Спосіб діагностики ефективності роботи робочих лопаток газотурбінного двигуна
Номер патенту: 112586
Опубліковано: 26.12.2016
Автори: Письменний Володимир Іванович, Журавльов Володимир Миколайович

Формула / Реферат
1. Спосіб діагностики ефективності роботи робочих лопаток газотурбінного двигуна, що включає вимірювання пульсацій статичного тиску за робочим колесом для подальшої обробки сигналу тиску у фазовій області, який відрізняється тим, що ефективність роботи робочих лопаток під експлуатаційним навантаженням визначають шляхом порівняння експлуатаційних значень функції лінійної деформації ![]() кінця пера кожної лопатки, що діагностується, у фазовій області обробки сигналу тиску, обчислених на основі функції збільшення повної фази
кінця пера кожної лопатки, що діагностується, у фазовій області обробки сигналу тиску, обчислених на основі функції збільшення повної фази ![]() сигналу частоти проходження лопаток на інтервалі часу, кратному періоду
сигналу частоти проходження лопаток на інтервалі часу, кратному періоду ![]() вибірки, з максимальними значеннями згаданої функції лінійної деформації
вибірки, з максимальними значеннями згаданої функції лінійної деформації ![]() кінця пера робочих лопаток, що раніше визначились у нормативних документах припустимими технічними й експлуатаційними характеристиками лопаток робочого колеса.
кінця пера робочих лопаток, що раніше визначились у нормативних документах припустимими технічними й експлуатаційними характеристиками лопаток робочого колеса.
2. Спосіб діагностики за п. 1, який відрізняється тим, що для лопаток, що діагностуються, попередньо визначають період ![]() обертання вала робочого колеса й частоту
обертання вала робочого колеса й частоту ![]() його обертання, паралельно розраховують частоту проходження робочих лопаток
його обертання, паралельно розраховують частоту проходження робочих лопаток ![]() , де
, де ![]() - кількість лопаток робочого колеса, потім з датчика сигналу тиску, який установлюють на корпусі двигуна поблизу робочого колеса за робочими лопатками, знімають сигнал тиску
- кількість лопаток робочого колеса, потім з датчика сигналу тиску, який установлюють на корпусі двигуна поблизу робочого колеса за робочими лопатками, знімають сигнал тиску ![]() , де
, де ![]() - поточний час, для визначення функції лінійної деформації
- поточний час, для визначення функції лінійної деформації ![]() кінця пера кожної лопатки, що діагностується, за допомогою генератора синусних і косинусних сигналів формують синусні
кінця пера кожної лопатки, що діагностується, за допомогою генератора синусних і косинусних сигналів формують синусні ![]() й косинусні
й косинусні ![]() сигнали, частоти яких строго дорівнюють розрахованій частоті проходження робочих лопаток
сигнали, частоти яких строго дорівнюють розрахованій частоті проходження робочих лопаток ![]() , а фази зсунуті між собою на кут 90°,
, а фази зсунуті між собою на кут 90°,
одночасно, використовуючи генератор сигналів частоти вибірки, формують сигнал вибірки ![]() , частота якого
, частота якого ![]() більше частоти проходження робочих лопаток
більше частоти проходження робочих лопаток ![]() у двадцять разів,
у двадцять разів, ![]() , а період
, а період ![]() визначається як величина обернено пропорційна величині частоти вибірки,
визначається як величина обернено пропорційна величині частоти вибірки, ![]() , потім, використовуючи аналого-цифрові перетворювачі, аналізований сигнал
, потім, використовуючи аналого-цифрові перетворювачі, аналізований сигнал ![]() з датчика сигналу тиску, синусні
з датчика сигналу тиску, синусні ![]() й косинусні
й косинусні ![]() сигнали дискретизують із частотою вибірки
сигнали дискретизують із частотою вибірки ![]() , рівномірно квантують і вибирають аналізований сигнал на інтервалі часу
, рівномірно квантують і вибирають аналізований сигнал на інтервалі часу ![]() , що дорівнює періоду обертання вала робочого колеса, потім, використовуючи обчислювальний засіб, дискретизований аналізований сигнал
, що дорівнює періоду обертання вала робочого колеса, потім, використовуючи обчислювальний засіб, дискретизований аналізований сигнал ![]() множать на дискретизовані сигнали синусних
множать на дискретизовані сигнали синусних ![]() і конусних
і конусних ![]() сигналів, вибрані на інтервалі часу
сигналів, вибрані на інтервалі часу ![]() періоду обертання вала робочого колеса, одержуючи сигнали синусних
періоду обертання вала робочого колеса, одержуючи сигнали синусних ![]() і косинусних
і косинусних ![]() добутків сигналів тиску, які містять зміни фази сигналу частоти проходження лопаток
добутків сигналів тиску, які містять зміни фази сигналу частоти проходження лопаток ![]() , пропорційні лінійної деформації кінця пера
, пропорційні лінійної деформації кінця пера ![]() робочих лопаток, що діагностуються, кожний окремо сигнал синусних
робочих лопаток, що діагностуються, кожний окремо сигнал синусних ![]() і косинусних
і косинусних ![]() добутків сигналів тиску обробляють цифровими фільтрами третього порядку із частотою зрізу, рівною частоті проходження лопаток
добутків сигналів тиску обробляють цифровими фільтрами третього порядку із частотою зрізу, рівною частоті проходження лопаток ![]() , одержуючи відфільтровані сигнали синусного
, одержуючи відфільтровані сигнали синусного ![]() й косинусного
й косинусного ![]() добутків сигналів тиску, зсунуті один відносно одного на кут 90°, далі роблять обчислення функції повної фази
добутків сигналів тиску, зсунуті один відносно одного на кут 90°, далі роблять обчислення функції повної фази ![]() сигналу частоти проходження лопаток, яка відображає динаміку зміни статичного кута установки лопаток
сигналу частоти проходження лопаток, яка відображає динаміку зміни статичного кута установки лопаток ![]() через інтервали часу
через інтервали часу ![]() , відповідні періоду вибірки, на інтервалі часу періоду
, відповідні періоду вибірки, на інтервалі часу періоду ![]() обертання вала робочого колеса:
обертання вала робочого колеса:
![]()
де ![]() - величина відфільтрованого сигналу синусного добутку сигналу тиску;
- величина відфільтрованого сигналу синусного добутку сигналу тиску;
![]() - величина відфільтрованого сигналу косинусного добутку сигналу тиску,
- величина відфільтрованого сигналу косинусного добутку сигналу тиску,
після чого обчислюють значення функції лінійної деформації ![]() на радіусі
на радіусі ![]() кінця пера лопатки, що діагностується, на інтервалі часу
кінця пера лопатки, що діагностується, на інтервалі часу ![]() періоду обертання вала робочого колеса по формулі:
періоду обертання вала робочого колеса по формулі:
![]() .
.
