Система для захисту робочого органа перевантажувальної машини від зіткнення з перешкодою
Номер патенту: 102881
Опубліковано: 27.08.2013
Автори: Дунаєв Вадім Ігорєвіч, Ніколаєв Вячєслав Вікторовіч, Фєдосовскій Міхаіл Євгєньєвіч, Іголкін Віталій Алєксєєвіч
Формула / Реферат
1. Система для захисту від зіткнення з перешкодою робочих органів перевантажувальної машини для перевантаження ядерного палива, що містить датчики (6) положення, розміщені по периферії робочих органів, яка відрізняється тим, що вона містить опорну раму (1), що має опорну поверхню і виконану з можливістю прикріплення під перевантажувальною машиною, рухомий каркас (2), що містить верхню раму (7), розміщену з опорою на опорну поверхню опорної рами (1), і нижню раму (8), з'єднану з верхньою рамою (7), так що рухомий каркас (2) охоплює собою робочі органи перевантажувальної машини, і кінцеві вимикачі (4), прикріплені до опорної рами (1) і виконані з можливістю формування сигналу для зупинення перевантажувальної машини при зсуві рухомого каркаса (2), розміщеного на опорній рамі (1), причому датчики (6) положення розміщені на деякій відстані від робочих органів у радіальному напрямку.
2. Система за п. 1, яка відрізняється тим, що датчики (6) положення розподілені по зовнішній периферії опорної рами (1) рівномірно.
3. Система за п. 1, яка відрізняється тим, що кожний датчик положення закріплений на опорній рамі (1) за допомогою відповідного йому кронштейна з можливістю переміщення в радіальному напрямку.
4. Система за п. 1, яка відрізняється тим, що датчики (6) положення виконані у вигляді комбінованих випромінювача й приймача ультразвукових сигналів.
5. Система за п. 1, яка відрізняється тим, що датчики (6) положення розміщені так, що випромінюваний ними ультразвуковий сигнал спочатку поширюється назовні паралельно площини опорної рами (1), а потім відбивається вниз відбивачем, закріпленим на зазначеному кронштейні.
6. Система за п. 1, яка відрізняється тим, що кронштейн і відбивач виконані як одне ціле.
7. Система за п. 1, яка відрізняється тим, що внутрішня частина опорної рами (1) виконана із зовнішнім конічним пояском.
8. Система за п. 1, яка відрізняється тим, що опорна поверхня опорної рами (1) розміщена паралельно нижній площині поворотної площадки перевантажувальної машини для перевантаження ядерного палива.
9. Система за п. 1, яка відрізняється тим, що кінцеві вимикачі прикріплені до опорної рами (1) знизу, так що їхні розмикальні штовхачі проходять крізь отвори в опорній рамі (1) і впираються в нижню площину верхньої рами (7) рухомого каркаса (2), розміщеної на опорній рамі (1).
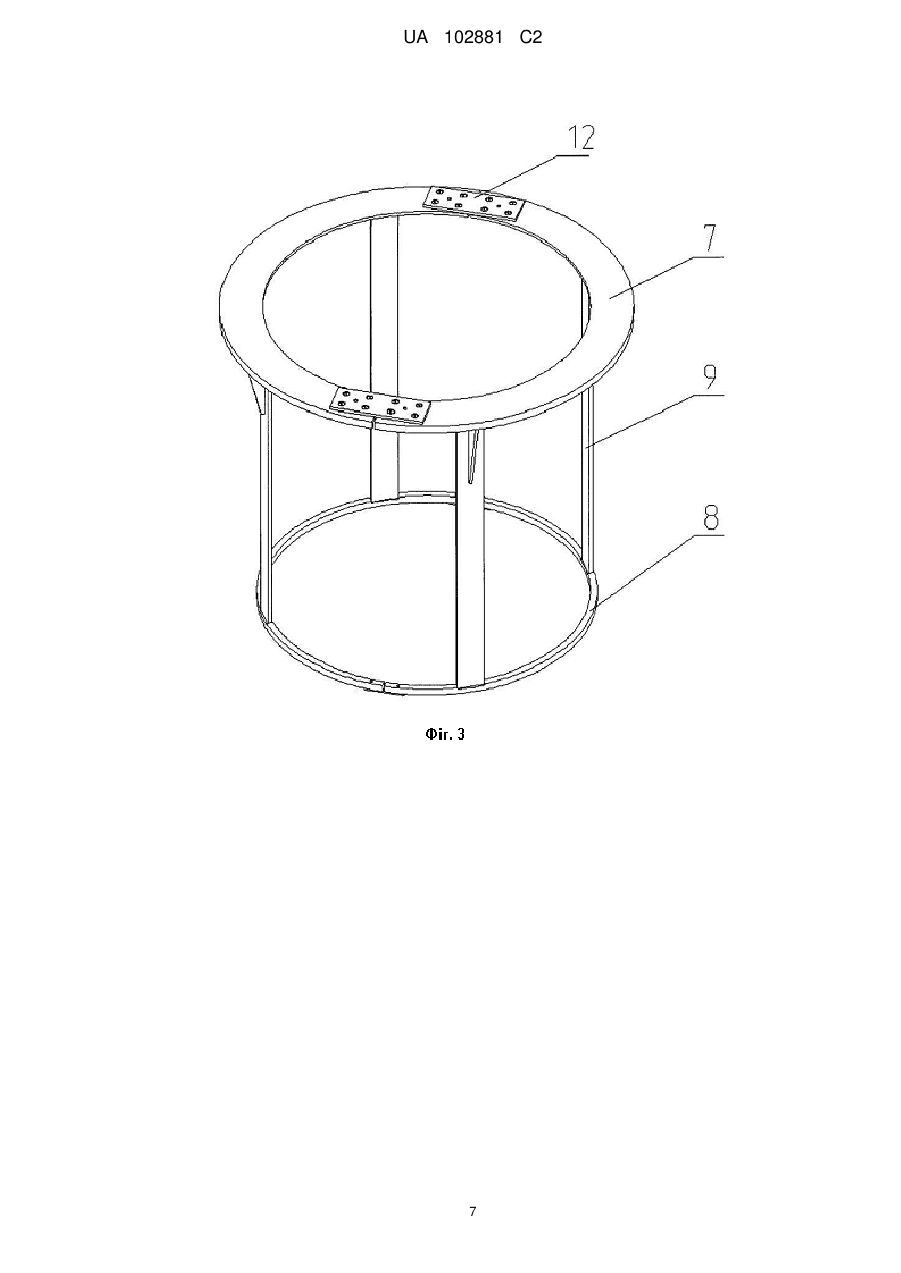
10. Система за п. 1, яка відрізняється тим, що нижня рама (8) рухомого каркаса (2) з'єднана з верхньою рамою (7) стійками (9).
