволяє усунути гармоніки 2 і 4, які є такими, що превалюють при «альтернативному» відході, і більшу кількість гармонік другорядного значення. Слід також відзначити, що описаний винахід принципово зв'язує відхилення вимірювання швидкості обертання між двома різними положеннями коливань з гармонійним відходом резонатора, отже, необхідно, щоб швидкість обертання, що надається датчику, була постійною протягом всіх вимірювань, без чого не можна добитися усунення гармонійних складових відходу. По суті, реальною умовою є знання відхилення швидкості обертання між періодами 2 UA 99145 C2 5 10 15 20 25 30 35 40 45 50 55 часу, відповідними вимірюванням, при цьому постійна швидкість є тільки окремим випадком, коли це відхилення дорівнює нулю. Об'єктом даного винаходу є також інерційний пристрій для здійснення способу відповідно до цього винаходу. Цей інерційний пристрій містить осесиметричний вібруючий датчик, що містить коливальний елемент, пов'язаний з електродами керування і детекторними електродами, засоби для збудження датчика з метою створення коливань, засоби для оцінки швидкості обертання датчика для кожного з N положень коливань відносно електродів, засоби для керування прецесією з використанням заздалегідь встановленого масштабного коефіцієнта і засобу для визначення середнього значення з оцінок швидкості обертання датчика в N положеннях коливань. Інші ознаки і переваги цього винаходу будуть очевидніші з нижченаведеного опису окремого і не обмежувального варіанту виконання винаходу з посиланнями на креслення, що додаються, на яких: Фіг. 1 - схематичний вигляд в осьовому розрізі по лінії І-І Фіг. 2 вібруючого датчика з півсферичним ковпачком; Фіг. 2 - вигляд в розрізі по лінії ІІ-ІІ Фіг. 1; Фіг. 3 - блок-схема прикладу здійснення способу відповідно до цього винаходу в різних варіантах застосування; Фіг. 4 - схема, що ілюструє амплітуду гармоніки другого порядку і гармоніки четвертого порядку залежно від положення коливань відносно контрольного електроду; Фіг. 5 - схематичний вид земної кулі і вібруючого датчика із застосуванням винаходу для визначення Півночі. На Фіг. 1 і 2 показаний інерційний пристрій відповідно до даного винаходу з вібруючим датчиком, що має спотворення другого порядку. Пристрій містить вібруючий датчик 7 з півсферичним ковпаком, що містить, як відомо, ковпак 1 з кварцу, встановлений на основі 2 теж з кварцу, при цьому ковпак 1 оточений герметичним корпусом 3, що дозволяє створювати навколо датчика вакуум. Як відомо, на внутрішню поверхню ковпака 1 наносять металеве покриття, так само як і на його нижній край, який знаходиться напроти двох пар електродів 4 керування і двох пар детекторних електродів 5, сполучених відповідним чином з блоком 6 керувань і детектування, для створення коливань 11, які показані на Фіг. 2 пунктирною лінією і положення яких позначене кутом по відношенню до контрольного електроду 5. Положенням коливань 11 управляє блок 6 керувань шляхом подачі команди прецесії на електроди 4 керування, Як показано на Фіг. 3, переважний варіант здійснення способу відповідно до даного винаходу містить перший етап 8 позиціонувань коливань а першому положенні 0. Для першого положення 0 коливань спосіб містить етап 9 оцінок швидкості обертання датчика. Цю оцінку швидкості обертання, як відомо, проводять, використовуючи гіроскоп в режимі гіроскопа або в режимі гірометра. У разі режиму гіроскопа проводять ряд вимірювань положення коливань за короткий час, протягом якого переміщення коливань є незначним у порівнянні з періодом гармонік другого порядку і четвертого порядку. Зокрема, у варіанті застосування способу для визначення Півночі гіроскоп переважно залишається нерухомим по відношенню до земної поверхні, щоб максимальна швидкість обертання гіроскопа відповідала швидкості обертання Землі, тобто швидкості обертання 15°/год. Таким чином, при вимірюванні швидкості обертання датчика, яке роблять в режимі гіроскопа протягом десяти секунд, зміною положення коливань можна