Система визначення місцезнаходження рухомого об’єкта
Номер патенту: 76139
Опубліковано: 25.12.2012
Автори: Литвиненко Тетяна Вікторівна, Дергачов Костянтин Юрійович, Кулік Анатолій Степанович

Формула / Реферат
Система визначення місцезнаходження рухомого об'єкта, що містить глобальну супутникову систему, вхід якої з'єднаний з виходом передавача, а вихід з'єднаний з приймачем, передавач розміщений на рухомому об'єкті, керуючий контролер, вхід якого з'єднаний з виходом приймача, а вихід - з входом енергонезалежного зберігача інформації, систему стабілізації живлення, вхід якої з'єднаний з виходом джерела живлення та акумулятором, а вихід з'єднаний з керуючим контролером, приймачем та акумулятором, GSM радіомодем передачі інформації, входи і виходи якого з'єднані з керуючим контролером і GSM радіомодемом прийому інформації, входи і виходи якого з'єднані з персональним комп'ютером, яка відрізняється тим, що в неї введено псевдосупутник, вхід якого з'єднаний з виходом передавача, а вихід з'єднаний з приймачем.
Текст
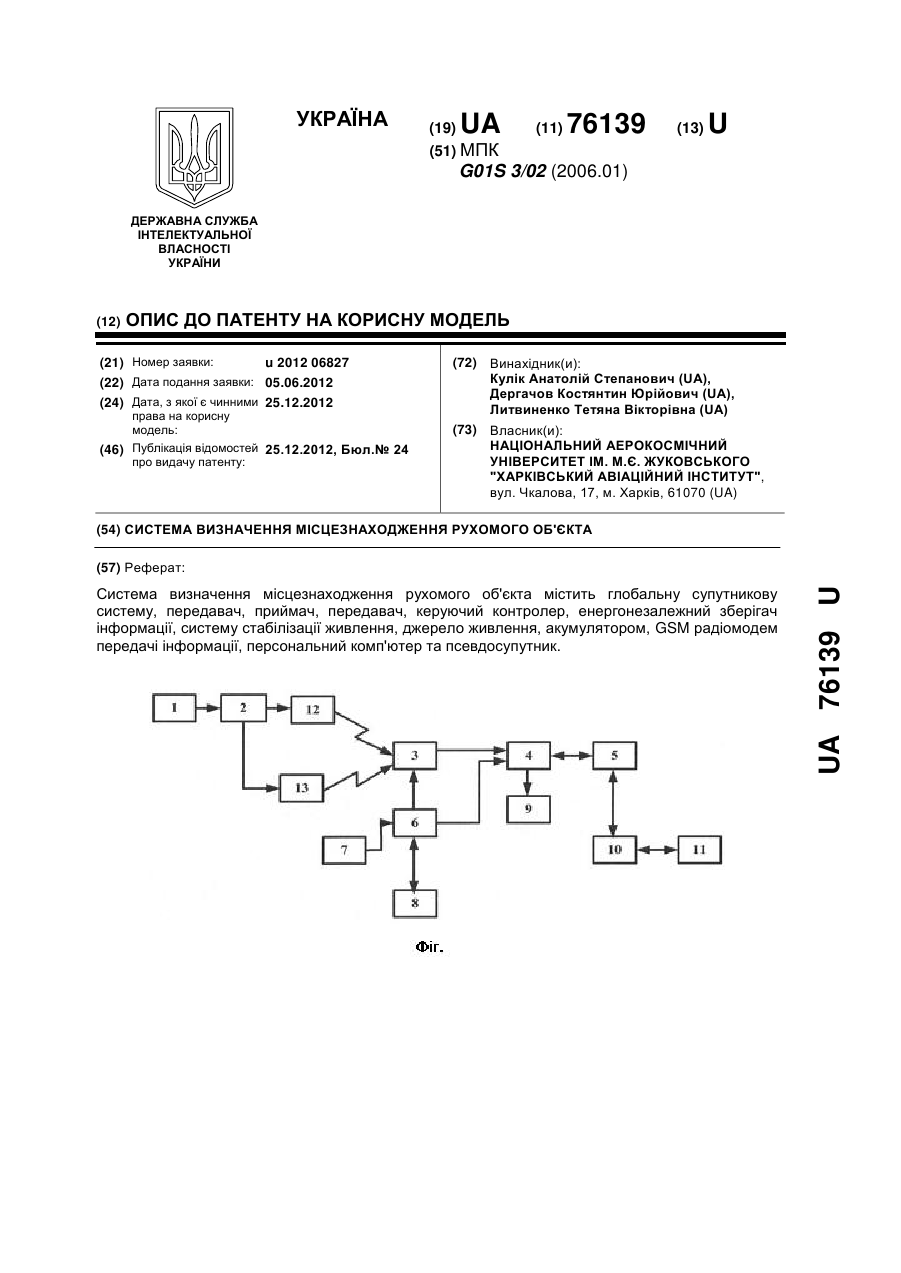
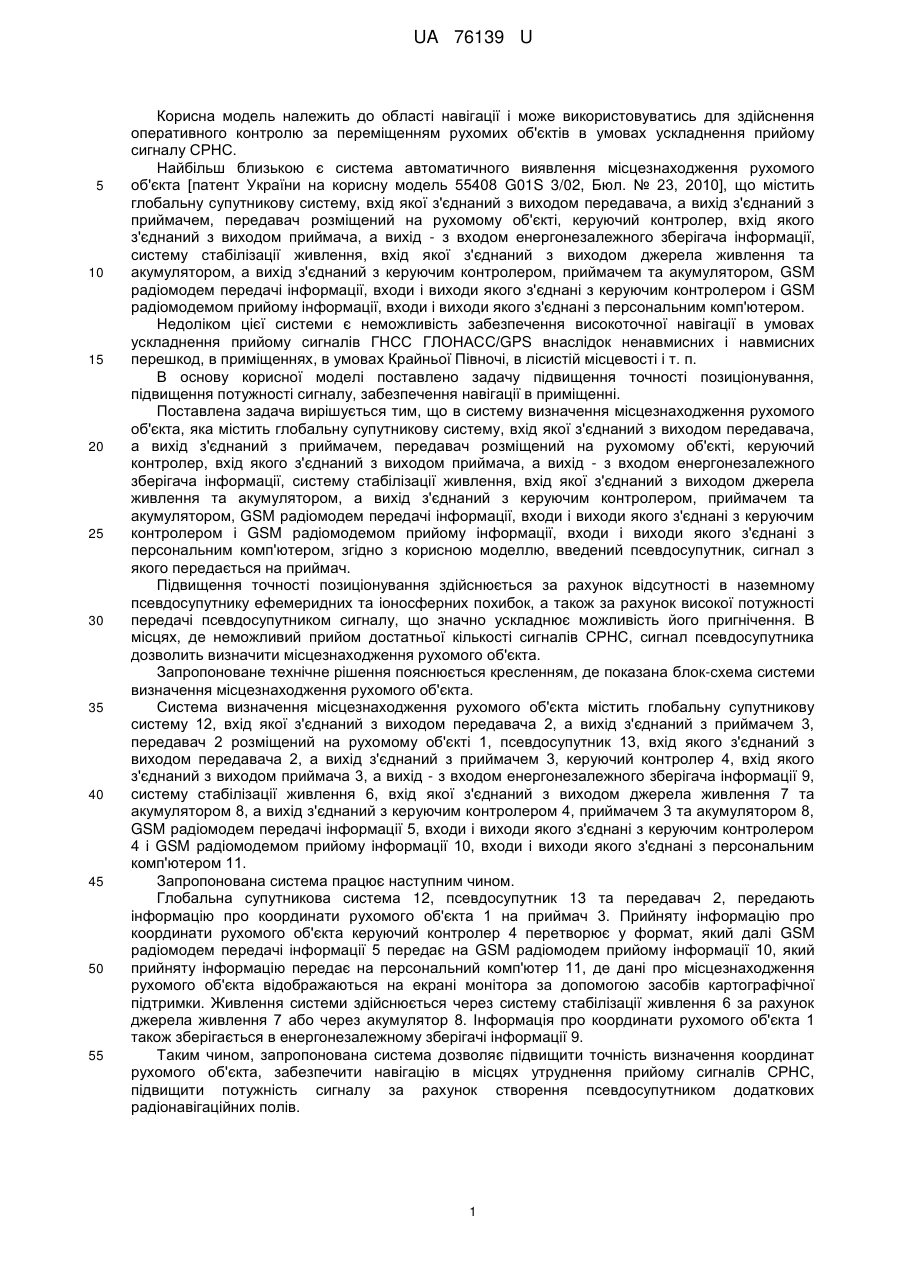
Реферат: UA 76139 U UA 76139 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до області навігації і може використовуватись для здійснення оперативного контролю за переміщенням рухомих об'єктів в умовах ускладнення прийому сигналу СРНС. Найбільш близькою є система автоматичного виявлення місцезнаходження рухомого об'єкта [патент України на корисну модель 55408 G01S 3/02, Бюл. № 23, 2010], що містить глобальну супутникову систему, вхід якої з'єднаний з виходом передавача, а вихід з'єднаний з приймачем, передавач розміщений на рухомому об'єкті, керуючий контролер, вхід якого з'єднаний з виходом приймача, а вихід - з входом енергонезалежного зберігача інформації, систему стабілізації живлення, вхід якої з'єднаний з виходом джерела живлення та акумулятором, а вихід з'єднаний з керуючим контролером, приймачем та акумулятором, GSM радіомодем передачі інформації, входи і виходи якого з'єднані з керуючим контролером