11. Система за п. 10, яка відрізняється тим, що кожна стійка (9) містить косинку підсилення, виконану у вигляді прямокутного трикутника, у якому один катет жорстко з'єднаний із зовнішньою стороною стійки (9), а інший катет жорстко з'єднаний з нижньою стороною верхньої рами (7) рухомого каркаса (2).
12. Система за п. 1, яка відрізняється тим, що форма верхньої рами (7) рухомого каркаса (2) подібна формі опорної рами (1).
13. Система за п. 1, яка відрізняється тим, що нижня рама (8) рухомого каркаса (2) розміщена паралельно його верхній рамі (7).
14. Система за п. 13, яка відрізняється тим, що площа, охоплювана нижньою рамою (8) рухомого каркаса (2), відрізняється від площі, охоплюваної верхньою рамою (7) рухомого каркаса (2).
15. Система за п. 14, яка відрізняється тим, що площа, охоплювана нижньою рамою (8) рухомого каркаса (2), перевершує площу, охоплювану верхньою рамою (7) рухомого каркаса (2).
Текст
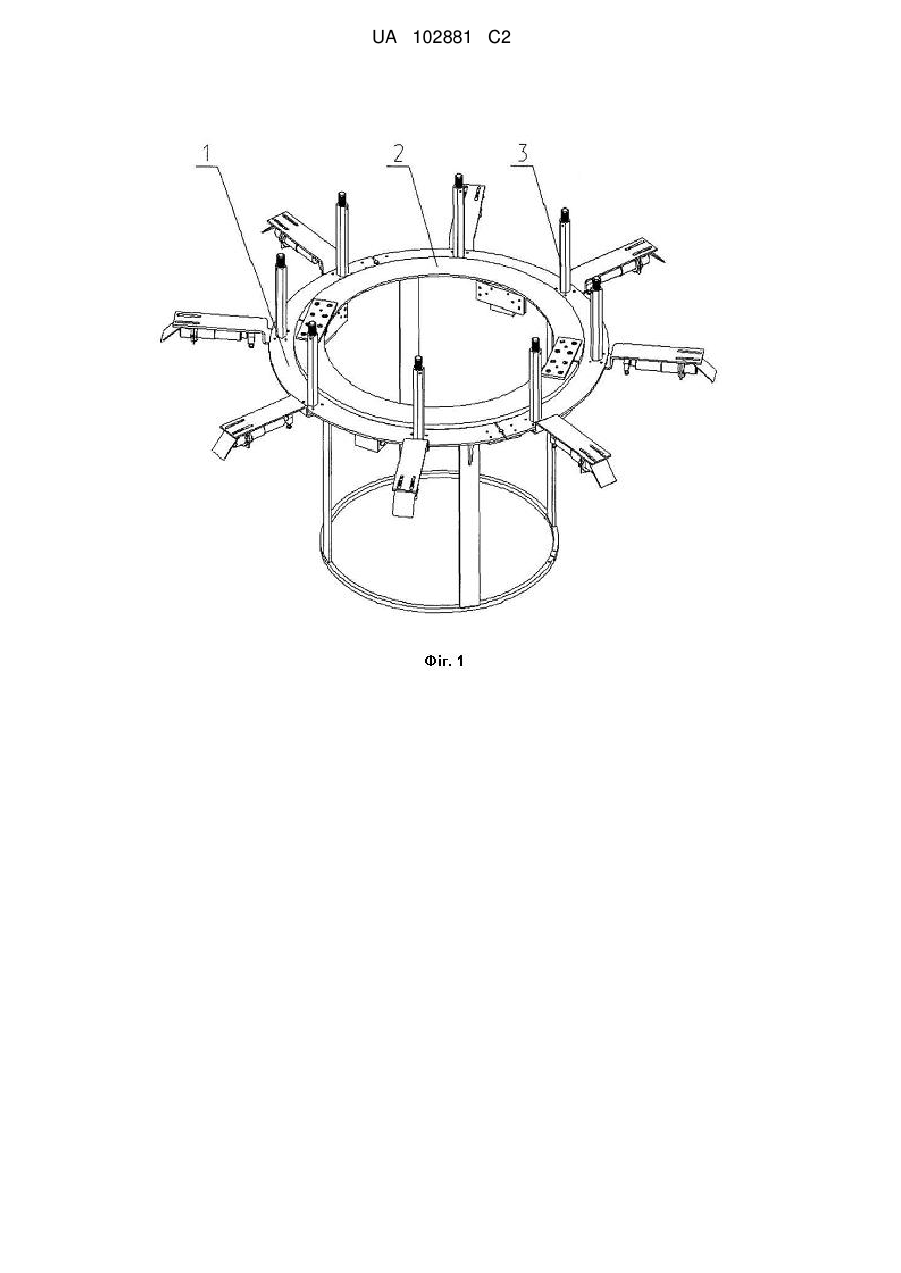
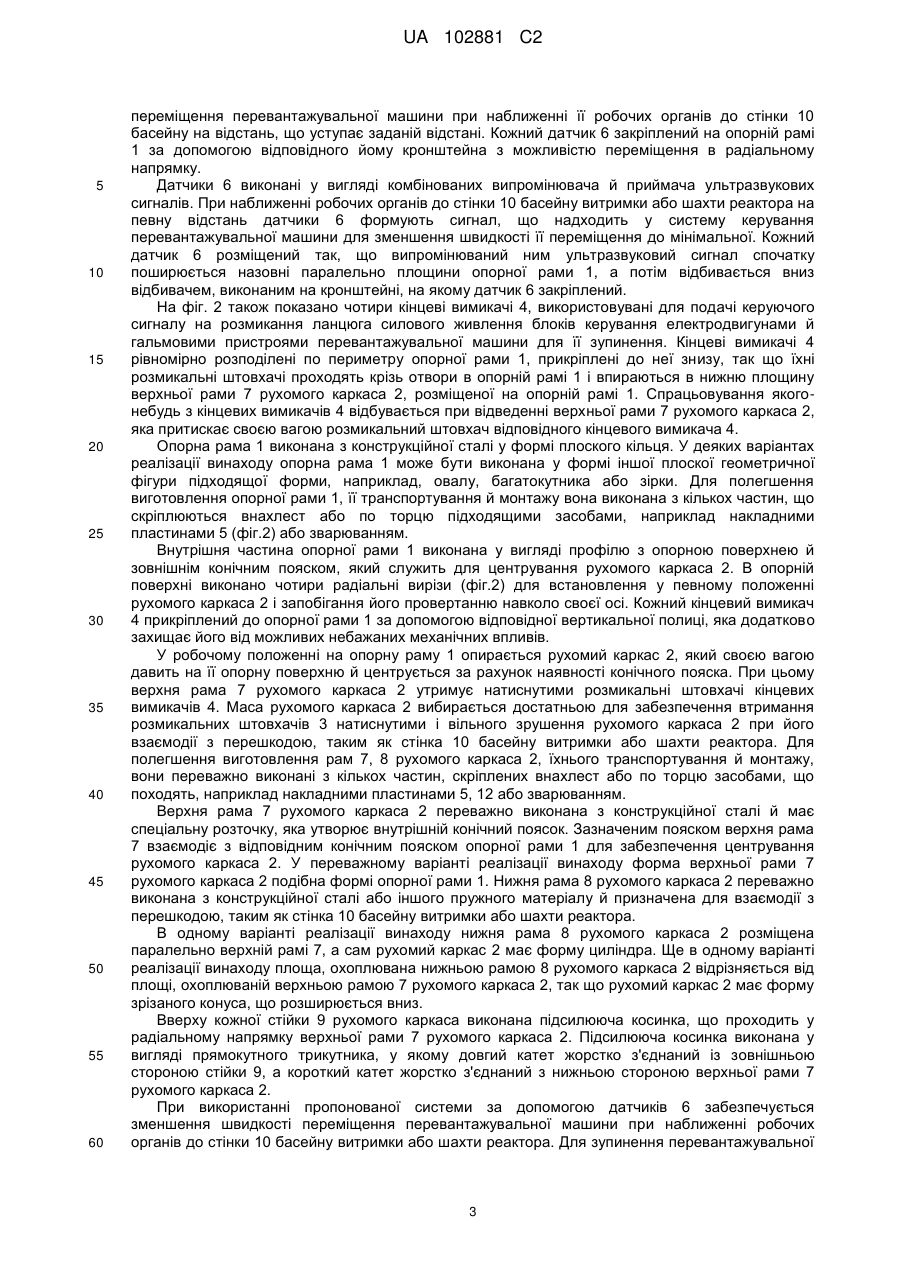
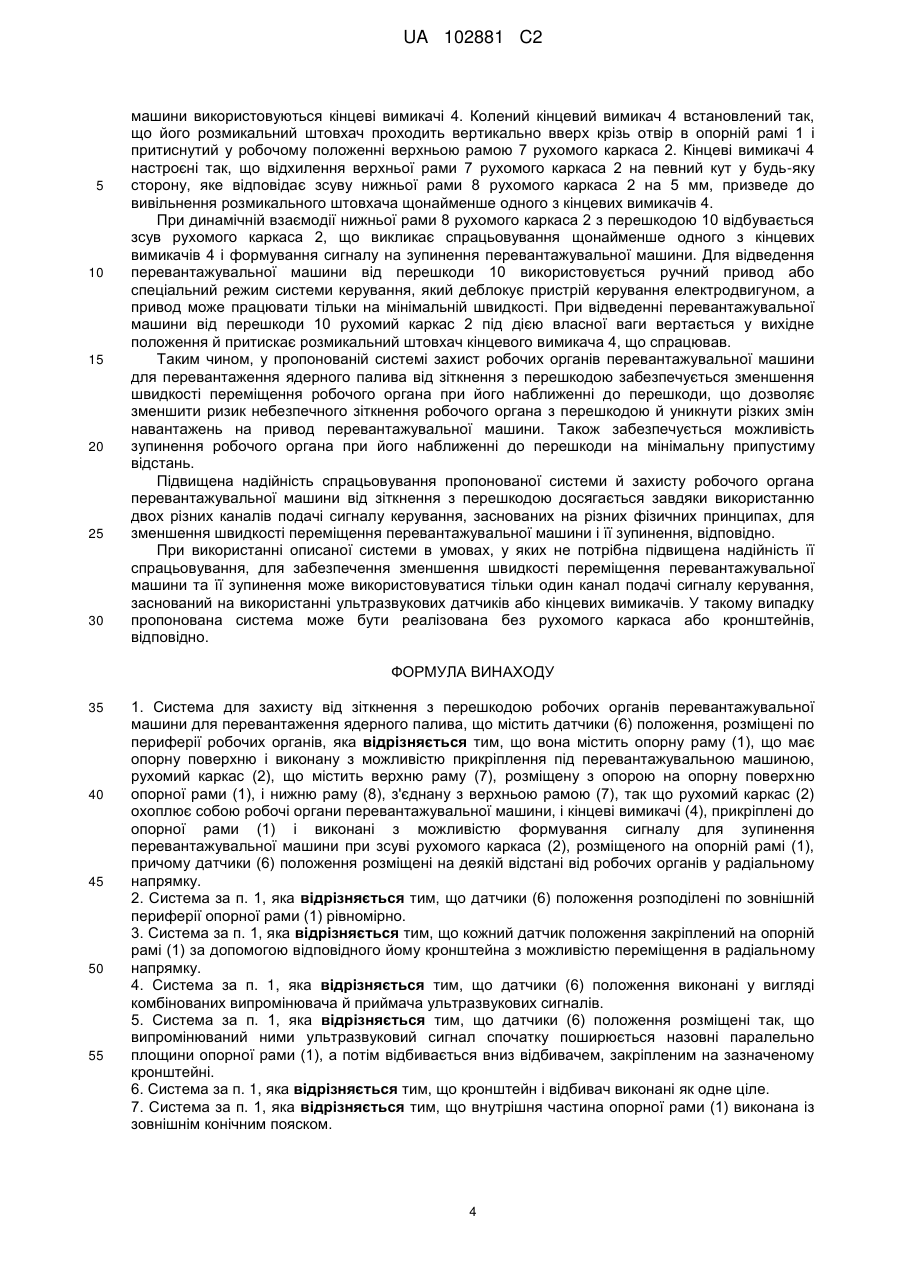
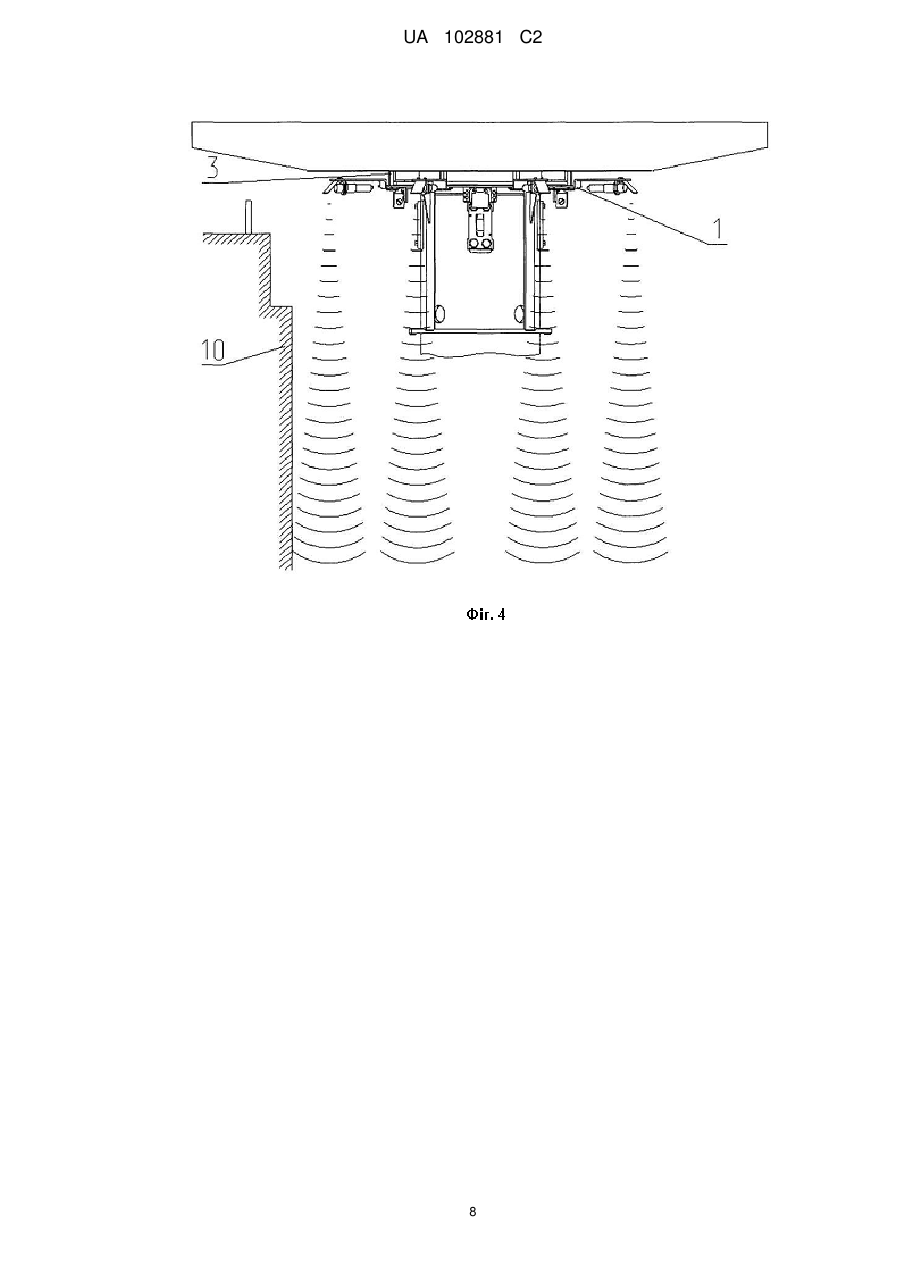
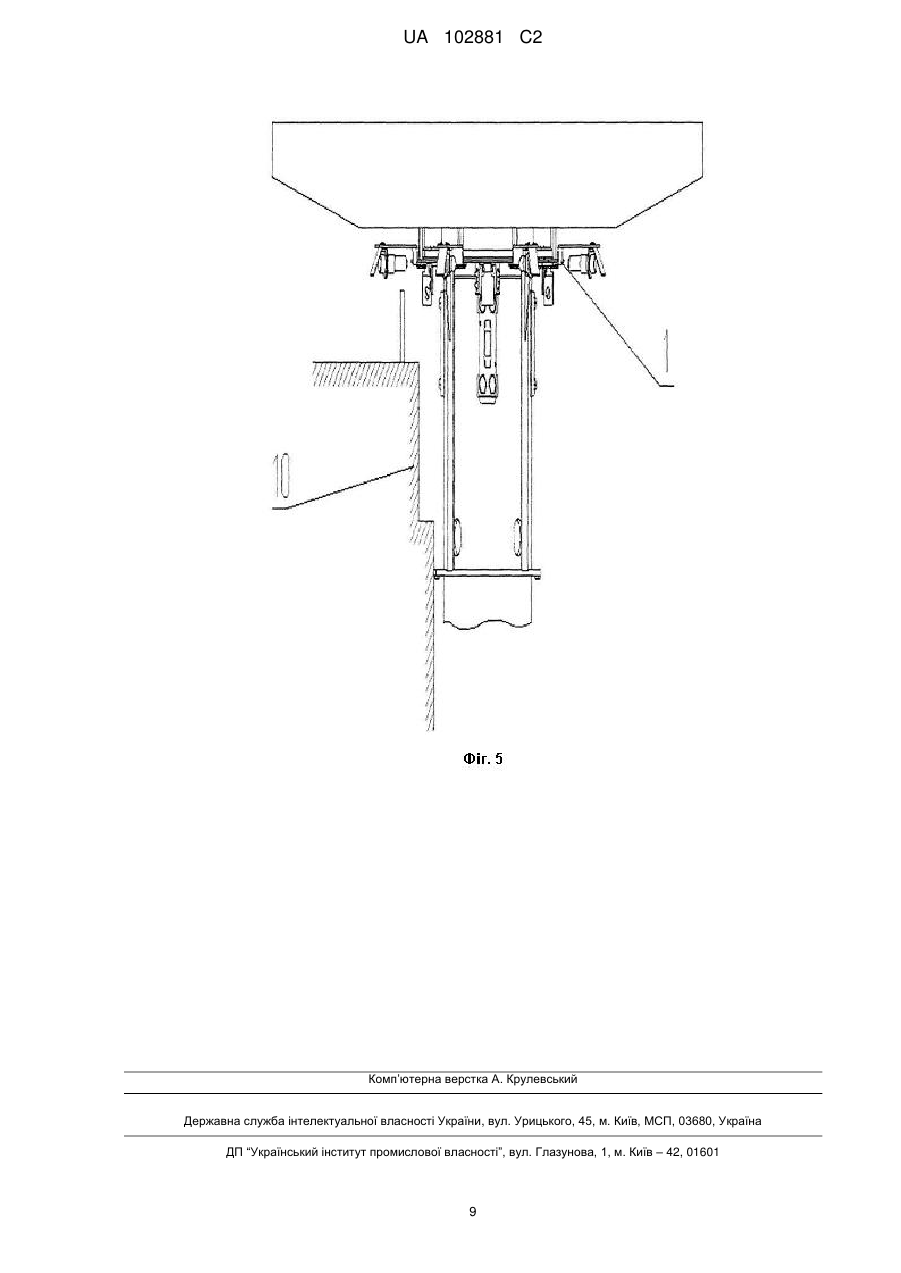
Реферат: Система для захисту від зіткнення з перешкодою робочих органів перевантажувальної машини при перевантаженні ядерного палива містить датчики положення, розміщені по периферії робочих органів. Також система містить опорну раму, що має опорну поверхню й виконану з можливістю прикріплення під перевантажувальною машиною. Крім того, система містить рухомий каркас, що містить верхню раму, розміщену з опорою на опорну поверхню опорної рами, і нижню раму, з'єднану з верхньою рамою, так що рухомий каркас охоплює робочі органи перевантажувальної машини. До опорної рами прикріплені кінцеві вимикачі, що формують сигнал для зупинення перевантажувальної машини при зсуві рухомого каркаса, розміщеного на опорній рамі. Датчики положення формують сигнал для вповільнення переміщення перевантажувальної машини при наближенні її робочих органів до перешкоди на відстань, що уступає заданій відстані, і розміщені по периферії робочих органів на деякій відстані від них у радіальному напрямку. Підвищена надійність спрацьовування системи й захист робочого органа досягається завдяки використанню двох різних каналів подачі сигналу керування, заснованих на різних фізичних принципах, для зменшення швидкості переміщення перевантажувальної машини і її зупинення, відповідно. UA 102881 C2 (12) UA 102881 C2 UA 102881 C2 5 10 15 20 25 30 35 40 45 50 55 60 Даний винахід належить до області ядерної енергетики й особливо до системи для захисту від зіткнення з перешкодою робочого органа перевантажувальної машини, такого як робоча або телевізійна штанга для перевантаження ядерного палива. Разом з тим, розкритий винаходом принцип може бути застосований в інших галузях промисловості для запобігання зіткненню робочого органа з перешкодою. Експлуатація ядерного реактора вимагає особливих заходів, що забезпечують безпеку робіт з перевантаження ядерного палива. Перевантаження ядерного палива здійснюється за допомогою перевантажувальної машини й включає комплекс робіт з виймання й переміщення щонайменше одної тепловиділяючої зборки з метою її заміни або перестановки в ядерному реакторі. Перевантажувальна машина виконана у вигляді робота-маніпулятора із програмним керуванням, що працює безпосередньо з підлоги реакторного залу й оснащеного робочою й телевізійною штангою. Власно перевантаження тепловиділяючої збірки здійснюється робочою штангою. Весь процес перевантаження контролюється оператором через монітор за допомогою спеціальної телевізійної системи, із телевізійною штангою, розміщеною біля робочої штанги. При переміщенні робочої або телевізійної штанги можливі її зіткнення з перешкодою, таким як стінка басейну витримки або шахти реактора. Для виключення таких зіткнень може бути використане відоме з RU29397 (23.12.2002) обладнання для контролю положення перевантажувальної машини ядерного реактора, що містить ультразвукові датчики положення, розміщені по периферії