знехтувати. Щоб уникнути будь-якої зміни положення коливань і уникнути погрішностей, пов'язаних з помилками кодування положення коливань, для невеликих швидкостей обертання переважно оцінку проводять в режимі гірометра, хоча масштабний коефіцієнт в цьому випадку є менш точним, чим в режимі гіроскопа. Після цього переходять до етапу зміни 10 положень коливань шляхом подачі команди прецесії на електроди 4 керування, потім до оцінки 13 швидкостей обертання датчика в зміненому положенні. У першому переважному варіанті здійснення коливання порушують в трьох положеннях 14 1, 2 і 3, відповідно зміщених геометрично від первинного положення , при кутах i=0+i /2n, де і є цілим числом від 1 до 3, тобто для n=2 зсувів на 45°, 90° та 135°. Після цього обчислюють середнє значення 15 з різних оцінок швидкості обертання датчика. Як показано на Фіг. 4, амплітуда А22 гармоніки порядка 2 для положення 2, зміщеного на 90° по відношенню до первинного положення 0, рівна за абсолютною величиною з протилежним знаком амплітуді A20 гармоніки порядка 2 в положенні 0. 3 UA 99145 C2 5 10 15 20 25 30 35 40 45 50 55 Так само, амплітуда А23 гармоніки другого порядку для положення 4 коливань має таке ж значення, але знак, протилежний амплітуді А21 гармоніки другого порядку для положення 1. Таким чином, під час усереднювання погрішності відходу, пов'язані з гармонікою 2, взаємно знищуються парами. Що стосується гармоніки четвертого порядку, то амплітуди А41 і А43 для положень з кутами 1 і 3 мають однакове значення, але знак, протилежний амплітудам А40 і А42, для положень коливань з кутами 0 і 2. Під час визначення середнього значення ці чотири значення взаємно компенсуються. У другому переважному варіанті здійснення коливання збуджують в двох змінених положення 4 , 5 , відповідно зміщених геометрично від первинного положення 0, при цьому 4 = 0 + /3 та 5 = 0 + 2 /3, тобто із зсувом на 60° і на 120°. Як і у попередньому випадку, проводять оцінку швидкості обертання датчика для кожного з положень 0, 4, 5, після чого здійснюють усереднювання різних оцінок швидкості обертання датчика. Як показано на Фіг. 4, гармоніка другого порядку в положеннях 4, 5 має протилежний знак по відношенню до положення 0, і сума амплітуд А24 і А25 гармоніки другого порядку для положень 4 і 5 рівна за абсолютною величиною амплітуді А20 гармоніки другого порядку в положенні 0. Отже, сума амплітуд А20, А24, А25 рівна нулю, Так само, гармоніка четвертого порядку в положеннях 4, 5 має протилежний знак по відношенню до положення 0, і сума амплітуд А44 і А45 гармоніки четвертого порядку для положень 4 і 5 рівна за абсолютною величиною амплітуді А40 гармоніки четвертого порядку в положенні 0. Отже, сума амплітуд А40, А44, А45 дорівнює нулю. Під час усереднювання погрішності відходу, пов'язані з гармоніками другого і четвертого порядку, взаємно знищуються. По суті справи, в цих двох варіантах виконання гармоніки вищого порядку знищуються так само, як і гармоніки другого і четвертого порядку. Таким чином: - вибір двох кутових положень 0 і 2=0 + 90° дозволяє усунути гармоніки порядка 2, 6, 10, 14, 18, 20; - вибір трьох кутових положень 0, 4=0 + 60° і 5=0 + 120° дозволяє усунути гармоніки порядка 2, 4, 8, 10, 14, 16, 20; - вибір чотирьох кутових положень 0, 1=0 + 45°, 2=0 + 90° і 3=0+135° дозволяє усунути гармоніки порядка 2, 4, 6, 10, 12, 14, 18, 20. У обох варіантах виконання первинне положення можна вибирати з урахуванням зміщених положень, щоб кожне з положень відповідного сигналу виявлення мало не рівне нулю значення, з міркувань забезпечення якості перетворення аналогового сигналу, що видається детекторними електродами 5, в цифровий сигнал. Наприклад, при динаміці прецесії в 5°/c необхідно відлічити приблизно десять секунд для зміни положення коливань на 45°. Крім того, необхідно відлічити близько п'ятнадцяти секунд, щоб провести оцінку швидкості обертання для даного положення. У разі оцінки в чотирьох положеннях слід, таким чином, рахувати повний