і GSM радіомодемом прийому інформації, входи і виходи якого з'єднані з персональним комп'ютером. Недоліком цієї системи є неможливість забезпечення високоточної навігації в умовах ускладнення прийому сигналів ГНСС ГЛОНАСС/GPS внаслідок ненавмисних і навмисних перешкод, в приміщеннях, в умовах Крайньої Півночі, в лісистій місцевості і т. п. В основу корисної моделі поставлено задачу підвищення точності позиціонування, підвищення потужності сигналу, забезпечення навігації в приміщенні. Поставлена задача вирішується тим, що в систему визначення місцезнаходження рухомого об'єкта, яка містить глобальну супутникову систему, вхід якої з'єднаний з виходом передавача, а вихід з'єднаний з приймачем, передавач розміщений на рухомому об'єкті, керуючий контролер, вхід якого з'єднаний з виходом приймача, а вихід - з входом енергонезалежного зберігача інформації, систему стабілізації живлення, вхід якої з'єднаний з виходом джерела живлення та акумулятором, а вихід з'єднаний з керуючим контролером, приймачем та акумулятором, GSM радіомодем передачі інформації, входи і виходи якого з'єднані з керуючим контролером і GSM радіомодемом прийому інформації, входи і виходи якого з'єднані з персональним комп'ютером, згідно з корисною моделлю, введений псевдосупутник, сигнал з якого передається на приймач. Підвищення точності позиціонування здійснюється за рахунок відсутності в наземному псевдосупутнику ефемеридних та іоносферних похибок, а також за рахунок високої потужності передачі псевдосупутником сигналу, що значно ускладнює можливість його пригнічення. В місцях, де неможливий прийом достатньої кількості сигналів СРНС, сигнал псевдосупутника дозволить визначити місцезнаходження рухомого об'єкта. Запропоноване технічне рішення пояснюється кресленням, де показана блок-схема системи визначення місцезнаходження рухомого об'єкта. Система визначення місцезнаходження рухомого об'єкта містить глобальну супутникову систему 12, вхід якої з'єднаний з виходом передавача 2, а вихід з'єднаний з приймачем 3, передавач 2 розміщений