Система визначення місцеположення рухомих об’єктів
Номер патенту: 76146
Опубліковано: 25.12.2012
Автори: Кулік Анатолій Степанович, Дергачов Костянтин Юрійович, Кошелева Марія Миколаївна

Формула / Реферат
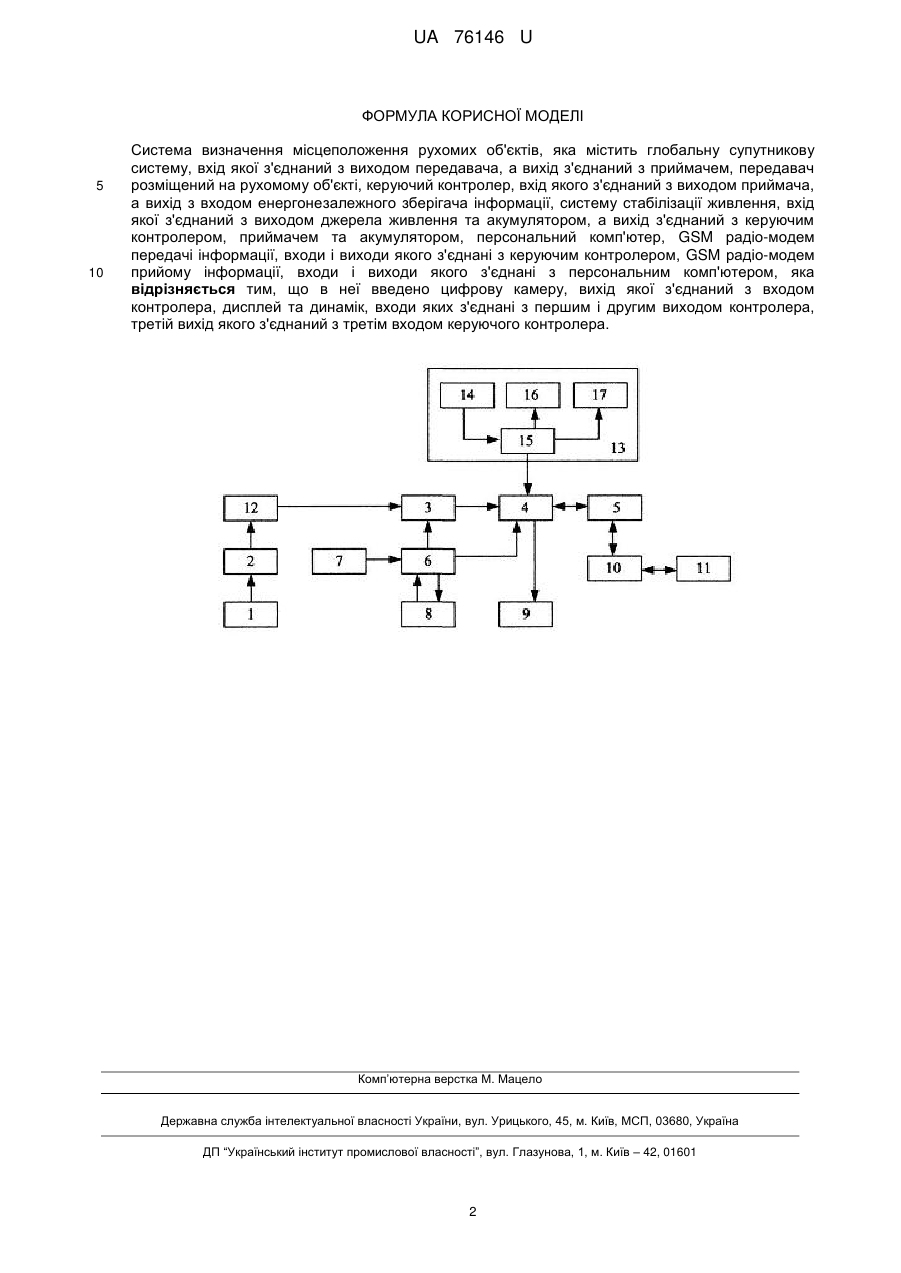
Система визначення місцеположення рухомих об'єктів, яка містить глобальну супутникову систему, вхід якої з'єднаний з виходом передавача, а вихід з'єднаний з приймачем, передавач розміщений на рухомому об'єкті, керуючий контролер, вхід якого з'єднаний з виходом приймача, а вихід з входом енергонезалежного зберігача інформації, систему стабілізації живлення, вхід якої з'єднаний з виходом джерела живлення та акумулятором, а вихід з'єднаний з керуючим контролером, приймачем та акумулятором, персональний комп'ютер, GSM радіо-модем передачі інформації, входи і виходи якого з'єднані з керуючим контролером, GSM радіо-модем прийому інформації, входи і виходи якого з'єднані з персональним комп'ютером, яка відрізняється тим, що в неї введено цифрову камеру, вихід якої з'єднаний з входом контролера, дисплей та динамік, входи яких з'єднані з першим і другим виходом контролера, третій вихід якого з'єднаний з третім входом керуючого контролера.
