Система для моніторингу групування супутників системи позиціонування
Формула / Реферат
1. Система моніторингу для моніторингу сигналів позиціонування, що випромінюються угрупуванням (2) супутників, що належать системі позиціонування, причому згадана система (1) моніторингу містить:
щонайменше один супутник (S2) моніторингу, що містить щонайменше наступні бортові засоби:
щонайменше один приймач (9), здатний напряму приймати сигнали позиціонування, що випромінюються супутниками (S1) згаданого групування (2) супутників; і
щонайменше один випромінювач (13), здатний випромінювати в напрямку Землі (Т) дані про цілісність, що вказують, у випадку наявності, супутник(и) згаданого групування (2) супутників, сигнали позиціонування якого (яких) помилкові;
щонайменше один центр (3) керування, розташований на Землі, що керує згаданими супутниками (S2) моніторингу, і містить засіб (4), здатний приймати дані про цілісність, що випромінюється такими супутниками (S2) моніторингу; і
щонайменше один центр (5) поширення повідомлень про цілісність, що розташований на Землі (Т), і містить:
засіб (6) для прийому даних про цілісність від супутника (S2) моніторингу, що передаються згаданим центром (3) керування;
засіб (7) для визначення з таких даних про цілісність повідомлень про цілісність, що стосуються супутників (S1) згаданого групування (2) супутників системи позиціонування; і
засіб (8) для випромінювання таких повідомлень про цілісність користувачам,
при цьому згаданий супутник (S2) моніторингу розміщений на орбіті (O2) на нижчій висоті, ніж супутники (S1) згаданого групування (2) супутників, так щоб мати можливість приймати сигнали позиціонування, що випромінюються такими супутниками (S1) у напрямку до Землі (Е), і згаданий супутник (S2) моніторингу додатково містить щонайменше один блок (11) обробки, що формується так, щоб перевіряти цілісність прийнятих сигналів позиціонування, з використанням інформації позиціонування, незалежної від таких сигналів позиціонування, щоб визначити, у випадку наявності, супутники (S1), що випромінюють помилкові сигнали позиціонування, і щоб формувати відповідні дані про цілісність.
2. Система моніторингу за п. 1, яка містить множину супутників (S2) моніторингу.
3. Система моніторингу за п. 1, в якій кожен супутник (S2) моніторингу додатково містить бортовий допоміжний засіб (19), що дозволяє визначити першу позицію в просторі згаданого супутника (S2) моніторингу, без використання згаданих сигналів позиціонування, що випромінюються супутниками (S1) згаданого групування (2) супутників, і згаданий блок (11) обробки містить:
перший засіб (19) для обчислення щонайменше однієї другої позиції, за допомогою згаданих сигналів позиціонування, що приймаються від супутників (S1) групування (2) супутників;
другий засіб (21) для порівняння між собою згаданих першої і другої позиції; і
третій засіб (21) для формування висновку на основі цього, у випадку наявності, про існування помилкових сигналів позиціонування.
4. Система моніторингу за п. 3, в якій:
згаданий перший засіб (19) формується таким чином, щоб обчислювати множину других позицій, кожна зі згаданих других позицій обчислюється за допомогою сигналів позиціонування, що приймаються від підгрупи супутників згаданого групування (2) супутників, кожна згадана підгрупа містить однакову попередньо визначену першу кількість супутників, і будь-які дві підгрупи в будь-який момент загалом мають не більше другої попередньо визначеної кількості супутників;
згаданий другий засіб (21) формується таким чином, щоб порівнювати кожну з цих других позицій зі згаданою першою позицією; і
згаданий третій засіб (21) формується таким чином, щоб визначати, у випадку наявності, супутник(и), сигнали позиціонування якого (яких) є помилковими, з використанням результатів порівняння, реалізованого згаданим другим засобом (21), і склад згаданих підгруп.
5. Система моніторингу за п. 1, в якій кожен супутник (S2) моніторингу додатково містить одну приймальну антену (10), зв'язану зі згаданим приймачем (9), позиціоновану так, щоб уникнути багатопроменевого поширення, і оточену одним електромагнітним захисним екраном для видалення небажаних режимів поширення.
6. Система моніторингу за п. 1, в якій кожен супутник (S2) моніторингу розміщений на орбіті (O2), яка має висоту більшу, ніж висота щільних шарів іоносфери.
7. Система моніторингу за п. 1, в якій кожен супутник (S2) моніторингу розміщений на орбіті (O2), площина якої відрізняється від площин орбіт (О1) супутників (S1) згаданого групування (2) супутників.
8. Система моніторингу за п. 1, в якій згадані центри керування і поширення розташовані в одному місці і належать єдиному центру адміністрування.
9. Система моніторингу за п. 1, в якій згаданий центр (3) керування додатково містить:
засіб (24) для віддаленого керування кожним супутником (S2) моніторингу; і
засіб (25) для обчислення параметрів орбіт кожного супутника (S2) моніторингу і для оновлення блоків (11) обробки на борту кожного супутника (S2) моніторингу.
10. Система моніторингу за п. 1, в якій згаданий центр (5) поширення додатково містить засіб (28) кодування для кодування повідомлень про цілісність перед їх відправкою користувачам.
