Система визначення найбільш придатного вогневого засобу в механізованому (танковому) підрозділі для вирішення вогневого завдання
Номер патенту: 99410
Опубліковано: 10.06.2015
Автори: Корольов Володимир Миколайович, Корольова Ольга Володимирівна, Заєць Ярослав Григорович
Формула / Реферат
Система визначення найбільш придатного вогневого засобу в механізованому (танковому) підрозділі для вирішення вогневого завдання, що містить апаратуру прийому/передачі даних (АППД), обчислювальний комплекс (ОК), пульт управління (ПУ), засоби відображення інформації (ЗВІ), модуль розрахунку часу висування підлеглої машини із зони "затінення" в зону прямої видимості цілі (МРЧ), модуль геоінформаційної системи (МПС), навігаційний комплекс (НК), пристрій спряження (ПрС), лазерний далекомір (ЛД), кутомірний прилад (КП), модуль визначення місцеположення командирської машини (ММП), модуль визначення технічного стану командирської машини (МТС), модуль визначення бойової готовності командирської машини (МБГ), системи зовнішнього цілевказування підлеглих машин (СЗЦВ), модулі визначення місцеположення підлеглих машин (ММП), модулі визначення технічного стану підлеглих машин (МТС), модулі визначення бойової готовності підлеглих машин (МБГ), яка відрізняється тим, що додатково введені модуль геоінформаційної системи (МПС) та модуль розрахунку часу висування підлеглої машини із зони "затінення" в зону прямої видимості цілі (МРЧ), причому 1-й вхід/вихід апаратури прийому/передачі даних з'єднаний з 1-м входом/виходом обчислювального комплексу, 2-й вхід/вихід обчислювального комплексу з'єднаний з 1-м входом/виходом модуля геоінформаційної системи, 3-й вхід/вихід обчислювального комплексу з'єднаний з 2-м входом/виходом пристрою спряження, 4-й вхід/вихід обчислювального комплексу з'єднаний з 1-м входом/виходом засобів відображення інформації, 5-й вхід/вихід обчислювального комплексу з'єднаний з 1-м входом/виходом модуля розрахунку часу висування підлеглої машини із зони "затінення" в зону прямої видимості цілі, 1-й вхід/вихід пульта управління з'єднаний з 1-м входом/виходом пристрою спряження, 1-й вхід/вихід навігаційного комплексу з'єднаний з 3-м входом/виходом пристрою спряження, 1-й вхід/вихід лазерного далекоміру з'єднаний з 4-м входом/виходом пристрою спряження, 5-й вхід/вихід пристрою спряження є 1-м входом/виходом системи зовнішнього цілевказування командирської машини, 1-м входом/виходом підсистеми визначення вогневого засобу командирської машини та 1-м входом/виходом системи управління вогнем командирської машини, 1-й вхід/вихід кутомірного приладу з'єднаний з 6-м входом/виходом пристрою спряження, 1-й вхід/вихід модуля визначення місцеположення командирської машини з'єднаний з 7-м входом/виходом пристрою спряження, 1-й вхід/вихід модуля визначення технічного стану командирської машини з'єднаний з 7-м входом/виходом пристрою спряження, 1-й вхід/вихід модуля визначення боєготовності командирської машини з'єднаний з 7-м входом виходом пристрою спряження, апаратура прийому/передачі даних командирської машини обмінюються інформацією по командній радіолінії з системами зовнішнього цілевказування підлеглих машин, 1-й вхід/вихід модулів визначення місцеположення підлеглих машин з'єднаний з 1-м входом/виходом систем зовнішнього цілевказування підлеглих машин, 1-й вхід/вихід модулів визначення технічного стану підлеглих машин з'єднаний з 1-м входом/виходом систем зовнішнього цілевказування підлеглих машин, 1-й вхід/вихід модулів визначення боєготовності підлеглих машин з'єднаний з 1-м входом/виходом систем зовнішнього цілевказування підлеглих машин, 2-й вхід/вихід систем зовнішнього цілевказування підлеглих машин є 1-м входом/виходом підсистеми визначення вогневого засобу підлеглих машин та 1-м входом/виходом системи управління вогнем підлеглих машин.
Текст
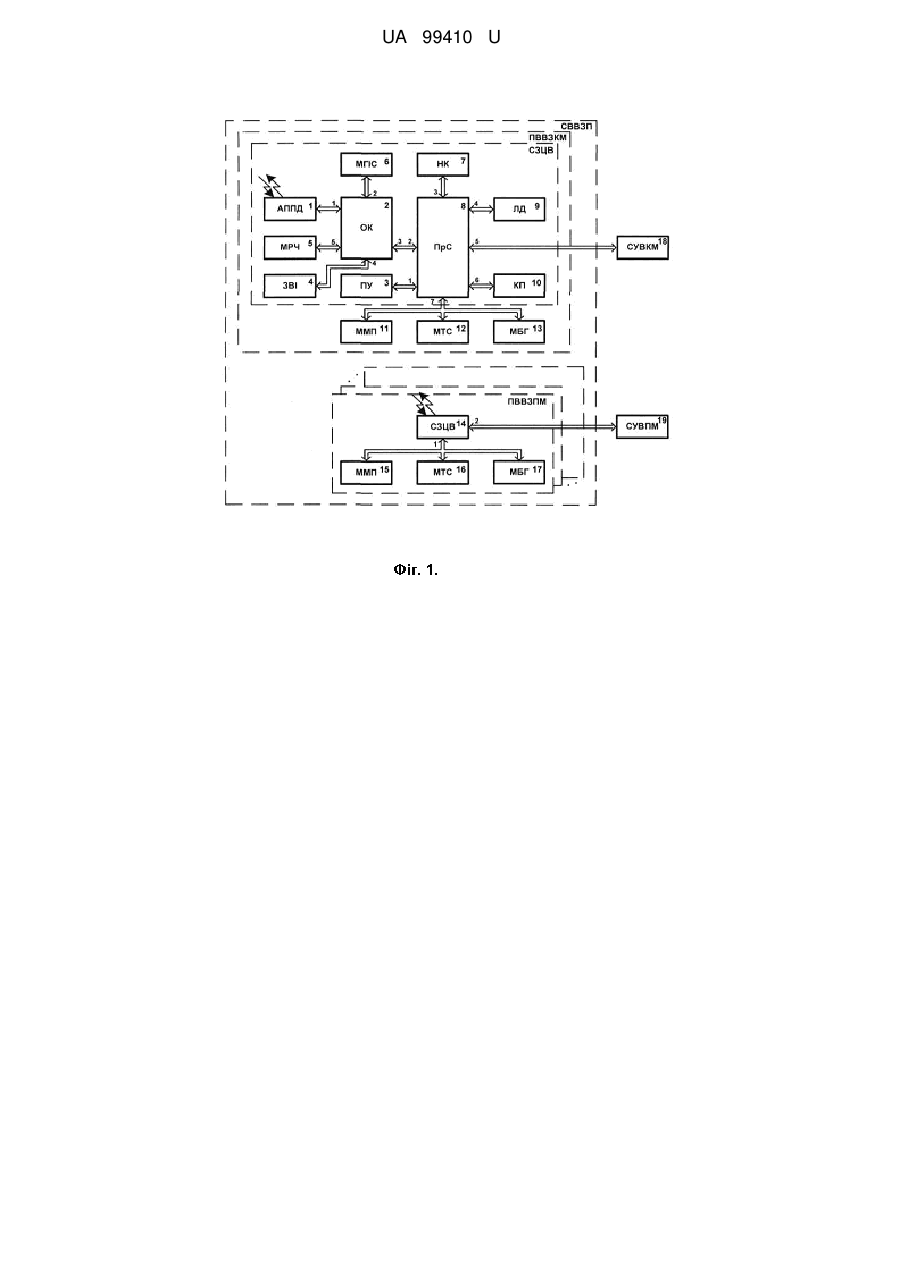
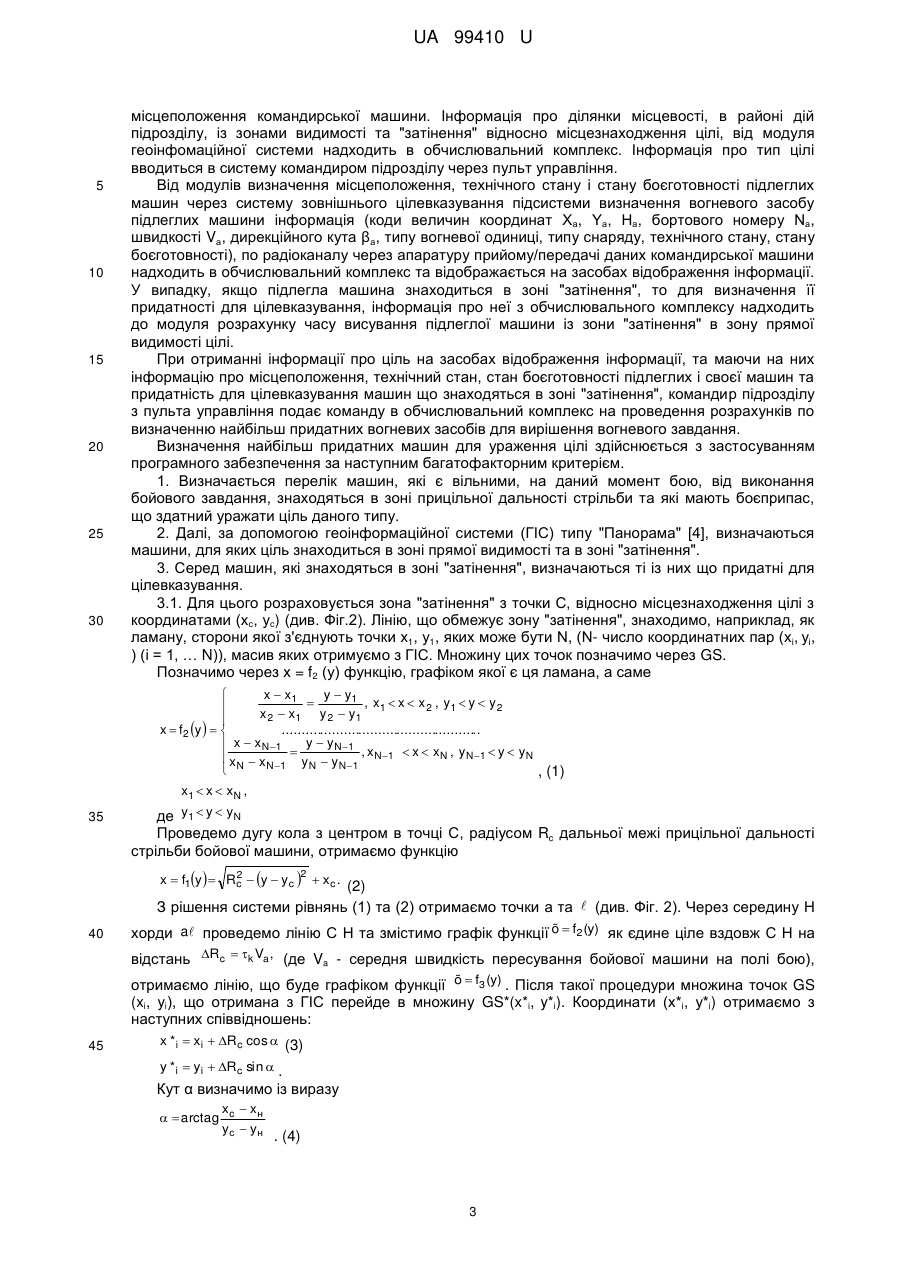