на рухомому об'єкті 1, псевдосупутник 13, вхід якого з'єднаний з виходом передавача 2, а вихід з'єднаний з приймачем 3, керуючий контролер 4, вхід якого з'єднаний з виходом приймача 3, а вихід - з входом енергонезалежного зберігача інформації 9, систему стабілізації живлення 6, вхід якої з'єднаний з виходом джерела живлення 7 та акумулятором 8, а вихід з'єднаний з керуючим контролером 4, приймачем 3 та акумулятором 8, GSM радіомодем передачі інформації 5, входи і виходи якого з'єднані з керуючим контролером 4 і GSM радіомодемом прийому інформації 10, входи і виходи якого з'єднані з персональним комп'ютером 11. Запропонована система працює наступним чином. Глобальна супутникова система 12, псевдосупутник 13 та передавач 2, передають інформацію про координати рухомого об'єкта 1 на приймач 3. Прийняту інформацію про координати рухомого об'єкта керуючий контролер 4 перетворює у формат, який далі GSM радіомодем передачі інформації 5 передає на GSM радіомодем прийому інформації 10, який прийняту інформацію передає на персональний комп'ютер 11, де дані про місцезнаходження рухомого об'єкта відображаються на екрані монітора за допомогою засобів картографічної підтримки. Живлення системи здійснюється через систему стабілізації живлення 6 за рахунок джерела живлення 7 або через акумулятор 8. Інформація про координати рухомого об'єкта 1 також зберігається в енергонезалежному зберігачі інформації 9. Таким чином, запропонована система дозволяє підвищити точність визначення координат рухомого об'єкта, забезпечити навігацію в місцях утруднення прийому сигналів СРНС, підвищити потужність сигналу за рахунок створення псевдосупутником додаткових радіонавігаційних полів. 1 UA 76139 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 Система визначення місцезнаходження рухомого об'єкта, що містить глобальну супутникову систему, вхід якої з'єднаний з виходом передавача, а вихід з'єднаний з приймачем, передавач розміщений на рухомому об'єкті, керуючий контролер, вхід якого з'єднаний з виходом приймача, а вихід - з