робочих органів. Недоліком відомого рішення, застосовуваного з метою захисту від зіткнення з перешкодою робочих органів перевантажувальної машини для перевантаження ядерного палива, є відсутність можливості зменшення швидкості переміщення робочого органа при його наближенні до перешкоди. Відсутність такої можливості призводить до збільшення ризику небезпечного зіткнення робочого органа з перешкодою й різкого змінення навантажень на привод перевантажувальної машини. Задачею даного винаходу є забезпечення захисту робочих органів перевантажувальної машини для перевантаження ядерного палива від зіткнення з перешкодою, таким як стінка басейну витримки або шахти реактора. У переважному варіанті реалізації винаходу пропонована система для захисту від зіткнення з перешкодою робочих органів перевантажувальної машини для перевантаження ядерного палива, містить датчики положення, розміщені по периферії робочих органів. При цьому пропонована система містить опорну раму, що має опорну поверхню й виконану з можливістю прикріплення під перевантажувальною машиною. Крім того, пропонована система містить рухомий каркас, що містить верхню раму, розміщену з опорою на опорній поверхні опорної рами, і нижню раму, з'єднану з верхньою рамою, так що рухомий каркас охоплює собою робочі органи перевантажувальної машини. До опорної рами прикріплені кінцеві вимикачі, виконані з можливістю формування сигналу для зупинення перевантажувальної машини при зсуві рухомого каркаса, розміщеного на опорній рамі. Датчики положення розміщені по периферії робочихорганів на деякій відстані від них у радіальному напрямку. В одному варіанті реалізації винаходу сигнал від датчика для вповільнення переміщення перевантажувальної машини при наближенні її робочих органів до перешкоди на відстань, що уступає заданій відстані, автоматично передається в автоматизовану систему керування перевантажувальної машини. В альтернативному варіанті реалізації винаходу такий сигнал від датчика є інформаційним, наприклад світловим або звуковим, для оператора, що управляє роботою перевантажувальної машини. Завдяки такій конструкції для захисту від зіткнення з перешкодою робочого органа перевантажувальної машини для перевантаження ядерного палива використовуються два різні канали для подачі сигналу керування, заснованих на різних фізичних принципах відповідно для зменшення швидкості переміщення перевантажувальної машини до мінімальної при наближенні робочого органа до перешкоди й зупинення перевантажувальної машини. Датчики положення розподілені по зовнішній периферії опорної рами рівномірно й використовуються для створення суцільної або дискретної кругової зони чутливості навколо робочих органів. Сторонній предмет, що виявився в зоні поширення ультразвукового сигналу, створює відбитий сигнал, вловлюваний цим або іншим ультразвуковим датчиком, який у цьому випадку видає відповідний сигнал для зменшення швидкості переміщення перевантажувальної машини. Кожний датчик положення закріплений на опорній рамі за допомогою відповідного йому кронштейна з можливістю переміщення в радіальному напрямку. Завдяки цьому забезпечується можливість регулювання охоплення кругової зони чутливості навколо робочого органа. 1 UA 102881 C2 5 10 15 20 25 30 35 40 45 50 55 60 У переважному варіанті реалізації винаходу датчики положення виконані у вигляді комбінованих випромінювача й приймача ультразвукових сигналів. Датчики положення розміщені так, що випромінюваний ними ультразвуковий сигнал спочатку поширюється назовні паралельно площини опорної рами, а потім відбивається вниз відбивачем, що закріплений на зазначеному кронштейні й проходить униз під кутом 45°. Кронштейн і відбивач жорстко скріплені один з одним або виконані як одне ціле. Внутрішня частина опорної рами виконана із зовнішнім конічним пояском, взаємодіючим із відповідним пояском верхньої рами рухомого каркаса для забезпечення центрування рухомого каркаса. У переважному варіанті реалізації винаходу опорна поверхня опорної рами розміщена паралельно