Пристрій керування неактивною потужністю асинхронного генератора з фазним ротором
Номер патенту: 119595
Опубліковано: 25.09.2017
Автори: Бялобржеський Олексій Володимирович, Слободенюк Юлія Олександрівна, Чередник Наталія Геннадіївна, Сєров Роман Володимирович
Формула / Реферат
Пристрій керування неактивною потужністю асинхронного генератора з фазним ротором, який містить приводний двигун, механічно з'єднаний з валом асинхронного генератора з фазним ротором, фази ротора асинхронного генератора з фазним ротором через буферну індуктивність з'єднані з першим перетворювачем, який колом постійного струму з'єднаний з другим перетворювачем, який відрізняється тим, що введено датчик швидкості, механічно з'єднаний з валом асинхронного генератора з фазним ротором, блок датчиків струму статора з'єднаний з фазами статора асинхронного генератора з фазним ротором та блоком датчиків напруги статора, який послідовно з першим автоматичним вимикачем з'єднаний з джерелом живлення, детектор, перший вхід якого з'єднаний з виходом блока датчиків напруги статора, блок розрахунку потоку повітряного зазору, перший вхід якого з'єднаний з виходом блока датчиків напруги статора, другий вхід детектора та другий вхід блока розрахунку потоку повітряного зазору з'єднані з виходом блока датчиків струму статора, третій вхід детектора та третій вхід блока розрахунку потоку повітряного зазору з'єднані з виходом датчика швидкості, перший суматор, першим входом з'єднаний з першим виходом детектора, другий вхід першого суматора з'єднаний з виходом блока заданої реактивної потужності, другий вихід детектора з'єднаний з першим входом другого суматора, другий вхід якого з'єднаний з виходом блока заданої активної потужності, вихід першого суматора з'єднано з першим регулятором струму, вихід другого суматора з'єднано з другим регулятором струму, датчик струму ротора вихід якого з'єднаний з другим входом першого координатного перетворювача, перший вхід якого з'єднаний з другим виходом блока розрахунку потоку повітряного зазору, перший вихід блока розрахунку потоку повітряного зазору з'єднаний з другим входом блока керування першим перетворювачем, перший вихід першого координатного перетворювача з'єднаний з другим входом третього суматора перший вхід якого з'єднаний з виходом другого регулятора струму, другий вихід першого координатного перетворювача з'єднаний з другим входом четвертого суматора, перший вхід якого з'єднаний з виходом першого регулятора струму, вихід третього суматора, з'єднаний з входом першого регулятора напруги, вихід першого регулятора напруги з'єднаний з першим входом блока керування першим перетворювачем, вихід четвертого суматора, з'єднаний з входом другого регулятора напруги, вихід другого регулятора напруги з'єднаний з третім входом блока керування першим перетворювачем, блок керування першим перетворювачем з'єднаний з керуючим входом першого перетворювача, конденсаторний накопичувач, паралельно з'єднаний з другим перетворювачем та датчиком напруги конденсаторного накопичувача, другий перетворювач фазними виводами через блок датчиків струму мережі та мережевий фільтр з'єднаний з блоком датчиків напруги мережі, другим автоматичним вимикачем який послідовно з'єднаний з джерелом живлення, до джерела живлення через блок датчиків струму додаткового навантаження підключене додаткове навантаження, вихід датчика напруги конденсаторного накопичувача з'єднаний з другим входом блока керування напругою конденсатора, перший вхід блока керування напругою конденсатора з'єднаний з виходом блока задання напруги, вихід блока датчиків струму додаткового навантаження з'єднаний з входом другого координатного перетворювача, вихід якого з'єднаний з другим входом блока розрахунку потужності, перший вхід якого з'єднаний з виходом третього координатного перетворювача, вхід якого з'єднаний з блоком датчиків напруги мережі, вихід блока розрахунку потужності з'єднаний з першим входом четвертого координатного перетворювача, другий вхід якого з'єднаний з виходом блока керування напругою конденсатора, вихід блока датчиків струму мережі з'єднаний з п'ятим координатним перетворювачем, вихід блока датчиків напруги мережі з'єднаний з входом шостого координатного перетворювача, блок керування вектором струму мережі, перший вхід якого з'єднаний з виходом п'ятого координатного перетворювача, другий вхід блока керування вектором струму мережі з'єднаний з виходом шостого координатного перетворювача, третій вхід блока керування вектором струму мережі з'єднаний з виходом четвертого координатного перетворювача, вихід блока керування вектором струму мережі з'єднаний з входом сьомого координатного перетворювача, вихід якого з'єднаний з першим входом блока широтно-імпульсної модуляції, другий вхід якого з'єднаний з виходом блока задання напруги, вихід блока широтно-імпульсної модуляції з'єднаний з керуючим входом другого перетворювача.
