Спосіб контролю стану робочих лопаток газоперекачувального агрегату
Номер патенту: 102549
Опубліковано: 10.11.2015
Автори: Ігуменцев Євген Олександрович, Прокопенко Олена Олександрівна
Формула / Реферат
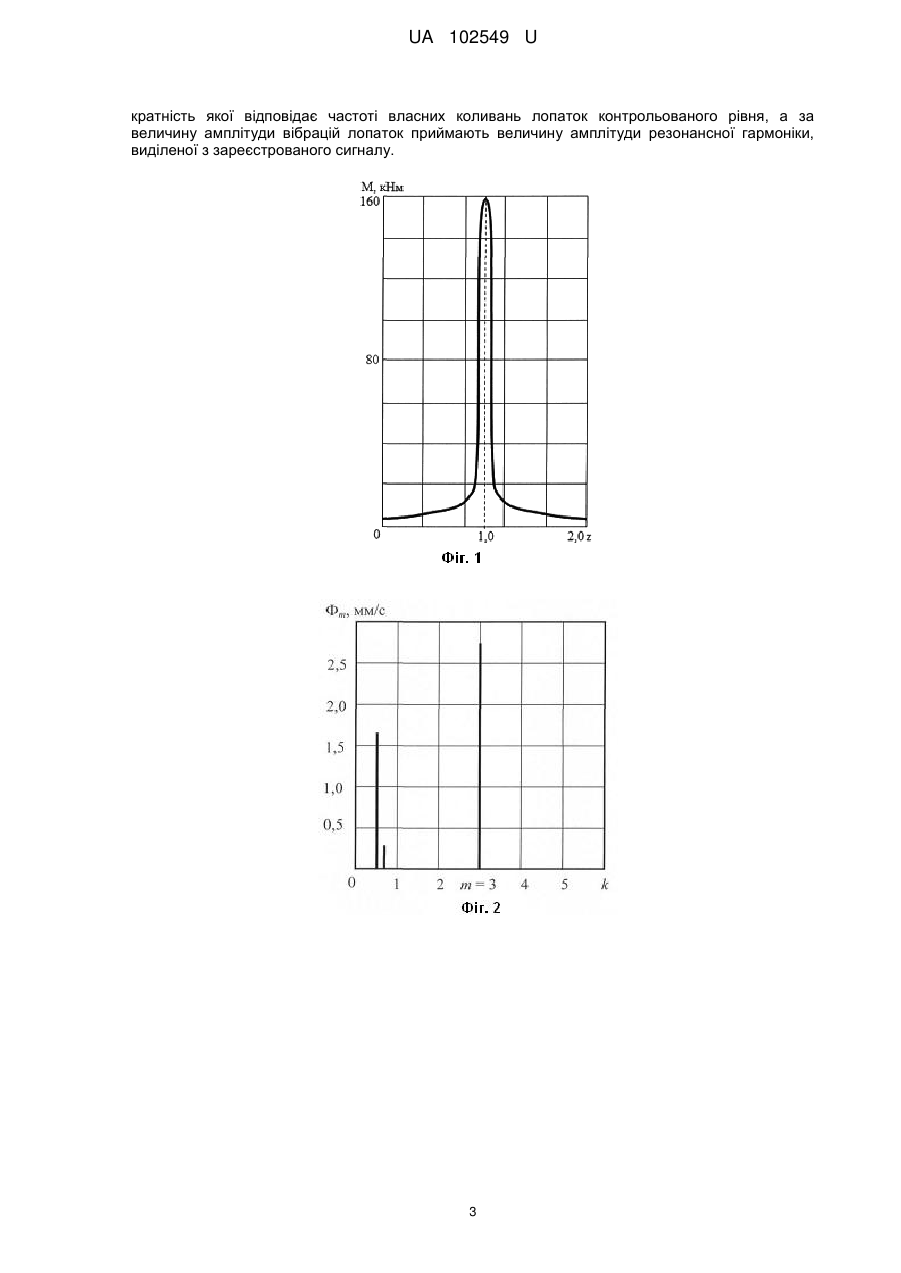
Спосіб контролю лопаток газоперекачувального агрегату шляхом реєстрації миттєвої віброшвидкості корпусу турбомашини нерухомим датчиком, обробки отриманого сигналу і подальшого вибору величини амплітуди вібрацій лопаток, який відрізняється тим, що реєстрацію миттєвої віброшвидкості корпусу ГПА виконують на частоті обертання ротора, кратність якої відповідає частоті власних коливань лопаток контрольованого рівня, а за величину амплітуди вібрацій лопаток приймають величину амплітуди резонансної гармоніки, виділеної з зареєстрованого сигналу.