нижній площини поворотної площадки перевантажувальної машини для перевантаження ядерного палива. Кінцеві вимикачі прикріплені до опорної рами знизу, так що їхні розмикальні штовхачі проходять крізь отвори в опорній рамі й упираються в нижню площину верхньої рами рухомого каркаса, яка розміщена на опорній рамі. У переважному варіанті реалізації винаходу нижня рама рухомого каркаса з'єднана з верхньою рамою стійками. Кожна стійка містить косинку підсилення, виконану у вигляді прямокутного трикутника, у якому один катет, наприклад довгий, жорстко з'єднаний із зовнішньою стороною стійки, а інший катет, наприклад короткий, жорстко з'єднаний з нижньою стороною верхньої рами рухомого каркаса. Косинки служать для додання додаткової жорсткості всьому рухомому каркасу й стійкам зокрема, а також для придання певного положення рухомому каркасу відносно опорної рами в робочому положенні шляхом взаємодії з відповідними ним вирізами на внутрішній частині опорної рами. Крім того, косинки задають напрямок зсуву рухомого каркаса відносно опорної рами при динамічній взаємодії рухомого каркаса з перешкодою, наприклад, таким як стінка басейну витримки або шахти реактора, і виключають скидання, провертання або зависання рухомого каркаса. У переважному варіанті реалізації винаходу форма верхньої рами рухомого каркаса подібна формі опорної рами рухомого каркаса. Нижня рама рухомого каркаса розміщена паралельно його верхній рамі. В одному варіанті реалізації винаходу площа, охоплювана нижньою рамою рухомого каркаса, відрізняється від площі, охоплюваної верхньою рамою рухомого каркаса, наприклад, перевершує цю площу, так що рухомий каркас має форму зрізаного конуса, що розширюється вниз. Така конструкція рухомого каркаса забезпечує більш раннє спрацьовування якого-небудь з кінцевих вимикачів при неприпустимому зближенні робочих органів перевантажувальної машини з перешкодою. Пропонована система, пояснюється кресленнями, на яких на фіг. 1 показане зверху перспективне зображення одного варіанта реалізації пропонованої системи; на фіг. 2 показане знизу перспективне зображення опорної рами; на фіг. 3 показане зверху перспективне зображення рухомого каркаса; на фіг. 4 показана збоку пропонована система, прикріплена до поворотної площадки перевантажувальної машини, із працюючими ультразвуковими датчиками положення; на фіг. 5 показана збоку пропонована система в момент зупинки перевантажувальної машини при торканні нижнього кільця рухомого каркаса зі стінкою басейну витримки. Як показано на фіг. 1, пропонована система для захисту від зіткнення з перешкодою робочих органів перевантажувальної машини містить опорну раму 1, що має опорну поверхню, на яку опирається рухомий каркас 2. На фіг. 3 показано, що рухомий каркас 2 конструктивно являє собою циліндричну клітку, що складається з верхньої рами 7 і нижньої рами 8, жорстко з'єднаних між собою стійками 9. Рами 7 і 8 виконані у вигляді плоских кілець. Верхня рама 7 виконана з можливістю укладання на опорну поверхню опорної рами 1 (фіг. 1), так що рухомий каркас 2 охоплює робочі органи перевантажувальної машини. У робочому положенні опорна рама 1 прикріплена під перевантажувальною машиною, як показано на фіг. 4, до нижньої площини її поворотної площадки вісьмома шпильками 3, так що опорна поверхня опорної рами 1 проходить паралельно нижній площини поворотної площадки перевантажувальної машини. Як показано на фіг. 5, у робочому положенні опорна рама 1 розташована вище рівня підлоги реакторного залу настільки, що не може бути ушкоджена виступаючими над підлогою елементами відбортовки периметра зони обслуговування при зближенні робочих органів зі стінками 10 басейну витримки або шахти реактора. Як показано на фіг. 2, по зовнішній периферії пропонованої системи рівномірно розподілені вісім ультразвукових датчиків 6, призначених для формування сигналу для вповільнення 2 UA 102881 C2 5 10 15 20 25 30 35 40 45 50 55 60 переміщення перевантажувальної машини при наближенні її робочих органів до стінки 10 басейну на