Текст
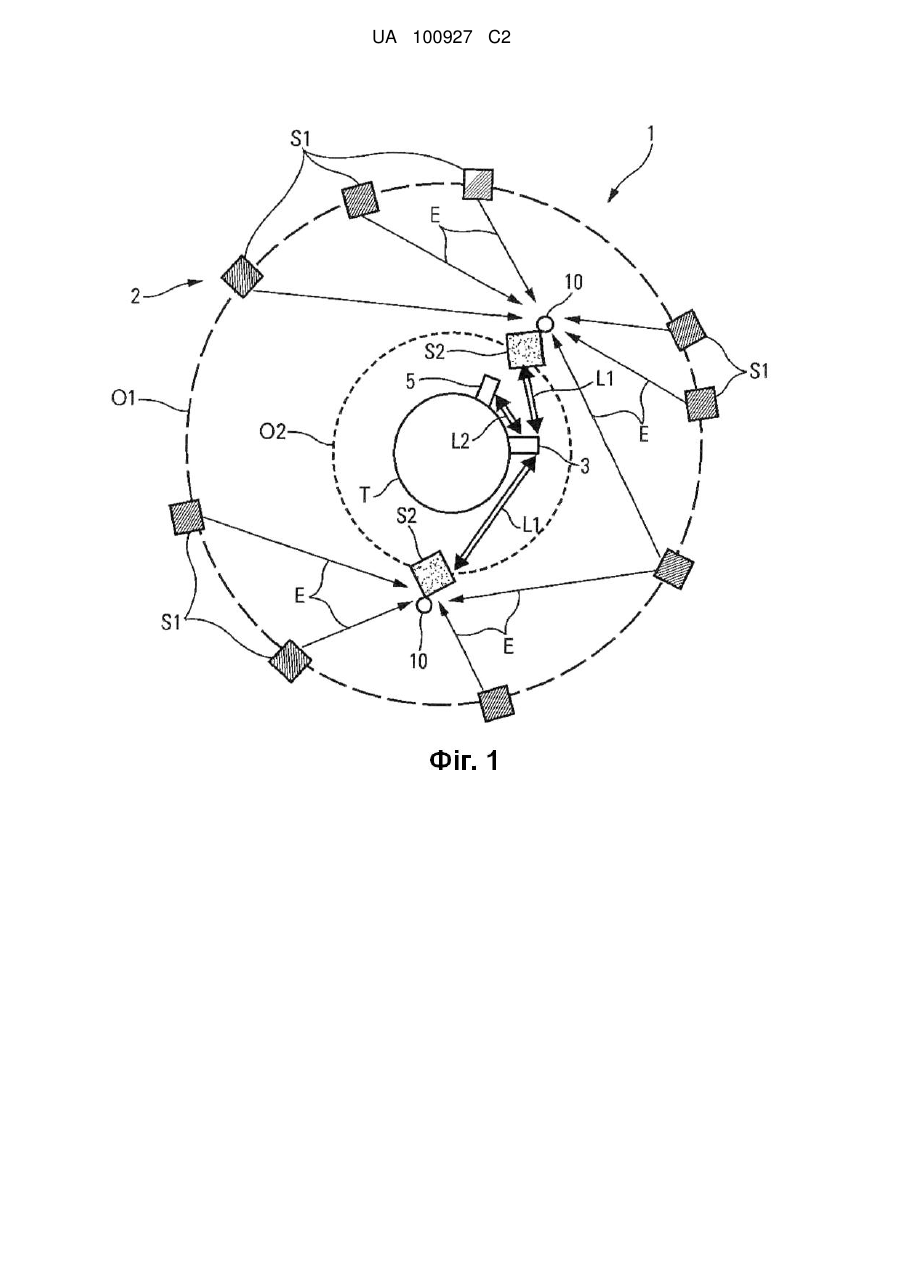
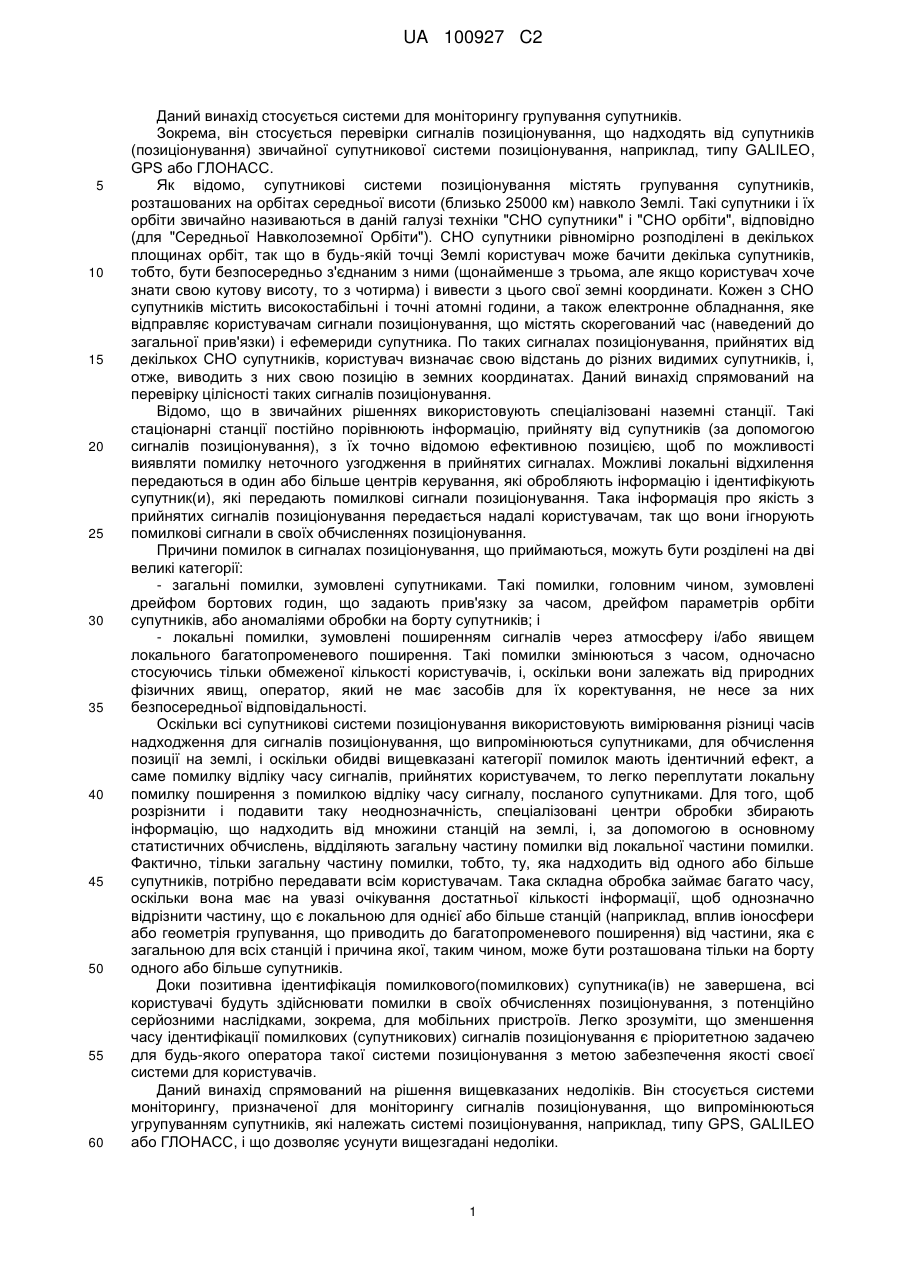
Реферат: Винахід стосується системи (1) моніторингу, яка містить щонайменше один супутник (S2) моніторингу, розміщений на орбіті (O2) на меншій висоті, ніж супутники (S1) групування (2) супутників, так, щоб мати можливість приймати сигнали позиціонування, що випромінюються в напрямку Землі (Т) згаданими супутниками (S1), і яка містить блок (11) обробки, призначений для перевірки цілісності згаданих прийнятих сигналів позиціонування, з використанням інформації про позицію, яка для цього відділена від згаданих сигналів. UA 100927 C2 (12) UA 100927 C2 UA 100927 C2 5 10 15 20 25 30 35 40 45 50 55 60 Даний винахід стосується системи для моніторингу групування супутників. Зокрема, він стосується перевірки сигналів позиціонування, що надходять від супутників (позиціонування) звичайної супутникової системи позиціонування, наприклад, типу GALILEO, GPS або ГЛОНАСС. Як відомо, супутникові системи позиціонування містять групування супутників, розташованих на орбітах середньої висоти (близько 25000 км) навколо Землі. Такі супутники і їх орбіти звичайно називаються в даній галузі техніки "СНО супутники" і "СНО орбіти", відповідно (для "Середньої Навколоземної Орбіти"). СНО супутники рівномірно розподілені в декількох площинах орбіт, так що в будь-якій точці Землі користувач може бачити декілька супутників, тобто, бути безпосередньо з'єднаним з ними (щонайменше з трьома, але якщо користувач хоче знати свою кутову висоту, то з чотирма) і вивести з цього свої земні координати. Кожен з СНО супутників містить високостабільні і точні атомні години, а також електронне обладнання, яке відправляє користувачам сигнали позиціонування, що містять скорегований час (наведений до загальної прив'язки) і ефемериди супутника. По таких сигналах позиціонування, прийнятих від декількох СНО супутників, користувач визначає свою відстань до різних видимих супутників, і, отже, виводить з них свою позицію в земних координатах. Даний винахід спрямований на перевірку цілісності таких сигналів позиціонування. Відомо, що в звичайних рішеннях використовують спеціалізовані наземні станції. Такі стаціонарні станції постійно порівнюють інформацію, прийняту від супутників (за допомогою сигналів позиціонування), з їх точно відомою ефективною позицією, щоб по можливості виявляти помилку неточного узгодження в прийнятих сигналах. Можливі локальні відхилення передаються в один або більше центрів керування, які обробляють інформацію і ідентифікують супутник(и), які передають помилкові сигнали позиціонування. Така інформація про якість з прийнятих сигналів позиціонування передається надалі користувачам, так що вони ігнорують помилкові сигнали в своїх обчисленнях позиціонування. Причини помилок в сигналах позиціонування, що приймаються, можуть бути розділені на дві великі категорії: - загальні помилки, зумовлені супутниками. Такі помилки, головним чином, зумовлені дрейфом бортових годин, що задають прив'язку за часом, дрейфом параметрів орбіти супутників, або аномаліями обробки на борту супутників; і - локальні помилки, зумовлені поширенням сигналів через атмосферу і/або явищем локального багатопроменевого поширення. Такі помилки змінюються з часом, одночасно стосуючись тільки обмеженої кількості користувачів, і, оскільки вони залежать від природних фізичних явищ, оператор, який не має засобів для їх коректування, не несе за них безпосередньої відповідальності. Оскільки всі супутникові системи позиціонування використовують вимірювання різниці часів надходження для сигналів позиціонування, що випромінюються супутниками, для обчислення позиції на землі, і оскільки обидві вищевказані категорії помилок мають ідентичний ефект, а саме помилку відліку часу сигналів, прийнятих користувачем, то легко переплутати локальну помилку поширення з помилкою відліку часу сигналу, посланого супутниками. Для того, щоб розрізнити і подавити таку неоднозначність, спеціалізовані центри обробки збирають інформацію, що надходить від множини станцій на землі, і, за допомогою в основному статистичних обчислень, відділяють загальну частину помилки від локальної частини помилки. Фактично, тільки загальну частину помилки, тобто, ту, яка надходить від одного або більше супутників, потрібно передавати всім користувачам. Така складна обробка займає багато часу, оскільки вона має на увазі очікування достатньої кількості інформації, щоб однозначно відрізнити частину, що є локальною для однієї або більше станцій (наприклад, вплив іоносфери або геометрія групування, що приводить до багатопроменевого поширення) від частини, яка є загальною для всіх станцій і причина якої, таким чином, може бути розташована тільки на борту одного або більше супутників. Доки позитивна ідентифікація помилкового(помилкових) супутника(ів) не завершена, всі користувачі будуть здійснювати помилки в своїх обчисленнях позиціонування, з потенційно серйозними наслідками, зокрема, для мобільних пристроїв. Легко зрозуміти, що зменшення часу ідентифікації помилкових (супутникових) сигналів позиціонування є пріоритетною задачею для будь-якого оператора такої системи позиціонування з метою забезпечення якості своєї системи для користувачів. Даний винахід спрямований на рішення вищевказаних недоліків. Він стосується системи моніторингу, призначеної для моніторингу сигналів позиціонування, що випромінюються угрупуванням супутників, які належать системі позиціонування, наприклад, типу GPS, GALILEO або ГЛОНАСС, і що дозволяє усунути вищезгадані недоліки. 