Текст
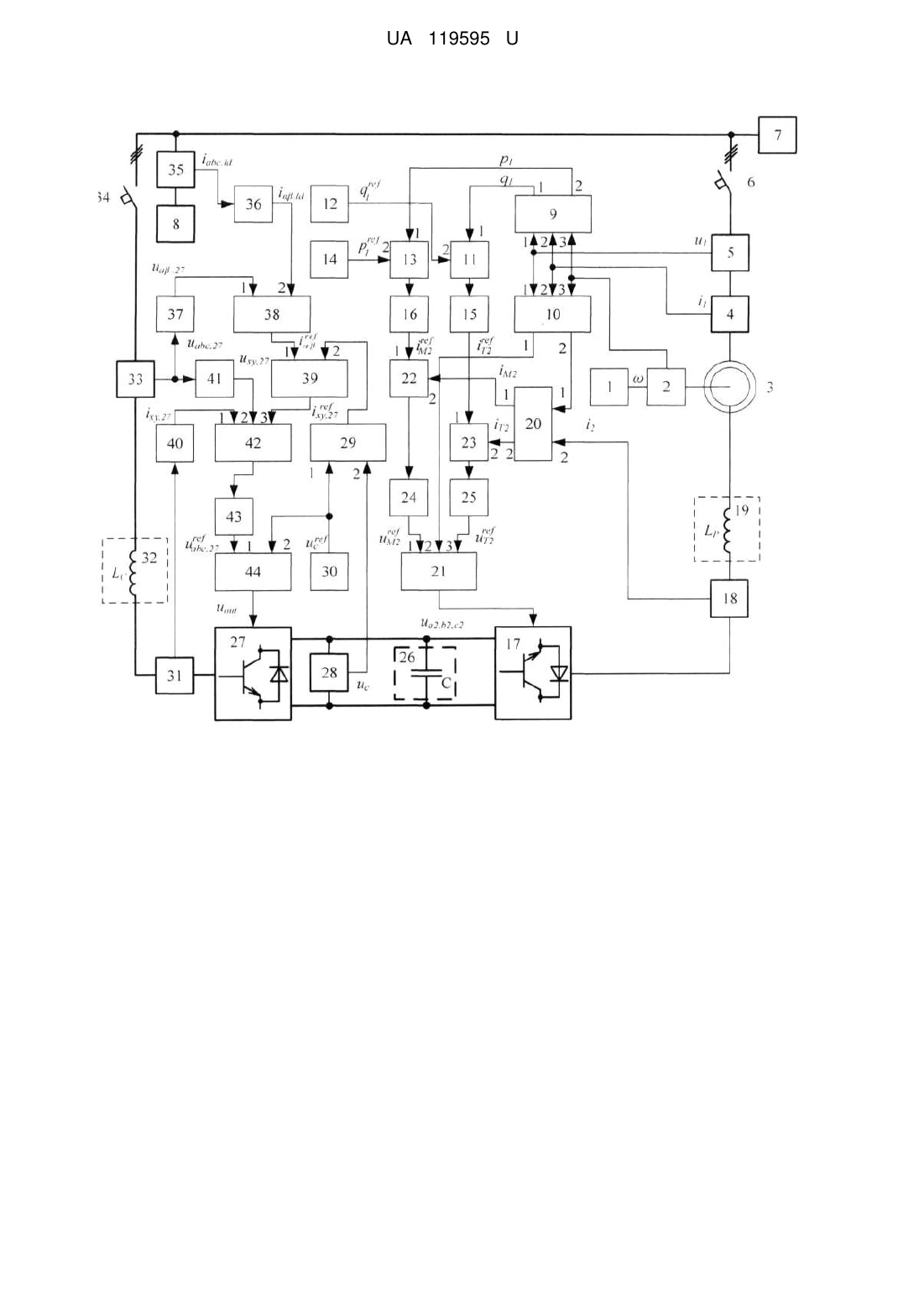
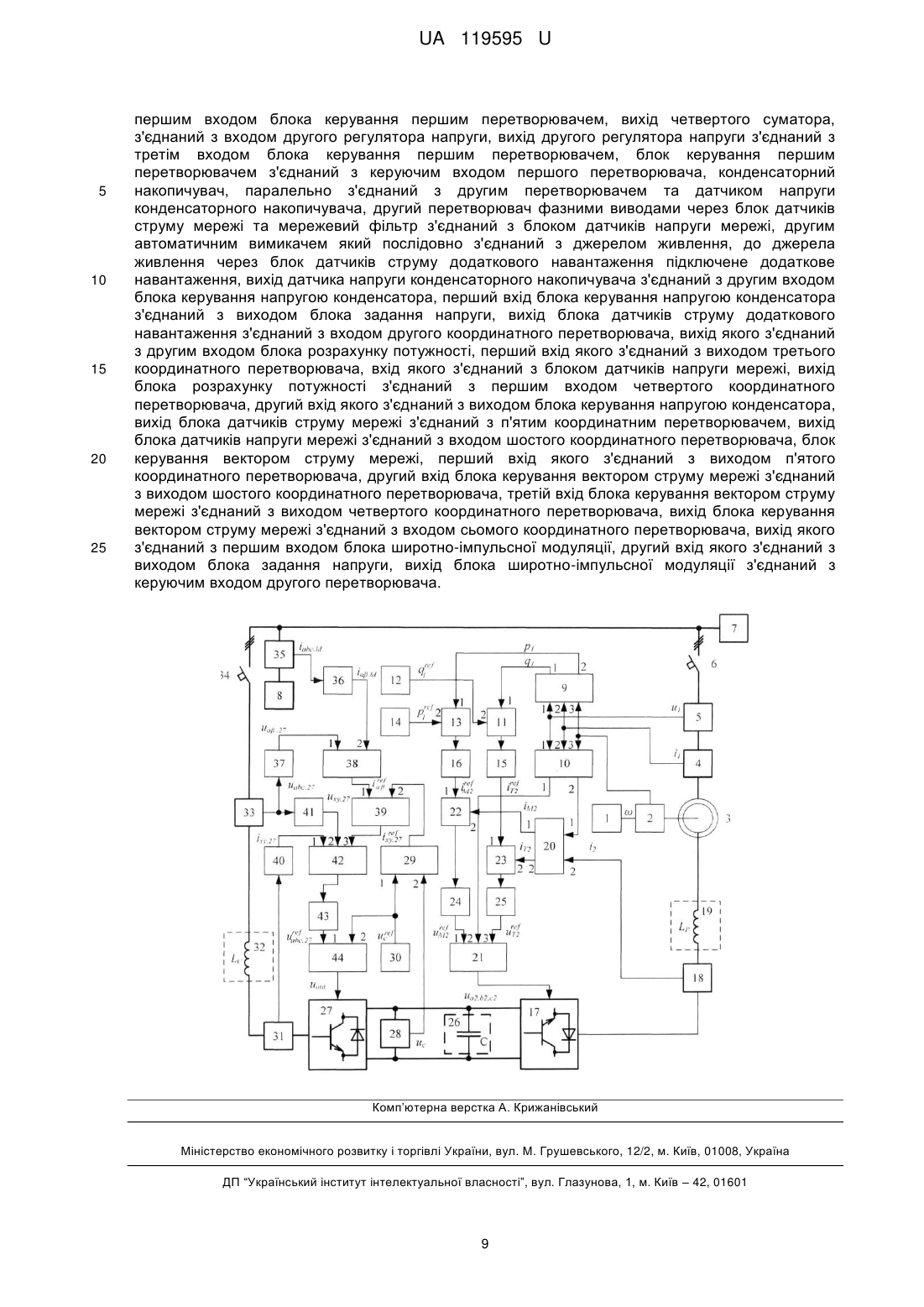
Реферат: Пристрій керування неактивною потужністю асинхронного генератора з фазним ротором містить приводний двигун механічно з'єднаний з валом асинхронного генератора з фазним ротором, фази ротора асинхронного генератора з фазним ротором через буферну індуктивність з'єднані з першим перетворювачем, який колом постійного струму з'єднаний з другим перетворювачем. При цьому додатково введено датчик швидкості механічно з'єднаний з валом асинхронного генератора з фазним ротором, блок датчиків струму статора з'єднаний з фазами статора асинхронного генератора з фазним ротором та блоком датчиків напруги статора, який послідовно з першим автоматичним вимикачем з'єднаний з джерелом живлення, детектор, перший вхід якого з'єднаний з виходом блока датчиків напруги статора, й блок розрахунку потоку повітряного зазору. UA 119595 U (12) UA 119595 U UA 119595 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до електротехніки, а саме до систем керування асинхронними машинами з фазним ротором, та може бути використана для компенсації неактивних складових потужності у вузлах мережі до яких підключається асинхронна машина в генераторному режимі. Важлива задача керування збудженням асинхронної машини при зміні параметрів режиму вирішується використанням інверторних пристроїв, які мають широкий спектр застосування. Наявність у силовому каналі пристроїв для перетворення енергії постійного струму в енергію змінного струму дозволяє використовувати їх одночасно для вирішення двох задач керування активною та неактивною потужностями. Для стабільного управління активною і неактивною потужністю, необхідно незалежно управляти ними. Керування активною потужністю це еквівалентно керуванню моментом на валу машини, а керування реактивною потужністю відбувається шляхом регулювання збудження. Таким чином, для досягнення незалежного управління, струм і напруга обмотки ротора повинні бути розділені на компоненти, що належать до активної і неактивної потужності статора. Відоме технічне рішення [Патент № 23894, KZ, H02K 47/00 Асинхронный генератор с фазным ротором для ветроэнергетической установки / Исембергенов Н.Т., Опубл.15.04.2011 Бюл. 4], в якому асинхронний генератор з фазним ротором для вітроенергетичної установки містить вітроколесо, асинхронний генератор з фазним ротором, що стежить, привід, складається з сельсина-датчика, сельсина-приймача, порівняльного пристрою, регулятора, підсилювача, двигуна, редуктора, а в трифазну ланцюга ротора асинхронного генератора включені n активних опорів через n контактів реле, крім того, встановлена додаткова вітроустановка з флюгером і синхронним генератором на валу, причому статорні обмотки синхронного генератора підключені до n обмоткам реле