Текст
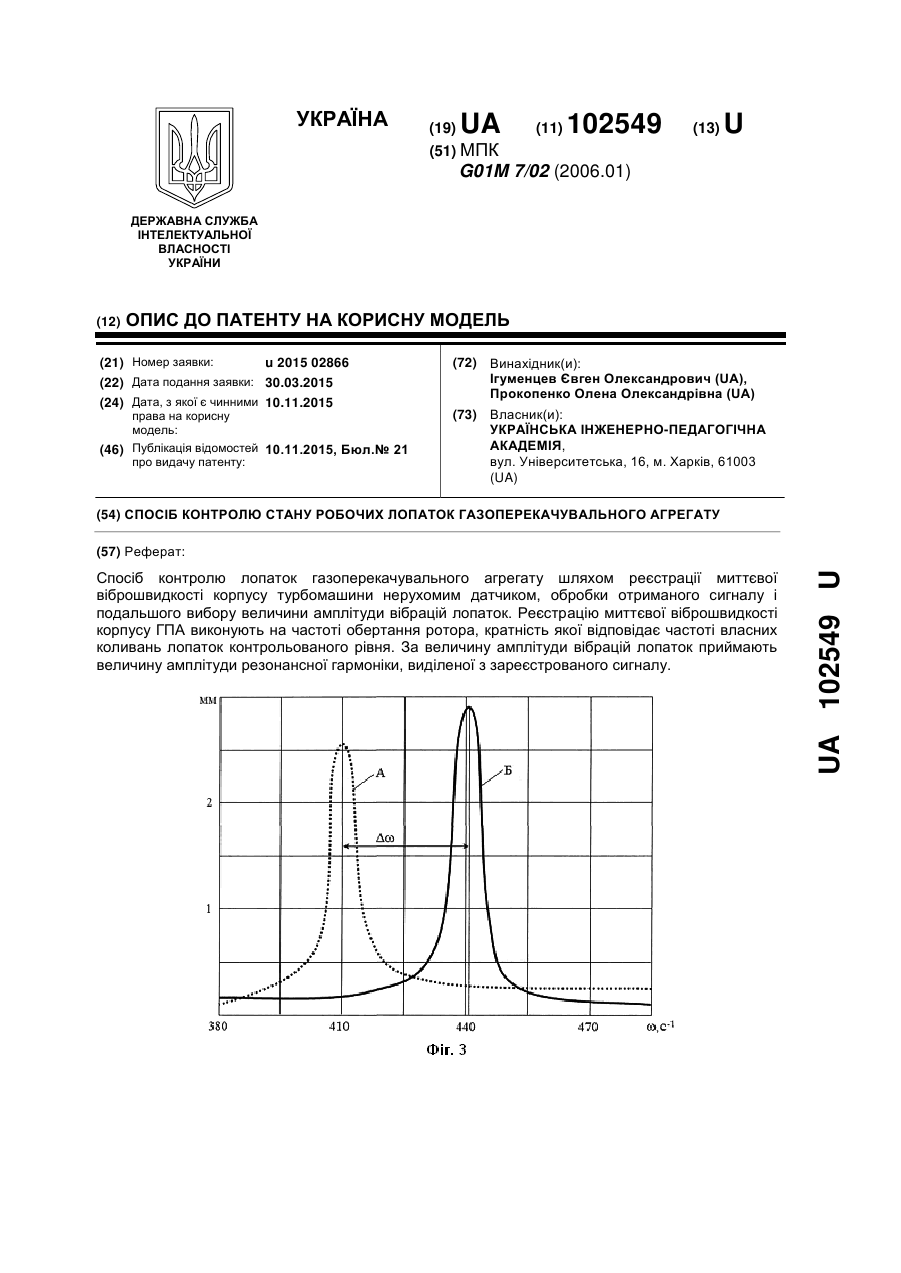
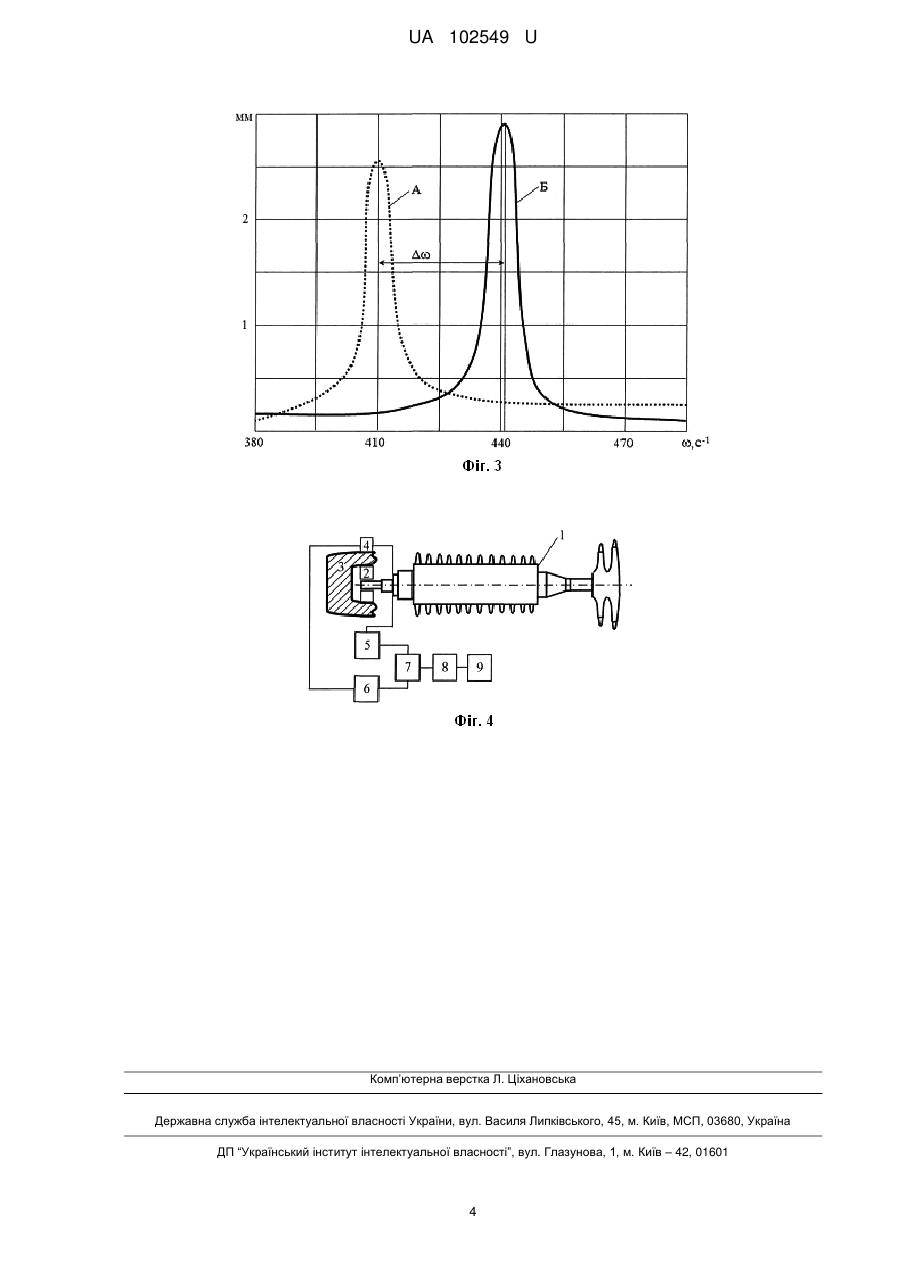
Реферат: UA 102549 U UA 102549 U 5 10 15 20 25 30 35 Корисна модель належить до техніки вимірювання амплітуди вібрацій рухомих лопаток в турбомашині, яка працює, і може бути використана у всіх галузях народного господарства, для контролю резонансних вібрацій робочих лопаток турбін і компресорів в процесі експлуатації [1]. Відомий спосіб контролю шляхом вимірювання вібрацій лопаток при їх нормальній роботі. Спосіб заснований на використані магнітних датчиків, встановлених в певних точках кола ротора. При проходженні лопаток датчиками виробляються електричні сигнали, які порівнюють по фазі. В результаті видається напруга, яка показує наявність випередження або відставання одного сигналу відносно до іншого і величину цього випередження або відставання. Цей відомий спосіб характеризується трудомісткістю при препаруванні корпусу турбомашини і порушенням геометрії її проточної частини, що змінює розрахунковий режим роботи. Відомий також спосіб контролю стану робочих лопаток рівня турбомашини шляхом реєстрації миттєвої кутової швидкості обертання ротора нерухомим датчиком, обробки отриманого сигналу і подальшого вибору величини амплітуди вібрацій лопаток [2]. Проте і він не дозволяє контролювати коливання лопаток всіх рівнів турбіни і компресора одночасно. Використання цього способу пов'язано з поступовим зміненням швидкості обертання валу, що не завжди є можливим в умовах експлуатації турбомашин. Тим часом, для підвищення надійності і запобігання руйнуванню турбомашин вимір резонансних вібрацій в умовах експлуатації є дуже важливим, оскільки у багатьох випадках саме ці коливання представляють найбільшу небезпеку. Задача корисної моделі полягає в розширенні діапазону вживання способу в умовах експлуатації. Задача вирішується тим, що реєструють миттєву кутову швидкість на частоті обертання ротора, кратність якої відповідає частоті власних коливань лопаток контрольованого рівня, а за величину амплітуди вібрацій лопаток приймають величину амплітуди резонансної гармоніки, виділеної з зареєстрованого сигналу. На фіг. 1 представлений графік зміни амплітуди крутильного моменту при резонансі лопаток першого рівня ротора осьового компресора газоперекачувального агрегату (ГПА) ГТК-10-2 з третьою роторною