Спосіб точного позиціонування і моніторингу мобільних об`єктів
Номер патенту: 76506
Опубліковано: 10.01.2013
Автори: Пабат Анатолій Іванович, Шашков Андрій Вадимович, Рязанцев Олег Вадимович
Формула / Реферат
Спосіб точного позиціонування і моніторингу мобільних об'єктів, який полягає в тому, що навколо кожного мобільного об'єкту утворюють зони із контрольно-коректуючих станцій, формують за сигналами навігаційних космічних апаратів локальні диференціальні поправки або GPS/ГЛОНАСС-координати позиціонування, які передають по радіоканалу, який відрізняється тим, що локальні диференціальні поправки або GPS/ГЛОНАСС-координати позиціонування передають безпосередньо на базовий мобільний об'єкт, в якому за сигналами навігаційних космічних апаратів визначають GPS/ГЛОНАСС-координати власного позиціонування та формують в GPS/ГЛОНАСС-навігаторі базового мобільного об'єкту координати власного позиціонування і координати позиціонування інших мобільних об'єктів, зону моніторингу яких визначають за особливостями руху базового мобільного об'єкту.
Текст
Реферат: Спосіб точного позиціонування і моніторингу мобільних об'єктів, який полягає в тому, що навколо кожного мобільного об'єкту утворюють зони із контрольно-коректуючих станцій, формують за сигналами навігаційних космічних апаратів локальні диференціальні поправки або GPS/ГЛОНАСС-координати позиціонування, які передають по радіоканалу. Локальні диференціальні поправки або GPS/ГЛОНАСС-координати позиціонування передають безпосередньо на базовий мобільний об'єкт, в якому за сигналами навігаційних космічних апаратів визначають GPS/ГЛОНАСС-координати власного позиціонування та формують в GPS/ГЛОНАСС-навігаторі базового мобільного об'єкту координати власного позиціонування і координати позиціонування інших мобільних об'єктів, зону моніторингу яких визначають за особливостями руху базового мобільного об'єкту. UA 76506 U (12) UA 76506 U UA 76506 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до техніки запобігання зіткненням транспортних засобів з використанням електромагнітного випромінювання, зокрема до області супутникової навігації, і може бути використана для підвищення безпеки експлуатації мобільних об'єктів, обладнаних GPS-навігаторами. Відомий спосіб запобігання зіткненню автомобіля (аналог), що полягає в тому, що приймають оптичне випромінювання предметів, фільтрують, пригнічуючи сигнали в діапазоні з довжиною хвиль менше 3 мкм, прийом і перетворення здійснюють для n ділянок, розташованих одна за одною в небезпечній зоні, визначення перешкоди здійснюють по різниці електричних сигналів з сусідніх ділянок, при цьому зі всіх ділянок з виявленими перешкодами вибирають ближню до автомобіля, визначають відстань до цієї перешкоди, порівнюють його з допустимою відстанню, визначуваною з урахуванням швидкості, і виробляють попереджувальний сигнал або команду на гальмування, що відрізняється тим, що одночасно приймають оптичне випромінювання від автомобілів, що знаходяться на попутній і зустрічній смугах руху, перетворюють їх в електричні сигнали, визначають відстані до транспортних засобів, що знаходяться на попутній і зустрічній смугах руху, визначають швидкості зближення з ними, визначають геометричні розміри транспортного засобу у напрямі руху і на основі даної інформації забезпечують видачу рекомендацій водієві автомобіля про дотримання безпечної дистанції руху щодо транспортного засобу, що знаходиться на попутній смузі руху і про можливість виконання маневру обгону його в умовах знаходження транспортного засобу на смузі зустрічного руху (патент № 2310922 (RU), G08G1/16, G01S17/93, 