Спосіб визначення структури магнітного поля фокусуючої системи іонної оптики і пристрій для здійснення цього способу
Номер патенту: 89209
Опубліковано: 11.01.2010
Автори: Пономарьов Олександр Георгийович, Колінько Сергій Володимирович, Сайко Микола Олександрович, Ребров Володимир Анатолійович
Формула / Реферат
1. Спосіб визначення структури магнітного поля фокусуючої системи іонної оптики, що включає сканування магнітного поля шляхом визначення магнітної індукції у робочому зазорі фокусуючої системи вздовж її осі з наступним обчислюванням мультипольних компонент, який відрізняється тим, що при скануванні визначають тільки радіальну складову вектора магнітної індукції у дискретних точках, далі по цих точках обчислюють положення фізичної осі фокусуючої системи, а мультипольні компоненти визначають відносно цієї осі.
2. Пристрій для визначення структури магнітного поля фокусуючої системи іонної оптики, який включає жорстку раму, встановлену з можливістю поздовжнього переміщення з розміщеним на ній вимірювальним перетворювачем, закріпленим на жорсткій штанзі з можливістю обертання сумісно з нею навколо її осі, який відрізняється тим, що вимірювальний перетворювач виконаний у вигляді датчика Холла і додатково він має механізм позиціювання з кроковим двигуном.
Текст
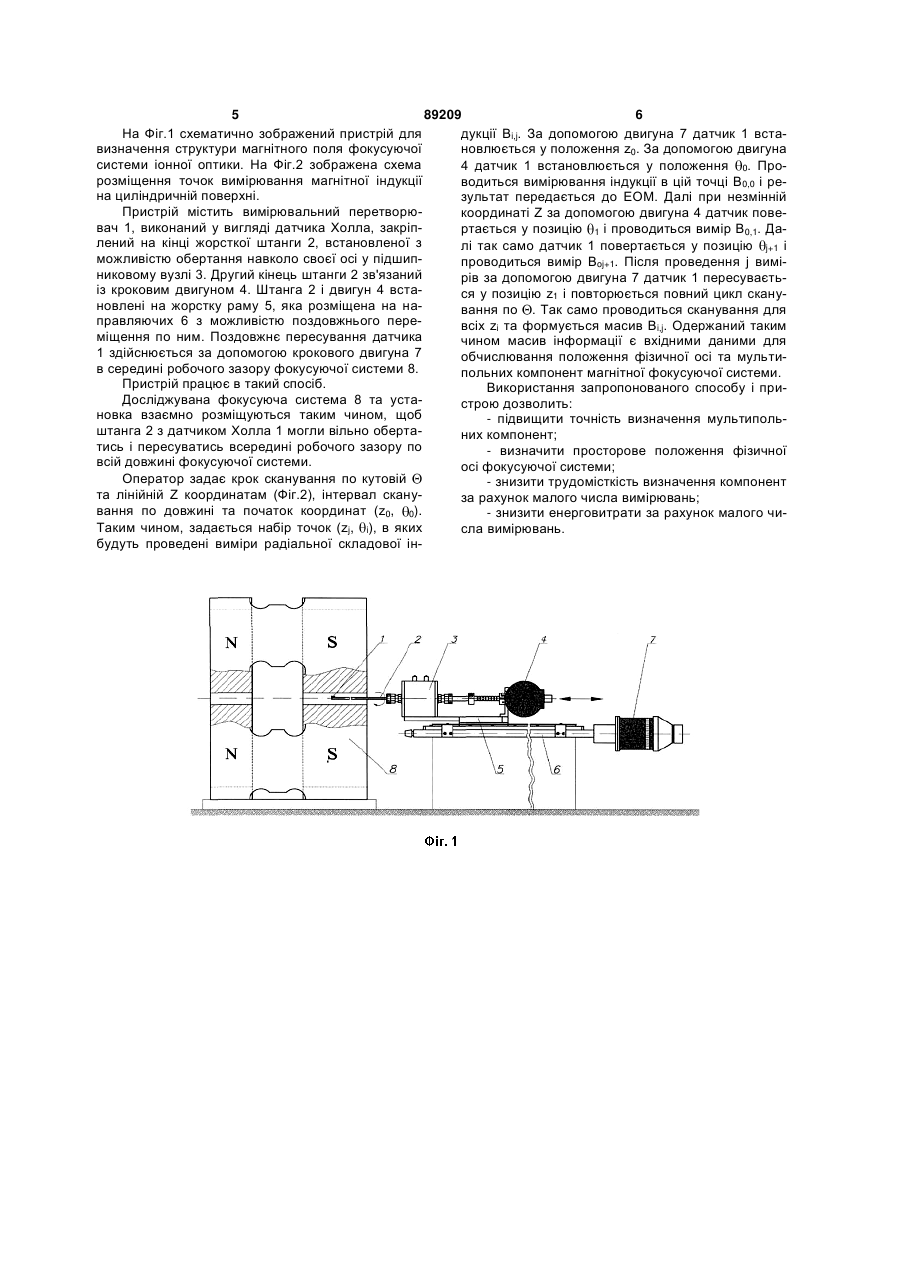
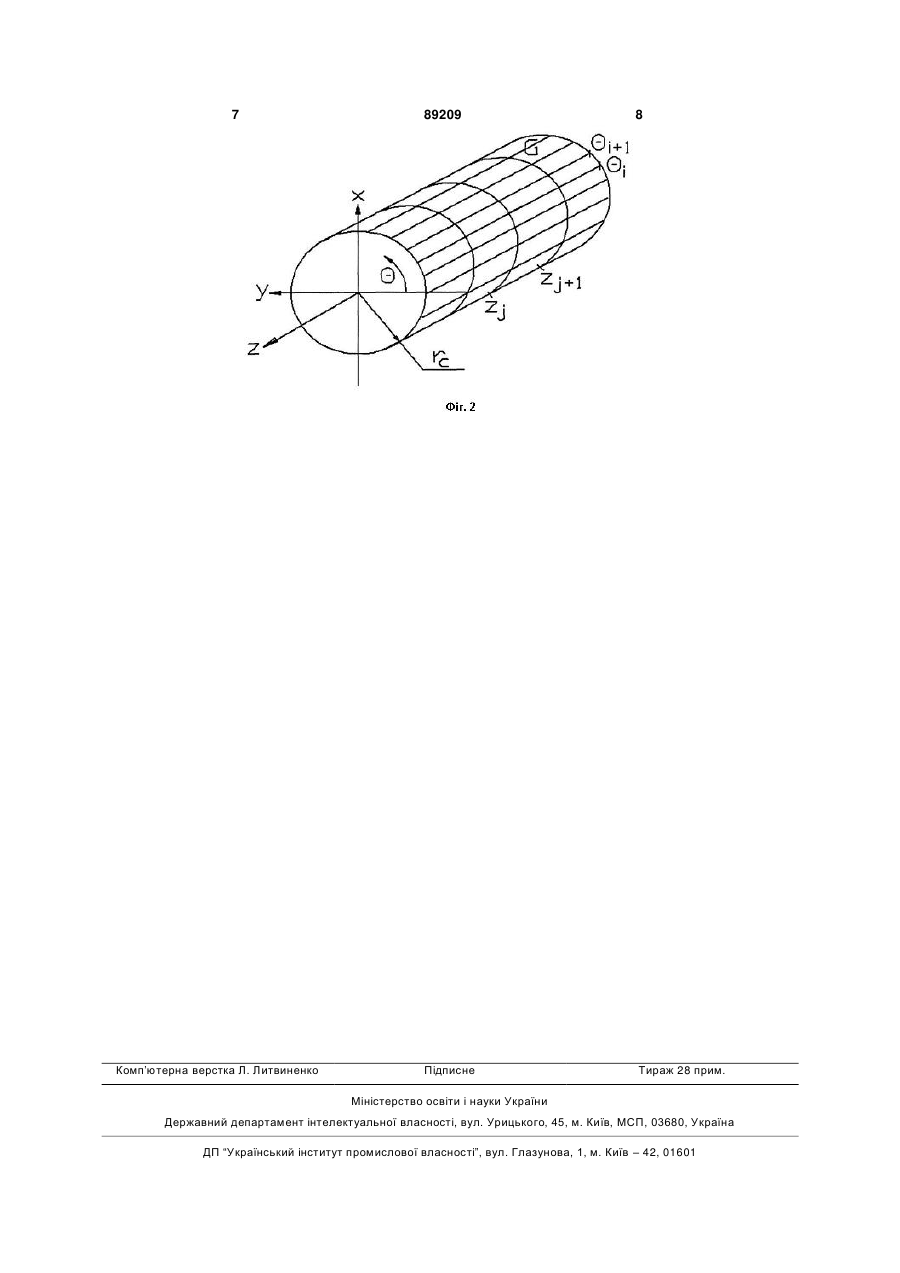
1. Спосіб визначення структури магнітного поля фокусуючої системи іонної оптики, що включає сканування магнітного поля шляхом визначення магнітної індукції у робочому зазорі фокусуючої системи вздовж її осі з наступним обчислюванням мультипольних компонент, який відрізняється тим, що при скануванні визначають тільки радіальну складову вектора магнітної індукції у дискретних точках, далі по цих точках обчислюють положення фізичної осі фокусуючої системи, а мультипольні компоненти визначають відносно цієї осі. 2. Пристрій для визначення структури магнітного поля фокусуючої системи іонної оптики, який включає жорстку раму, встановлену з можливістю поздовжнього переміщення з розміщеним на ній вимірювальним перетворювачем, закріпленим на жорсткій штанзі з можливістю обертання сумісно з нею навколо її осі, який відрізняється тим, що вимірювальний перетворювач виконаний у вигляді датчика Холла і додатково він має механізм позиціювання з кроковим двигуном. UA (21) a200707626 (22) 06.07.2007 (24) 11.01.2010 (46) 11.01.2010, Бюл.