Текст
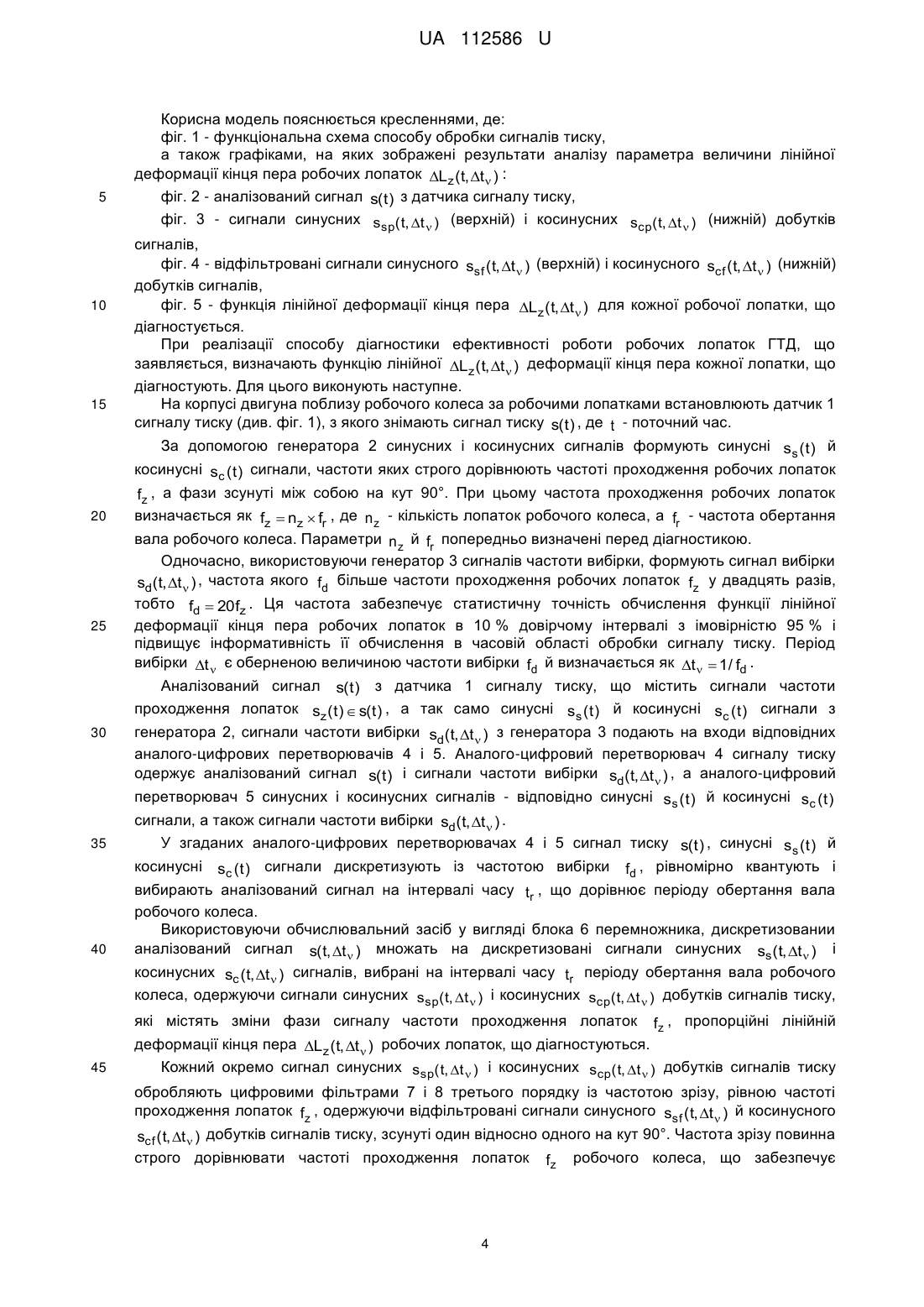
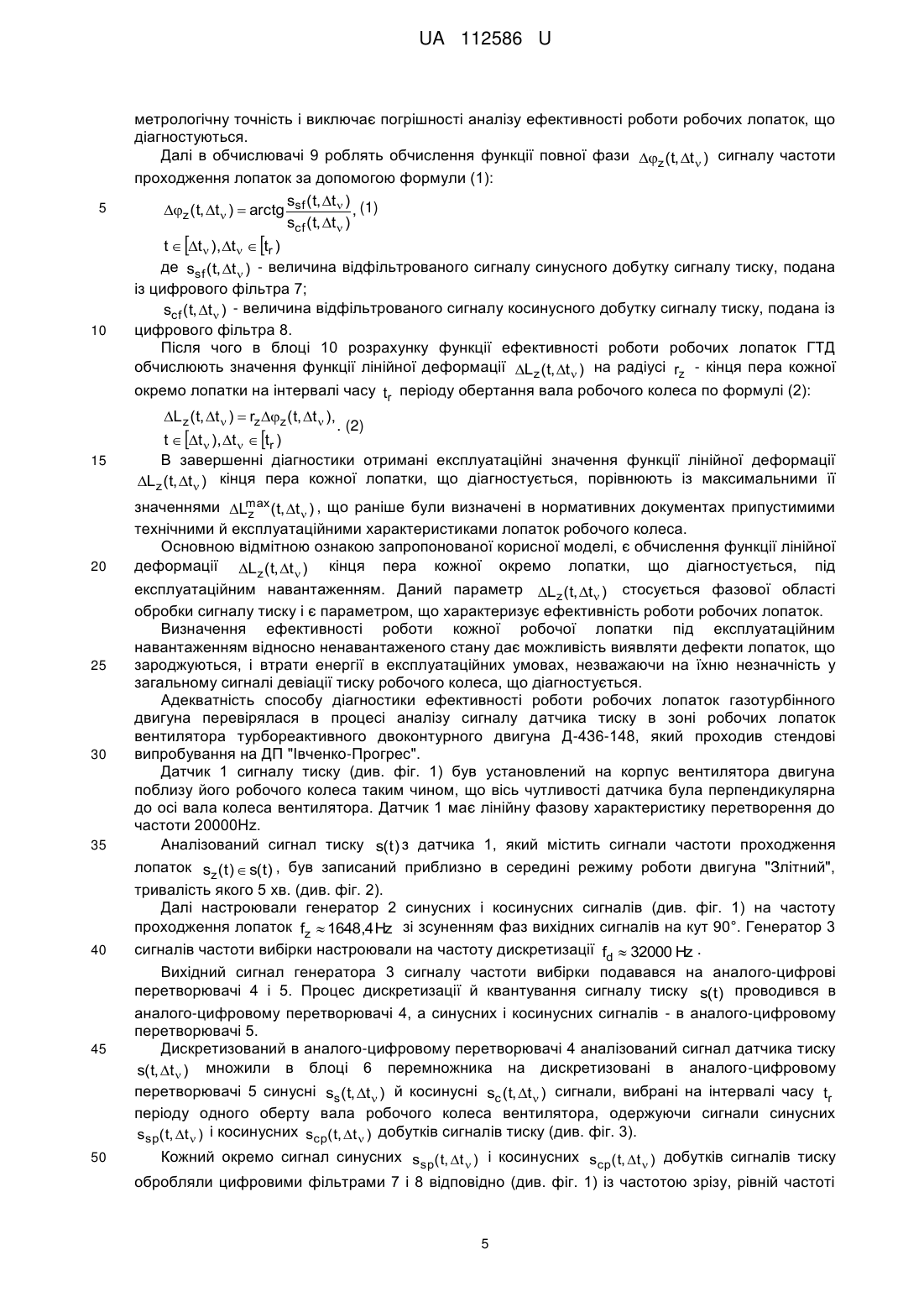
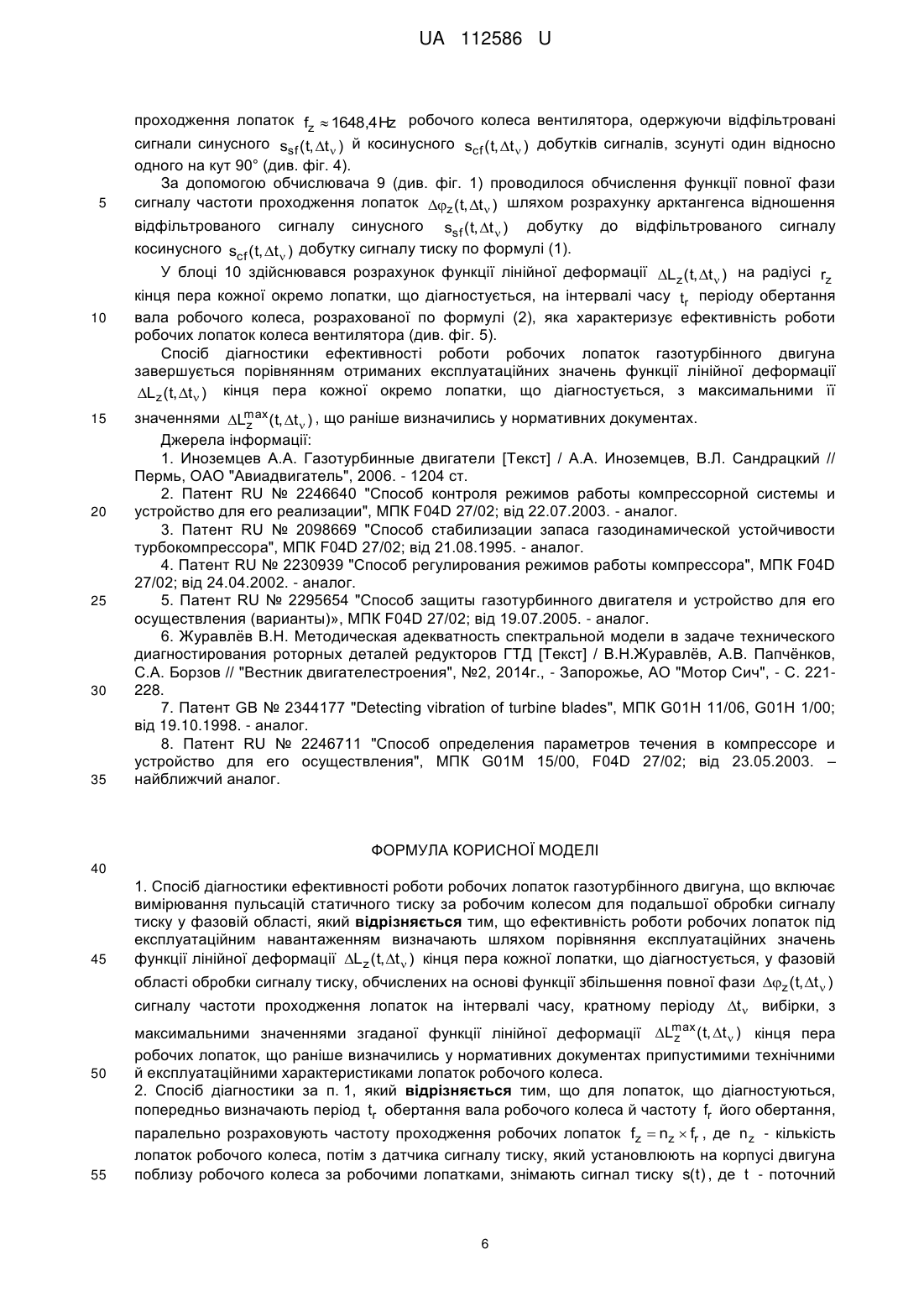
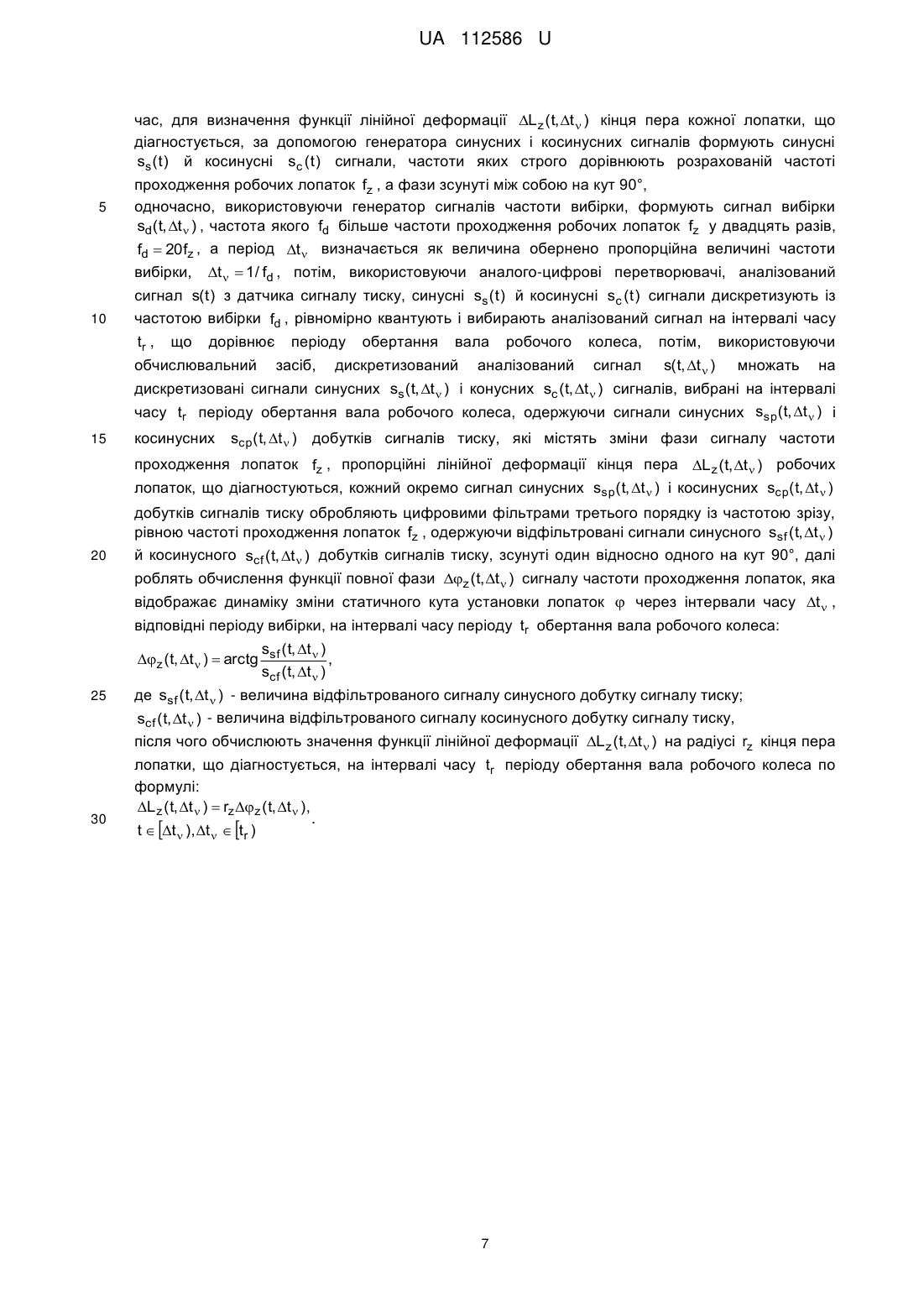
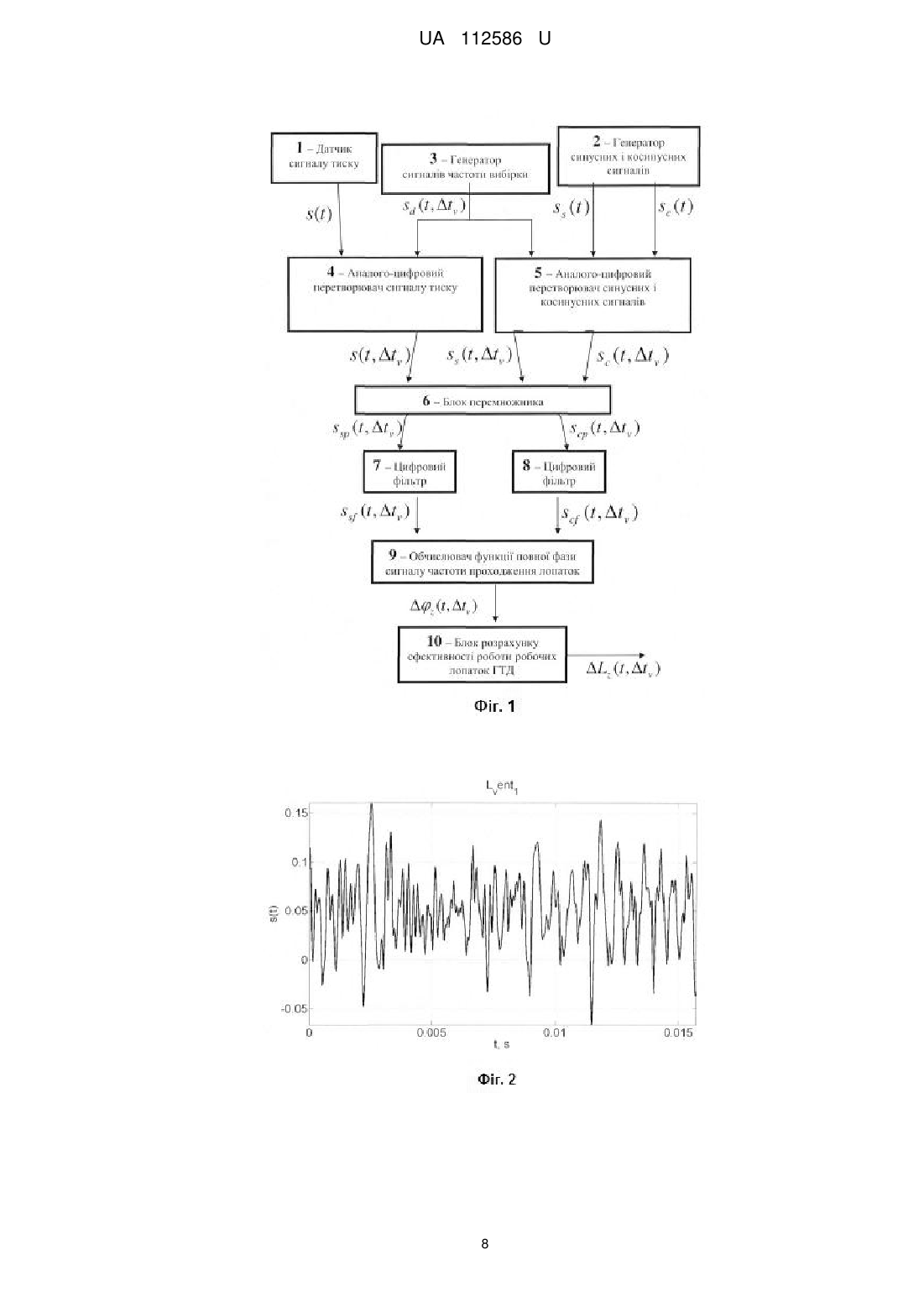
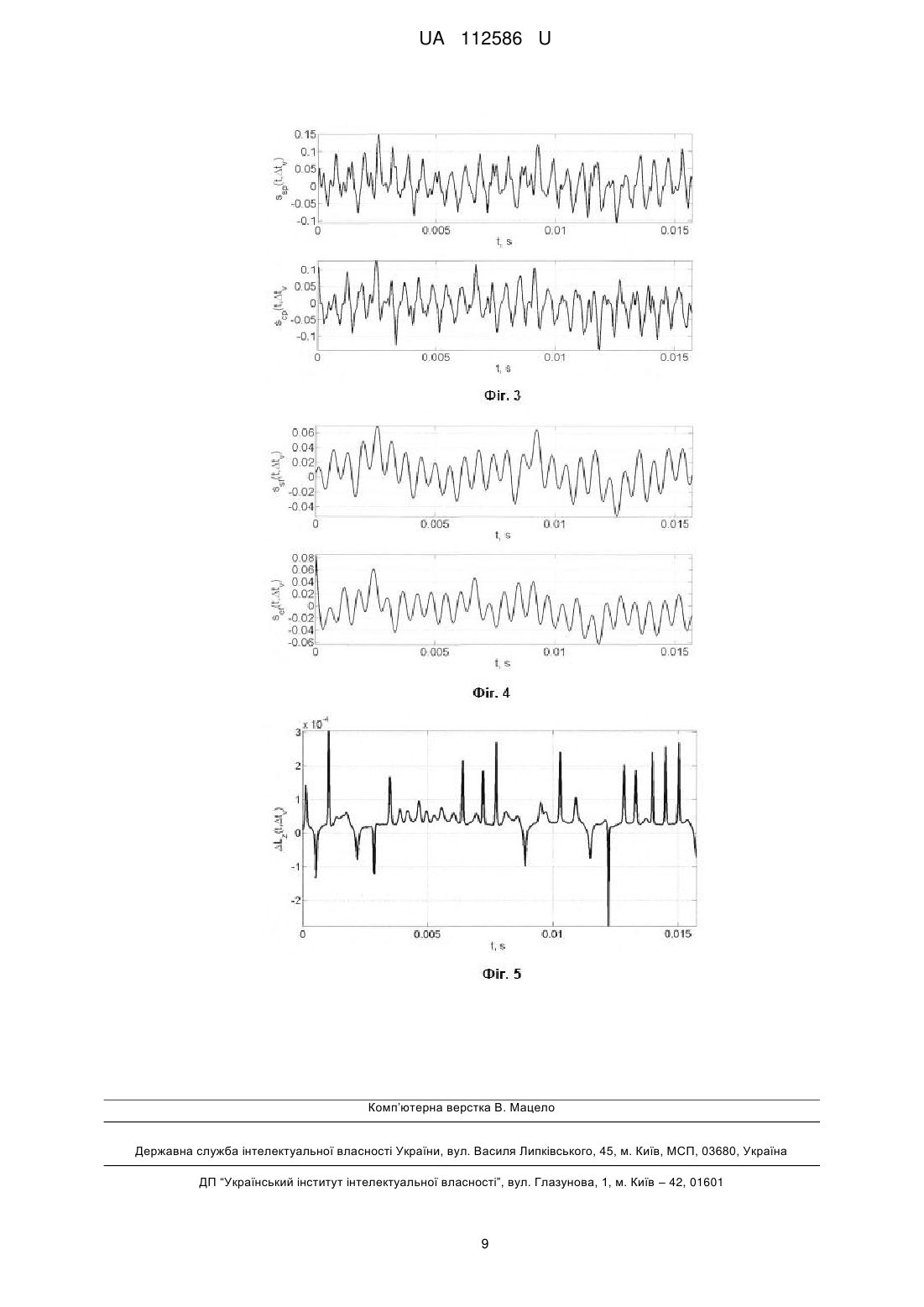
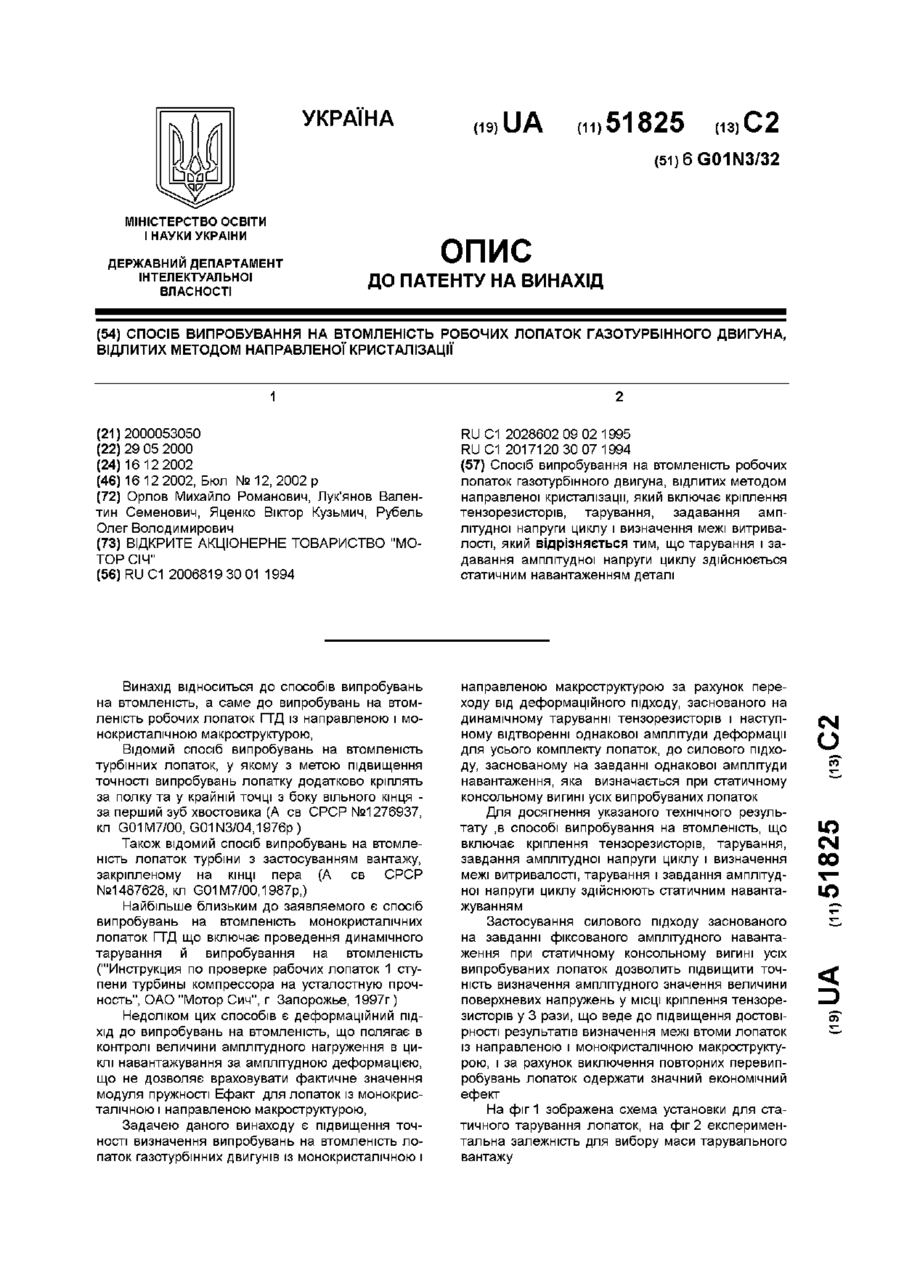
Реферат: Спосіб діагностики ефективності роботи робочих лопаток газотурбінного двигуна включає вимірювання пульсацій статичного тиску за робочим колесом для подальшої обробки сигналу тиску в фазовій області. Ефективність роботи робочих лопаток під експлуатаційним навантаженням визначають шляхом порівняння експлуатаційних значень функції лінійної деформації кінця пера кожної лопатки, що діагностується, у фазовій області обробки сигналу тиску, обчислених на основі функції збільшення повної фази сигналу частоти проходження лопаток на інтервалі часу, кратному періоду вибірки, з максимальними значеннями згаданої функції лінійної деформації кінця пера робочих лопаток, що раніше визначились у нормативних документах припустимими технічними й експлуатаційними характеристиками лопаток робочого колеса. UA 112586 U (12) UA 112586 U UA 112586 U 5 10 Запропонована корисна модель належить до області діагностики деталей машин і може мати широке застосування, зокрема, для діагностики найбільш напружених деталей газотурбінних двигунів (ГТД) - його робочих лопаток. Існує ряд способів діагностування стану лопаток у стендових і експлуатаційних умовах. Одним з ефективних методів експлуатаційного технічного діагностування стану робочих лопаток ГТД є метод обробки сигналів тиску. При цьому застосовуються різні способи обробки згаданих сигналів: у часовій області обробки сигналу тиску; у частотній області обробки сигналу тиску; у фазовій області обробки сигналу тиску. До першого способу обробки сигналів тиску можна віднести метод інтегрального аналізу, що полягає у визначенні відношення тиску загальмованого потоку повітря на виході з компресора P* * * * * PK до тиску загальмованого потоку на вході в компресор Pin , тобто параметра k K , де k * Pin ступінь підвищення повного тиску в компресорі [1, ст. 220]. Описуваний традиційний метод 15 20 25 30 35 40 45 50 * діагностики параметра k переважно ґрунтується на аналізі інформаційного сигналу усередненого, на деякому інтервалі часу вікна аналізу Ta , яке визначається десятками періодів tr обертання вала компресора. Вимір тиску виконують шляхом установки двох манометрів на вході й виході ступеня компресора. Недоліком даного способу є висока вартість препарування двигуна, а також погрішність, обумовлена постійними часу Ta й ваговою функцією манометрів, яка визначає їхню швидкодію. До цього ж способу обробки сигналів тиску можна віднести "Спосіб контролю режимів роботи компресорної системи й пристрій для його реалізації" [2]. Він полягає в тому, що встановлюють по потоці в горлі міжлопатного каналу спрямного апарата останнього ступеня компресора насадок для виміру повного й донного тисків, вимірюють величину різниці між повним і донним тисками, визначають величину математичного очікування (у просторі часу) донного тиску за часом осереднення (0,1 0,2)проц , де проц - постійна часу контрольованого перехідного процесу. Недоліком способу є низька точність контролю, обумовлена стохастичністю турбулентних процесів у зоні вимірів параметрів і, природно, стохастичною девіацією основного параметра постійної часу контрольованого перехідного процесу проц . До другого способу обробки сигналів тиску можна віднести ряд патентів, серед яких "Спосіб стабілізації запасу газодинамічної стійкості турбокомпресора" [3]. У даному патенті як параметри тиску використовують спектральні складові пульсацій тиску, вимірюваного не менш ніж у двох точках по окружному напрямку проточної частини турбокомпресора, по яких формується сигнал керування, порівнюваний із граничним значенням. Частоти спектральних складових порівнюють із частотою обертання ротора. Після чого амплітудно-частотні характеристики, частоти яких є цілократними до частоти обертання ротора, використовуються як перший компонент сигналу керування. При цьому зсув фаз між спектральними складовими, не кратними частоті обертання ротора, використовують як другий компонент сигналу керування. Отриманий двокомпонентний сигнал керування потім порівнюють із граничним значенням, що є функцією частоти обертання ротора. Відомий "Спосіб регулювання режимів роботи компресора" [4], що полягає у вимірі параметра коливань тиску в його проточній частині й формуванні сигналів керування, де пропонується в діапазоні можливих режимів роботи компресора визначати в координатах газодинамічних характеристик (абсциса) і (ордината) базову границю виникнення обертового зриву баз f (баз ) , використовуючи як сигнал по обертовому зриву максимум автокореляційної функції параметра коливань тиску. Після чого через інтервал часу ( ) , який вибирають за умовами експлуатації компресора в діапазоні nсеку нд годин , визначають зсув m режиму виникнення обертового зриву щодо базової границі по співвідношенню i i баз (i ) . Потім абсциси точки робочого режиму й лінії настроювання систем протипомпажного регулювання й захисту, що мали місце при і-тому виклику, зміщають на величину i f (i ) , відповідну зміні