час оцінки порядка сто секунд. Цей час можна скоротити за рахунок невеликої втрати точності, проводячи оцінку тільки для двох положень, при цьому перша оцінка відповідає першому положенню 0, а друга оцінка відповідає другому положенню 2, зміщеному на 90° відносно першого положення. В цьому випадку погрішність, витікаюча з гармоніки другого порядку, усувається, тоді як погрішність, пов'язана з гармонікою четвертого порядку, зберігається. Разом з тим, в зв'язку з цим слід зазначити, що на відміну від картини, показаної на Фіг, 4, де гармоніка четвертого порядку свідомо перебільшена для кращого розуміння, насправді гармоніка четвертого порядку має набагато меншу амплітуду, ніж гармоніка другого порядку. Для півсферичного резонансного гіроскопа гармоніка другого порядку може привести до появи відходу приблизно в один градус в годину, тоді як гармоніка четвертого порядку може викликати відхід приблизно в одну десяту градуса в годину. В зв'язку з цим слід зазначити, що гармоніки другого порядку і четвертого порядку компенсують одна одну тільки за умови, якщо швидкість обертання гіроскопа залишається постійною протягом всього часу вимірювань, призначених для оцінки швидкості обертання. Якщо навіть швидкість обертання не є постійною, все одно винахід залишається в силі. В цьому випадку досить мати в своєму розпорядженні засоби для здійснення вимірювання 18 змін швидкості обертання і для виконання дедукції алгебри виходячи з таких змін швидкості обертання, яка оцінюється в кожному положенні. Ці етапи здійснюють, наприклад, за допомогою віддаленого гіроскопа 13, сполученого з блоком 6 керувань і детектування паралельно з вібруючим датчиком 7. Віддалений гіроскоп 19 має погану точність для абсолютного 4 UA 99145 C2 5 10 15 20 25 30 35 40 45 50 55 60 вимірювання швидкості, але хорошу точність для вимірювання відхилень, що відбуваються за дуже короткий час. Переважно віддалений гіроскоп 19 застосовують із здійсненням інтеграції виміряних змін по тих же періодах часу, що і при інтеграції швидкості обертання, виміряної вібруючим датчиком. Середнє значення, що є кінцевою оцінкою швидкості обертання, в цьому випадку отримують дуже просто шляхом складання інтегралів і ділення на загальний час, протягом якого проводилися вимірювання швидкості обертання. Спосіб відповідно до даного винаходу дозволяє, зокрема, поліпшити варіанти застосування, в яких використовується оцінка постійної швидкості обертання, зокрема, визначення Півночі або вирівнювання відносно контрольного елементу. На Фіг. 3 і 5 показаний варіант застосування визначення Півночі, коли інерційний пристрій, що містить вібруючий датчик 1, є нерухомим по відношенню до земної кулі 16. З урахуванням обертання Землі навколо осі Північ-Південь вібруючий датчик 1, вісь симетрії якого розташована паралельно дотичній до паралелі 17, що проходить через датчик, тобто в напрямі Схід-Захід, не піддається ніякому обертанню. Починаючи з напряму, при якому датчику надається швидкість обертання, не рівна нулю, спосіб для такого варіанту застосування містить, як відомо, етап порівняння 20 швидкостей обертання датчика зі швидкістю обертання контрольного елементу, тобто зі швидкістю обертання земної кулі у разі носія, що знаходиться на землі, і етап 21 визначення напряму датчика шляхом застосування тригонометричних формул, що дають складову обертання вібруючого датчика залежно від його напряму. Точність оцінки швидкості обертання, що досягається за допомогою заявленого способу, дозволяє здійснювати цей варіант застосування з підвищеною точністю для визначення Півночі. Щоб отримати вищу точність визначення Півночі, переважно вісь симетрії гіроскопа розташовують приблизно уздовж напряму Схід-Захід. У разі вирівнювання інерційного пристрою перед польотом переважний інерційний пристрій містить три вібруючі датчики, осі яких розташовані в ортогональних напрямах. Відповідно до ще однієї ознаки даного винаходу, зміна положення коливань для оцінки швидкості обертання