№ 1, 2010 р. (72) ПОНОМАРЬОВ ОЛЕКСАНДР ГЕОРГІЙОВИЧ, КОЛІНЬКО СЕРГІЙ ВОЛОДИМИРОВИЧ, РЕБРОВ ВОЛОДИМИР АНАТОЛІЙОВИЧ, САЙКО МИКОЛА ОЛЕКСАНДРОВИЧ (73) ІНСТИТУТ ПРИКЛАДНОЇ ФІЗИКИ НАН УКРАЇНИ (56) G. Datzman, G. Dollinger, G. Hinderer, H.J. Korner A superconducting multipole lens for focusing high energy ions, Nucl. Instr. and Meth. in Physics Res., B 158 (1999), 74-80 UA 52637 C2; 15.01.2003 SU 960679; 23.09.1982 SU 458790; 30.01.1975 SU 1684761 A1; 15.10.1991 SU 1709259 A1; 30.01.1992 Fan T.C., Lin F.Y. Huang M.H., Chang C.H., Hwang C.S. Magnetic field measurement on superconducting multipole wiggler with narrow duct, Proceedings of the 2003 Particle Accelerator Conference C2 2 (19) 1 3 89209 4 Однак, недоліком цього способу і пристрою є невколо її осі, згідно винаходу, вимірювальний передостатньо висока точність визначення мультипотворювач виконаний у вигляді датчика Холла і льних компонент через суттєві погрішності зняття додатково він має механізм позиціювання з крокоінформації при скануванні магнітного поля фокувим двигуном. суючої системи, а також неможливість визначення Саме визначення при скануванні тільки радіапросторового положення фізичної осі, що призвольної складової вектору магнітної індукції у дисдить до значних помилок при обчислюванні мулькретних точках робочого зазору фокусуючої систипольних компонент. теми дозволяє, використавши обмежену кількість В основу винаходу поставлене завдання ствовимірів і визначивши розподіл магнітного потенцірення ефективного способу і пристрою визначення алу на поверхні, що обмежує деякий простір, виструктури магнітного поля фокусуючої системи значити індукцію поля у будь-якій точці, що налеіонної оптики в якому, шляхом визначення фізичжить цьому простору. ної осі фокусуючої системи, забезпечується можВикористання сукупності всіх істотних ознак ливість одержання інформації про структуру магнідозволить визначити просторове положення фізитного поля у всьому об'єму робочого зазору чної осі й обчислювання мультипольних компонент фокусуючої системи, що дозволяє обчислити мувиконати відносно неї, що суттєво вплине на точльтипольні компоненти більш точно. ність їх визначення. Поставлена мета досягається тим, що в споПриклад, що ілюструє використання