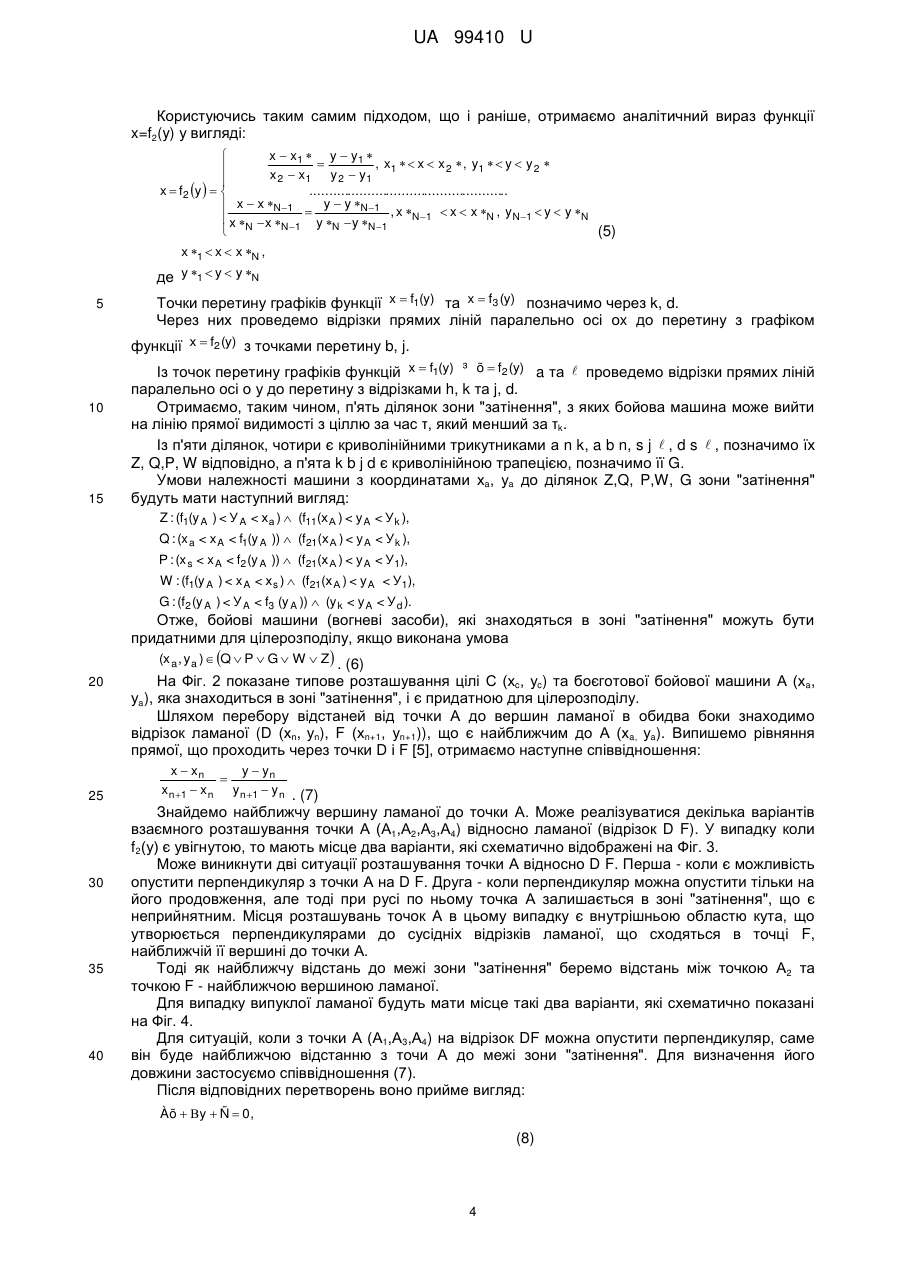
Реферат: UA 99410 U UA 99410 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі бронетанкової техніки, зокрема до засобів визначення найбільш придатного вогневого засобу в механізованому (танковому) підрозділі для вирішення вогневого завдання та його наведення на ціль. Корисна модель може бути застосована для здійснення автоматизованого розподілу вогневих засобів в механізованому (танковому) підрозділі для стрільби по цілям при вирішенні вогневих завдань. Відома система навігації "ТИУС-Н" [1], яка містить апаратуру споживача супутникових радіонавігаційних систем, інформаційний блок, пульт командира, пульт механіка-водія. Основними недоліками цієї системи є те, що: система надає інформацію командиру підрозділу про власні координати та місцезнаходження підлеглих, але не надає інформацію про ділянки місцевості, з яких спостерігається зона "затінення" по відношенню до цілі, та час висування підлеглої машини із зони "затінення" в зону прямої видимості цілі. Відома "Система зовнішнього цілевказування системи управління вогнем БМП" [2], яка містить пульт керування, оптичні прилади спостереження та прицілювання (далекомірний та кутомірний прилади), пристрій спряження, бортовий комп'ютер, дисплей для виводу інформації, комплексовану навігаційну систему, радіостанцію. Основними недоліками цієї системи є те, що визначення найбільш придатних вогневих засобів в підрозділі для вирішення вогневого завдання здійснюється самостійно командиром підрозділу лише на підставі його бойового досвіду або інтуїції. При визначенні вогневих засобів для ураження цілі не враховується інформація про ділянки місцевості, із зоною "затінення", в якій може перебувати підлегла машина по відношенню до цілі, та час висування підлеглої машини із зони "затінення" в зону прямої видимості цілі. Найбільш близькою по сукупності технічних ознак до системи, яка заявляється, є "Система визначення найбільш придатного вогневого засобу в механізованому (танковому) підрозділі для вирішення вогневого завдання" [3], що містить пульт управління, оптичні прилади спостереження та прицілювання (далекомірний та кутомірний прилади), пристрій спряження, обчислювальний комплекс, засоби відображення інформації, комплексовану навігаційну систему, апаратуру передачі даних, модулі визначення місцеположення, технічного стану, бойової готовності командирської та підлеглих машин. Основними недоліками цієї системи є те, що при визначенні найбільш придатних вогневих засобів в підрозділі для вирішення вогневого завдання щодо ураження цілі, серед бойових машин, що знаходяться в зоні "затінення" по відношенню до цілі, розглядався весь перелік машин, а не тільки ті із них, які знаходяться на ділянках зони "затінення", найближче розташованих до рубежу прямої видимості та здатні за прогнозований час τвих вийти в зону прямої видимості цілі, а також не проводився розрахунок часу на подолання відстані від місця знаходження бойової машини до прогнозованої точки виходу в зону прямої видимості цілі. В основу корисної моделі поставлено задачу удосконалити "Систему визначення найбільш придатного вогневого засобу в механізованому (танковому) підрозділі для вирішення вогневого завдання", шляхом введення до неї додаткових модулів і нових зв'язків між ними, які забезпечать визначення придатності для цілевказування бойових машин, що знаходяться в зоні "затінення" по відношенню до цілі, та збільшать перелік вогневих засобів підрозділу придатних для цілевказування по ураженню цілей (об'єктів), що дасть змогу підвищити ефективність управління механізованими (танковими) підрозділами при вирішенні вогневих завдань. Поставлена задача вирішується тим, що в "Систему визначення найбільш придатного вогневого засобу в механізованому (танковому) підрозділі для вирішення вогневого завдання", яка містить пульт управління, оптичні прилади спостереження та прицілювання (далекомірний та кутомірний