гармонікою, де по осі абсцис відкладені значення відношення частоти збурюючої сили до власної частоти, а по осі ординат - амплітуда крутильного моменту; на фіг. 2 - спектр віброшвидкості корпуса газоперекачувального агрегату (резонанс з третьою роторною гармонікою), де по осі абсцис відкладені номери роторних гармонік, а по осі ординат амплітуди цих гармонік в спектрі віброшвидкості корпуса ГПА; на фіг. 4 - блок-схема пристрою для реалізації описуваного способу. Розглядаючи контрольований об'єкт, наприклад лопатку турбомашини, як коливальну систему з демпфуванням, пропорційним швидкості, отримаємо для кожного рівня турбіни і компресора математичний опис крутильного моменту на роторі турбомашини. Mt A k sinkt k k 1 1 2 2 zk 40 45 50 , zk 2 (1) де A k - коефіцієнт, який залежить від матеріалу, геометричних розмірів лопатки і аеродинамічного зусилля, яке діє на неї; - відношення частоти збурюючої сили до власної частоти лопатки; zk 0 - кругова частота обертання ротора; 0 - власна кругова частота лопатки; - логарифмічний декремент згасання; k - зрушення фази збурюючою силою і викликаним нею коливанням; z - число лопаток ступеня; t - час. Крутильний момент викликає крутильні коливання ротора турбомашини і створює спектр складного сигналу кутової швидкості обертання. Синусоїди цього спектра проходять по валопроводу (каналу) незалежно один від одного і, отже, в спектрі кутової швидкості є присутніми всі гармонійні складові, які викликані роторними гармоніками крутильного моменту. Інтенсивні крутильні коливання валопроводу, величина зміни кутової швидкості яких може бути зареєстрована, викликаються крутильним моментом при резонансних коливаннях лопаток. При 1 UA 102549 U цьому максимальне значення амплітуди моменту визначається лише резонансною роторною гармонікою і виразом: M Am 1 2 2 zm 5 10 15 20 25 30 35 40 45 zm , 2 (2) де m - порядок роторної гармоніки (ціле число), який є відповідним резонансу лопаток при частоті z m 1 0 Всі останні роторні гармоніки крутильного моменту, а отже, і кутової швидкості належать до неминучих перешкод виміру. Графік функції M f z показаний на фіг. 1 при значенні логарифмічного декременту 0,3 . При вимірі віброшвидкості на корпусі ГПА датчиком для одержання посиленого сигналу встановлюють частоту обертання ротора ГПА, ціла кратність якої є близькою