входом енергонезалежного зберігача інформації, систему стабілізації живлення, вхід якої з'єднаний з виходом джерела живлення та акумулятором, а вихід з'єднаний з керуючим контролером, приймачем та акумулятором, GSM радіомодем передачі інформації, входи і виходи якого з'єднані з керуючим контролером і GSM радіомодемом прийому інформації, входи і виходи якого з'єднані з персональним комп'ютером, яка відрізняється тим, що в неї введено псевдосупутник, вхід якого з'єднаний з виходом передавача, а вихід з'єднаний з приймачем. Комп’ютерна верстка М. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for determination of location of a movable object
Автори англійськоюKulik Anatolii Stepanovych, Derhachov Kostiantyn Yuriiovych, Lytvynenko Tetiana Viktorivna
Назва патенту російськоюСистема определения местонахождения подвижного объекта
Автори російськоюКулик Анатолий Степанович, Дергачов Константин Юрьевич, Литвиненко Татьяна Викторовна
МПК / Мітки
МПК: G01S 3/02
Мітки: визначення, рухомого, місцезнаходження, об'єкта, система
Код посилання
<a href="https://ua.patents.su/4-76139-sistema-viznachennya-misceznakhodzhennya-rukhomogo-obehkta.html" target="_blank" rel="follow" title="База патентів України">Система визначення місцезнаходження рухомого об’єкта</a>
Система автоматичного виявлення місцезнаходження рухомого об’єкта
Номер патенту: 55408
Опубліковано: 10.12.2010
Автори: Дергачов Костянтин Юрійович, Сосницький Віталій Валерійович, Кулік Анатолій Степанович
МПК: G01S 3/02
Мітки: місцезнаходження, система, автоматичного, виявлення, об'єкта, рухомого
Формула / Реферат:
Система автоматичного виявлення місцезнаходження рухомого об'єкта, яка містить глобальну супутникову систему, вхід якої з'єднаний з виходом передавача, а вихід з'єднаний з приймачем, передавач розміщений на рухомому об'єкті, керуючий контролер, вхід якого з'єднаний з виходом приймача, а вихід з входом енергонезалежного зберігача інформації, систему стабілізації живлення, вхід якої з'єднаний з виходом джерела живлення та акумулятором, а вихід...