запасу по помпажу, що мав місце при зсуві i . Відомий "Спосіб захисту газотурбінного двигуна й пристрій для його здійснення (варіанти)" [5]. У даному способі вимірюють тиски за останнім ступенем компресора двигуна й 1 UA 112586 U 5 10 15 20 25 30 35 40 45 50 55 60 перетворюють, отриманий аналоговий сигнал у реальному часі в електричний сигнал, відповідний величині відношення амплітуди коливань поточного тиску до його середнього значення. Електричний сигнал послідовно порівнюють із попередньо заданими власним критерієм для типу втрати стійкості, у вигляді діапазону частот контрольованого параметра, і граничною величиною спрацьовування, у вигляді граничного значення відношення амплітуди коливань тиску до середнього значення. Отримані по результату порівняння сигнали наявності режиму зриву, подають на виконавчі механізми двигуна відповідно до типу втрати стійкості для відбивання до виходу двигуна з режиму зриву. Недоліком зазначених способів є те, що сигнали керування формуються після появи ознак початку втрати стійкості течії в компресорі, тобто початку формування в ньому обертового зриву, що проявляється в спектрі у вигляді гармонік на частоті, меншій й не кратній частоті обертання робочого колеса. На формування сигналів керування потрібен час, порівнянний з часом виникнення й існування зривних явищ у компресорі, зокрема зриву, що обертається. Це створює можливість втрати газодинамічної стійкості компресора. Ще одним недоліком способів обробки сигналу тиску в спектральній області є нестаціонарність оброблюваного сигналу на інтервалі часу вікна аналізу, що обумовлена стохастичністю турбулентних процесів у зоні вимірів параметрів. Цей факт приводить до великої дисперсії інформаційного параметра в часовій області. Інтегрування інформаційного сигналу на інтервалі часу вікна аналізу виключає ідентифікацію контролю кожної лопатки компресора [6]. До третього способу обробки сигналів тиску можна віднести "Визначення характеристик вібрацій турбінних лопаток" [7]. Спосіб моніторингу лопатки турбіни, який полягає у вимірюванні часу повернення лопатки в первісний стан після проходження нею безлічі обертів, при якому зміна минулого часу між послідовними проходами використовується для визначення наявності вібрації. У розглянутому способі використовується ємнісний зонд для генерації вихідного імпульсу при кожному проході лопатки. При цьому розглядаються фазові варіації результуючого сигналу. Дані аналізуються за допомогою диференціації, фітингу з поліноміальної функції до виходу зонда й шляхом використання перетворення Фур'є для одержання частотної й фазової інформації. Недоліком даного способу є те, що застосування перетворення Фур'є, яке, у випадку нестаціонарного сигналу, породженого турбулентністю робочого тіла, має невизначену методичну погрішність [6]. Найбільш близьким аналогом до запропонованої корисної моделі, є спосіб визначення параметрів течії в компресорі й пристрій для його здійснення [8]. У даному способі використовують аналогову інформацію, що надходить із насадків для виміру пульсацій повного й статичного тиску, встановлених на вході й виході компресора, у блок визначення пульсацій швидкості, з одночасним виміром пульсацій тисків над лопатками робочого колеса й результатів виміру, що надходять у пристрій синхронного введення й реєстрації. Причому введення аналогових сигналів роблять за допомогою блока синхронного введення й реєстрації результатів виміру для наступної обробки швидкозмінних тисків, з можливістю побудови ізобар, що візуалізують структуру потоку в обертовому робочому колесі за час, відповідний часу проходження кожного міжлопатного каналу й кожної лопатки. При цьому всі виміри роблять синхронно, після чого визначають величини торцевих зазорів, обчислюють кути установки лопаток (у просторі фаз) і їх девіацію, а також швидкість потоку в абсолютному русі на вході й виході компресора. До недоліків найближчого аналога слід віднести апаратну (реалізація режиму синхронної обробки фаз сигналів потребує безліч датчиків) й обчислювальну складність визначення параметрів пульсацій потоку, який характеризується явно вираженою турбулентністю, що впливає на абсолютну точність розрахунку торцевих зазорів і швидкості потоку на вході й виході компресора. Аналіз графіків, наведених у патенті, дозволяє зробити висновок про точність методу гірше 5 %. Згадування в описі патенту, що розглядається, блока візуалізації результатів виміру, дозволяє зробити висновок, що метод призначений для роботи в стендових умовах, припускає обробку результатів оператором стенда й не допускає експлуатаційного застосування. Задачею запропонованої корисної моделі є створення способу діагностики ефективності роботи робочих лопаток ГТД, за допомогою якого можливо виявляти дефекти лопаток, що зароджуються, і втрати енергії на частотах кратних частоті проходження лопаток у стендових і експлуатаційних умовах. Поставлена задача вирішується тим, що в способі діагностики ефективності роботи робочих лопаток газотурбінного двигуна вимірюють пульсації статичного тиску за робочим колесом для подальшої обробки сигналу тиску в фазовій області, згідно з корисною моделлю, ефективність 2 UA 112586 U роботи робочих лопаток під експлуатаційним навантаженням