через додаткові індуктивності і ємності, які розраховані на резонансне явище. Суттєві ознаки відомого технічного рішення, які збігаються із технічним рішенням, що заявляється, полягають у наявності асинхронного генератора з фазним ротором, датчика швидкості. Недоліком цього технічного рішення є: відсутність пристрою для передачі генерованої енергії до мережі загального призначення; відсутність системи управління процесом передачі енергії до мережі; відсутність системи компенсації неактивних складових потужності мережі, що унеможливлює процеси керованої передачі енергії до мережі та компенсації неактивних складових потужності. Відоме технічне рішення [Ордатаев О.Б. Определение закона изменения тока возбуждения автономного асинхронного генератора/ Научные исследования студентов в решении актуальных проблем АПК: Сборник статей студенческой научно-практической конференции с международным участием (12-14 марта 2013 г.). Часть I. - Иркутск: Издательство ИрГ-СХА, 2013.-140-142 с], яке містить асинхронний генератор з фазним ротором механічно з'єднаний з приводним двигуном, система збудження у вигляді транзисторного перетворювача, з'єднаного колом змінного струму з фазами ротора асинхронного генератора та навантаження з'єднане з фазами статора асинхронного генератора, на валу асинхронного генератора встановлено перетворювач кутових переміщень, вихід якого з'єднаний з вказівником частоти обертання. Суттєві ознаки відомого технічного рішення, які збігаються із технічним рішенням, що заявляється, полягають у асинхронному генераторі з фазним ротором механічно з'єднаним з приводним двигуном, системі збудження у вигляді транзисторного перетворювача, з'єднаного колом змінного струму з фазами ротора асинхронного генератора та навантаженні з'єднаному з фазами статора асинхронного генератора. Недоліком цього технічного рішення є: відсутність системи управління процесом передачі енергії до мережі; відсутність системи компенсації неактивних складових потужності мережі, що унеможливлює процеси керованої передачі енергії до мережі та компенсації неактивних складових потужності. Відоме технічне рішення [Патент № 2539347, RU, H02P9/44, Способ управления автономным асинхронным двигателем / Мещеряков В.Н. Мещерякова О.В. Опубл. В 20.01.2015], яке містить автономний асинхронний генератор з фазним ротором, з'єднаний з джерелом механічної енергії обертання, які мають змінну швидкість обертання, у коло фазного ротора автономного асинхронного генератора включений регульований перетворювач, що містить послідовно з'єднані по колу постійного струму автономний інвертор струму, регульований випрямляч, згладжуючий реактор, регульований випрямляч працює в режимі джерела струму, до силового входу інвертора паралельно з обмоткою ротора підключені конденсатори, силовий вхід