Система відображення місцезнаходження рухомого об`єкта
Номер патенту: 36559
Опубліковано: 27.10.2008
Автори: Бандура Іван Миколайович, Шишова Наталія Олександрівна, Дергачов Костянтин Юрійович
МПК: G01S 3/02
Мітки: система, відображення, об'єкта, місцезнаходження, рухомого
Формула / Реферат:
Система відображення місцезнаходження рухомого об'єкта, що містить передавач і приймач, які розміщені на рухомому об'єкті, джерело живлення, вихід якого послідовно через підсистему стабілізації живлення та пристрій індикації та зв'язку з персональним комп'ютером з'єднаний з центральною станцією, яка відрізняється тим, що в додатково введені глобальна супутникова система, вхід якої з'єднаний з виходом передавача, а вихід з'єднаний з приймачем,...
Система керування місцезнаходженням рухомого об’єкта
Номер патенту: 55409
Опубліковано: 10.12.2010
Автори: Гуш Роман Миколайович, Кулік Анатолій Степанович, Кописов Олег Едуардович, Дергачов Костянтин Юрійович
МПК: G08G 1/0968
Мітки: місцезнаходженням, керування, система, рухомого, об'єкта
Формула / Реферат:
Система керування місцезнаходженням рухомого об'єкта, що містить глобальну супутникову систему, перший вхід якої з'єднаний з виходом передавача, а перший вихід з'єднаний з приймачем, керуючий контролер, вхід якого з'єднаний з приймачем, а виходи з'єднані з енергонезалежним зберігачем інформації та пристроєм індикації та зв'язку з персональним комп'ютером, джерело живлення, вихід якого через підсистему стабілізації живлення з'єднаний з...
Система визначення маршруту руху транспортного об’єкта
Номер патенту: 45148
Опубліковано: 26.10.2009
Автори: Бандура Іван Миколайович, Дергачев Костянтин Юрійович, Дорош Ігор Сергійович
МПК: G01S 3/02
Мітки: маршруту, визначення, система, транспортного, руху, об'єкта
Формула / Реферат:
Система визначення маршруту руху транспортного об'єкта, яка містить приймач, зв'язаний із глобальною супутниковою системою та керуючим контролером, джерело живлення, вихід якого послідовно через підсистему стабілізації живлення та пристрій індикації з персональним комп'ютером з'єднаний з центральною станцією, вбудовані акумулятори, входи і виходи яких з'єднані з підсистемою стабілізації живлення, керуючий контролер, входи і виходи якого...
Автоматизована система побудови оптимального маршруту руху транспортного агрегату
Номер патенту: 53723
Опубліковано: 11.10.2010
Автори: Кулік Анатолій Степанович, Морозов Володимир Володимирович, Грібков Антон Євгенович, Дергачов Костянтин Юрійович
МПК: G01S 3/02
Мітки: транспортного, автоматизована, система, побудови, агрегату, маршруту, руху, оптимального
Формула / Реферат:
Автоматизована система побудови оптимального маршруту руху транспортного агрегату, що містить приймач, приєднаний до рухомого об'єкта, зв'язаний із глобальною супутниковою системою та керуючим контролером, джерело живлення, вбудований акумулятор, виходи яких з'єднані з підсистемою стабілізації живлення, виходи якої з'єднані з приймачем та керуючим контролером, входи і виходи якого з'єднані з оперативною пам'яттю та енергонезалежним...
Попередній патент: Автоматизована система контролю
Наступний патент: Система управління дозуючим пристроєм
Випадковий патент: Спосіб попередження розвитку катаракти у хворих на кератит