винаходу. собі визначення структури магнітного поля фокуПроведене в автоматичному режимі дослісуючої системи іонної оптики, що включає сканудження структури поля магнітної фокусуючої сисвання магнітного поля шляхом визначення теми, виконаної у вигляді дублета магнітних квадмагнітної індукції в робочому зазорі фокусуючої рупольних лінз із такими основними технічними системи вздовж її осі з наступним обчислюванням характеристиками: зовнішній діаметр ярма 235мм, мультипольних компонент, згідно винаходу, при радіус апертури 6,5мм, довжини лінз 65мм та скануванні визначають тільки радіальну складову 44мм, відстань між лінзами 46мм. Котушки мають вектора магнітної індукції в дискретних точках, по 80 витків у вигляді мідних плоских пластин із далі по цих точках обчислюють положення фізичпоперечним перерізом 0,65 10,0мм2, максимальної осі фокусуючої системи, а мультипольні комний градієнт поля в області лінійної залежності поненти визначають відносно цієї осі. магнітної індукції від струму в котушках складає Поставлена мета досягається тим, що в при0,65Тл/см. строї для визначення структури магнітного поля Результати зібрані в таблиці, де фокусуючої системи іонної оптики, який включає Wn - мультипольні компоненти, жорстку раму, установлену з можливістю поздовжХ0, Y0 - координати фізичної осі, нього переміщення з розміщеним на ній вимірюва- кут повороту лінзи. льним перетворювачем, закріпленим на жорсткій штанзі з можливістю обертання сумісно з нею наТаблиця 1 Довга лінза, струм: -1,3 А [град] 37.027 Х0[ m] -52.9 Y0[ m] 186.1 W2, 1/см W3/W2, 1/см U3/W2, 1/см W4/W 2, 1/см2 U4/W 2, 1/см2 -0.4869 1.309Е-02 1.331Е-02 2.512Е-04 2.504Е-03 Таблиця 2 Коротка лінза, струм:- 1,3 А [град] 36.171 Х0[ m] Y0[( m] W 2, 1/см W3/W 2, 1/см U3/W 2, 1/см W4/W2, 1/см2 U4/W2, 1/см2 -33.6 165.9 -0.5182 1.180Е-02 1.288Е-02 -4.431Е-04 1.584Е-03 Датчик Холла закріплюють на відстані r с від осі штанги 2, отже, під час обертання штанги 2 активна область датчика 1 описує коло радіусом rс (Фіг.1, 2). За допомогою механізму поздовжнього переміщення датчик 1 пересувається вздовж осі обертання. Таким чином, датчик Холла прзиціонується по двом координатам (z, ) (поздовжньої і кутової) в циліндричній системі координат, як зображено на Фіг.2. При цьому всі точки, в яких проводиться ви мірювання, належать циліндричній поверхні G. Для зручності збирання та обробки даних, вимірювання проводиться у вузлах сітки (zj, j), де G - поверхня, до якої належать точки виміряної індукції; X, Y, Z - вісі координат; - кутова координата; rс - відстань від датчика до центра обертання; zj, i; Zj+1, і+1 - координати точок, де вимірюється індукція. 