дозволяє здійснити порівняння 22 між командою прецесії і зміною положення коливань і провести обчислення 23 оновленого масштабного коефіцієнта, який можна відразу використовувати для оцінки швидкості вібруючого датчика. Переважно різні етапи способу відповідно до даного винаходу здійснюють за допомогою прикладних програм, встановлених в блоці 6 керувань, який разом з вібруючим датчиком утворює інерційний пристрій. Зрозуміло, винахід не обмежується описаними варіантами виконання і може включати варіанти реалізації, які може здійснити фахівець, не виходячи за рамки винаходу, визначені формулою винаходу. Зокрема, не дивлячись на те, що варіанти застосування були описані для вібруючого датчика, нерухомого по відношенню до землі, спосіб відповідно до даного винаходу можна також застосовувати, коли інерційний пристрій встановлений в носієві, рухомому відносно землі. Хоча винахід був описаний у зв'язку з гіроскопом другого порядку, його можна також застосовувати для гіроскопа вищого порядку. В цьому випадку кутові відхилення між положеннями, які залежать від числа положень і від порядку n модального спотворення коливань, матимуть значення 2 /Νn, тобто: - /n для N=2 - 2 /3n для N=3 - /2n для N=4 - і так далі. ФОРМУЛА ВИНАХОДУ 1. Спосіб визначення швидкості обертання осесиметричного вібруючого датчика (7), що містить коливальний елемент (1), пов'язаний з електродами (4) керування і детекторними електродами (5), для створення коливань, спотворення яких має періодичність порядку n і положення (Θ) яких змінюється залежно від обертання датчика, який відрізняється тим, що містить наступні етапи: проводять оцінку швидкості обертання послідовно для числа N положень коливань по відношенню до електродів, при цьому положення геометрично зміщують на заздалегідь визначений кут і коливання зміщують від одного положення до іншого шляхом подачі команди прецесії з використанням заздалегідь встановленого масштабного коефіцієнта; 5 UA 99145 C2 5 10 15 20 25 30 35 40 45 50 55 визначають середнє значення з оцінок швидкості обертання в N положеннях; при цьому число N положень і кут, що розділяє положення, визначають так, щоб середнє значення вказаних оцінок дозволяло усунути принаймні одну складову гармонійного відходу коливань. 2. Спосіб за п. 1, який відрізняється тим, що оцінку швидкості проводять для N положень коливань, при цьому кутові зсуви між положеннями пов'язані з числом N положень і з порядком n модального спотворення коливань співвідношенням: кутовий зсув між положеннями дорівнює 2π/Nn. 3. Спосіб за п. 1, який відрізняється тим, що оцінку швидкості проводять для двох положень коливань, а саме, для першого положення (Θ0) і для другого положення, зміщеного на кут π/n відносно першого положення. 4. Спосіб за п. 2, який відрізняється тим, що оцінку швидкості здійснюють для двох додаткових положень коливань, а саме, для положень, геометрично зміщених на π/2n і на 3π/2n відносно першого положення. 5. Спосіб за п. 1, який відрізняється тим, що оцінку швидкості проводять для трьох положень коливань, а саме, для першого положення (Θ0), другого положення, зміщеного на кут 2π/3n відносно першого положення, і для третього положення, зміщеного на 4π/3n відносно першого положення. 6. Спосіб за всіма або за частиною попередніх пунктів, який відрізняється тим, що містить попередній етап подачі команди на збудження коливань в кутових положеннях, які вибирають так, щоб відповідний сигнал, що детектується, мав значення не рівне нулю. 7. Спосіб за всіма або за частиною попередніх пунктів, який відрізняється тим, що містить наступні етапи: здійснюють порівняння (22) між командою прецесії і відповідною зміною дійсного кута, і на його підставі виводять оновлене значення (23) масштабного коефіцієнта. 8. Спосіб за всіма або за частиною попередніх пунктів, який відрізняється тим, що містить наступні етапи: вимірюють (18) зміни швидкості обертання датчика, і здійснюють алгебраїчну дедукцію, виходячи із виміряних змін при усереднюванні оцінок швидкості обертання. 