1 UA 100927 C2 5 10 15 20 25 30 35 40 45 50 55 60 З цією метою, відповідно до даного винаходу, згадана система моніторингу відрізняється тим, що вона містить: - щонайменше один супутник моніторингу, позиціонований на орбіті з висотою нижчою, ніж висота орбіти супутників згаданого групування супутників, так, щоб приймати сигнали позиціонування, що випромінюються такими супутниками в напрямку Землі, і які містять наступні бортові засоби: - щонайменше один приймач, здатний напряму приймати сигнали позиціонування, що випромінюються супутниками згаданого групування супутників; - щонайменше один блок обробки, сформований таким чином, щоб перевіряти цілісність згаданих прийнятих сигналів позиціонування, використовуючи інформацію позиціонування, що є незалежною від цих сигналів позиціонування, і щоб визначати випадки, в яких супутник(и) випромінюють помилкові сигнали позиціонування; і - щонайменше один випромінювач, здатний випромінювати в напрямку Землі дані про цілісність, що вказує, у випадку наявності, супутник(и) згаданого групування супутників з помилковими сигналами позиціонування; - щонайменше один центр керування, розташований на Землі, для керування згаданим супутником моніторингу, що визначає його орбіту, і містить засіб, здатний приймати дані про цілісність, що випромінюється таким супутником моніторингу; і - щонайменше один центр поширення повідомлень про цілісність, що розташований на Землі, і містить: - засіб для прийому даних про цілісність від супутника моніторингу, що передаються згаданим центром керування; - засіб для визначення з таких даних про цілісність повідомлень про цілісність, що стосуються супутників згаданого групування супутників системи позиціонування; і - засіб для випромінювання таких повідомлень про цілісність користувачам. Таким чином, завдяки цьому винаходу, замість використання стаціонарних станцій, встановлених на землі, для моніторингу групування супутників системи позиціонування, система моніторингу використовує щонайменше один супутник моніторингу, розташований на нижчій висоті, ніж висота супутників згаданого групування супутників, таким чином, щоб мати можливість приймати сигнали позиціонування, що випромінюються останніми (і призначені користувачам системи позиціонування), але розміщений на такій орбіті, щоб запобігти локальним помилкам, що виникає, як описано вище, в результаті, зокрема, явища локального багатопроменевого поширення, або в результаті затримок поширення. Отже, одержана надзвичайно надійна система моніторингу, що дозволяє, зокрема, автономно і швидко виявляти, при цьому без неоднозначності, помилкові сигнали позиціонування, які випромінюються одним або більше супутниками системи позиціонування, що піддається моніторингу, яка використовує з цією метою інформацію позиціонування, що є незалежною від згаданих сигналів позиціонування. У переважному варіанті здійснення, згадана система моніторингу містить множину супутників моніторингу, таких як згадані тут вище, що розміщені на нижчих орбітах, ніж супутники групування, і реалізовують вищевказані функції. Переважно, кожен супутник моніторингу додатково містить бортовий допоміжний засіб, що дозволяє визначати (за допомогою інформації, яка приймається від згаданого центра керування) першу позицію в просторі згаданого супутника моніторингу, без використання згаданих сигналів позиціонування, що випромінюються супутниками групування супутників, і згаданий блок обробки містить: - перший засіб для обчислення щонайменше однієї другої позиції, за допомогою згаданих сигналів позиціонування, що приймаються від супутників групування супутників; - другий засіб для порівняння між собою згаданих першої і другої позицій; і - третій засіб для формування висновку на основі цього, у випадку наявності, про існування помилкових сигналів позиціонування. Більше того, в переважному варіанті здійснення: - згаданий перший засіб формується таким чином, щоб обчислювати множину других позицій, кожна зі згаданих других позицій обчислюється з використанням сигналів позиціонування, що приймаються від підгрупи супутників згаданого групування супутників, кожна згадана підгрупа містить однакову попередньо визначену першу кількість супутників (наприклад, чотири супутники), і будь-які дві підгрупи в будь-який момент мають загалом не більше другої попередньо визначеної кількості супутників (наприклад, два