регульованого випрямляча підключений до вихідного ланцюга автономного асинхронного генератора. Для початкового запуску автономного асинхронного генератора паралельно випрямлячу включена акумуляторна батарея, управління напругою на 1 UA 119595 U 5 10 15 20 25 30 35 40 45 50 55 60 виході автономного інвертора струму здійснюється за допомогою релейно-гістерезисних регуляторів фазних напруг, мають внутрішні вузли порівняння вхідних сигналів, перші входи релейно-гістерезисних регуляторів фазних напруг з'єднані з фазними виходами формувача, який виробляє сигнали задання миттєвих значень напруги на виході інвертора, другі входи релейно-гістерезисних регуляторів фазних напруг з'єднані з фазними виходами інвертора, амплітудний вхід формувача з'єднаний з виходом блока обмеження, вхід якого з'єднаний з виходом пропорційно-інтегрального регулятора напруги, а його вхід з'єднаний з виходом вузла порівняння, позитивний вхід вузла порівняння з'єднаний з виходом блока задання вихідної напруги генератора, негативний вхід вузла порівняння з'єднаний з виходом датчика вихідної напруги генератора, частотний вхід формувача з'єднаний з виходом суматора, перший вхід якого з'єднаний з виходом блока задання вихідної частоти, другий вхід суматора з'єднаний з виходом пропорційного блока, вхід якого з'єднаний з виходом датчика частоти обертання ротора, встановленого на одному валу з генератором і джерелом механічної енергії. Суттєві ознаки відомого технічного рішення, які збігаються із технічним рішенням, що заявляється, полягають у автономному асинхронному генераторі з фазним ротором, з'єднаним з джерелом механічної енергії обертання, які мають змінну швидкість обертання, у коло фазного ротора автономного асинхронного генератора включений регульований перетворювач, що містить послідовно з'єднані по колу постійного струму перший перетворювач, другий перетворювач, реактор. Недоліком відомого технічного рішення є: відсутність блоків та зв'язків формування другого струму другого перетворювача, що не забезпечує компенсацію неактивних складових струму в мережевих колах живлення ротора; відсутність системи управління активною та реактивною потужностями статорного кола асинхронного генератора з фазним ротором, що не дозволяє окремо формувати керуючі впливи за відповідними компонентами повної потужності асинхронного генератора. Відоме технічне рішення прийнято за прототип, у зв'язку з наявністю у ньому більшої кількості спільних ознак із корисною моделлю, що заявляється. В основу корисної моделі поставлена задача розробки пристрою керування асинхронним генератором з фазним ротором з компенсацією неактивних складових потужності мережі, шляхом введення другого перетворювача, датчиків струму мережі, датчиків струму навантаження та блоків формування керуючих сигналів, координатних