визначають шляхом порівняння експлуатаційних значень функції лінійної деформації Lz (t, t ) кінця пера кожної лопатки, що діагностується, у фазовій області обробки сигналу тиску, обчислених на основі функції збільшення повної фази z (t, t ) сигналу частоти проходження лопаток на інтервалі часу 5 кратному періоду t вибірки, з максимальними значеннями згаданої функції лінійної деформації Lmax ( t, t ) кінця пера робочих лопаток, що раніше визначились у нормативних z документах припустимими технічними й експлуатаційними характеристиками лопаток робочого колеса. Для лопаток, що діагностуються, попередньо визначають період tr обертання вала 10 робочого колеса й частоту fr його обертання. При цьому паралельно розраховують частоту проходження робочих лопаток fz nz fr , де n z - кількість лопаток робочого колеса. Потім з датчика сигналу тиску, який установлюють на корпусі двигуна поблизу робочого колеса за робочими лопатками, знімають сигнал тиску s(t ) де t - поточний час. Для визначення функції лінійної деформації Lz (t, t ) кінця пера кожної лопатки, що діагностується, за допомогою 15 генератора синусних і косинусних сигналів формують синусні ss (t ) й косинусні sc (t ) сигнали, частоти яких строго дорівнюють розрахованій частоті проходження робочих лопаток fz , а фази зсунуті між собою на кут 90°. Одночасно, використовуючи генератор сигналів частоти вибірки, формують сигнал вибірки sd(t, t ) , частота якого fd більше частоти проходження робочих 20 лопаток fz у двадцять разів, fd 20fz , а період t визначається як t 1/ fd . Потім, використовуючи аналого-цифрові перетворювачі, аналізований сигнал s(t ) з датчика сигналу тиску, синусні ss (t ) й косинусні sc (t ) сигнали дискретизують із частотою вибірки fd , рівномірно квантують і вибирають аналізований сигнал на інтервалі часу tr , що дорівнює періоду обертання вала робочого колеса. Потім, використовуючи обчислювальний засіб, дискретизованний аналізований сигнал s( t, t ) множать на дискретизовані сигнали синусних 25 ss (t, t ) і косинусних sc (t, t ) сигналів, вибрані на інтервалі часу tr періоду обертання вала робочого колеса, одержуючи сигнали синусних ssp( t, t ) і косинусних scp( t, t ) добутків сигналів тиску, які містять зміни фази сигналу частоти проходження лопаток fz , пропорційні лінійної деформації кінця пера Lz (t, t ) робочих лопаток, що діагностуються. Кожний окремо сигнал синусних ssp( t, t ) і косинусних scp( t, t ) добутків сигналів тиску обробляють 30 цифровими фільтрами третього порядку із частотою зрізу, рівною частоті проходження лопаток fz , одержуючи відфільтровані сигнали синусного ssf (t, t ) й косинусного scf (t, t ) добутків сигналів тиску, зсунуті один відносно одного на кут 90°. Далі роблять обчислення функції повної фази z (t, t ) сигналу частоти проходження лопаток, яка відображає динаміку зміни статичного кута установки лопаток через інтервали часу t , відповідні періоду вибірки, на 35 інтервалі часу періоду tr обертання вала робочого колеса: s ( t, t ) z (t, t ) arctg sf , scf (t, t ) 40 45 t t ), t tr ) де ssf ( t, t ) - величина відфільтрованого сигналу синусного добутку сигналу тиску; scf (t, t ) - величина відфільтрованого сигналу косинусного добутку сигналу тиску. Після чого обчислюють значення функції лінійної деформації Lz (t, t ) на радіусі rz кінця пера лопатки, що діагностується, на інтервалі часу tr періоду обертання вала робочого колеса по формулі: Lz ( t, t ) rz z ( t, t ) . t t ), t tr ) Технічним результатом корисної моделі є підвищення точності й інформативності визначення параметрів експлуатаційної ефективності кожної робочої лопатки під експлуатаційним навантаженням відносно ненавантаженого стану за допомогою автоматичної системи аналізу технічного стану робочих лопаток ГТД. 3 UA 112586 U 5 10 15 20 25 Корисна модель пояснюється кресленнями, де: фіг. 1 - функціональна схема способу обробки сигналів тиску, а також графіками, на яких зображені результати аналізу параметра величини лінійної деформації кінця пера робочих лопаток Lz (t, t ) : фіг. 2 - аналізований сигнал s(t ) з датчика сигналу тиску, фіг. 3 - сигнали синусних ssp( t, t ) (верхній) і косинусних scp( t, t ) (нижній) добутків сигналів, фіг. 4 - відфільтровані сигнали синусного ssf ( t, t ) (верхній) і косинусного scf ( t, t ) (нижній) добутків сигналів, фіг. 5 - функція лінійної деформації кінця пера Lz (t, t ) для кожної робочої лопатки, що діагностується. При реалізації способу діагностики ефективності роботи робочих лопаток ГТД, що заявляється, визначають функцію лінійної Lz (t, t ) деформації кінця пера кожної лопатки, що діагностують. Для цього виконують наступне. На корпусі двигуна поблизу робочого колеса за робочими лопатками встановлюють датчик 1 сигналу тиску (див. фіг. 1), з якого знімають сигнал тиску s(t ) , де t - поточний час. За допомогою генератора 2 синусних і косинусних сигналів формують синусні ss (t ) й косинусні sc (t ) сигнали, частоти яких строго дорівнюють частоті проходження робочих лопаток fz , а фази зсунуті між собою на кут 90°. При цьому частота проходження робочих лопаток визначається як fz nz fr , де n z - кількість лопаток робочого колеса, a fr - частота обертання вала робочого колеса. Параметри n z й fr попередньо