9. Інерційний пристрій, який містить осесиметричний вібруючий датчик (7), що включає коливальний елемент (1), пов'язаний з електродами (4) керування і детекторними електродами (5), засоби (б) збудження датчика для генерування коливань, який відрізняється тим, що містить засоби для оцінки (9) швидкості обертання датчика для кожного з N положень коливань відносно електродів, засоби для керування прецесією (10) з використанням заздалегідь встановленого масштабного коефіцієнта, поки коливання не дійдуть до кожного з N положень, і засоби для визначення середнього значення (15) з оцінок швидкості обертання датчика в N положеннях коливань. 10. Пристрій за п. 9, який відрізняється тим, що оцінку швидкості проводять для N положень коливань, при цьому кутові зсуви між положеннями пов'язані з числом N положень і з порядком n модального спотворення коливань співвідношенням: кутовий зсув між положеннями дорівнює 2π/Nn. 11. Пристрій за п. 10, який відрізняється тим, що оцінку проводять для двох положень коливань, а саме для першого положення (Θ0) і для другого положення, зміщеного на кут π/n відносно першого положення. 12. Пристрій за п. 11, який відрізняється тим, що оцінку швидкості здійснюють для двох додаткових положень коливань, геометрично зміщених на π/2n і на 3π/2n відносно першого положення. 13. Пристрій за п. 12, який відрізняється тим, що оцінку швидкості проводять для трьох положень коливань, а саме, для першого положення (Θ0), другого положення, зміщеного на кут 2π/3n відносно першого положення, і для третього положення, зміщеного на 4π/3n відносно першого положення. 14. Пристрій за п. 9, який відрізняється тим, що містить: засоби для порівняння (22) між кожною командою прецесії і відповідною зміною дійсного кута, і засоби для визначення оновленого значення (23) масштабного коефіцієнта. 15. Пристрій за п. 9, який відрізняється тим, що містить: засоби (19) для вимірювання змін швидкості обертання датчика, і засоби для виконання алгебраїчної дедукції, виходячи із виміряних змін під час усереднювання оцінок швидкості обертання. 6 UA 99145 C2 7 UA 99145 C2 Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 8
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and inertial device for determination of rotation speed of an axisymmetric vibrating sensor
Автори англійськоюCaron, Jean-Michel, Roberfroid, David
Назва патенту російськоюСпособ определения скорости вращения осесимметричного вибрирующего датчика и инерционное устройство для осуществления указанного способа
Автори російськоюКарон Жан-Мишель, Роберфруа Давид
МПК / Мітки
МПК: G01C 25/00, G01C 19/36, G01C 19/56
Мітки: вищезгаданого, здійснення, вібруючого, осесиметричного, пристрій, обертання, швидкості, способу, спосіб, інерційний, визначення, датчика
Код посилання
<a href="https://ua.patents.su/10-99145-sposib-viznachennya-shvidkosti-obertannya-osesimetrichnogo-vibruyuchogo-datchika-ta-inercijjnijj-pristrijj-dlya-zdijjsnennya-vishhezgadanogo-sposobu.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення швидкості обертання осесиметричного вібруючого датчика та інерційний пристрій для здійснення вищезгаданого способу</a>
Спосіб збільшення швидкості обертання та стабілізації обертання ротора двигуна та пристрій для його здійснення
Номер патенту: 24268
Опубліковано: 07.07.1998
Автори: Надєін Владислав Семенович, Ткач Анатолій Анатолійович
Мітки: здійснення, збільшення, пристрій, швидкості, спосіб, обертання, двигуна, стабілізації, ротора
Формула / Реферат:
1. Способ увеличения скорости вращения и стабилизации вращения ротора двигателя, при котором текущую среду направляют на прижатые к упорам в просвете рамочного маха вращающиеся части составной лопасти, внешнюю и внутреннюю, циклическим воздействием этих частей на упоры рамочного маха с одновременным переводом вращающихся частей других составных лопастей во флюгерное положение, вращают ротор, отличающийся тем, что увеличение мощности и КПД...