5 89209 6 На Фіг.1 схематично зображений пристрій для дукції Bi,j. За допомогою двигуна 7 датчик 1 вставизначення структури магнітного поля фокусуючої новлюється у положення z0. За допомогою двигуна системи іонної оптики. На Фіг.2 зображена схема 4 датчик 1 встановлюється у положення 0. Пророзміщення точок вимірювання магнітної індукції водиться вимірювання індукції в цій точці В0,0 і рена циліндричній поверхні. зультат передається до ЕОМ. Далі при незмінній Пристрій містить вимірювальний перетворюкоординаті Z за допомогою двигуна 4 датчик повевач 1, виконаний у вигляді датчика Холла, закріпртається у позицію 1 і проводиться вимір В0,1. Далений на кінці жорсткої штанги 2, встановленої з лі так само датчик 1 повертається у позицію j+1 і можливістю обертання навколо своєї осі у підшиппроводиться вимір Boj+1. Після проведення j виміниковому вузлі 3. Другий кінець штанги 2 зв'язаний рів за допомогою двигуна 7 датчик 1 пересуваєтьіз кроковим двигуном 4. Штанга 2 і двигун 4 встася у позицію z1 і повторюється повний цикл скануновлені на жорстку раму 5, яка розміщена на навання по . Так само проводиться сканування для правляючих 6 з можливістю поздовжнього перевсіх zi та формується масив Вi,j. Одержаний таким міщення по ним. Поздовжнє пересування датчика чином масив інформації є вхідними даними для 1 здійснюється за допомогою крокового двигуна 7 обчислювання положення фізичної осі та мультив середині робочого зазору фокусуючої системи 8. польних компонент магнітної фокусуючої системи. Пристрій працює в такий спосіб. Використання запропонованого способу і приДосліджувана фокусуюча система 8 та устастрою дозволить: новка взаємно розміщуються таким чином, щоб - підвищити точність визначення мультипольштанга 2 з датчиком Холла 1 могли вільно обертаних компонент; тись і пересуватись всередині робочого зазору по - визначити просторове положення фізичної всій довжині фокусуючої системи. осі фокусуючої системи; Оператор задає крок сканування по кутовій - знизити трудомісткість визначення