визначені перед діагностикою. Одночасно, використовуючи генератор 3 сигналів частоти вибірки, формують сигнал вибірки sd(t, t ) , частота якого fd більше частоти проходження робочих лопаток fz у двадцять разів, тобто fd 20fz . Ця частота забезпечує статистичну точність обчислення функції лінійної деформації кінця пера робочих лопаток в 10 % довірчому інтервалі з імовірністю 95 % і підвищує інформативність її обчислення в часовій області обробки сигналу тиску. Період вибірки t є оберненою величиною частоти вибірки fd й визначається як t 1/ fd . Аналізований сигнал 30 35 40 s(t ) з датчика 1 сигналу тиску, що містить сигнали частоти проходження лопаток sz (t ) s(t ) , а так само синусні ss (t ) й косинусні sc (t ) сигнали з генератора 2, сигнали частоти вибірки sd(t, t ) з генератора 3 подають на входи відповідних аналого-цифрових перетворювачів 4 і 5. Аналого-цифровий перетворювач 4 сигналу тиску одержує аналізований сигнал s(t ) і сигнали частоти вибірки sd(t, t ) , а аналого-цифровий перетворювач 5 синусних і косинусних сигналів - відповідно синусні ss (t ) й косинусні sc (t ) сигнали, а також сигнали частоти вибірки sd(t, t ) . У згаданих аналого-цифрових перетворювачах 4 і 5 сигнал тиску s(t ) , синусні ss (t ) й косинусні sc (t ) сигнали дискретизують із частотою вибірки fd , рівномірно квантують і вибирають аналізований сигнал на інтервалі часу tr , що дорівнює періоду обертання вала робочого колеса. Використовуючи обчислювальний засіб у вигляді блока 6 перемножника, дискретизовании аналізований сигнал s( t, t ) множать на дискретизовані сигнали синусних ss (t, t ) і косинусних sc (t, t ) сигналів, вибрані на інтервалі часу tr періоду обертання вала робочого колеса, одержуючи сигнали синусних ssp( t, t ) і косинусних scp( t, t ) добутків сигналів тиску, які містять зміни фази сигналу частоти проходження лопаток 45 fz , пропорційні лінійній деформації кінця пера Lz (t, t ) робочих лопаток, що діагностуються. Кожний окремо сигнал синусних ssp( t, t ) і косинусних scp( t, t ) добутків сигналів тиску обробляють цифровими фільтрами 7 і 8 третього порядку із частотою зрізу, рівною частоті проходження лопаток fz , одержуючи відфільтровані сигнали синусного ssf ( t, t ) й косинусного scf (t, t ) добутків сигналів тиску, зсунуті один відносно одного на кут 90°. Частота зрізу повинна строго дорівнювати частоті проходження лопаток 4 fz робочого колеса, що забезпечує UA 112586 U 5 10 метрологічну точність і виключає погрішності аналізу ефективності роботи робочих лопаток, що діагностуються. Далі в обчислювачі 9 роблять обчислення функції повної фази z (t, t ) сигналу частоти проходження лопаток за допомогою формули (1): s ( t, t ) (1) z (t, t ) arctg sf , scf (t, t ) t t ), t tr ) де ssf ( t, t ) - величина відфільтрованого сигналу синусного добутку сигналу тиску, подана із цифрового фільтра 7; scf (t, t ) - величина відфільтрованого сигналу косинусного добутку сигналу тиску, подана із цифрового фільтра 8. Після чого в блоці 10 розрахунку функції ефективності роботи робочих лопаток ГТД обчислюють значення функції лінійної деформації Lz (t, t ) на радіусі rz - кінця пера кожної окремо лопатки на інтервалі часу tr періоду обертання вала робочого колеса по формулі (2): L z ( t, t ) rz z ( t, t ), 15 20 25 30 35 40 45 50 . (2) t t ), t tr ) В завершенні діагностики отримані експлуатаційні значення функції лінійної деформації Lz (t, t ) кінця пера кожної лопатки, що діагностується, порівнюють із максимальними її значеннями Lmax ( t, t ) , що раніше були визначені в нормативних документах припустимими z технічними й експлуатаційними характеристиками лопаток робочого колеса. Основною відмітною ознакою запропонованої корисної моделі, є обчислення функції лінійної деформації Lz (t, t ) кінця пера кожної окремо лопатки, що діагностується, під експлуатаційним навантаженням. Даний параметр Lz (t, t ) стосується фазової області обробки сигналу тиску і є параметром, що характеризує ефективність роботи робочих лопаток. Визначення ефективності роботи кожної робочої лопатки під експлуатаційним навантаженням відносно ненавантаженого стану дає можливість виявляти дефекти лопаток, що зароджуються, і втрати енергії в експлуатаційних умовах, незважаючи на їхню незначність у загальному сигналі девіації тиску робочого колеса, що діагностується. Адекватність способу діагностики ефективності роботи робочих лопаток газотурбінного двигуна перевірялася в процесі аналізу сигналу датчика тиску в зоні робочих лопаток вентилятора турбореактивного двоконтурного двигуна Д-436-148, який проходив стендові випробування на ДП "Івченко-Прогрес". Датчик 1 сигналу тиску (див. фіг. 1) був установлений на корпус вентилятора двигуна поблизу його робочого колеса таким чином, що вісь чутливості датчика була перпендикулярна до осі вала колеса вентилятора. Датчик 1 має лінійну фазову характеристику перетворення до частоти 20000Hz. Аналізований сигнал тиску s(t ) з датчика 1, який містить сигнали частоти проходження лопаток sz (t ) s(t ) , був записаний приблизно в середині режиму роботи двигуна "Злітний", тривалість якого 5 хв. (див. фіг. 2). Далі настроювали генератор 2 синусних і косинусних сигналів (див. фіг. 1) на частоту проходження лопаток fz 1648,4 