до власної частоти коливань лопатки контрольованого рівня. Зареєстрований сигнал надходить в аналізатор гармонік, де виконується спектральний аналіз віброшвидкості, що полягає у виділенні простих гармонійних складових. Спектр віброшвидкості показаний на фіг. 3. Визначення амплітуди резонансних коливань лопатки по виділеній роторній гармоніці віброшвидкості засновано на тому, що в законі руху амплітуда коливань лопатки на контрольованому рівні пов'язана з гармонікою кратності m співвідношенням: У F Фm , де У - амплітуда коливань корпусу турбомашини; Фm - роторна гармоніка віброшвидкості корпусу ГПА; F - передавальна функція, визначення якої для кожного типу турбомашини виконується експериментально або по розрахункам. Пристрій містить ротор 1 (див. фіг. 4), який спирається на підшипники 2, що закріплені на корпусі 3, де встановлений датчик 4, пов'язаний з генератором 5 і підсилювачем 6, сполученими з демодулятором 7, підключеним до аналізатора гармонік 8, пов'язаному з регістратором рівня 9 (персональний комп'ютер (ПК). При обертанні ротора 1 з кутовою швидкістю, яка змінюється за законом резонансних коливань лопаток, вібрація через підшипник 2 передається на корпус 3, що знімається з датчика 4, має форму модульованого по амплітуді сигналу з несучою частотою, яка дорівнює частоті напруги живлення датчика, і огинаючої, яка відтворює закон зміни віброшвидкості. Генератор 5 служить для живлення первинної обмотки датчика 4 синусоїдальним струмом заданої частоти, підсилювач 6 - для посилення, а демодулятор 7 - для виділення огинаючої. Сигнал з демодулятора надходить в аналізатор гармонік 8, де виконується спектральний гармонічний аналіз огинаючої. Виділені гармоніки фіксуються у регістраторі 9, як регістратор використовується ПК. Використання способу в умовах експлуатації дозволить встановлювати міжремонтні терміни ГПА по їх фактичному стану, що в два-три рази зменшить обсяг ремонтних робіт за рахунок виключення переборки таких агрегатів, які знаходяться в хорошому технічному стані, а також дозволить попередити можливі поломки робочих лопаток, а отже, і всього ротора ГПА. Джерела інформації: І.Бесклетньй М.Е., Изуменцев Е.А., Христензен В.Л. Способ контроля состояния рабочих лопаток ступени турбомашины. А.С. 666454. (СССР) - 2452560, заявлено 14.02.77, Б.И., № 21, 1979. 2. Бесклетный М.