супутники): - згаданий другий засіб формується таким чином, щоб порівнювати кожну з цих других позицій зі згаданою першою позицією; і 2 UA 100927 C2 5 10 15 20 25 30 35 40 45 50 55 - згаданий третій засіб формується таким чином, щоб визначати супутник(и), сигнали позиціонування якого(яких) є помилковими, за допомогою результатів порівняння, реалізованого згаданим другим засобом, і склад згаданих підгруп. Більше того, кожен супутник моніторингу додатково містить одну приймальну антену, зв'язану зі згаданим приймачем, позиціоновану таким чином, щоб уникнути багатопроменевого поширення, і оточену одним електромагнітним захисним екраном для видалення небажаних режимів поширення (за допомогою відображення або дифракції сигналів позиціонування на структурі згаданих супутників моніторингу), що дозволяє видалити найбільш часті явища, здатні порушити прийом сигналів антеною. У переважному варіанті здійснення, згаданий(і) супутник(и) моніторингу розміщений(і) на орбітах: - що мають висоти більші, ніж висота щільних шарів іоносфери, що дозволяє уникнути виникнення іоносферних затримок в результаті проходження сигналів позиціонування через щільні шари іоносфери; і/або - площини яких відрізняються від площин орбіт згаданих супутників групування супутників, щоб максимізувати точність виявлення помилок. Більше того, в переважному варіанті здійснення, згадані центри керування і поширення розташовані в одному місці і належать єдиному центру адміністрування. Додатково, переважно, згаданий центр керування додатково включає: - засіб для віддаленого керування кожним зі згаданих супутників моніторингу; і засіб для обчислення параметрів орбіт згаданого(згаданих) супутника(супутників) для моніторингу і оновлення блоків обробки на борту такого(таких) супутника(супутників) моніторингу. Більше того, переважно, згаданий центр поширення додатково містить засіб кодування для кодування повідомлень про цілісність перед їх відправкою, щоб обмежити використання такої інформації визначеним колом користувачів (наприклад, що мають підписаний договір), яким наданий відповідний засіб декодування. Фігури прикладених креслень краще пояснять, як цей винахід може бути реалізований. На цих фігурах однакові умовні позначення стосуються однакових компонентів. На Фіг. 1 схематично проілюстрована архітектура системи моніторингу відповідно до цього винаходу. На Фіг. 2 схематично показані основні засоби, розташовані на борту супутника моніторингу, що належить системі моніторингу відповідно до цього винаходу. На Фіг. З представлена блок-схема блока обробки для супутника моніторингу відповідно до цього винаходу. На Фіг. 4 і 5 схематично показані основні засоби, відповідно, центра керування і центра поширення. Система 1 моніторингу відповідно до цього винаходу, і показана відповідно до схематичної архітектури на Фіг. 1, призначена для моніторингу звичайної супутникової системи позиціонування, наприклад, типу GALILEO, GPS, ГЛОНАСС, а також поліпшуючих супутників, таких як EGNOSS. На Фіг. 1 просто представлене групування 2 супутників такої системи позиціонування. Таке групування 2 супутників містить множину супутників S1, розміщених на орбіті навколо Землі Т, на орбіті 01, що має, як правило, середню висоту (близько 20000-25000 км). Система 1 моніторингу відповідно до цього винаходу, зокрема, спрямована на моніторинг сигналів позиціонування, що випромінюються супутниками S1 такого групування 2 супутників системи позиціонування. Як правило, відомо, що такі сигнали позиціонування використовуються користувачами системи позиціонування, щоб визначати більш точно їх позицію, і, за бажанням, їх швидкість. Відповідно до винаходу, згадана система 1 моніторингу містить для цієї мети: - щонайменше один, але, переважно, множину супутників S2 моніторингу. Такі супутники S2 моніторингу розташовані на орбіті навколо землі Т, на орбіті O2, висота якої, наприклад, знаходиться в діапазоні від 2000 до 3000 метрів, є нижчою, ніж висота (близько 20000-25000 метрів) орбіти супутників S1 згаданого групування 2 супутників, з тим, щоб приймати, як показано стрілками Е, сигнали позиціонування, що випромінюються великою кількістю супутників S1 на Землю Т; - щонайменше один центр 3 керування, розташований на Землі Т, що керує згаданими супутниками S2 моніторингу, і містить засіб 4, здатний приймати дані про цілісність, які випромінюється такими супутниками S2 моніторингу. Лінії L1 передачі даних між центром 3 3 UA 100927 C2 5 10 15 20 25 30 35 40 45 50 55 60 керування і супутниками S2 моніторингу є лініями зв'язками звичайного типу, основаними на електромагнітних хвилях; і - щонайменше один центр 5 поширення повідомлень про цілісність, що розташований на Землі Т, і містить, як показано на Фіг. 5: - засіб 6 для прийому даних про цілісність, що випромінюються згаданими супутниками S2 моніторингу, і передаються згаданим центром 3 керування; - засіб 7 для визначення з таких даних про цілісність повідомлень про цілісність, яка