компонент та лінійній Z координатам (Фіг.2), інтервал скануза рахунок малого числа вимірювань; вання по довжині та початок координат (z0, 0). - знизити енерговитрати за рахунок малого чиТаким чином, задається набір точок (zj, i), в яких сла вимірювань. будуть проведені виміри радіальної складової ін 7 Комп’ютерна верстка Л. Литвиненко 89209 8 Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of structure of magnetic field of focusing system of ion optics and device for realization of the method
Автори англійськоюPonomariov Oleksandr Heorhiiovych, Kolinko Serhii Volodymyrovych, Rebrov Volodymyr Anatoliiovych, Saiko Mykola Oleksandrovych
Назва патенту російськоюСпособ определения структуры магнитного поля фокусирующей системы ионной оптики и устройство для осуществления этого способа
Автори російськоюПономарёв Александр Георгиевич, Колинько Сергей Владимирович, Ребров Владимир Анатольевич, Сайко Николай Александрович
МПК / Мітки
МПК: G01R 33/06, G01R 33/02
Мітки: пристрій, магнітного, здійснення, спосіб, визначення, способу, оптики, системі, цього, структури, фокусуючої, іонної, поля
Код посилання
<a href="https://ua.patents.su/4-89209-sposib-viznachennya-strukturi-magnitnogo-polya-fokusuyucho-sistemi-ionno-optiki-i-pristrijj-dlya-zdijjsnennya-cogo-sposobu.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення структури магнітного поля фокусуючої системи іонної оптики і пристрій для здійснення цього способу</a>
Спосіб дослідження структури і елементного складу речовини і пристрій для здійснення цього способу (мікрозонд іонний)
Номер патенту: 67341
Опубліковано: 15.06.2004
Автори: Пономарьов Олександр Георгийович, Сторижко Володимир Юхимович, Мирошниченко Валентин Іванович
МПК: G01N 23/00
Мітки: складу, речовини, іонний, здійснення, спосіб, елементного, мікрозонд, пристрій, дослідження, цього, структури, способу
Формула / Реферат:
1. Спосіб дослідження структури й елементного складу речовини, що включає генерацію пучка іонів, його прискорення, вибір потрібного сорту іонів у пучку, формування фазового портрета пучка, фокусування і сканування, який відрізняється тим, що потрібний сорт іонів у пучку вибирають відразу після його генерації, потім формують фазовий портрет пучка, а після цього його прискорюють.2. Пристрій для дослідження структури і елементної сполуки...