перетворювачів, забезпечити керування процесом передачу енергії до мережі з компенсацію неактивних складових потужності вузла електричної мережі до якого під'єднаний генератор. Поставлена задача вирішується тим, що у пристрої керування неактивною потужністю асинхронного генератора з фазним ротором, який містить приводний двигун механічно з'єднаний з валом асинхронного генератора з фазним ротором, фази ротора асинхронного генератора з фазним ротором через буферну індуктивність з'єднані з першим перетворювачем, який колом постійного струму з'єднаний з другим перетворювачем, згідно з корисною моделлю, введено датчик швидкості механічно з'єднаний з валом асинхронного генератора з фазним ротором, блок датчиків струму статора з'єднаний з фазами статора асинхронного генератора з фазним ротором та блоком датчиків напруги статора, який послідовно з першим автоматичним вимикачем з'єднаний з джерелом живлення, детектор, перший вхід якого з'єднаний з виходом блока датчиків напруги статора, блок розрахунку потоку повітряного зазору, перший вхід якого з'єднаний з виходом блока датчиків напруги статора, другий вхід детектора та другий вхід блока розрахунку потоку повітряного зазору з'єднані з виходом блока датчиків струму статора, третій вхід детектора та третій вхід блока розрахунку потоку повітряного зазору з'єднані з виходом датчика швидкості, перший суматор, першим входом з'єднаний з першим виходом детектора, другий вхід першого суматора з'єднаний з виходом блока заданої реактивної потужності, другий вихід детектора з'єднаний з першим входом другого суматора, другий вхід якого з'єднаний з виходом блока заданої активної потужності, вихід першого суматора з'єднано з першим регулятором струму, вихід другого суматора з'єднано з другим регулятором струму, датчик струму ротора вихід якого з'єднаний з другим входом першого координатного перетворювача, перший вхід якого з'єднаний з другим виходом блока розрахунку потоку повітряного зазору, перший вихід блока розрахунку потоку повітряного зазору з'єднаний з другим входом блока керування першим перетворювачем, перший вихід першого координатного перетворювача з'єднаний з другим входом третього суматора перший вхід якого з'єднаний з виходом другого регулятора струму, другий вихід першого координатного перетворювача з'єднаний з другим входом четвертого суматора, перший вхід якого з'єднаний з виходом першого регулятора струму, вихід третього суматора, з'єднаний з входом першого регулятора напруги, вихід першого регулятора напруги з'єднаний з першим входом блока керування першим 2 UA 119595 U 5 10 15 20 25 30 35 40 45 50 55 перетворювачем, вихід четвертого суматора, з'єднаний з входом другого регулятора напруги, вихід другого регулятора напруги з'єднаний з третім входом блока керування першим