стосуються супутників S1 згаданого групування 2 супутників системи позиціонування. Такі повідомлення про цілісність чітко ідентифікують, у випадку наявності, супутник(и) S2, що випромінюють помилкові сигнали позиціонування; і - засіб 8 для випромінювання таких повідомлень про цілісність користувачам. Користувачі системи позиціонування можуть потім ігнорувати сигнали позиціонування, прийняті від супутників S1, ідентифікованих в повідомленнях про цілісність, і використовувати тільки цілісні сигнали супутників S1. Крім того, відповідно до винаходу, кожен з супутників S2 моніторингу системи 1 містить щонайменше наступні бортові засоби, як показано на Фіг. 2: - щонайменше один приймач 9, здатний приймати, за допомогою зв'язаної антени 10, сигнали позиціонування, що випромінюються супутниками S1 згаданого групування 2 супутників; - щонайменше один блок 11 обробки, який формується таким чином, щоб перевіряти цілісність згаданих сигналів позиціонування, що приймаються за допомогою лінії 12 зв'язку, з використанням інформації позиціонування (буде описано нижче), що є незалежною від таких сигналів позиціонування. Додатково, такий блок 11 обробки формується так, щоб визначати, у випадку наявності, супутник(и) S1, що випромінюють помилкові сигнали позиціонування; і - щонайменше один випромінювач 13, здатний випромінювати до Землі Т, як показано лінією L1 зв'язку, за допомогою зв'язаної антени 14, дані про цілісність, прийняту (по лінії 15 зв'язку) від блока 11 обробки, і вказуючих, у випадку наявності, супутник(и) S1 згаданого групування 2 супутників, сигнали позиціонування якого(яких) є помилковими. Система 1 моніторингу, таким чином, здатна незалежно перевіряти цілісність системи позиціонування, що піддається моніторингу, і має можливість передавання інформації, що стосується якості сигналів позиціонування, що випромінюються супутниками S1, зокрема, користувачам згаданої системи позиціонування. Користь від використання супутників S2 моніторингу замість стаціонарних земних станцій, полягає, зокрема, в тому, що сигнали позиціонування, прийняті від таких супутників S2 моніторингу, позбавлені будь-яких локальних помилок, таких, як, наприклад, багатопроменеве поширення. Через супутники S2 моніторингу такого типу, система 1 моніторингу, таким чином, може виконувати без неоднозначності швидке автономне виявлення помилкових сигналів позиціонування, що випромінюються одним або більше супутниками S1 групування 2 супутників системи позиціонування. У приватному варіанті здійснення, згадані супутники S2 моніторингу розміщені на орбітах O2: - що мають висоти більші, ніж висота щільних шарів іоносфери, що дозволяє уникнути виникнення іоносферних затримок в результаті проходження сигналів позиціонування через щільні шари іоносфери; і/або - площини яких відрізняються від площин орбіт О2 згаданих супутників S1, з тим, щоб максимізувати точність виявлення помилок. Додатково, в переважному варіанті здійснення, кожен супутник S2 моніторингу має наступне бортове обладнання, показане на Фіг. 2, деяке з якого раніше згадувалося: - приймальна антена 10 для сигналів позиціонування. Така антена 10 позиціонована таким чином, щоб не було можливості багатопроменевого поширення через відображення або дифракцію сигналів позиціонування на структурі супутника моніторингу S2. З цією метою, така антена 10 може також забезпечуватися, якщо є необхідність, звичайним електромагнітним захисним екраном (не показаний), що призначений для видалення небажаних режимів поширення, і оточує таку антену 10; - один або більше приймачів 9, що задають позицію антени 10 супутника S2 моніторингу відносно групування 2 супутників системи позиціонування, а також інформацію про час; - високостабільні годинники 16, що забезпечують прив'язку за часом, незалежну від групування 2 супутників; - один або більше блоків 11 обробки для обробки інформації, що передається через бортові приймачі 9 і годинники 16 (по лініях 12 і 17 зв'язку) і формуються так, щоб виявляти, чи 4 UA 100927 C2 5 10 15 20 25 30 35 40 45 50 55 відправляє один або більше супутників S1 позиціонування помилкові сигнали позиціонування, як описано нижче; - випромінювач 13 і його антена 14, що працюють на частотах, відмінних від частот сигналів позиціонування, і передаючі результати обробки, реалізованої блоком (блоками) 11 обробки; і - набір 18 звичайних елементів і функціональних можливостей будь-якого супутника, призначених, зокрема, для: - керування висотою і коректування орбіти О2 супутника S2 моніторингу; - подачі необхідної електричної енергії; і - забезпечення прийнятного теплового режиму для бортового обладнання. У рамках об'єму даного винаходу, бортовий блок (бортові блоки) 11 обробки супутників S2 моніторингу здійснюють операції по адмініструванню для супутників S2, а також операції, характерні для місії моніторингу. Зокрема, для виконання останніх операцій, бортовий блок 11 обробки містить наступні засоби, показані на Фіг. 3: - засіб 19 