2007). Непереборним недоліком способу запобігання зіткненням автомобіля є фізично неможливе за наявності розміщених попереду транспортних засобів виявлення рухомого по зустрічній смузі транспортного засобу унаслідок прямолінійності розповсюдження оптичного випромінювання і для визначення можливості безпечного обгону необхідний виїзд автомобіля в зону прямої видимості, а саме на смугу зустрічного руху, але в цьому випадку безпека такого маневру забезпечується візуальним контактом і застосування способу запобігання зіткненням автомобіля виявляється даремним перш за все для найбільш небезпечного маневру - обгону. Крім того, реалізація способу вимагає значного апаратурного забезпечення, надійність якого представляється обмеженою, особливо в умовах недостатньої видимості, а вартість навіть у разі застосування сучасних інтегральних технологій електроніки надмірною. Відомий спосіб точного позиціонування і моніторингу мобільних об'єктів (прототип), який полягає в тому, що навколо кожного телецентру утворюють зони контрольно-коректуючих станцій, які формують за сигналами навігаційних космічних апаратів локальні диференціальні поправки, які по радіоканалу передають на телецентр і через передавач телецентру на мобільний об'єкт, який за сигналами навігаційних космічних апаратів з урахуванням локальних диференціальних поправок визначає власні координати та по радіоканалу передає на телецентр, звідки вони передаються в пункт керування рухом та разом з координатами мобільного об'єкту передаються на найближчий до мобільного об'єкту диспетчерський пункт по супутникових каналах зв'язку та формують сигнали корекції цілі, які за допомогою передавача відповідного телецентру адресно передають на мобільний об'єкт (патент № 2365932 (RU), G01S5/00, 2009). Недоліком способу точного позиціонування і моніторингу мобільних об'єктів є необхідність багатократного перетворення і ретрансляції локальних диференціальних поправок координат позиціонування мобільних об'єктів, що знижує достовірність і точність позиціонування та практично не дозволяє використовувати спосіб точного позиціонування і моніторингу мобільних об'єктів для підвищення безпеки експлуатації транспортних засобів, обладнаних GPSнавігаторами. В основу корисної моделі поставлено задачу удосконалення способу точного позиціонування і моніторингу мобільних об'єктів за допомогою візуалізації на дисплеї GPS/ГЛОНАСС-навігатора базового мобільного об'єкту (автомобіля) координат позиціонування інших мобільних об'єктів (автомобілів), розташованих в зоні моніторингу, а радіус зони моніторингу встановлюють пропорційним швидкості руху базового мобільного об'єкту (автомобіля), що дозволяє водієві обладнаного GPS/ГЛОНАСС-навігатором базового мобільного об'єкту контролювати розміщених в зоні моніторингу обладнаних GPS/ГЛОНАССнавігаторами інших мобільних об'єктів і достовірно прогнозувати рівень безпеки експлуатації базового мобільного об'єкту незалежно від умов видимості і оглядовості. Поставлена задача вирішується тим, що в способі точного позиціонування і моніторингу мобільних об'єктів, який полягає в тому, що навколо кожного мобільного об'єкту утворюють зони із контрольно-коректуючих станцій, формують за сигналами навігаційних космічних апаратів локальні диференціальні поправки або GPS/ГЛОНАСС-координати позиціонування, які 1 UA 76506 U 5 10 15 20 25 30 35 40 45 50 55 60 передають по радіоканалу, а локальні диференціальні поправки або GPS/ГЛОНАСС-координати позиціонування передають безпосередньо на базовий мобільний об'єкт, в якому за сигналами навігаційних космічних апаратів