Hz зі зсуненням фаз вихідних сигналів на кут 90°. Генератор 3 сигналів частоти вибірки настроювали на частоту дискретизації fd 32000 Hz . Вихідний сигнал генератора 3 сигналу частоти вибірки подавався на аналого-цифрові перетворювачі 4 і 5. Процес дискретизації й квантування сигналу тиску s(t ) проводився в аналого-цифровому перетворювачі 4, а синусних і косинусних сигналів - в аналого-цифровому перетворювачі 5. Дискретизований в аналого-цифровому перетворювачі 4 аналізований сигнал датчика тиску s( t, t ) множили в блоці 6 перемножника на дискретизовані в аналого-цифровому перетворювачі 5 синусні ss (t, t ) й косинусні sc (t, t ) сигнали, вибрані на інтервалі часу tr періоду одного оберту вала робочого колеса вентилятора, одержуючи сигнали синусних ssp( t, t ) і косинусних scp( t, t ) добутків сигналів тиску (див. фіг. 3). Кожний окремо сигнал синусних ssp( t, t ) і косинусних scp( t, t ) добутків сигналів тиску обробляли цифровими фільтрами 7 і 8 відповідно (див. фіг. 1) із частотою зрізу, рівній частоті 5 UA 112586 U 5 проходження лопаток fz 1648,4 Hz робочого колеса вентилятора, одержуючи відфільтровані сигнали синусного ssf ( t, t ) й косинусного scf ( t, t ) добутків сигналів, зсунуті один відносно одного на кут 90° (див. фіг. 4). За допомогою обчислювача 9 (див. фіг. 1) проводилося обчислення функції повної фази сигналу частоти проходження лопаток z (t, t ) шляхом розрахунку арктангенса відношення відфільтрованого 10 15 20 25 30 35 сигналу синусного ssf ( t, t ) добутку до відфільтрованого сигналу косинусного scf ( t, t ) добутку сигналу тиску по формулі (1). У блоці 10 здійснювався розрахунок функції лінійної деформації Lz (t, t ) на радіусі rz кінця пера кожної окремо лопатки, що діагностується, на інтервалі часу tr періоду обертання вала робочого колеса, розрахованої по формулі (2), яка характеризує ефективність роботи робочих лопаток колеса вентилятора (див. фіг. 5). Спосіб діагностики ефективності роботи робочих лопаток газотурбінного двигуна завершується порівнянням отриманих експлуатаційних значень функції лінійної деформації Lz (t, t ) кінця пера кожної окремо лопатки, що діагностується, з максимальними її значеннями Lmax ( t, t ) , що раніше визначились у нормативних документах. z Джерела інформації: 1. Иноземцев А.А. Газотурбинные двигатели [Текст] / А.А. Иноземцев, В.Л. Сандрацкий // Пермь, ОАО "Авиадвигатель", 2006. - 1204 ст. 2. Патент RU № 2246640 "Способ контроля режимов работы компрессорной системы и устройство для его реализации", МПК F04D 27/02; від 22.07.2003. - аналог. 3. Патент RU № 2098669 "Способ стабилизации запаса газодинамической устойчивости турбокомпрессора", МПК F04D 27/02; від 21.08.1995. - аналог. 4. Патент RU № 2230939 "Способ регулирования режимов работы компрессора", МПК F04D 27/02; від 24.04.2002. - аналог. 5. Патент RU № 2295654 "Способ защиты газотурбинного двигателя и устройство для его осуществления (варианты)», МПК F04D 27/02; від 19.07.2005. - аналог. 6. Журавлёв В.Н. Методическая адекватность спектральной модели в задаче технического диагностирования роторных деталей редукторов ГТД [Текст] / В.Н.Журавлёв, А.В. Папчёнков, С.А. Борзов // "Вестник двигателестроения", №2, 2014г., - Запорожье, АО "Мотор Сич", - С. 221228. 7. Патент GB № 2344177 "Detecting vibration of turbine blades", МПК G01H 11/06, G01H 1/00; від 19.10.1998. - аналог. 8. Патент RU № 2246711 "Способ определения параметров течения в компрессоре и устройство для его осуществления", МПК G01M 15/00, F04D 27/02; від 23.05.2003. – найближчий аналог. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 40 45 1. Спосіб діагностики ефективності роботи робочих лопаток газотурбінного двигуна, що включає вимірювання пульсацій статичного тиску за робочим колесом для подальшої обробки сигналу тиску у фазовій області, який відрізняється тим, що ефективність роботи робочих лопаток під експлуатаційним навантаженням визначають шляхом порівняння експлуатаційних значень функції лінійної деформації Lz (t, t ) кінця пера кожної лопатки, що діагностується, у фазовій області обробки сигналу тиску, обчислених на основі функції збільшення повної фази z (t, t ) сигналу частоти проходження лопаток на інтервалі часу, кратному періоду t вибірки, з 50 55 максимальними значеннями згаданої функції лінійної деформації Lmax ( t, t ) кінця пера z робочих лопаток, що раніше визначились у нормативних документах припустимими технічними й експлуатаційними характеристиками лопаток робочого колеса. 