для обчислення тримірної позиції і швидкості супутника, що піддається моніторингу S1 з сигналів позиціонування, що приймаються від групування 2 супутників. Такі сигнали використовуються в рівномірно розподілених підгрупах. Кожна підгрупа містить задану кількість супутників, наприклад, 4 супутники, не більшу, ніж задана кількість яких (наприклад, два) є загальною для двох підгруп; - засіб 20 для адміністрування поширенням параметрів орбіти супутника і бортового часу. Такі параметри спочатку завантажуються з центра 3 керування; - засіб 21 для генерування даних про цілісність, що ідентифікують, у випадку наявності, супутник(и) S1, сигнали позиціонування якого(яких) є помилковими. Такі дані про цілісність повинні передаватися в центр 3 керування і користувачам системи позиціонування; і - засіб 22 для моніторингу робочого стану супутника S2 моніторингу і, зокрема, узгодженість між обчисленою тримірною позицією і позицією, що поширюється на борту, щоб мати можливість виявити аномалію бортового корисного навантаження. Для цієї мети може бути використана характерна властивість супутника S2 моніторингу, яка полягає в тому, що не може існувати декілька істинних тримірних позицій для одного супутника S2, оскільки останній містить єдину приймальну антену 10. Така умова задовольняється з ще більшою точністю, оскільки центр тяжіння супутника S2 моніторингу розташований близько до позиції приймальної антени 10. така умова задовольняється для невеликого супутника, розмір якого, як правило, менший одного метра, і кутова висота якого, як відомо, знаходиться в межах декількох градусів. У випадку, коли супутник S2 має більшу відстань між його центром тяжіння і його приймальною антеною 10, засіб 22 може містити обчислювальний засіб для виконання коректування як функції висоти супутника S2, з метою підтримати відповідність між обчисленою позицією центра тяжіння, що знаходиться на орбіті О2, і позицією приймальної антени 10, що забезпечує обчислену тримірну позицію. Крім того, відповідно до винаходу, згаданий засіб 19 порівнює обчислені 3D позиції для кожної підгрупи, з незалежною позицією, що оцінюється з параметрів орбіти супутника S2 моніторингу, прийнятих від згаданого центра 3 керування так, щоб визначити чи є відхилення (що перевищує попередньо визначене значення). У випадку відсутності суттєвого відхилення, блок 11 обробки приходить до наступного висновку: - з одного боку, незалежна позиція, обчислена з використанням параметрів орбіти, коректна; і - з іншого боку, всі сигнали позиціонування, що випромінюються супутниками підгрупи, яка розглядається, є надійними, оскільки в такому випадку статистично неможлива наявність двох компенсуючих помилок. І навпаки, якщо виявлене суттєве відхилення, згаданим засобом 19 здійснюються регресивні обчислення для визначення того, який(які) з супутників S1 передає(передають) помилкові сигнали. Принципом обчислень є той факт, що, якщо одна з підгруп показує суттєве відхилення відносно обчисленої незалежної позиції, то така підгрупа містить щонайменше один супутник S1 з помилковими сигналами позиціонування. Таким чином, здійснюючи серію замін супутників S1 такої підгрупи супутниками іншої підгрупи, згаданий засіб 19 здатний оперативно ізолювати супутник(и) S1, що є джерелом виявленої (виявлених) помилки (помилок). У спрощеному (не показано) варіанті здійснення, центр 3 керування і центр 5 поширення розташовані в одному місцеположенні на Землі Т і належать єдиному центру адміністрування. Згаданий центр 3 керування, зокрема, містить, як показано на Фіг. 4: - згаданий засіб 4 для прийому даних про цілісність, що випромінюються супутниками S2 моніторингу; 5 UA 100927 C2 5 10 15 - засіб 24 для віддаленого керування згаданими супутниками S2 моніторингу за допомогою зв'язку S1; - засіб 25 для обчислення параметрів орбіт згаданих супутників S2 моніторингу і для оновлення блоків 11 обробки на борту таких супутників S2 моніторингу; і - засіб 26 для випромінювання даних про цілісність до центра 5 поширення, що проілюстровано за допомогою лінії L2 зв'язку на Фіг. 1. Згаданий центр 5 поширення також містить, в доповнення до вищевказаних засобів 6, 7 і 8, засіб 28 кодування для кодування повідомлень про цілісність (що генеруються засобом 7) перед їх відправкою (через засіб 8) користувачам, так що тільки авторизовані або користувачі, що заплатили внесок, можуть декодувати інформацію про цілісність. Поширення ключів розшифрування може здійснюватися за допомогою звичайних захищених засобів. Відправка інформації про цілісність (користувачам) може відбуватися наступними чином: - через Інтернет; або - через радіоелектричні хвилі; або - через існуючий засіб або спеціальний засіб (радіо або телебачення, супутники зв'язку, EGNOSS і т. д.). ФОРМУЛА ВИНАХОДУ 20 25 30 35 40 45 50 55 60 1. Система моніторингу для моніторингу сигналів позиціонування, що випромінюються угрупуванням (2) супутників, що належать системі позиціонування, причому згадана