відстань, що уступає заданій відстані. Кожний датчик 6 закріплений на опорній рамі 1 за допомогою відповідного йому кронштейна з можливістю переміщення в радіальному напрямку. Датчики 6 виконані у вигляді комбінованих випромінювача й приймача ультразвукових сигналів. При наближенні робочих органів до стінки 10 басейну витримки або шахти реактора на певну відстань датчики 6 формують сигнал, що надходить у систему керування перевантажувальної машини для зменшення швидкості її переміщення до мінімальної. Кожний датчик 6 розміщений так, що випромінюваний ним ультразвуковий сигнал спочатку поширюється назовні паралельно площини опорної рами 1, а потім відбивається вниз відбивачем, виконаним на кронштейні, на якому датчик 6 закріплений. На фіг. 2 також показано чотири кінцеві вимикачі 4, використовувані для подачі керуючого сигналу на розмикання ланцюга силового живлення блоків керування електродвигунами й гальмовими пристроями перевантажувальної машини для її зупинення. Кінцеві вимикачі 4 рівномірно розподілені по периметру опорної рами 1, прикріплені до неї знизу, так що їхні розмикальні штовхачі проходять крізь отвори в опорній рамі 1 і впираються в нижню площину верхньої рами 7 рухомого каркаса 2, розміщеної на опорній рамі 1. Спрацьовування якогонебудь з кінцевих вимикачів 4 відбувається при відведенні верхньої рами 7 рухомого каркаса 2, яка притискає своєю вагою розмикальний штовхач відповідного кінцевого вимикача 4. Опорна рама 1 виконана з конструкційної сталі у формі плоского кільця. У деяких варіантах реалізації винаходу опорна рама 1 може бути виконана у формі іншої плоскої геометричної фігури підходящої форми, наприклад, овалу, багатокутника або зірки. Для полегшення виготовлення опорної рами 1, її транспортування й монтажу вона виконана з кількох частин, що скріплюються внахлест або по торцю підходящими засобами, наприклад накладними пластинами 5 (фіг.2) або зварюванням. Внутрішня частина опорної рами 1 виконана у вигляді профілю з опорною поверхнею й зовнішнім конічним пояском, який служить для центрування рухомого каркаса 2. В опорній поверхні виконано чотири радіальні вирізи (фіг.2) для встановлення у певному положенні рухомого каркаса 2 і запобігання його провертанню навколо своєї осі. Кожний кінцевий вимикач 4 прикріплений до опорної рами 1 за допомогою відповідної вертикальної полиці, яка додатково захищає його від можливих небажаних механічних впливів. У робочому положенні на опорну раму 1 опирається рухомий каркас 2, який своєю вагою давить на її опорну поверхню й центрується за рахунок наявності конічного пояска. При цьому верхня рама 7 рухомого каркаса 2 утримує натиснутими розмикальні штовхачі кінцевих вимикачів 4. Маса рухомого каркаса 2 вибирається достатньою для забезпечення втримання розмикальних штовхачів 3 натиснутими і вільного зрушення рухомого каркаса 2 при його взаємодії з перешкодою, таким як стінка 10 басейну витримки або шахти реактора. Для полегшення виготовлення рам 7, 8 рухомого каркаса 2, їхнього транспортування й монтажу, вони переважно виконані з кількох частин, скріплених внахлест або по торцю засобами, що походять, наприклад накладними пластинами 5, 12 або зварюванням. Верхня рама 7 рухомого каркаса 2 переважно виконана з конструкційної сталі й має спеціальну розточку, яка утворює внутрішній конічний поясок. Зазначеним пояском верхня рама 7 взаємодіє з відповідним конічним пояском опорної рами 1 для забезпечення центрування рухомого каркаса 2. У переважному варіанті реалізації винаходу форма верхньої рами 7 рухомого каркаса 2 подібна формі опорної рами 1. Нижня рама 8 рухомого каркаса 2 переважно виконана з конструкційної сталі або іншого пружного матеріалу й призначена для взаємодії з перешкодою, таким як стінка 10 басейну витримки або шахти реактора. В одному варіанті реалізації винаходу нижня рама 8 рухомого каркаса 2 розміщена паралельно верхній рамі 7, а сам рухомий каркас 2 має форму циліндра. Ще в одному варіанті реалізації винаходу площа, охоплювана нижньою рамою 8 рухомого каркаса 