Текст
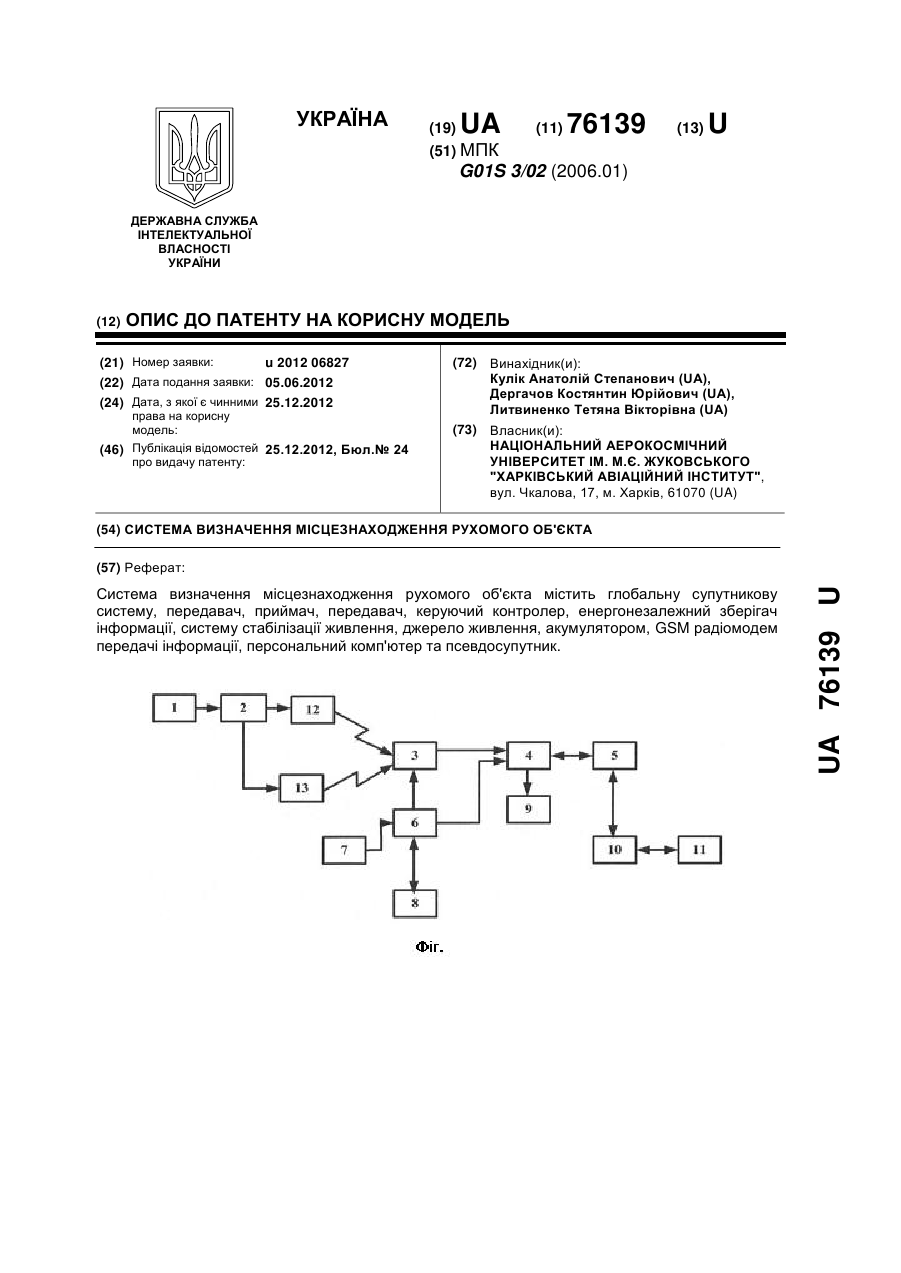
Реферат: UA 76146 U UA 76146 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до області навігації і може використовуватись для здійснення оперативного контролю за переміщенням рухомих об'єктів в аеропорту. Найбільш близькою є система відображення місцезнаходження рухомих об'єктів, узята як прототип, що містить глобальну супутникову систему, вхід якої з'єднаний з виходом передавача, а вихід з'єднаний з приймачем, передавач розміщений на рухомому об'єкті, керуючий контролер, вхід якого з'єднаний з виходом приймача, а вихід з входом енергонезалежного зберігача інформації, систему стабілізації живлення, вхід якої з'єднаний з виходом джерела живлення та акумулятором, а вихід з'єднаний з керуючим контролером, приймачем та акумулятором, персональний комп'ютер, GSM радіо-модем передачі інформації, входи і виходи якого з'єднані з керуючим контролером, GSM радіо-модем прийому інформації, входи і виходи якого з'єднані з персональним комп'ютером (див. патент України на корисну модель №55408 G01S 3/02. Система автоматичного виявлення місцезнаходження рухомого об'єкта. Опубліковано в бюл. № 23, 2010 р.). Недоліком цієї системи є неможливість рухомого об'єкта самостійно передбачати та заздалегідь реагувати на аварійні ситуації. Задачею корисної моделі є підвищення безпеки руху транспорту за рахунок введення в систему блока запобігання аварійних ситуацій. Поставлена задача вирішується тим, що в систему визначення місцеположення рухомих об'єктів, яка містить глобальну супутникову систему, вхід якої з'єднаний з виходом передавача, а вихід з'єднаний з приймачем, передавач розміщений на рухомому об'єкті, керуючий контролер, вхід якого з'єднаний з виходом приймача, а вихід з входом енергонезалежного зберігача інформації, систему стабілізації живлення, вхід якої з'єднаний з виходом джерела живлення та акумулятором, а вихід з'єднаний з керуючим контролером, приймачем та акумулятором, персональний комп'ютер, GSM радіо-модем передачі інформації, входи і виходи якого з'єднані з керуючим контролером, GSM радіо-модем прийому інформації, входи і виходи якого з'єднані з персональним комп'ютером, відповідно до корисної моделі, введено блок для запобігання аварійних ситуацій, вихід якої з'єднаний з керуючим контролером. На кресленні показана блок-схема системи визначення місцеположення рухомих об'єктів. Система визначення місцеположення рухомих об'єктів містить глобальну супутникову систему 12, вхід