прилади), пристрій спряження, обчислювальний комплекс, засоби відображення інформації, комплексовану навігаційну систему, апаратуру передачі даних, модулі визначення місцеположення, технічного стану, бойової готовності командирської та підлеглих машин, згідно з корисною моделлю, додатково введені модуль геоінформаційної системи (МПС) та модуль розрахунку часу висування підлеглої машини із зони "затінення" в зону прямої видимості цілі (МРЧ), які забезпечують визначення придатності для цілевказування бойових машин, що знаходяться в зоні "затінення" по відношенню до цілі і здатні висунутися в зону прямої видимості за обумовлений час, проведення розрахунку часу на подолання відстані від місця знаходження бойової машини до прогнозованої точки виходу в зону прямої видимості цілі. Порівняльний аналіз рішення, яке заявляється, з прототипом, показує, що запропонована система визначення найбільш придатного вогневого засобу в механізованому (танковому) підрозділі для вирішення вогневого завдання відрізняється від відомого наявністю нових інформаційних зв'язків та нових дій над сигналами які надходять в обчислювальний комплекс командирської машини від модуля геоінформаційної системи (МПС) та модуля розрахунку часу висування підлеглої машини із зони "затінення" в зону прямої видимості цілі (МРЧ), за 1 UA 99410 U 5 10 15 20 25 30 35 40 45 50 55 60 допомогою спеціального програмного забезпечення проводяться розрахунки по визначенню найбільш придатного вогневого засобу в механізованому (танковому) підрозділі для вирішення вогневого завдання, результати яких, після затвердження командиром підрозділу, автоматизовано надходять на вхід системи зовнішнього цілевказування машини, що вибрана, і далі на вхід її системи управління вогнем. Використання вищеописаної системи дозволяє здійснювати пошук бойових машин придатних для цілевказування, серед тих, що знаходяться в зоні "затінення" по відношенню до цілі, не в усій зоні а тільки у визначених її ділянках, проводити розрахунок часу на подолання відстані від місця знаходження до прогнозованої точки виходу в зону прямої видимості цілі, вибирати серед них тільки ті машини, які здатні за прийнятний час здійснити висування в зону прямої видимості цілі, таким чином зменшити час на пошук машин придатних для цілевказування із зони "затінення" та збільшити їх загальний перелік, що в цілому дасть змогу підвищити ефективність управління механізованими (танковими) підрозділами при вирішенні вогневих завдань. Суть запропонованої корисної моделі представлена на (Фіг. 1), що містить апаратуру прийому/передачі даних 1 (АППД), обчислювальний комплекс 2 (ОК), пульт управління 3 (ПУ), засоби відображення інформації 4 (ЗВІ), модуль розрахунку часу висування підлеглої машини із зони "затінення" в зону прямої видимості цілі 5 (МРЧ), модуль геоінформаційної системи 6 (МПС), навігаційний комплекс 7 (НК), пристрій спряження 8 (ПрС), лазерний далекомір 9 (ЛД), кутомірний прилад 10 (КП), модуль визначення місцеположення командирської машини 11 (ММП), модуль визначення технічного стану командирської машини 12 (МТС), модуль визначення бойової готовності командирської машини 13 (МБГ), системи зовнішнього цілевказування підлеглих машин 14 (СЗЦВ), модулі визначення місцеположення підлеглих машин 15 (ММП), модулі визначення технічного стану підлеглих машин 16 (МТС), модулі визначення бойової готовності підлеглих машин 17 (МБГ), та відрізняється тим, що додатково введені модуль геоінформаційної системи (МПС) та модуль розрахунку часу висування підлеглої машини із зони "затінення" в зону прямої видимості цілі (МРЧ), причому 1-й вхід/вихід апаратури прийому/передачі даних з'єднаний з 1-м входом/виходом обчислювального комплексу, 2-й вхід/вихід обчислювального комплексу з'єднаний з 1-м входом/виходом модуля геоінформаційної системи, 3-й вхід/вихід обчислювального комплексу з'єднаний з 2-м входом/виходом пристрою спряження, 