Спосіб перевірки системи вприскування палива двигуна внутрішнього згоряння без демонтажу електромагнітних форсунок з цього двигуна та пристрій для здійснення цього способу
Номер патенту: 80002
Опубліковано: 10.08.2007
Автори: Кулик Арсеній Станіславович, Шевченко Володимир Іванович
МПК: F02M 65/00, F02M 57/00
Мітки: здійснення, палива, спосіб, двигуна, внутрішнього, демонтажу, перевірки, системі, форсунок, вприскування, цього, згоряння, способу, пристрій, електромагнітних
Формула / Реферат:
1. Спосіб перевірки системи вприскування палива двигуна внутрішнього згоряння без демонтажу електромагнітних форсунок з цього двигуна, в якому на електромагнітний клапан форсунки подають сигнал керування та за допомогою обчислювального блока визначають технічні характеристики системи, наприклад пропускну спроможність форсунки та баланс форсунок, який відрізняється тим, що до частини системи вприскування приєднують джерело стисненого або...
Пристрій для вимірювання напруженості магнітного поля

Номер патенту: 33373
Опубліковано: 25.06.2008
Автори: Коломієць Володимир Трохимович, Назаренко Наталія Іванівна
МПК: G01R 33/06
Мітки: напруженості, вимірювання, пристрій, магнітного, поля
Формула / Реферат:
Пристрій для вимірювання напруженості магнітного поля, що містить П-подібний магнітопровід з компенсаційною обмоткою, один вихід якої з'єднаний із входом реєструючого пристрою, під'єднаного до загальної шини, а інший - до диференційного підсилювача і підсилювача потужності, який відрізняється тим, що до магнітопроводу в області об'єкта контролю приєднана пластина з магнітом'якого матеріалу з прикріпленим датчиком Холла.
Спосіб визначення дії магнітного поля на водні системи
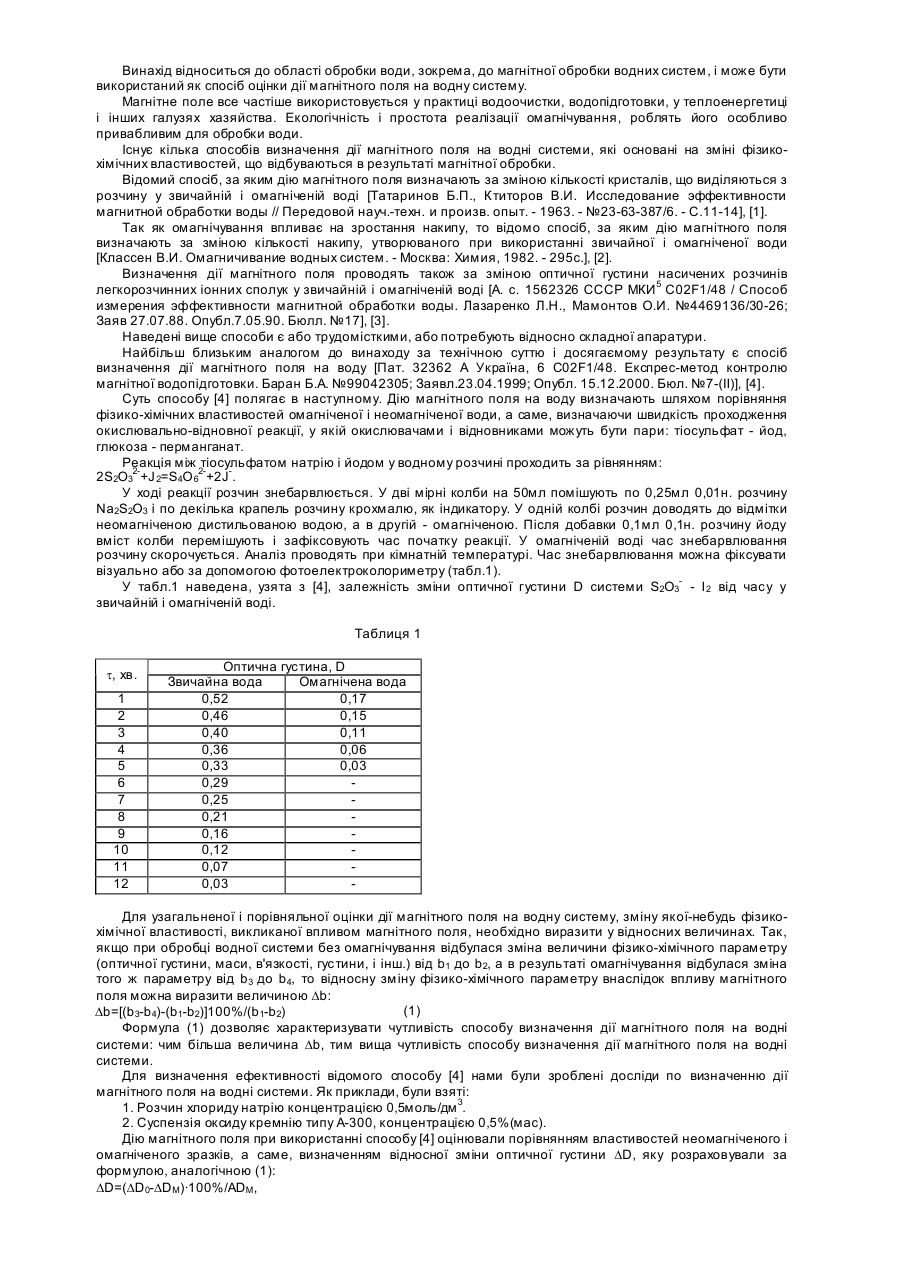