визначають GPS/ГЛОНАСС-координати власного позиціонування та формують в GPS/ГЛОНАСС-навігаторі базового мобільного об'єкту координати власного позиціонування і координати позиціонування інших мобільних об'єктів, зону моніторингу яких визначають особливостями руху базового мобільного об'єкту. Використання локальних диференціальних поправок або GPS/ГЛОНАСС-координат позиціонування мобільних об'єктів, які передають безпосередньо на базовий мобільний об'єкт, виключає необхідність використання телецентрів, що значно спрощує функціонування системи моніторингу. Формування в GPS/ГЛОНАСС-навігаторі базового мобільного об'єкту координат власного позиціонування і координат позиціонування інших мобільних об'єктів забезпечує оперативний моніторинг дорожньої обстановки та сприяє підвищенню безпеки руху. Існуючі системи космічної навігації GPS за станом на початок 2012 року забезпечують помилку доступних навігаційних визначень по довготі і широті 2,00-8,76 м, а система ГЛОНАСС - до 2,5-2,8 м, проте при одночасному використанні обох навігаційних систем точність позиціонування складає 1,00-1,5 м і забезпечує використання технології космічної навігації для підвищення безпеки експлуатації мобільних об'єктів (автомобілів) за допомогою оперативного моніторингу положення мобільних об'єктів (автомобілів) навколо базового мобільного об'єкту, що дозволяє водієві базового мобільного об'єкту (автомобіля) достовірно визначати відстані до тих, що знаходяться на попутній і зустрічній смугах руху мобільних об'єктів і формувати висновок про дотримання безпечної дистанції руху щодо транспортного засобу, який знаходиться на попутній смузі руху, і про можливість виконання маневру обгону транспортного засобу, який знаходиться на смузі зустрічного руху, а також рухомих об'єктів, що наближаються з бічних напрямів, і нерухомих автомобілів з ввімкненими GPS/ГЛОНАСС-навігаторами. Реалізація способу точного позиціонування і моніторингу мобільних об'єктів здійснюється таким чином. Мобільні об'єкти (автомобілі) обладнують GPS/ГЛОНАСС-навігаторами, здатними безпосередньо за сигналами космічної навігаційної системи визначати координати базового мобільного об'єкту та координати інших мобільних об'єктів по локальних диференціальних поправках або власних координатах інших мобільних об'єктів (автомобілів), які передають по радіоканалу на базовий мобільний об'єкт. На дисплеї GPS/ГЛОНАСС-навігатора формують відмітки місцеположення базового мобільного об'єкту (автомобіля) і відмітки місцеположення інших мобільних об'єктів (автомобілів), різниця координат яких щодо координат базового мобільного об'єкту не перевищує параметрів координат зони моніторингу. Параметри координат зони моніторингу автоматично встановлюють пропорційними швидкості руху базового мобільного об'єкту, наприклад для умов міського руху в межах 50-100 м або для умов швидкісного заміського руху в межах 50-300 м. Параметри зони моніторингу встановлюють також вручну симетрично або асиметрично, наприклад збільшують у напрямі руху у разі особливих умов руху (густий туман, пил, складний рельєф дороги і таке інше). При попаданні в зону моніторингу базового мобільного об'єкту інших мобільних об'єктів, обладнаних навігаторами, на дисплеї GPS/ГЛОНАСС-навігатора базового мобільного об'єкту формують відмітку координат інших мобільних об'єктів, що дозволяє водієві достовірно визначати відстані до тих, що знаходяться на попутній і зустрічній смугах руху мобільних об'єктів і проводити висновок про дотримання безпечної дистанції руху щодо транспортного засобу, який знаходиться на попутній смузі руху, і про можливість