4-й вхід/вихід обчислювального комплексу з'єднаний з 1м входом/виходом засобів відображення інформації, 5-й вхід/вихід обчислювального комплексу з'єднаний з 1-м входом/виходом модуля розрахунку часу висування підлеглої машини із зони "затінення" в зону прямої видимості цілі, 1-й вхід/вихід пульта управління з'єднаний з 1-м входом/виходом пристрою спряження, 1-й вхід/вихід навігаційного комплексу з'єднаний з 3-м входом/виходом пристрою спряження, 1-й вхід/вихід лазерного далекоміру з'єднаний з 4-м входом/виходом пристрою спряження, 5-й вхід/вихід пристрою спряження є 1-м входом/виходом системи зовнішнього цілевказування командирської машини, 1-м входом/виходом підсистеми визначення вогневого засобу командирської машини та 1-м входом/виходом системи управління вогнем командирської машини, 1-й вхід/вихід кутомірного приладу з'єднаний з 6-м входом/виходом пристрою спряження, 1-й вхід/вихід модуля визначення місцеположення командирської машини з'єднаний з 7-м входом/виходом пристрою спряження, 1-й вхід/вихід модуля визначення технічного стану командирської машини з'єднаний з 7-м входом/виходом пристрою спряження, 1-й вхід/вихід модуля визначення боєготовності командирської машини з'єднаний з 7-м входом виходом пристрою спряження, апаратура прийому/передачі даних командирської машини обмінюються інформацією по командній радіолінії з системами зовнішнього цілевказування підлеглих машин, 1-й вхід/вихід модулів визначення місцеположення підлеглих машин з'єднаний з 1-м входом/виходом систем зовнішнього цілевказування підлеглих машин, 1-й вхід/вихід модулів визначення технічного стану підлеглих машин з'єднаний з 1-м входом/виходом систем зовнішнього цілевказування підлеглих машин, 1й вхід/вихід модулів визначення боєготовності підлеглих машин з'єднаний з 1 -м входом/виходом систем зовнішнього цілевказування підлеглих машин, 2-й вхід/вихід систем зовнішнього цілевказування підлеглих машин є 1-м входом/виходом підсистеми визначення вогневого засобу підлеглих машин та 1-м входом/виходом системи управління вогнем підлеглих машин. Поставлена задача реалізується наступним чином. Інформація про ціль: дальність до неї Dc та її дирекційний кут βc, надходить з лазерного далекоміру та кутомірного приладу відповідно через пристрій спряження на обчислювальний комплекс. Інформація про місцеположення командирської машини з її навігаційного комплексу надходить через пристрій спряження до обчислювального комплексу та модуля визначення 2 UA 99410 U 5 10 15 20 25 30 місцеположення командирської машини. Інформація про ділянки місцевості, в районі дій підрозділу, із зонами видимості та "затінення" відносно місцезнаходження цілі, від модуля геоінфомаційної системи надходить в обчислювальний комплекс. Інформація про тип цілі вводиться в систему командиром підрозділу через пульт управління. Від модулів визначення місцеположення, технічного стану і стану боєготовності підлеглих машин через систему зовнішнього цілевказування підсистеми визначення вогневого засобу підлеглих машини інформація (коди величин координат Ха, Υа, На, бортового номеру Νа, швидкості Vа, дирекційного кута β а, типу вогневої одиниці, типу снаряду, технічного стану, стану боєготовності), по радіоканалу через апаратуру прийому/передачі даних командирської машини надходить в обчислювальний комплекс та відображається на засобах відображення інформації. У випадку, якщо підлегла машина знаходиться в зоні "затінення", то для визначення її придатності для цілевказування, інформація про неї з обчислювального комплексу надходить до модуля розрахунку часу висування підлеглої машини із зони "затінення" в зону прямої видимості цілі. При отриманні інформації про ціль на засобах відображення інформації, та маючи на них інформацію про місцеположення, технічний стан, стан боєготовності підлеглих і своєї машин та придатність для цілевказування машин що знаходяться в зоні "затінення", командир підрозділу з пульта управління подає команду в обчислювальний комплекс на проведення розрахунків по визначенню найбільш придатних вогневих засобів для вирішення вогневого завдання. Визначення найбільш придатних машин для ураження цілі здійснюється з застосуванням програмного забезпечення за наступним багатофакторним критерієм. 