Номер патенту: 65070
Опубліковано: 15.06.2005
Автори: Гончарук Владислав Володимирович, Маляренко Валентин Володимирович
МПК: C02F 1/48
Мітки: дії, визначення, поля, водні, системі, магнітного, спосіб
Формула / Реферат:
Гідравлічний амортизатор містить циліндричний порожнистий корпус з днищем, розміщений у корпусі робочий циліндр, в якому установлений поршень зі штоком і перепускним клапаном, головку робочого циліндра, герметично закріплену в верхній частині корпусу амортизатора, яка має осьовий отвір, в якому герметично з можливістю осьового переміщення установлений шток поршня, днище робочого циліндра з перепускним клапаном, підвідний канал. Підвідний...
Спосіб визначення абонентів базових станцій і пристрій для здійснення цього способу
Номер патенту: 44285
Опубліковано: 15.02.2002
Автори: Падовані Роберто, Бар-Давід Гіл, Хамді Валід
Мітки: спосіб, пристрій, способу, абонентів, станцій, базових, здійснення, цього, визначення
Формула / Реферат:
1. Способ идентификации базовых станций, уровень принимаемого сигнала которых достаточен для установления связи с мобильной станцией, в сотовой системе связи, в которой мобильный пользователь через указанную мобильную станцию устанавливает связь с другими пользователями через по меньшей мере одну базовую станцию, включенную в активный список, содержащий в качестве записей одну или более базовых станций, и каждая из базовых станций, входящих,...
Попередній патент: Композиції, які виділяють ртуть, та пристрої на їх основі
Наступний патент: Гербіцидна композиція та способи боротьби з трав’янистими та широколистими бур’янами в культурах рису, злаків та кукурудзи
Випадковий патент: Поршень для двигуна внутрішнього згорання