виконання маневру обгону транспортного засобу, який знаходиться на смузі зустрічного руху, а також рухомих об'єктів, що наближаються з бічних напрямів, і нерухомих автомобілів з ввімкненим GPS/ГЛОНАСС-навігатором. Реалізація способу запобігання зіткненням автомобілів найпростіше реалізується за допомогою навігаторів, задіяних в системі охоронної сигналізації. Таким чином, пропонований спосіб точного позиціонування і моніторингу мобільних об'єктів дійсно дозволяє водієві обладнаного GPS/ГЛОНАСС-навігатором базового мобільного об'єкту контролювати наявні в зоні моніторингу обладнані GPS/ГЛОНАСС-навігаторами інші мобільні об'єкти і достовірно прогнозувати рівень безпеки експлуатації базового мобільного об'єкту незалежно від умов видимості і оглядовості за допомогою візуалізації на дисплеї GPS/ГЛОНАСС-навігатора базового мобільного об'єкту (автомобіля) координат позиціонування, розташованих в зоні моніторингу інших мобільних об'єктів (автомобілів), а радіус зони моніторингу встановлюють пропорційним швидкості руху базового мобільного об'єкту (автомобіля) або задають вручну залежно від умов експлуатації мобільних об'єктів, що сприяє підвищенню безпеки експлуатації мобільних об'єктів (автомобілів). 2 UA 76506 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 Спосіб точного позиціонування і моніторингу мобільних об'єктів, який полягає в тому, що навколо кожного мобільного об'єкту утворюють зони із контрольно-коректуючих станцій, формують за сигналами навігаційних космічних апаратів локальні диференціальні поправки або GPS/ГЛОНАСС-координати позиціонування, які передають по радіоканалу, який відрізняється тим, що локальні диференціальні поправки або GPS/ГЛОНАСС-координати позиціонування передають безпосередньо на базовий мобільний об'єкт, в якому за сигналами навігаційних космічних апаратів визначають GPS/ГЛОНАСС-координати власного позиціонування та формують в GPS/ГЛОНАСС-навігаторі базового мобільного об'єкту координати власного позиціонування і координати позиціонування інших мобільних об'єктів, зону моніторингу яких визначають за особливостями руху базового мобільного об'єкту. Комп’ютерна верстка Л.Литвиненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for accurate positioning and monitoring of mobile objects
Автори англійськоюPabat Anatolii Ivanovych, Riazantsev Oleh Vadymovych, Shashkov Andrei Vadymovych
Назва патенту російськоюСпособ точного позиционирования и мониторинга мобильных объектов
Автори російськоюПабат Анатолий Иванович, Рязанцев Олег Вадимович, Шашков Андрей Вадимович
МПК / Мітки
МПК: G01S 17/93, G08G 1/16, G01S 5/00
Мітки: спосіб, точного, позиціонування, мобільних, об'єктів, моніторингу
Код посилання
<a href="https://ua.patents.su/5-76506-sposib-tochnogo-pozicionuvannya-i-monitoringu-mobilnikh-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб точного позиціонування і моніторингу мобільних об`єктів</a>
Система навігації, реєстрації, моніторингу, охорони і контролю стаціонарних і мобільних об’єктів
Номер патенту: 76274
Опубліковано: 25.12.2012
Автори: Ільічєв Роман Владіміровіч, Капралов Алєксандр Анатольєвіч, Батраков Андрєй Андрєєвіч, Ковтунєнко Константін Алєксєєвіч, Напилов Алєксандр Юрьєвіч, Кулаков Сєргєй Вікторовіч, Чєрномазов Максім Андрєєвіч, Пісарєв Алєксандр Павловіч, Іванов Алєксандр Владіміровіч, Абрамов Ігорь Валєрьєвіч, Воронов Алєксандр Сєргєєвіч, Сичов Андрєй Алєксандровіч, Гундаєв Ілья Вадімовіч, Носов Сєргєй Владіміровіч
МПК: G08B 25/10, B60R 25/00, G08G 1/123
Мітки: навігації, моніторингу, контролю, система, охорони, мобільних, стаціонарних, реєстрації, об'єктів