Застосування способу визначення швидкості відлущування рогового шару епідермісу як способу визначення ефективності лікування при дерматозах

Номер патенту: 40351
Опубліковано: 10.04.2009
Автор: Маврода Добринка Іванівна
МПК: A61B 10/00
Мітки: застосування, лікування, шару, визначення, відлущування, ефективності, рогового, способу, швидкості, епідермісу, дерматозах
Формула / Реферат:
Застосування способу визначення швидкості відлущування рогового шару епідермісу як способу визначення ефективності лікування при дерматозах.
Спосіб визначення структури магнітного поля фокусуючої системи іонної оптики і пристрій для здійснення цього способу
Номер патенту: 89209
Опубліковано: 11.01.2010
Автори: Колінько Сергій Володимирович, Сайко Микола Олександрович, Пономарьов Олександр Георгийович, Ребров Володимир Анатолійович
МПК: G01R 33/02, G01R 33/06
Мітки: фокусуючої, цього, здійснення, визначення, пристрій, системі, іонної, оптики, способу, спосіб, структури, магнітного, поля
Формула / Реферат:
1. Спосіб визначення структури магнітного поля фокусуючої системи іонної оптики, що включає сканування магнітного поля шляхом визначення магнітної індукції у робочому зазорі фокусуючої системи вздовж її осі з наступним обчислюванням мультипольних компонент, який відрізняється тим, що при скануванні визначають тільки радіальну складову вектора магнітної індукції у дискретних точках, далі по цих точках обчислюють положення фізичної осі...
Спосіб визначення залежності швидкості розповсюдження акустичних коливань від їх інтенсивності і пристрій для його здійснення
Номер патенту: 34594
Опубліковано: 15.03.2001
Автори: Лісовець Сергій Миколайович, Скрипник Юрій Олексійович
МПК: G01N 29/00, G01H 5/00, G01N 29/07
Мітки: залежності, здійснення, визначення, спосіб, коливань, акустичних, інтенсивності, швидкості, пристрій, розповсюдження
Формула / Реферат:
1. Спосіб визначення залежності швидкості розповсюдження акустичних коливань від їх інтенсивності, який полягає в тому, що генерують електричні коливання, формують з них пакети електричних зондуючих коливань, які перетворюють в пакети акустичних зондуючих коливань. що випромінюють в досліджуване середовище, приймають пакети акустичних зондуючих коливань, що пройшли середовище, та перетворюють їх в пакети прийнятих електричних зондуючих...
Спосіб визначення швидкості розповсюдження акустичних коливань і пристрій для його здійснення
Номер патенту: 34508
Опубліковано: 15.03.2001
Автори: Скрипник Юрій Олексійович, Здоренко Валерій Георгійович, Іващенко Григорій Олексійович
МПК: G01N 29/00, G01H 5/00, G01N 29/07
Мітки: визначення, швидкості, здійснення, спосіб, розповсюдження, коливань, акустичних, пристрій
Текст:
...підключений до входу фільтру нижніх частот і входу фільтру верхніх частот, вихід першого інтегратора з'єднаний з керувальним входом генератора високої частоти, а вихід другого інтегратора з'єднаний з керувальним входом двофазного генератора низької частоти, один з виходів якого з'єднаний з одним входом цифрового частотоміра, інший вхід якого з'єднаний з виходом генератора високої частоти, а керувальні входи чотирьох автоматичних...