система (1) моніторингу містить: щонайменше один супутник (S2) моніторингу, що містить щонайменше наступні бортові засоби: щонайменше один приймач (9), здатний напряму приймати сигнали позиціонування, що випромінюються супутниками (S1) згаданого групування (2) супутників; і щонайменше один випромінювач (13), здатний випромінювати в напрямку Землі (Т) дані про цілісність, що вказують, у випадку наявності, супутник(и) згаданого групування (2) супутників, сигнали позиціонування якого (яких) помилкові; щонайменше один центр (3) керування, розташований на Землі, що керує згаданими супутниками (S2) моніторингу, і містить засіб (4), здатний приймати дані про цілісність, що випромінюється такими супутниками (S2) моніторингу; і щонайменше один центр (5) поширення повідомлень про цілісність, що розташований на Землі (Т), і містить: засіб (6) для прийому даних про цілісність від супутника (S2) моніторингу, що передаються згаданим центром (3) керування; засіб (7) для визначення з таких даних про цілісність повідомлень про цілісність, що стосуються супутників (S1) згаданого групування (2) супутників системи позиціонування; і засіб (8) для випромінювання таких повідомлень про цілісність користувачам, при цьому згаданий супутник (S2) моніторингу розміщений на орбіті (O2) на нижчій висоті, ніж супутники (S1) згаданого групування (2) супутників, так щоб мати можливість приймати сигнали позиціонування, що випромінюються такими супутниками (S1) у напрямку до Землі (Е), і згаданий супутник (S2) моніторингу додатково містить щонайменше один блок (11) обробки, що формується так, щоб перевіряти цілісність прийнятих сигналів позиціонування, з використанням інформації позиціонування, незалежної від таких сигналів позиціонування, щоб визначити, у випадку наявності, супутники (S1), що випромінюють помилкові сигнали позиціонування, і щоб формувати відповідні дані про цілісність. 2. Система моніторингу за п. 1, яка містить множину супутників (S2) моніторингу. 3. Система моніторингу за п. 1, в якій кожен супутник (S2) моніторингу додатково містить бортовий допоміжний засіб (19), що дозволяє визначити першу позицію в просторі згаданого супутника (S2) моніторингу, без використання згаданих сигналів позиціонування, що випромінюються супутниками (S1) згаданого групування (2) супутників, і згаданий блок (11) обробки містить: перший засіб (19) для обчислення щонайменше однієї другої позиції, за допомогою згаданих сигналів позиціонування, що приймаються від супутників (S1) групування (2) супутників; другий засіб (21) для порівняння між собою згаданих першої і другої позиції; і третій засіб (21) для формування висновку на основі цього, у випадку наявності, про існування помилкових сигналів позиціонування. 4. Система моніторингу за п. 3, в якій: 6 UA 100927 C2 5 10 15 20 25 згаданий перший засіб (19) формується таким чином, щоб обчислювати множину других позицій, кожна зі згаданих других позицій обчислюється за допомогою сигналів позиціонування, що приймаються від підгрупи супутників згаданого групування (2) супутників, кожна згадана підгрупа містить однакову попередньо визначену першу кількість супутників, і будь-які дві підгрупи в будь-який момент загалом мають не більше другої попередньо визначеної кількості супутників; згаданий другий засіб (21) формується таким чином, щоб порівнювати кожну з цих других позицій зі згаданою першою позицією; і згаданий третій засіб (21) формується таким чином, щоб визначати, у випадку наявності, супутник(и), сигнали позиціонування якого (яких) є помилковими, з використанням результатів порівняння, реалізованого згаданим другим засобом (21), і склад згаданих підгруп. 5. Система моніторингу за п. 1, в якій кожен супутник (S2) моніторингу додатково містить одну приймальну антену (10), зв'язану зі згаданим приймачем (9), позиціоновану так, щоб уникнути багатопроменевого поширення, і оточену одним електромагнітним захисним екраном для видалення небажаних режимів поширення. 6. Система моніторингу за п. 1, в якій кожен супутник (S2) моніторингу розміщений на орбіті (O2), яка має висоту більшу, ніж висота щільних шарів іоносфери. 7. Система моніторингу за п. 1, в якій кожен супутник (S2) моніторингу розміщений на орбіті (O2), площина якої відрізняється від площин орбіт (О1) супутників (S1) згаданого групування (2) супутників. 8. Система моніторингу за п. 1, в якій згадані центри керування і поширення розташовані в одному місці і належать єдиному центру адміністрування. 9. Система моніторингу за п. 1, в якій згаданий центр (3) керування додатково містить: засіб (24) для віддаленого керування кожним супутником (S2) моніторингу; і засіб (25) для обчислення параметрів орбіт кожного супутника (S2) моніторингу і для оновлення блоків (11) обробки на борту кожного супутника (S2) моніторингу. 10. Система моніторингу за п. 1, в якій згаданий центр (5) поширення додатково містить засіб (28) кодування для кодування повідомлень про цілісність перед їх відправкою користувачам. 7 UA 100927 C2 8 UA 100927 C2 Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 9