перетворювачем, конденсаторний накопичувач, паралельно з'єднаний з другим перетворювачем та датчиком напруги конденсаторного перетворювача, другий перетворювач фазними виводами через блок датчиків струму мережі та мережевий фільтр з'єднаний з блоком датчиків напруги мережі, другим автоматичним вимикачем який послідовно з'єднаний з джерелом живлення, до джерела живлення через блок датчиків струму додаткового навантаження підключене додаткове навантаження, вихід датчика напруги конденсаторного накопичувача з'єднаний з другим входом блока керування напругою конденсатора, перший вхід блока керування напругою конденсатора з'єднаний з виходом блока задання напруги конденсатора, вихід блока датчиків струму додаткового навантаження з'єднаний з входом другого координатного перетворювача, вихід якого з'єднаний з другим входом блока розрахунку потужності, перший вхід якого з'єднаний з виходом третього координатного перетворювача, вхід якого з'єднаний з блоком датчиків напруги мережі, вихід блоку розрахунку потужності з'єднаний з першим входом четвертого координатного перетворювача, другий вхід якого з'єднаний з виходом блока керування напругою конденсатора, вихід блока датчиків струму мережі з'єднаний з п'ятим координатним перетворювачем, вихід блока датчиків напруги мережі з'єднаний з входом шостого координатного перетворювача, блок керування вектором струму мережі, перший вхід якого з'єднаний з виходом п'ятого координатного перетворювача, другий вхід блока керування вектором струму мережі з'єднаний з виходом шостого координатного перетворювача, третій вхід блока керування вектором струму мережі з'єднаний з виходом четвертого координатного перетворювача, вихід блока керування вектором струму мережі з'єднаний з входом сьомого координатного перетворювача, вихід якого з'єднаний з першим входом блока широтно-імпульсної модуляції, другий вхід якого з'єднаний з виходом блока задання напруги, вихід блока широтно-імпульсної модуляції з'єднаний з керуючим входом другого перетворювача. Корисна модель пояснюється наступними кресленнями: На кресленні показана схема системи керування. Система керування складається з таких елементів: 1 - приводний двигун; 2 - датчик швидкості; 3 асинхронний генератор з фазним ротором; 4 блок датчиків струму статора; 5 - блок датчиків напруги статора; 6 - перший автоматичний вимикач; 7 - джерело живлення; 8 - додаткове навантаження; 9 - детектор; 10 блок розрахунку потоку повітряного зазору; 11 - перший суматор: 12 - блок заданої реактивної потужності; 13 - другий суматор; 14 - блок заданої активної потужності; 15 - перший регулятор струму; 16 - другий регулятор струму; 17 - перший перетворювач; 18 - блок датчиків струму ротора; 19 - буферна індуктивність; 20 - перший координатний перетворювач; 21 - блок керування першим перетворювачем; 