2 відрізняється від площі, охоплюваній верхньою рамою 7 рухомого каркаса 2, так що рухомий каркас 2 має форму зрізаного конуса, що розширюється вниз. Вверху кожної стійки 9 рухомого каркаса виконана підсилююча косинка, що проходить у радіальному напрямку верхньої рами 7 рухомого каркаса 2. Підсилююча косинка виконана у вигляді прямокутного трикутника, у якому довгий катет жорстко з'єднаний із зовнішньою стороною стійки 9, а короткий катет жорстко з'єднаний з нижньою стороною верхньої рами 7 рухомого каркаса 2. При використанні пропонованої системи за допомогою датчиків 6 забезпечується зменшення швидкості переміщення перевантажувальної машини при наближенні робочих органів до стінки 10 басейну витримки або шахти реактора. Для зупинення перевантажувальної 3 UA 102881 C2 5 10 15 20 25 30 машини використовуються кінцеві вимикачі 4. Колений кінцевий вимикач 4 встановлений так, що його розмикальний штовхач проходить вертикально вверх крізь отвір в опорній рамі 1 і притиснутий у робочому положенні верхньою рамою 7 рухомого каркаса 2. Кінцеві вимикачі 4 настроєні так, що відхилення верхньої рами 7 рухомого каркаса 2 на певний кут у будь-яку сторону, яке відповідає зсуву нижньої рами 8 рухомого каркаса 2 на 5 мм, призведе до вивільнення розмикального штовхача щонайменше одного з кінцевих вимикачів 4. При динамічній взаємодії нижньої рами 8 рухомого каркаса 2 з перешкодою 10 відбувається зсув рухомого каркаса 2, що викликає спрацьовування щонайменше одного з кінцевих вимикачів 4 і формування сигналу на зупинення перевантажувальної машини. Для відведення перевантажувальної машини від перешкоди 10 використовується ручний привод або спеціальний режим системи керування, який деблокує пристрій керування електродвигуном, а привод може працювати тільки на мінімальній швидкості. При відведенні перевантажувальної машини від перешкоди 10 рухомий каркас 2 під дією власної ваги вертається у вихідне положення й притискає розмикальний штовхач кінцевого вимикача 4, що спрацював. Таким чином, у пропонованій системі захист робочих органів перевантажувальної машини для перевантаження ядерного палива від зіткнення з перешкодою забезпечується зменшення швидкості переміщення робочого органа при його наближенні до перешкоди, що дозволяє зменшити ризик небезпечного зіткнення робочого органа з перешкодою й уникнути різких змін навантажень на привод перевантажувальної машини. Також забезпечується можливість зупинення робочого органа при його наближенні до перешкоди на мінімальну припустиму відстань. Підвищена надійність спрацьовування пропонованої системи й захисту робочого органа перевантажувальної машини від зіткнення з перешкодою досягається завдяки використанню двох різних каналів подачі сигналу керування, заснованих на різних фізичних принципах, для зменшення швидкості переміщення перевантажувальної машини і її зупинення, відповідно. При використанні описаної системи в умовах, у яких не потрібна підвищена надійність її спрацьовування, для забезпечення зменшення швидкості переміщення перевантажувальної машини та її зупинення може використовуватися тільки один канал подачі сигналу керування, заснований на використанні ультразвукових датчиків або кінцевих вимикачів. У такому випадку пропонована система може бути реалізована без рухомого каркаса або кронштейнів, відповідно. ФОРМУЛА ВИНАХОДУ 35 40 45 50 55 1. Система для захисту від зіткнення з перешкодою робочих органів перевантажувальної машини для перевантаження ядерного палива, що містить датчики (6) положення, розміщені по периферії робочих органів, яка відрізняється тим, що вона містить опорну раму (1), що має опорну поверхню і виконану з можливістю прикріплення під перевантажувальною машиною, рухомий каркас (2), що містить верхню раму (7), розміщену з опорою на опорну поверхню опорної рами (1), і нижню раму (8), з'єднану з верхньою рамою (7), так що рухомий каркас (2) охоплює собою робочі органи перевантажувальної машини, і кінцеві вимикачі (4), прикріплені до опорної рами (1) і виконані з можливістю формування сигналу для зупинення перевантажувальної машини при зсуві рухомого каркаса (2), розміщеного на опорній рамі (1), причому датчики (6) положення розміщені на деякій відстані від робочих органів у радіальному напрямку. 