1. Визначається перелік машин, які є вільними, на даний момент бою, від виконання бойового завдання, знаходяться в зоні прицільної дальності стрільби та які мають боєприпас, що здатний уражати ціль даного типу. 2. Далі, за допомогою геоінформаційної системи (ГІС) типу "Панорама" [4], визначаються машини, для яких ціль знаходиться в зоні прямої видимості та в зоні "затінення". 3. Серед машин, які знаходяться в зоні "затінення", визначаються ті із них що придатні для цілевказування. 3.1. Для цього розраховується зона "затінення" з точки С, відносно місцезнаходження цілі з координатами (хс, ус) (див. Фіг.2). Лінію, що обмежує зону "затінення", знаходимо, наприклад, як ламану, сторони якої з'єднують точки х1, у1, яких може бути Ν, (Ν- число координатних пар (хі, уі, ) (і = 1, … N)), масив яких отримуємо з ГІС. Множину цих точок позначимо через GS. Позначимо через х = f2 (у) функцію, графіком якої є ця ламана, а саме x x1 y y1 , x1 x x 2 , y1 y y 2 x 2 x 1 y 2 y1 x f2 y .................................................... x xN 1 y y N1 , x N 1 x x N , y N 1 y y N x x N 1 y N y N 1 N , (1) x1 x xN , 35 де y1 y yN Проведемо дугу кола з центром в точці С, радіусом Rc дальньої межі прицільної дальності стрільби бойової машини, отримаємо функцію 2 x f1y Rc y yc 2 xc . (2) З рішення системи рівнянь (1) та (2) отримаємо точки а та (див. Фіг. 2). Через середину Η 40 хорди a проведемо лінію С Η та змістимо графік функції õ f2 (y) як єдине ціле вздовж С Η на відстань Rc k Va , (де Va - середня швидкість пересування бойової машини на полі бою), отримаємо лінію, що буде графіком функції õ f3 (y) . Після такої процедури множина точок GS (xi, уi), що отримана з ГІС перейде в множину GS*(x*i, y*i). Координати (х*i, у*i) отримаємо з наступних співвідношень: 45 x *i xi Rc cos (3) y *i yi Rc sin . Кут α визначимо із виразу arctag x c xн у с ун . (4) 3 UA 99410 U Користуючись таким самим підходом, що і раніше, отримаємо аналітичний вираз функції x=f2(y) у вигляді: x x1 y y1 , x1 x x 2 , y1 y y 2 x 2 x1 y 2 y 1 x f2 y .................................................... x x N 1 y y N1 , x N 1 x x N , y N 1 y y N x x N 1 y N y N 1 N (5) x 1 x x N , де y 1 y y N 5 Точки перетину графіків функції x f1(y) та x f3 (y) позначимо через k, d. Через них проведемо відрізки прямих ліній паралельно осі оx до перетину з графіком функції x f2 (y) з точками перетину b, j. 10 15 Із точок перетину графіків функцій x f1(y) ³ õ f2 (y) a та проведемо відрізки прямих ліній паралельно осі о у до перетину з відрізками h, k та j, d. Отримаємо, таким чином, п'ять ділянок зони "затінення", з яких бойова машина може вийти на лінію прямої видимості з ціллю за час τ, який менший за τk. Із п'яти ділянок, чотири є криволінійними трикутниками а n k, a b n, s j , d s , позначимо їх Z, Q,P, W відповідно, а п'ята k b j d є криволінійною трапецією, позначимо її G. Умови належності машини з координатами хa, уa до ділянок Ζ,Q, P,W, G зони "затінення" будуть мати наступний вигляд: Z : (f1(y A ) < У A < х а ) (f11(х А ) < у A < У k ), Q : (x a < x A < f1(y A )) (f21(х А ) < у A < У k ), Р : (x s < x A < f2 (y A )) (f21(х А ) < у A < У1), W : (f1(y A ) < x A < х s ) (f21(х А ) < у A < У1), G : (f2 (y A ) < У A < f3 (y A )) (y k < у A < У d ). Отже, бойові машини (вогневі засоби), які знаходяться в зоні "затінення" можуть бути придатними для цілерозподілу, якщо виконана умова (x a , ya ) Q P G W Z . (6) 20 25 30 35 40 На Фіг. 2 показане типове розташування цілі С (хc, уc) та боєготової бойової машини А (хa, уa), яка знаходиться в зоні "затінення", і є придатною для