2. Спосіб діагностики за п. 1, який відрізняється тим, що для лопаток, що діагностуються, попередньо визначають період tr обертання вала робочого колеса й частоту fr його обертання, паралельно розраховують частоту проходження робочих лопаток fz nz fr , де n z - кількість лопаток робочого колеса, потім з датчика сигналу тиску, який установлюють на корпусі двигуна поблизу робочого колеса за робочими лопатками, знімають сигнал тиску s(t ) , де t - поточний 6 UA 112586 U час, для визначення функції лінійної деформації Lz (t, t ) кінця пера кожної лопатки, що діагностується, за допомогою генератора синусних і косинусних сигналів формують синусні ss (t ) й косинусні sс (t ) сигнали, частоти яких строго дорівнюють розрахованій частоті 5 10 15 проходження робочих лопаток fz , а фази зсунуті між собою на кут 90°, одночасно, використовуючи генератор сигналів частоти вибірки, формують сигнал вибірки sd(t, t ) , частота якого fd більше частоти проходження робочих лопаток fz у двадцять разів, fd 20fz , а період t визначається як величина обернено пропорційна величині частоти вибірки, t 1/ fd , потім, використовуючи аналого-цифрові перетворювачі, аналізований сигнал s(t ) з датчика сигналу тиску, синусні ss (t ) й косинусні sс (t ) сигнали дискретизують із частотою вибірки fd , рівномірно квантують і вибирають аналізований сигнал на інтервалі часу tr , що дорівнює періоду обертання вала робочого колеса, потім, використовуючи обчислювальний засіб, дискретизований аналізований сигнал s( t, t ) множать на дискретизовані сигнали синусних ss (t, t ) і конусних sc (t, t ) сигналів, вибрані на інтервалі часу tr періоду обертання вала робочого колеса, одержуючи сигнали синусних ssp( t, t ) і косинусних scp( t, t ) добутків сигналів тиску, які містять зміни фази сигналу частоти проходження лопаток fz , пропорційні лінійної деформації кінця пера Lz (t, t ) робочих лопаток, що діагностуються, кожний окремо сигнал синусних ssp( t, t ) і косинусних scp( t, t ) добутків сигналів тиску обробляють цифровими фільтрами третього порядку із частотою зрізу, рівною частоті проходження лопаток fz , одержуючи відфільтровані сигнали синусного ssf (t, t ) 20 й косинусного scf (t, t ) добутків сигналів тиску, зсунуті один відносно одного на кут 90°, далі роблять обчислення функції повної фази z (t, t ) сигналу частоти проходження лопаток, яка відображає динаміку зміни статичного кута установки лопаток через інтервали часу t , відповідні періоду вибірки, на інтервалі часу періоду tr обертання вала робочого колеса: ssf ( t, t ) , scf ( t, t ) де ssf (t, t ) - величина відфільтрованого сигналу синусного добутку сигналу тиску; scf ( t, t ) - величина відфільтрованого сигналу косинусного добутку сигналу тиску, після чого обчислюють значення функції лінійної деформації Lz (t, t ) на радіусі rz кінця пера лопатки, що діагностується, на інтервалі часу tr періоду обертання вала робочого колеса по формулі: L z ( t, t ) rz z ( t, t ), . t t ), t tr ) z ( t, t ) arctg 25 30 7 UA 112586 U 8 UA 112586 U Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 9
ДивитисяДодаткова інформація
МПК / Мітки
МПК: F01D 5/00, G01M 13/00, F04D 27/00
Мітки: робочих, двигуна, роботи, спосіб, ефективності, діагностики, газотурбінного, лопаток
Код посилання
<a href="https://ua.patents.su/11-112586-sposib-diagnostiki-efektivnosti-roboti-robochikh-lopatok-gazoturbinnogo-dviguna.html" target="_blank" rel="follow" title="База патентів України">Спосіб діагностики ефективності роботи робочих лопаток газотурбінного двигуна</a>
Спосіб випробування на втомленість робочих лопаток газотурбінного двигуна, відлитих методом направленої кристалізації
Номер патенту: 51825
Опубліковано: 16.12.2002
Автори: Яценко Віктор Кузьмич, Орлов Михайло Романович, Лук'янов Валентин Семенович, Рубель Олег Володимирович
МПК: G01N 3/32
Мітки: кристалізації, спосіб, методом, направленої, двигуна, випробування, лопаток, відлитих, газотурбінного, втомленість, робочих
Формула / Реферат:
Спосіб випробування на втомленість робочих лопаток газотурбінного двигуна, відлитих методом направленої кристалізації, який включає кріплення тензорезисторів, тарування, задавання амплітудної напруги циклу і визначення межі витривалості, який відрізняється тим, що тарування і задавання амплітудної напруги циклу здійснюється статичним навантаженням деталі.
Стенд для діагностики коливань тонкостінної деталі типу лопаток моноколеса газотурбінного двигуна (гтд) при кінцевому фрезеруванні
Номер патенту: 94382
Опубліковано: 10.11.2014
Автори: Анпілогов Дмитро Ігорович, Логомінов Віктор Олексійович, Гермашев Антон Ігорович
МПК: G01H 11/00, G01M 7/02
Мітки: лопаток, деталі, коливань, типу, діагностики, фрезеруванні, газотурбінного, гтд, стенд, кінцевому, моноколеса, двигуна, тонкостінної
Формула / Реферат:
Стенд для діагностики коливань тонкостінної деталі типу лопаток газотурбінного двигуна (ГТД) моноколеса при кінцевому фрезеруванні, який має масивну основу та датчик виміру рівня вібрації, з'єднаний з реєструючою апаратурою, стенд оздоблено трьома паралельно розташованими між собою пластинами, які нижніми частинами міцно з'єднані між собою та з основою, а верхні частини пластин утворюють між собою простір, який може заповнюватись...
Колесо газотурбінного двигуна, оснащене системою лопаток
Номер патенту: 81901
Опубліковано: 25.02.2008
Автори: Мас Жером, Понтуазо Брюс, Фоланьє Крістоф, Лежар Клод, Регезза Патрік
МПК: F01D 5/00, F02C 7/00, F02C 1/00
Мітки: колесо, системою, газотурбінного, двигуна, лопаток, оснащене
Формула / Реферат:
1. Робоче колесо газотурбінного двигуна, оснащене системою лопаток, що містить лопатки (1), розташовані в каналі конічної форми й утримувані в периферійній кільцевій канавці (7) робочого колеса (12) за допомогою вузлів кріплення молоткоподібної форми, причому кожна зі згаданих лопаток додатково має платформу (30), зовнішня в радіальному напрямку поверхня (30а) якої обмежує канал потоку газів і внутрішня в радіальному напрямку поверхня (30b)...