2. Система за п. 1, яка відрізняється тим, що датчики (6) положення розподілені по зовнішній периферії опорної рами (1) рівномірно. 3. Система за п. 1, яка відрізняється тим, що кожний датчик положення закріплений на опорній рамі (1) за допомогою відповідного йому кронштейна з можливістю переміщення в радіальному напрямку. 4. Система за п. 1, яка відрізняється тим, що датчики (6) положення виконані у вигляді комбінованих випромінювача й приймача ультразвукових сигналів. 5. Система за п. 1, яка відрізняється тим, що датчики (6) положення розміщені так, що випромінюваний ними ультразвуковий сигнал спочатку поширюється назовні паралельно площини опорної рами (1), а потім відбивається вниз відбивачем, закріпленим на зазначеному кронштейні. 6. Система за п. 1, яка відрізняється тим, що кронштейн і відбивач виконані як одне ціле. 7. Система за п. 1, яка відрізняється тим, що внутрішня частина опорної рами (1) виконана із зовнішнім конічним пояском. 4 UA 102881 C2 5 10 15 20 8. Система за п. 1, яка відрізняється тим, що опорна поверхня опорної рами (1) розміщена паралельно нижній площині поворотної площадки перевантажувальної машини для перевантаження ядерного палива. 9. Система за п. 1, яка відрізняється тим, що кінцеві вимикачі прикріплені до опорної рами (1) знизу, так що їхні розмикальні штовхачі проходять крізь отвори в опорній рамі (1) і впираються в нижню площину верхньої рами (7) рухомого каркаса (2), розміщеної на опорній рамі (1). 10. Система за п. 1, яка відрізняється тим, що нижня рама (8) рухомого каркаса (2) з'єднана з верхньою рамою (7) стійками (9). 11. Система за п. 10, яка відрізняється тим, що кожна стійка (9) містить косинку підсилення, виконану у вигляді прямокутного трикутника, у якому один катет жорстко з'єднаний із зовнішньою стороною стійки (9), а інший катет жорстко з'єднаний з нижньою стороною верхньої рами (7) рухомого каркаса (2). 12. Система за п. 1, яка відрізняється тим, що форма верхньої рами (7) рухомого каркаса (2) подібна формі опорної рами (1). 13. Система за п. 1, яка відрізняється тим, що нижня рама (8) рухомого каркаса (2) розміщена паралельно його верхній рамі (7). 14. Система за п. 13, яка відрізняється тим, що площа, охоплювана нижньою рамою (8) рухомого каркаса (2), відрізняється від площі, охоплюваної верхньою рамою (7) рухомого каркаса (2). 15. Система за п. 14, яка відрізняється тим, що площа, охоплювана нижньою рамою (8) рухомого каркаса (2), перевершує площу, охоплювану верхньою рамою (7) рухомого каркаса (2). 5 UA 102881 C2 6 UA 102881 C2 7 UA 102881 C2 8 UA 102881 C2 Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 9
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for the protection of fuel-handling machine actuating device against collision with obstacle
Автори англійськоюFedosovskyi Mykhailo Yevhenovych, Nikolaiev Viachieslav Viktorovich, Dunaiev Vadym Ihorovych, Iholkin Vitalii Alekseevich
Назва патенту російськоюСистема защиты рабочего органа перегрузочной машины от столкновения с препятствием
Автори російськоюФедосовский Михаил Евгеньевич, Николаев Вячеслав Викторович, Дунаев Вадим Игоревич, Иголкин Виталий Алексеевич
МПК / Мітки
МПК: G21C 19/00
Мітки: зіткнення, перевантажувальної, машини, захисту, органа, система, перешкодою, робочого
Код посилання
<a href="https://ua.patents.su/11-102881-sistema-dlya-zakhistu-robochogo-organa-perevantazhuvalno-mashini-vid-zitknennya-z-pereshkodoyu.html" target="_blank" rel="follow" title="База патентів України">Система для захисту робочого органа перевантажувальної машини від зіткнення з перешкодою</a>
Механізм повороту робочого органа дорожньо-прибиральної машини
Номер патенту: 72598
Опубліковано: 15.03.2005
Автори: Алпатов Сєргєй Міхайловіч, Єльцов Алєксандр Сєргєєвіч, Мінасов Андрєй Ашотовіч, Зєлєнін Олєг Павловіч