Формула / Реферат:
1. Система навігації, реєстрації, моніторингу, охорони і контролю стаціонарних і мобільних об'єктів з використанням глобальної навігаційної супутникової системи, яка включає встановлений на рухливому об'єкті навігаційний двосистемний ГЛОНАСС/GPS приймач з антеною і обчислювальний блок, а так само диспетчерський пункт з персональним комп'ютером, рухливий об'єкт, забезпечений пристроєм для передачі інформації по Wi-Fi, Bluetooth, 3-G, IK і/або...
Спосіб ультразвукового локального позиціонування рухомих об’єктів
Номер патенту: 71860
Опубліковано: 25.07.2012
Автори: Лівнов Віталій Олександрович, Коваль Юрій Олександрович
МПК: G01S 11/00
Мітки: об'єктів, рухомих, ультразвукового, позиціонування, локального, спосіб
Формула / Реферат:
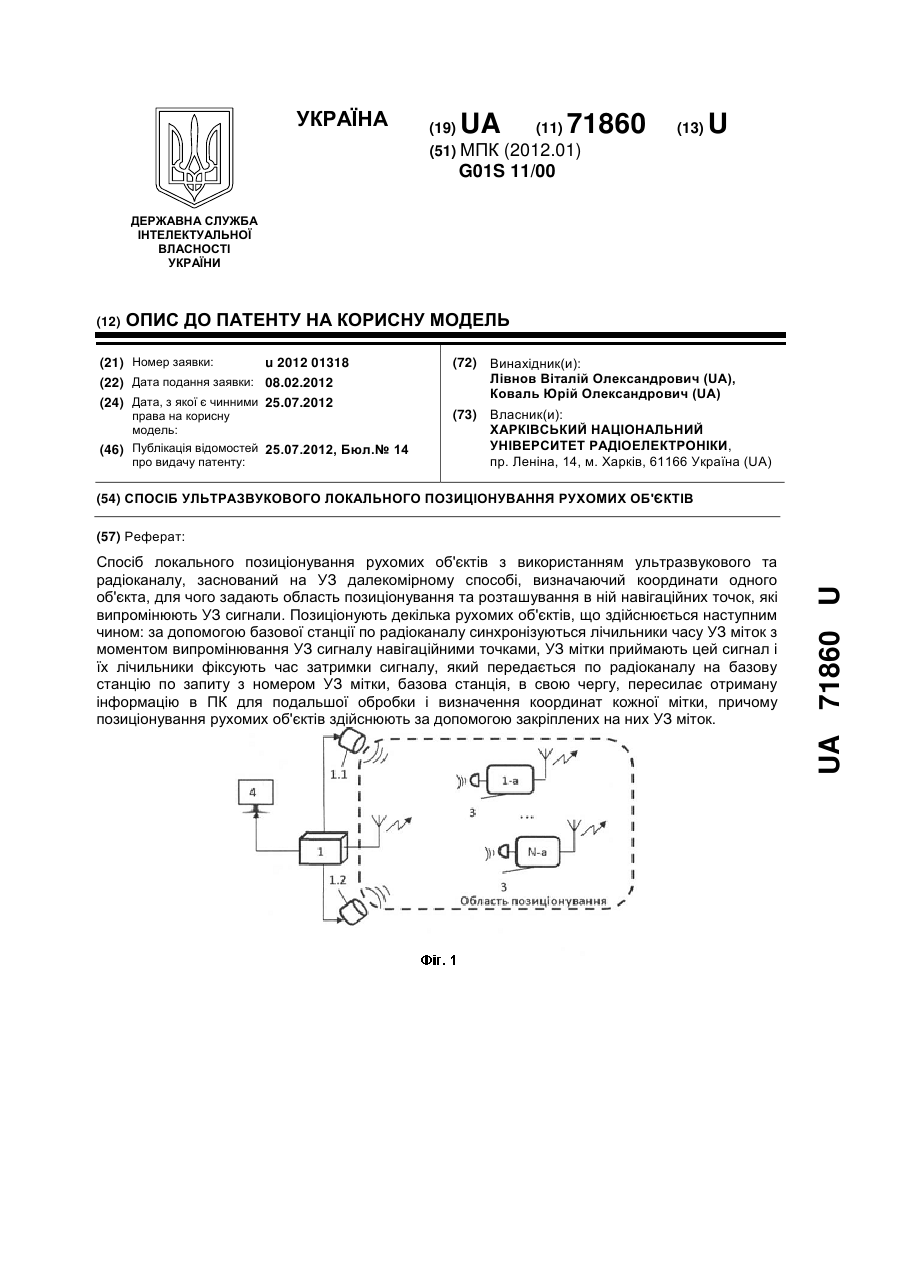
Спосіб локального позиціонування рухомих об'єктів з використанням ультразвукового та радіоканалу, який заснований на УЗ далекомірному способі, що визначає координати одного об'єкта, для чого задають область позиціонування та розташування в ній навігаційних точок, які випромінюють УЗ сигнали, який відрізняється тим, що позиціонують декілька рухомих об'єктів, що здійснюється наступним чином: за допомогою базової станції по радіоканалу...
Спосіб позиціонування вузлів у бездротових сенсорних мережах
Номер патенту: 65765
Опубліковано: 12.12.2011
Автори: Зеленін Анатолій Миколайович, Іваненко Вікторія Олександрівна
МПК: H04W 64/00
Мітки: спосіб, сенсорних, бездротових, вузлів, мережах, позиціонування
Формула / Реферат:
Спосіб позиціонування вузлів у бездротових сенсорних мережах, заснований на визначенні дальності між вузлами і базовими станціями, точні глобальні координати яких відомі, шляхом визначення величини загасання прийнятого пілот-сигналу, при відомому рівні переданого, який відрізняється тим, що при (n+1) базових станцій, де n - мінімально необхідна для позиціонування кількість базових станцій, кожна базова станція оснащена мотом - вузлом...
Спосіб позиціонування голови глядача при використанні нашоломного дисплея
Номер патенту: 81939
Опубліковано: 25.02.2008
Автори: Ощепков Антон Анатольович, Ощепков Анатолій Миколайович
МПК: H04N 3/00, G02B 27/22, G01B 7/00
Мітки: використанні, глядача, дисплея, нашоломного, позиціонування, голови, спосіб
Формула / Реферат:
1. Спосіб позиціонування голови глядача при використанні нашоломного дисплея, при якому визначають кутове положення голови глядача відносно першої системи координат, у якій формують зображення на дисплей, і цю інформацію передають у систему візуалізації нашоломного дисплея, який відрізняється тим, що попередньо визначають вектор кутової швидкості другої, зв'язаної з головою глядача, системи координат за допомогою закріплених на його голові...
Спосіб позиціонування абонентів в мережі gsm
Номер патенту: 52369
Опубліковано: 25.08.2010
Автори: Бибка Олександр Іванович, Дереєв Олександр В'ячеславович, Зеленін Анатолій Миколайович
МПК: H04B 7/02
Мітки: мережі, спосіб, абонентів, позиціонування
Формула / Реферат:
Спосіб позиціонування абонентів в мережі GSM, що включає радіолокаційну технологію вимірювань часу проходження радіосигналу від мобільної станції до найближчих трьох базових станцій, після чого розраховують відстань до відповідних базових станцій і радіусами, відповідними до розрахованих відстаней, проводять кола з центрами, які співпадають з базовими станціями, причому точка перетину цих кіл характеризує місцезнаходження абонента (мобільної...
Попередній патент: Сівалка
Наступний патент: Підйомник паркувальний
Випадковий патент: Пристрій для розподілення потоку пляшок