Спосіб визначення частот і форм резонансних коливань лопаток газотурбінного двигуна методом спекл-інтерферометрії
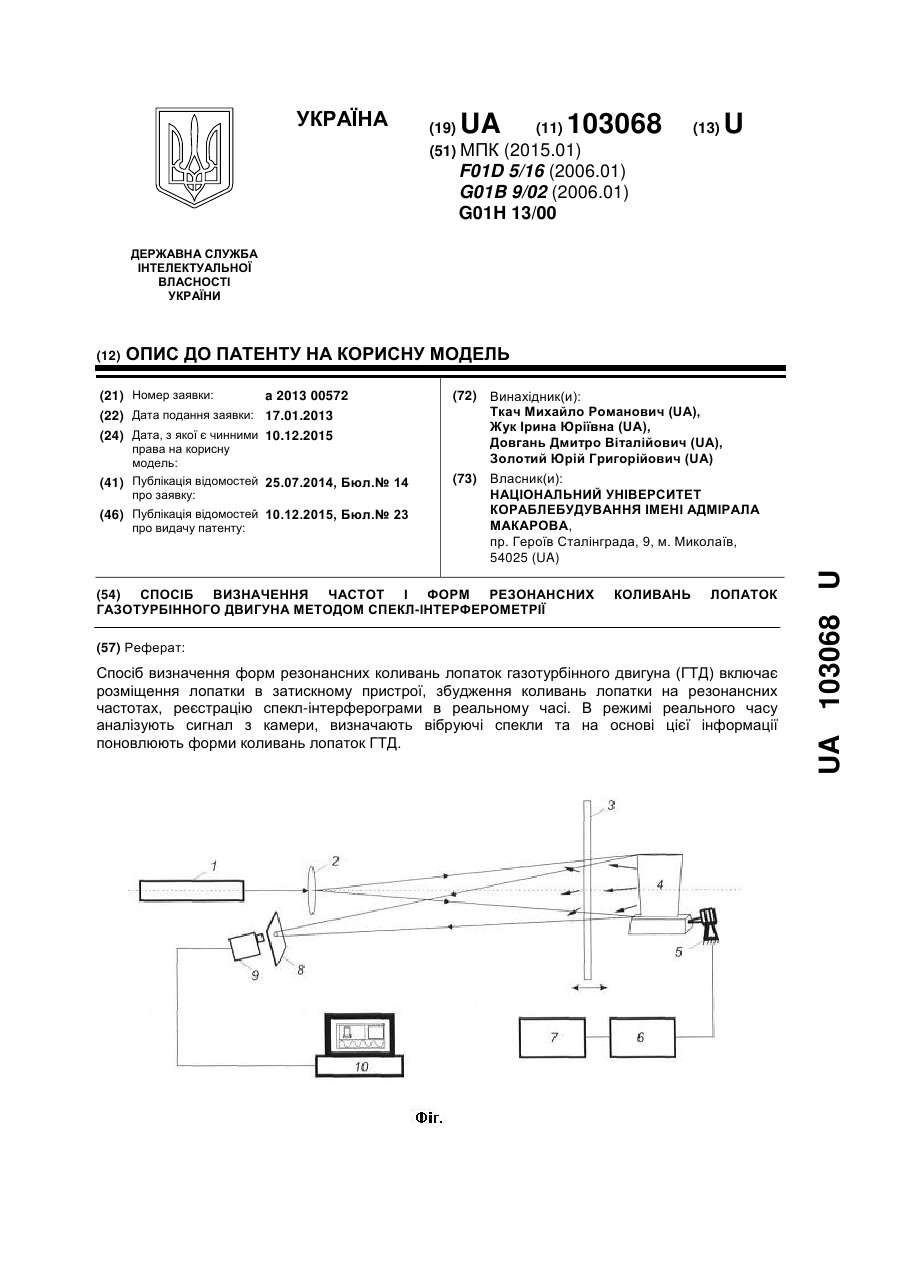
Номер патенту: 103068
Опубліковано: 10.12.2015
Автори: Довгань Дмитро Віталійович, Ткач Михайло Романович, Золотий Юрій Григорійович, Жук Ірина Юріївна
МПК: F01D 5/16, G01H 13/00, G01B 9/02
Мітки: форм, методом, спекл-інтерферометрії, резонансних, частот, двигуна, лопаток, спосіб, коливань, визначення, газотурбінного
Формула / Реферат:
Спосіб визначення частот і форм резонансних коливань лопаток газотурбінного двигуна (ГТД), що включає розміщення лопатки в затискному пристрої, збудження коливань лопатки на резонансних частотах, реєстрацію спекл-інтерферограми в реальному часі, який відрізняється тим, що в режимі реального часу аналізують сигнал з камери, визначають вібруючі спекли та на основі цієї інформації поновлюють форми коливань лопаток ГТД.
Спосіб контролю стану робочих лопаток газоперекачувального агрегату
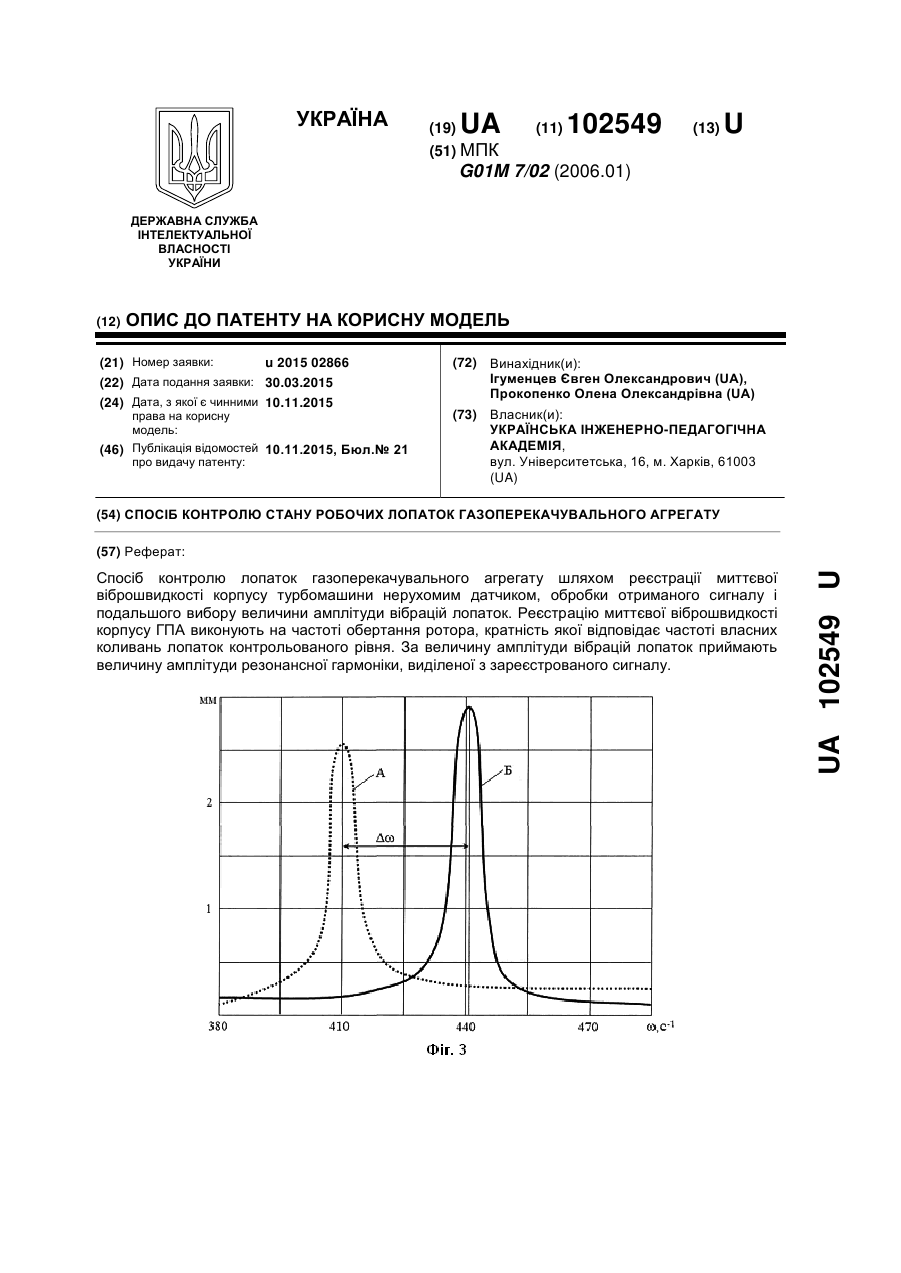
Номер патенту: 102549
Опубліковано: 10.11.2015
Автори: Ігуменцев Євген Олександрович, Прокопенко Олена Олександрівна
МПК: G01M 7/02
Мітки: газоперекачувального, контролю, робочих, агрегату, стану, спосіб, лопаток
Формула / Реферат:
Спосіб контролю лопаток газоперекачувального агрегату шляхом реєстрації миттєвої віброшвидкості корпусу турбомашини нерухомим датчиком, обробки отриманого сигналу і подальшого вибору величини амплітуди вібрацій лопаток, який відрізняється тим, що реєстрацію миттєвої віброшвидкості корпусу ГПА виконують на частоті обертання ротора, кратність якої відповідає частоті власних коливань лопаток контрольованого рівня, а за величину амплітуди...
Попередній патент: Протизапальний гель “зверобой”
Наступний патент: Спосіб моделювання пошкодження смакових рецепторів
Випадковий патент: Інструмент для радіального кування