цілерозподілу. Шляхом перебору відстаней від точки А до вершин ламаної в обидва боки знаходимо відрізок ламаної (D (хn, уn), F (хn+1, уn+1)), що є найближчим до А (хa, уa). Випишемо рівняння прямої, що проходить через точки D і F [5], отримаємо наступне співвідношення: x xn y yn x n 1 x n y n 1 y n . (7) Знайдемо найближчу вершину ламаної до точки А. Може реалізуватися декілька варіантів взаємного розташування точки А (А1,А2,А3,А4) відносно ламаної (відрізок D F). У випадку коли f2(у) є увігнутою, то мають місце два варіанти, які схематично відображені на Фіг. 3. Може виникнути дві ситуації розташування точки А відносно D F. Перша - коли є можливість опустити перпендикуляр з точки А на D F. Друга - коли перпендикуляр можна опустити тільки на його продовження, але тоді при русі по ньому точка А залишається в зоні "затінення", що є неприйнятним. Місця розташувань точок А в цьому випадку є внутрішньою областю кута, що утворюється перпендикулярами до сусідніх відрізків ламаної, що сходяться в точці F, найближчій її вершині до точки А. Тоді як найближчу відстань до межі зони "затінення" беремо відстань між точкою А2 та точкою F - найближчою вершиною ламаної. Для випадку випуклої ламаної будуть мати місце такі два варіанти, які схематично показані на Фіг. 4. Для ситуацій, коли з точки Α (А1,А3,А4) на відрізок DF можна опустити перпендикуляр, саме він буде найближчою відстанню з точи А до межі зони "затінення". Для визначення його довжини застосуємо співвідношення (7). Після відповідних перетворень воно прийме вигляд: Àõ y Ñ 0, (8) 4 UA 99410 U óñ - ó ; Â x - xC; де Ñ x C x . Нормалізуємо рівняння (8), тоді його можна записати у вигляді: x cos y sin 0 , (9) ; C arctg 5 2 . 2 де Враховуючи, що співвідношення (9) є нормальним рівнянням прямої, відстань d від точки хa, уa до неї визначимо за співвідношенням d xacos y a sin . (10) Тоді час τвих виходу бойової машини на лінію прямої видимості з ціллю знайдемо із співвідношення вих 10 15 20 25 30 d Va (11) 3.2. Застосовуючи співвідношення (10), визначається відстань від місця знаходження підлеглої машини до прогнозованої точки виходу із зони "затінення" на рубіж прямої видимості цілі. 3.3. Застосовуючи співвідношення (11), визначається прогнозований час τвих виходу машини із зони "затінення" на рубіж прямої видимості. 3.4. При умові що τвих
ДивитисяДодаткова інформація
Автори англійськоюKoroliov Volodymyr Mykolaiovych, Koroliova Olha Volodymyrivna
Автори російськоюКоролев Владимир Николаевич, Королева Ольга Владимировна
МПК / Мітки
МПК: F41C 3/00
Мітки: визначення, завдання, механізованому, засобу, найбільш, підрозділі, вогневого, придатного, танковому, система, вирішення
Код посилання
<a href="https://ua.patents.su/10-99410-sistema-viznachennya-najjbilsh-pridatnogo-vognevogo-zasobu-v-mekhanizovanomu-tankovomu-pidrozdili-dlya-virishennya-vognevogo-zavdannya.html" target="_blank" rel="follow" title="База патентів України">Система визначення найбільш придатного вогневого засобу в механізованому (танковому) підрозділі для вирішення вогневого завдання</a>
Система визначення найбільш придатного вогневого засобу в механізованому (танковому) підрозділі для вирішення вогневого завдання
Номер патенту: 82039
Опубліковано: 25.07.2013
Автори: Корольов Володимир Миколайович, Заєць Ярослав Григорович
МПК: F41C 3/00
Мітки: вирішення, механізованому, завдання, найбільш, танковому, вогневого, визначення, придатного, засобу, система, підрозділі
Формула / Реферат:
Система визначення найбільш придатного вогневого засобу в механізованому (танковому) підрозділі для вирішення вогневого завдання, що містить модулі визначення місцеположення, технічного стану, бойової готовності командирської та підлеглих машин, пристрій спряження, яка відрізняється тим, що додатково вводяться модулі визначення місцеположення (ММП), технічного стану (МТС), бойової готовності командирської машини (МБГ KM) та ПМ (підлеглих...