22 - третій суматор; 23 - четвертий суматор; 24 - перший регулятор напруги; 25 - другий регулятор напруги; 26 - конденсаторний накопичувач; 27 - другий перетворювач; 28 датчик напруги конденсаторного накопичувача; 29 - блок керування напругою конденсатора; 30 - блок задання напруги конденсатора; 31 - блок датчиків струму мережі; 32 мережевий фільтр; 33 - блок датчиків напруги мережі; 34 - другий автоматичний вимикач; 35 блок датчиків струму додаткового навантаження; 36 - другий координатний перетворювач; 37 третій координатний перетворювач; 38 - блок розрахунку потужності; 39 - четвертий координатний перетворювач; 40 п'ятий координатний перетворювач; 41 - шостий координатний перетворювач; 42 - блок керування вектором струму мережі; 43 - сьомий координатний перетворювач; 44 - блок широтно-імпульсної модуляції; На кресленні приводний двигун 1 з'єднаний через датчик швидкості 2 механічно з валом асинхронного генератора з фазним ротором 3. Три фази статорної обмотки асинхронного генератора з фазним ротором 3 через блок датчиків струму статора 4 та блок датчиків напруги статора 5 через перший автоматичний вимикач 6 з'єднані з мережею 7. Вихід блока датчиків напруги статора 5, на якому діє сигнал u1 , з'єднаний з першим входом детектора 9 та першим входом блока розрахунку потоку повітряного зазору 10, третій вхід якого зв'язаний з виходом датчика швидкості 2, та третім входом детектора 9. Вихід блока датчиків струму статора 4, на якому діє сигнал i1 , з'єднаний з другим входом детектора 9 та другим входом блока розрахунку потоку повітряного зазору 10. В детекторі виконують ланку перетворень, зокрема визначають проекції струму статора i1 на осі М і Т: 3 UA 119595 U iM1 cos( ) sin( ) 1 iT1 sin( ) cos( ) 0 1/ 2 3 /2 ia1 1/ 2 ib1 3 / 2 i ca1 (1) Аналогічно виконується перетворення напруги uM1,uT1T ua1,ub1,uc1T 5 Перший вихід детектора 9, на якому діє сигнал q1 uM1iT1 uT1iM1 , 10 (2) (3) де q1 - реактивна потужність статора; iM1 і iT1 - проекції струму статора на осі М і Т обертової системи координат; uM1 і uT1 - проекції напруги статора на осі М і Т обертової системи координат, з'єднаний з першим входом першого суматора 11, другий вхід якого ref з'єднаний з виходом блока заданої реактивної потужності q1 12, на виході якого формують сигнал ref 2 2Tref ref ref Lm imr ref 2 2T , q1 imr 2ref m 3pp 2 3pp 2 15 (4) де, imr ref - необхідний струм намагнічування, 2 - кутова швидкість ротора, ref - задане потокозчеплення повітряного зазору; T ref - заданий момент на валу m асинхронного генератора з фазним ротором; p p - число пар полюсів; 2 L2 / R2 постійна часу ротора; L 2 - індуктивність ротора; R 2 - опір ротора; Lm - індуктивність намагнічування. Другий вихід детектора 9, на якому діє сигнал: 20 p1 uM1iM1 uT1iT1 , (5) де p1 - активна потужність