якої з'єднаний з виходом передавача 2, а вихід з'єднаний з приймачем 3, передавач 2 розміщений на рухомому об'єкті 1, керуючий контролер 4, перший вхід якого з'єднаний з виходом приймача 3, а вихід з входом енергонезалежного зберігача інформації 9, систему стабілізації живлення 6, вхід якої з'єднаний з виходом джерела живлення 7 та акумулятором 8, а вихід з'єднаний з другим входом керуючого контролера 4, приймачем 3 та акумулятором 8, персональний комп'ютер 11, GSM радіо-модем передачі інформації 5, входи і виходи якого з'єднані з керуючим контролером 4 та з GSM радіо-модемом прийому інформації 10, входи та виходи якого з'єднані з персональним комп'ютером 11, систему запобігання аварійних ситуацій 13, яка містить цифрову камеру 14, вихід якої з'єднаний з входом контролера 15, дисплей 16, вхід якого з'єднаний з першим виходом контролера 15, динамік 17, вхід якого з'єднаний з другим виходом контролера 15, третій вихід якого з'єднаний з третім входом керуючого контролера 4. Запропонована система працює наступним чином. Глобальна супутникова система 12 та передавач 2 передають інформацію про координати рухомого об'єкта 1 на приймач 3. Цифрова камера 14 системи запобігання аварійних ситуацій приймає зображення з дороги та передає його до вбудованого контролера 15, який обробляє інформацію. Прийняту інформацію про координати рухомого об'єкта та інформацію про відстань між найближчими рухомими об'єктами, що надходить з контролера 15 системи запобігання аварійних ситуацій 13, керуючий контролер 4 перетворює в формат, який далі GSM радіо-модем передачі інформації 5 передає на GSM радіо-модем прийому інформації 10, який прийняту інформацію передає на персональний комп'ютер 11, де дані про місцезнаходження рухомого об'єкта відображаються на екрані монітору за допомогою засобів картографічної підтримки. Живлення системи здійснюється через систему стабілізації живлення 6 за рахунок джерела живлення 7 або через акумулятор 8. Інформація про координати рухомого об'єкта 1 також зберігаються в енергонезалежному зберігачі інформації 9. Таким чином, запропонована система дозволяє оперативно відображати місцезнаходження рухомих об'єктів, здійснювати контроль за цими об'єктами, використовувати прийняту інформацію та зберігати її в базах даних, дозволяє об'єктам самостійно контролювати своє положення відносно інших рухомих об'єктів та завдяки введенню блока для запобігання аварійних ситуацій підвищувати безпеку руху. 60 1 UA 76146 