Е., Изуменцев Е.А., Христензен В.Л. Способ контроля состояния рабочих лопаток ступени турбомашины. А.С. 700795. (СССР) - 2615635, заявлено 10.05.78, Б.И., № 44, 1979. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 50 Спосіб контролю лопаток газоперекачувального агрегату шляхом реєстрації миттєвої віброшвидкості корпусу турбомашини нерухомим датчиком, обробки отриманого сигналу і подальшого вибору величини амплітуди вібрацій лопаток, який відрізняється тим, що реєстрацію миттєвої віброшвидкості корпусу ГПА виконують на частоті обертання ротора, 2 UA 102549 U кратність якої відповідає частоті власних коливань лопаток контрольованого рівня, а за величину амплітуди вібрацій лопаток приймають величину амплітуди резонансної гармоніки, виділеної з зареєстрованого сигналу. 3 UA 102549 U Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for controlling blades of gas-compressor unit
Автори англійськоюIhumentsev Yevhen Oleksandrovych, Prokopenko Olena Oleksandrivna
Назва патенту російськоюСпособ контроля состояния рабочих лопаток газоперекачивающего агрегата
Автори російськоюИгуменцев Евгений Александрович, Прокопенко Елена Александровна
МПК / Мітки
МПК: G01M 7/02
Мітки: спосіб, контролю, лопаток, робочих, агрегату, газоперекачувального, стану
Код посилання
<a href="https://ua.patents.su/6-102549-sposib-kontrolyu-stanu-robochikh-lopatok-gazoperekachuvalnogo-agregatu.html" target="_blank" rel="follow" title="База патентів України">Спосіб контролю стану робочих лопаток газоперекачувального агрегату</a>
Вузол кріплення робочих лопаток ротора осьової турбомашини та спосіб його складання
Номер патенту: 66385
Опубліковано: 17.05.2004
Автори: Лисенко Валентин Микитович, Зубрицька Інна Аркадіївна, Спіцин Володимир Євгенійович
МПК: F01D 5/00
Мітки: ротора, робочих, кріплення, спосіб, вузол, осьової, складання, лопаток, турбомашині
Формула / Реферат:
1. Вузол кріплення робочих лопаток ротора осьової турбомашини, який містить поперечну кільцеву канавку з завантажувальним отвором, профіль якої повторює профіль хвостовиків робочих лопаток, проміжні стопорні елементи такого ж профілю з різьбовими штифтами, що установлені між парою хвостовиків робочих лопаток з можливістю постановки різьбового штифта зі сторони проточної частини, виїмки на полицях лопаток, що контактують із стопорними...