Мітки: органа, дорожньо-прибиральної, машини, повороту, механізм, робочого
Формула / Реферат:
1. Механізм повороту робочого органа дорожньо-прибиральної машини, який містить раму, що встановлюється на шасі машини, і гідроциліндр, одним кінцем з'єднаний з рамою, який відрізняється тим, що він додатково містить каретку, встановлену на рамі з можливістю переміщення вздовж рами і з'єднану з іншим кінцем гідроциліндра, принаймні один кронштейн із закріпленою на ньому плитою кріплення робочого органа, і важіль, шарнірно з'єднаний з верхньою...
Механізм навішення робочого органа дорожньо-прибиральної машини
Номер патенту: 72599
Опубліковано: 15.03.2005
Автори: Алпатов Сєргєй Міхайловіч, Мінасов Андрєй Ашотовіч, Єльцов Алєксандр Сєргєєвіч, Зєлєнін Олєг Павловіч
Мітки: робочого, органа, дорожньо-прибиральної, машини, механізм, навішення
Формула / Реферат:
1. Механізм навішення робочого органа дорожньо-прибиральної машини, що містить штовхальні важелі та гідроциліндри підйому-опускання, який відрізняється тим, що він виконаний керованим, з можливістю одночасного регулювання його положення в поперечному до руху машини і вертикальному напрямках, встановлений під кабіною на лонжеронах рами і додатково містить опорні важелі, балку з установленою на ній стикувальною плитою з можливістю переміщення...
Пристрій для зміни положення робочого органа землерийної машини
Номер патенту: 17333
Опубліковано: 15.09.2006
Автори: Пінчук Микола Іванович, Іванчук Михайло Іванович, Харченко Микола Михайлович, Сергеєв Сергій Гаврилович
Мітки: положення, зміни, землерийної, органа, пристрій, машини, робочого
Формула / Реферат:
Пристрій для зміни положення робочого органа землерийної машини, що містить базову раму, у вертикальній площині якої знаходяться дві напрямні, на яких з можливістю пересування по горизонталі встановлена рухома каретка з поворотною колонкою гідроциліндрами повороту колонки, який відрізняється тим, що каретка має верхній, нижній та розташований між ними середній кронштейни, поворотна колонка закріплена в співвісних отворах верхнього та нижнього...
Спосіб визначення тиску робочого органа плодозбиральної машини на кору
Номер патенту: 55809
Опубліковано: 15.04.2003
Автори: Ріпка Іван Іванович, Паславський Ростислав Ігорович, Крупич Олег Михайлович, Шевчук Роман Степанович, Миронюк Олег Сергійович, Семен Ярослав Васильович
МПК: G01N 33/46
Мітки: кору, спосіб, робочого, плодозбиральної, органа, визначення, машини, тиску
Формула / Реферат:
Спосіб визначення тиску робочого органа плодозбиральної машини на кору, за яким датчик тиску закріплюють на поверхні кори, який відрізняється тим, що додатково охоплюють поверхню кори еластичною накладкою, датчик тиску монтують в його проріз, причому розміри прорізу відповідають розмірам датчика, товщина накладки на порядок менша від товщини еластичної подушки робочого органа плодозбиральної машини, а коефіцієнти жорсткості накладки та...
Навісне обладнання робочого органа землерийної машини обертальної дії

Номер патенту: 65107
Опубліковано: 25.11.2011
Автори: Пелевін Леонід Євгенійович, Фомін Анатолій Вікторович, Давиденко Максим Анатолійович
МПК: E02F 5/30
Мітки: машини, обладнання, органа, навісне, обертальної, дії, землерийної, робочого
Формула / Реферат:
Навісне обладнання робочого органа землерийної машини обертальної дії, що містить дисковий робочий орган з ріжучими елементами та транспортуючими, встановленими пружно, яке відрізняється тим, що в нижній частині стійки розташований двигун обертальної дії, до вихідного вала якого через з'єднувальну муфту під'єднано приводний вал, до протилежного кінця якого з можливістю вільного обертання навколо нього встановлений своєю тильною частиною...
Попередній патент: Іонні рідини на основі дичетвертинних амонієвих солей – похідних морфоліну – як компоненти рідких і полімерних електролітів для електрохімічних пристроїв
Наступний патент: Спосіб отримання сульфату натрію при переробці лому свинцево-кислотних акумуляторів
Випадковий патент: Ведучий шків