Система зовнішнього цілевказування системи управління вогнем бмп
Номер патенту: 54030
Опубліковано: 25.10.2010
Автор: Руденко Кирил Вікторович
МПК: F41C 3/00
Мітки: бмп, цілевказування, система, системі, управління, вогнем, зовнішнього
Формула / Реферат:
Система зовнішнього цілевказування системи управління вогнем БМП, яка містить пульт керування системи управління вогнем, оптичні прилади спостереження та прицілювання, систему стабілізації озброєння, яка відрізняється тим, що додатково містить лазерний далекомір, пристрій перетворення сигналів, бортовий комп'ютер, програмне забезпечення, дисплей для виводу інформації, систему навігації.
Система визначення місцеположення рухомих об’єктів
Номер патенту: 76146
Опубліковано: 25.12.2012
Автори: Кошелева Марія Миколаївна, Дергачов Костянтин Юрійович, Кулік Анатолій Степанович
МПК: G01S 3/02
Мітки: об'єктів, рухомих, визначення, місцеположення, система
Формула / Реферат:
Система визначення місцеположення рухомих об'єктів, яка містить глобальну супутникову систему, вхід якої з'єднаний з виходом передавача, а вихід з'єднаний з приймачем, передавач розміщений на рухомому об'єкті, керуючий контролер, вхід якого з'єднаний з виходом приймача, а вихід з входом енергонезалежного зберігача інформації, систему стабілізації живлення, вхід якої з'єднаний з виходом джерела живлення та акумулятором, а вихід з'єднаний з...
Система визначення місцезнаходження рухомого об’єкта
Номер патенту: 76139
Опубліковано: 25.12.2012
Автори: Литвиненко Тетяна Вікторівна, Кулік Анатолій Степанович, Дергачов Костянтин Юрійович
МПК: G01S 3/02
Мітки: визначення, об'єкта, місцезнаходження, система, рухомого
Формула / Реферат:
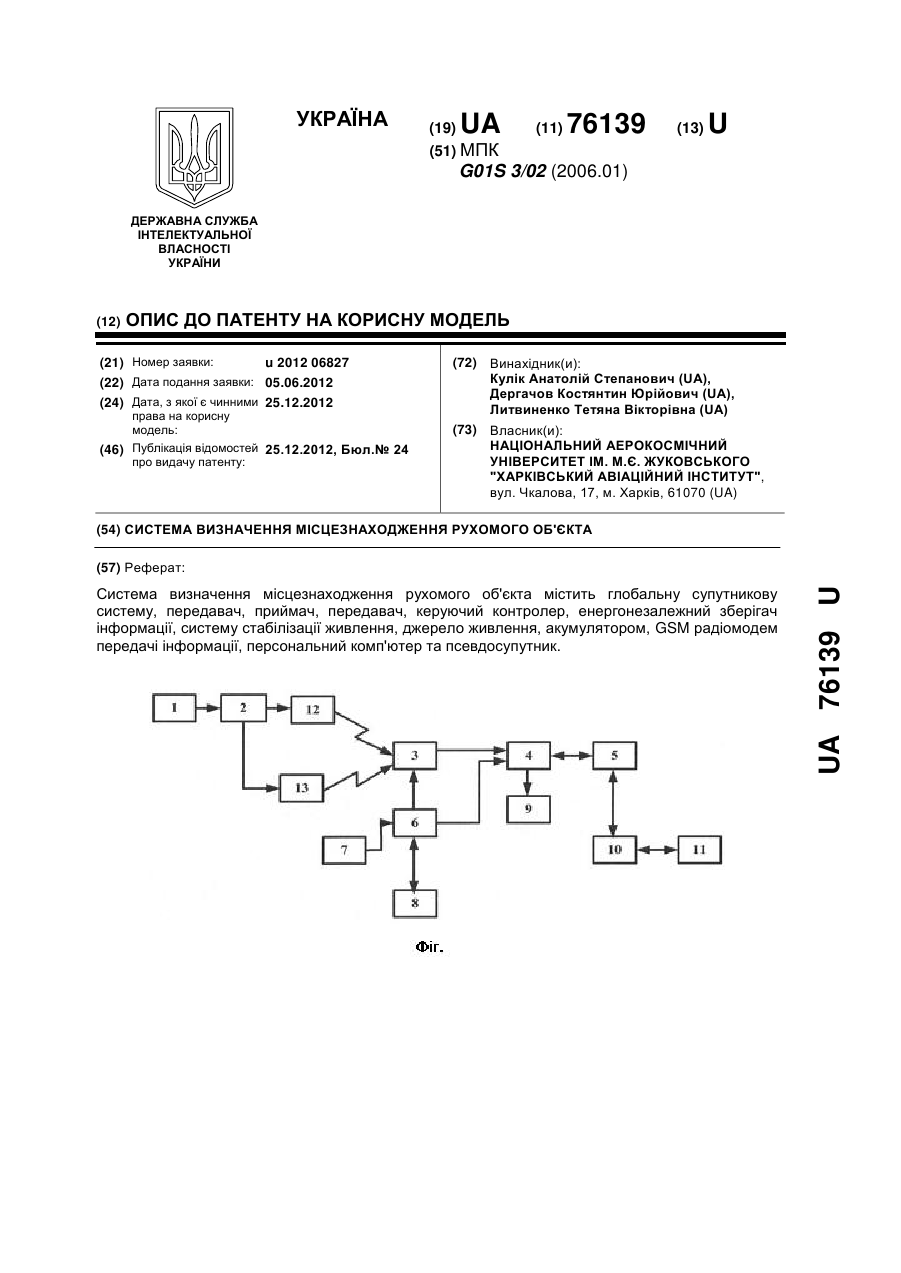
Система визначення місцезнаходження рухомого об'єкта, що містить глобальну супутникову систему, вхід якої з'єднаний з виходом передавача, а вихід з'єднаний з приймачем, передавач розміщений на рухомому об'єкті, керуючий контролер, вхід якого з'єднаний з виходом приймача, а вихід - з входом енергонезалежного зберігача інформації, систему стабілізації живлення, вхід якої з'єднаний з виходом джерела живлення та акумулятором, а вихід з'єднаний з...