Спосіб контролю роботи газоперекачувального агрегату
Номер патенту: 29136
Опубліковано: 16.10.2000
Автори: Ізбаш Віктор Іванович, Челомбітько Георгій Олександрович, Максімов Вячеслав Павлович, Розгонюк Василь Васильович, Коток Валерій Борисович, Ільченко Борис Самуілович, Бантюков Євген Миколайович
МПК: F04D 27/00
Мітки: агрегату, спосіб, роботи, контролю, газоперекачувального
Формула / Реферат:
Спосіб контролю роботи газоперекачуючого агрегату, включаючий вимірювання значень технологічних параметрів, запис їх в перший масив пам'яті, порівняння значень технологіних параметрів з встановленними для кожного із них межами і формування сигналу при порушенні значенням якого-небудь технологічного параметра встановленнях для нього меж, заздалегідь формування логічних умов виникнення аварійної ситуації, який відрізняється тим що заздалегідь...
Пристрій для кріплення робочих лопаток турбомашини
Номер патенту: 56174
Опубліковано: 10.01.2011
Автори: Коваленко Олександр Павлович, Шанькін Сергій Іванович, Миргородський Сергій Михайлович
Мітки: робочих, пристрій, турбомашині, кріплення, лопаток
Формула / Реферат:
Пристрій для кріплення робочих лопаток турбомашини за допомогою хвостовиків, поміщених у прорізах обода диска, що мають вирізи, які утворюють крізний паз для установки розрізного кільця, що фіксується за допомогою вкладиша, який відрізняється тим, що на диску виконаний фланець для закріплення вкладиша, при цьому вкладиш має U-подібну форму.
Спосіб контролю ерозійного зносу робочих лопаток парової турбіни в процесі експлуатації та пристрій для його здійснення
Номер патенту: 88363
Опубліковано: 12.10.2009
Автори: Шубенко Олександр Леонідович, Євич Микола Леонідович, Суслов Микола Миколайович, Буданов Валентин Євгенович
МПК: G01D 21/00, G01N 22/00, G01B 11/24
Мітки: здійснення, робочих, експлуатації, лопаток, контролю, ерозійного, парової, пристрій, спосіб, процесі, турбіни, зносу
Формула / Реферат:
1. Спосіб контролю ерозійного зносу робочих лопаток парової турбіни в процесі експлуатації шляхом зондування поверхні лопаток електромагнітною хвилею й обробки відбитого сигналу, який відрізняється тим, що зондування здійснюють у безперервному режимі квазіплоскою електромагнітною хвилею 4-міліметрового діапазону, сформованою хвилевідним трактом з елементами узгодження в межах середньої зони дифракції з відстанню до об'єкта контролю 80-120 мм,...
Пристрій для контролю ерозійного зносу робочих лопаток парової турбіни в процесі експлуатації
Номер патенту: 32108
Опубліковано: 12.05.2008
Автори: Буданов Валентин Євгенович, Шубенко Олександр Леонідович, Суслов Микола Миколайович, Євич Микола Леонідович
МПК: G01D 21/00, G01N 22/00, G01B 11/24
Мітки: робочих, пристрій, процесі, експлуатації, парової, контролю, лопаток, ерозійного, зносу, турбіни
Формула / Реферат:
Пристрій дляконтролю ерозійного зносу робочих лопаток парової турбіни в процесі експлуатації, що містить послідовно встановлені приймально-передавальну антену, перший узгоджувальний елемент, спрямований відгалужувач, з'єднаний через другий узгоджувальний елемент з НВЧ-генератором, зв'язаним з детектором, і блок обробки відбитого сигналу, з'єднаний через детектор зі спрямованим відгалужувачем, який відрізняється тим, що пристрій включає...
Попередній патент: Спосіб використання зрошувальних земель залежно від водозабезпечення в зоні дії основних зрошуваних систем україни
Наступний патент: Засіб індикації закупорювального пристрою для пляшки з рідиною
Випадковий патент: Система раннього виявлення надзвичайних ситуацій (срвнс)