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 Система визначення місцеположення рухомих об'єктів, яка містить глобальну супутникову систему, вхід якої з'єднаний з виходом передавача, а вихід з'єднаний з приймачем, передавач розміщений на рухомому об'єкті, керуючий контролер, вхід якого з'єднаний з виходом приймача, а вихід з входом енергонезалежного зберігача інформації, систему стабілізації живлення, вхід якої з'єднаний з виходом джерела живлення та акумулятором, а вихід з'єднаний з керуючим контролером, приймачем та акумулятором, персональний комп'ютер, GSM радіо-модем передачі інформації, входи і виходи якого з'єднані з керуючим контролером, GSM радіо-модем прийому інформації, входи і виходи якого з'єднані з персональним комп'ютером, яка відрізняється тим, що в неї введено цифрову камеру, вихід якої з'єднаний з входом контролера, дисплей та динамік, входи яких з'єднані з першим і другим виходом контролера, третій вихід якого з'єднаний з третім входом керуючого контролера. Комп’ютерна верстка М. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for determination of location of movable objects
Автори англійськоюKulik Anatolii Stepanovych, Derhachov Kostiantyn Yuriiovych, Kosheleva Maria Mykolaivna
Назва патенту російськоюСистема определения местоположения подвижных объектов
Автори російськоюКулик Анатолий Степанович, Дергачов Константин Юрьевич, Кошелева Мария Николаевна
МПК / Мітки
МПК: G01S 3/02
Мітки: система, рухомих, об'єктів, місцеположення, визначення
Код посилання
<a href="https://ua.patents.su/4-76146-sistema-viznachennya-miscepolozhennya-rukhomikh-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Система визначення місцеположення рухомих об’єктів</a>
Система автоматичного виявлення місцезнаходження рухомого об’єкта
Номер патенту: 55408
Опубліковано: 10.12.2010
Автори: Дергачов Костянтин Юрійович, Сосницький Віталій Валерійович, Кулік Анатолій Степанович
МПК: G01S 3/02
Мітки: місцезнаходження, система, автоматичного, виявлення, рухомого, об'єкта
Формула / Реферат:
Система автоматичного виявлення місцезнаходження рухомого об'єкта, яка містить глобальну супутникову систему, вхід якої з'єднаний з виходом передавача, а вихід з'єднаний з приймачем, передавач розміщений на рухомому об'єкті, керуючий контролер, вхід якого з'єднаний з виходом приймача, а вихід з входом енергонезалежного зберігача інформації, систему стабілізації живлення, вхід якої з'єднаний з виходом джерела живлення та акумулятором, а вихід...