Система керування ракети в каналі тангажа
Номер патенту: 98664
Опубліковано: 12.05.2015
Автори: Дорощук Катерина Ігорівна, Симонов Володимир Федорович
МПК: B64C 13/16
Мітки: тангажа, ракети, каналі, керування, система
Формула / Реферат:
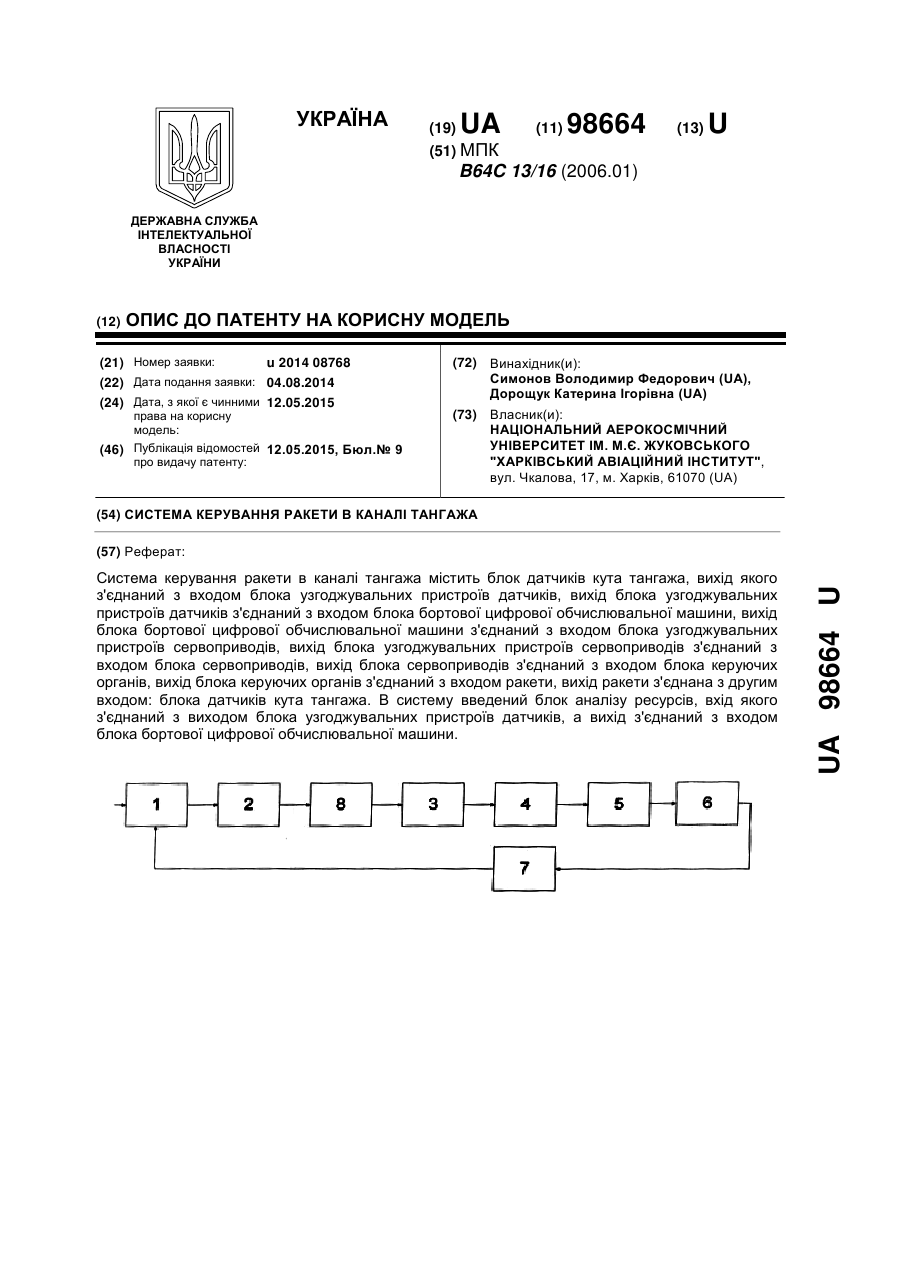
Система керування ракети в каналі тангажа, яка містить блок датчиків кута тангажа, вихід якого з'єднаний з входом блока узгоджувальних пристроїв датчиків, вихід блока узгоджувальних пристроїв датчиків з'єднаний з входом блока бортової цифрової обчислювальної машини, вихід блока бортової цифрової обчислювальної машини з'єднаний з входом блока узгоджувальних пристроїв сервоприводів, вихід блока узгоджувальних пристроїв сервоприводів з'єднаний...
Попередній патент: Патрон для закріплення осьового ріжучого інструменту
Наступний патент: Спосіб моделювання у multisim дисперсійних аналізаторів
Випадковий патент: Пристрій для автоматичного керування електроспоживанням технологічної установки