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for monitoring of grouping of positioning system satellites
Автори англійськоюLaine, Robert
Назва патенту російськоюСистема для мониторинга группирования спутников системы позиционирования
Автори російськоюЛене Робер
МПК / Мітки
МПК: G01S 1/00, G01S 19/00
Мітки: позиціонування, групування, моніторингу, система, системі, супутників
Код посилання
<a href="https://ua.patents.su/11-100927-sistema-dlya-monitoringu-grupuvannya-suputnikiv-sistemi-pozicionuvannya.html" target="_blank" rel="follow" title="База патентів України">Система для моніторингу групування супутників системи позиціонування</a>
Спосіб моніторингу джерел сейсмічних збурень системою сейсмічного групування при врахуванні форми сейсмічного сигналу
Номер патенту: 58922
Опубліковано: 26.04.2011
Автори: Солонець Олексій Іванович, Шапка Володимир Миколайович, Кулагін Костянтин Костянтинович, Петров Сергій Валерійович, Гордієнко Юрій Олексійович
МПК: G01V 1/28
Мітки: групування, форми, врахуванні, джерел, сейсмічних, сейсмічного, спосіб, моніторингу, збурень, системою, сигналу
Формула / Реферат:
Спосіб моніторингу джерел сейсмічних збурень системою сейсмічного групування при врахуванні форми сейсмічного сигналу, який полягає в цифровому формуванні діаграми спрямованості системи сейсмічного групування з максимумом, спрямованим на ймовірне джерело сейсмічних збурень, за принципом підсумовування з затримками, який відрізняється тим, що оцінюється відповідність форми сейсмічного сигналу, який реєструється системою сейсмічного...
Спосіб точного позиціонування і моніторингу мобільних об`єктів
Номер патенту: 76506
Опубліковано: 10.01.2013
Автори: Рязанцев Олег Вадимович, Пабат Анатолій Іванович, Шашков Андрій Вадимович
МПК: G01S 5/00, G08G 1/16, G01S 17/93
Мітки: об'єктів, мобільних, спосіб, точного, моніторингу, позиціонування
Формула / Реферат:
Спосіб точного позиціонування і моніторингу мобільних об'єктів, який полягає в тому, що навколо кожного мобільного об'єкту утворюють зони із контрольно-коректуючих станцій, формують за сигналами навігаційних космічних апаратів локальні диференціальні поправки або GPS/ГЛОНАСС-координати позиціонування, які передають по радіоканалу, який відрізняється тим, що локальні диференціальні поправки або GPS/ГЛОНАСС-координати позиціонування передають...
Транспортний засіб із стабілізацією системи технічного зору для моніторингу стану сільськогосподарських угідь
Номер патенту: 44256
Опубліковано: 25.09.2009
Автор: Броварець Олександр Олександрович
МПК: B62D 21/12
Мітки: транспортний, стабілізацією, сільськогосподарських, системі, угідь, стану, технічного, моніторингу, засіб, зору
Формула / Реферат:
Транспортний засіб із стабілізацією системи технічного зору для моніторингу стану сільськогосподарських угідь, що містить систему технічного зору, встановлену на телескопічну штангу, який відрізняється тим, що транспортний засіб містить стабілізаційну систему поплавкового типу, яка розміщена в точці кріплення телескопічної штанги до транспортного засобу, що дозволяє зменшити коливання та стабілізувати систему технічного зору для моніторингу...
Транспортний засіб із стабілізацією системи технічного зору для моніторингу стану сільськогосподарських угідь
Номер патенту: 44255
Опубліковано: 25.09.2009
Автор: Броварець Олександр Олександрович
МПК: B62D 21/12
Мітки: засіб, транспортний, стабілізацією, моніторингу, зору, стану, угідь, сільськогосподарських, системі, технічного
Формула / Реферат:
Транспортний засіб із стабілізацією системи технічного зору для моніторингу стану сільськогосподарських угідь, що містить систему технічного зору, встановлену на телескопічну штангу, який відрізняється тим, що містить стабілізаційну систему з пружним елементом, який розміщений в точці кріплення телескопічної штанги до транспортного засобу, що дозволяє зменшити коливання та стабілізувати систему технічного зору для моніторингу стану...
Транспортний засіб із стабілізацією системи технічного зору для моніторингу стану сільськогосподарських угідь
Номер патенту: 44254
Опубліковано: 25.09.2009
Автор: Броварець Олександр Олександрович
МПК: B62D 21/12
Мітки: сільськогосподарських, системі, зору, технічного, угідь, транспортний, засіб, стабілізацією, моніторингу, стану
Формула / Реферат:
Транспортний засіб із стабілізацією системи технічного зору для моніторингу стану сільськогосподарських угідь, що містить систему технічного зору, встановлену на телескопічну штангу, який відрізняється тим, що містить стабілізаційну систему з шарніром та в'язким елементом, які розміщені в точці кріплення телескопічної штанги до транспортного засобу, що дозволяє зменшити коливання та стабілізувати систему технічного зору для моніторингу стану...
Попередній патент: Агрохімічна водна суспоемульсія
Наступний патент: Лоток для пляшок
Випадковий патент: Регулятор тиску