Система визначення місцезнаходження рухомого об’єкта
Номер патенту: 76139
Опубліковано: 25.12.2012
Автори: Дергачов Костянтин Юрійович, Литвиненко Тетяна Вікторівна, Кулік Анатолій Степанович
МПК: G01S 3/02
Мітки: рухомого, об'єкта, система, місцезнаходження, визначення
Формула / Реферат:
Система визначення місцезнаходження рухомого об'єкта, що містить глобальну супутникову систему, вхід якої з'єднаний з виходом передавача, а вихід з'єднаний з приймачем, передавач розміщений на рухомому об'єкті, керуючий контролер, вхід якого з'єднаний з виходом приймача, а вихід - з входом енергонезалежного зберігача інформації, систему стабілізації живлення, вхід якої з'єднаний з виходом джерела живлення та акумулятором, а вихід з'єднаний з...
Система визначення місцеположення і ідентифікації рухомих об’єктів, обладнаних радіодатчиком
Номер патенту: 20426
Опубліковано: 15.07.1997
Автори: Гудзюк Василь Петрович, Мальцев Вадим Олександрович, Муратов Олександр Олексійович, Сирма Олексій Олексійович, Баскаков Юрій Георгійович, Литвиненко Валентин Іванович, Лігінов Сергій Михайлович, Грішін Леонід Андрійович, Мєдвєдєв Сергій Леонідович
Мітки: система, рухомих, визначення, об'єктів, обладнаних, ідентифікації, радіодатчиком, місцеположення
Формула / Реферат:
Система определения местоположения и идентификации подвижных объектов, оборудованных радиодатчиком, содержащая N пространственно разнесенных постов пеленгования с известными координатами, причем N больше или равно 3, и центральный пост с известными координатами, причем каждый радиодатчик подвижных объектов включает датчик дверей, вибродатчик, выходы которых подключены к входам устройства сопряжения, устроиство управления, один вход...
Система для супроводження рухомих об’єктів
Номер патенту: 38860
Опубліковано: 26.01.2009
Автори: Бугрімов Дмитро Дмитрович, Мусієнко Дмитро Іванович, Яковенко Олександр Васильович, Лоторєв Володимир Олександрович, Белогуров Володимир Андрійович, Ярмиш Олександр Назарович
МПК: G01S 5/14
Мітки: об'єктів, система, супроводження, рухомих
Формула / Реферат:
1. Система для супроводження рухомих об'єктів, що містить рухомий об'єкт, пульт контролю, основну і додаткові базові станції та супутники NAVSTAR, при цьому до складу рухомого об'єкта входять GSM-модем, система активізації, GPS-приймач з антеною та блок живлення з комутуючими ключами, до складу пульта контролю входять GSM-модем, контролер пульта контролю та ПЕОМ з монітором і програмним забезпеченням, що вводиться в ПЕОМ, кількість супутників...
Система керування місцезнаходженням рухомого об’єкта
Номер патенту: 55409
Опубліковано: 10.12.2010
Автори: Гуш Роман Миколайович, Кулік Анатолій Степанович, Дергачов Костянтин Юрійович, Кописов Олег Едуардович
МПК: G08G 1/0968
Мітки: система, місцезнаходженням, керування, рухомого, об'єкта
Формула / Реферат:
Система керування місцезнаходженням рухомого об'єкта, що містить глобальну супутникову систему, перший вхід якої з'єднаний з виходом передавача, а перший вихід з'єднаний з приймачем, керуючий контролер, вхід якого з'єднаний з приймачем, а виходи з'єднані з енергонезалежним зберігачем інформації та пристроєм індикації та зв'язку з персональним комп'ютером, джерело живлення, вихід якого через підсистему стабілізації живлення з'єднаний з...
Попередній патент: Спосіб управління доменною плавкою
Наступний патент: Формувач періодичної послідовності імпульсів з програмованою тривалістю і фіксованою шпаруватістю, яка дорівнює десяти
Випадковий патент: Пристрій для одержання газомеханічної піни