статора, з'єднаний з першим входом другого суматора 13, другий ref вхід якого з'єднаний з виходом блока заданої активної потужності p1 14. ref p1 Tref 2 Tref (2n2 ) , (6) 25 де, n 2 - оберти вала ротора. Вихід першого суматора 11 з'єднано з першим регулятором струму 15, який являє собою типовий ПІ-регулятор, на виході якого діє сигнал iref . Вихід другого суматора з'єднано з другим M2 30 35 регулятором струму 16, який являє собою типовий ПІ-регулятор, на виході якого діє сигнал iref . T2 Вихід першого перетворювача 17 з'єднаний через блок датчиків струму ротора 18 та буферну індуктивність 19 з фазами ротору асинхронного генератора з фазним ротором 3. Вихід датчика струму ротора 18, на якому діє сигнал i 2 , з'єднаний з другим входом першого координатного перетворювача 20, перший вхід якого з'єднаний з другим виходом блока розрахунку потоку повітряного зазору 10. Перший вихід блока розрахунку потоку повітряного зазору 10, з'єднаний з другим входом блоку керування першим перетворювачем 21. На першому виході першого координатного перетворювача 20 діє сигнал iM2 iM2 uM2 / R2 , (7) де, R 2 - опір обмоток ротора, uM2 - проекція напруги ротора на вісь М: 4 UA 119595 U L di dM2 uM2 R 2 iM2 2 M1 (S )L 2L T 2 (2 ) T 2 , dt dt 5 (8) де L2 - індуктивність розсіювання ротора, S - кутова швидкість ковзання, ) - кутова швидкість потоку в повітряному зазорі, M2 і T2 - проекції потокозчеплення в повітряному зазорі ротора на осі М і Т, iM1 - проекція струму статора на вісь М, L T 2 - індуктивність ротора по осі Т. Перший вихід першого координатного перетворювача 20 з'єднаний з другим входом третього суматора 22, перший вхід якого з'єднаний з виходом другого регулятора струму 16. На другому виході першого координатного перетворювача 20 діє сигнал iT2 : iT2 (uT2 uT1 2 ) / R2 , (9) 10 де uT1 - константа що відповідає рівню напруги мережі, - потік повітряного зазору, 2 кутова швидкість ротора, uT2 - проекція напруги ротора на вісь Т: L di d T 2 uT 2 R 2iT 2 2 T 2 (S )L 2LM2 (S )M2 , dt dt (10) 15 де M2 і T2 - проекції потокозчеплення в повітряному зазорі ротора на осі М і Т, R1 і R 2 - опір статора і ротора. Другий вихід першого координатного перетворювача 20 з'єднаний з другим входом четвертого суматора 23, перший вхід якого з'єднаний з виходом першого регулятора струму 15. Вихід третього суматора 22, з'єднаний з входом першого регулятора напруги 24, який являє 20 собою типовий ПІ-регулятор, на виході якого формується сигнал uref . Вихід першого M2 регулятора напруги 24 з'єднаний з першим входом блока керування першим перетворювачем 21. Вихід четвертого суматора 23, з'єднаний з входом другого регулятора напруги 25, який 25 являє собою типовий ПІ-регулятор, на виході якого формується сигнал uref . Вихід другого T2 регулятора напруги 25 з'єднаний з третім входом блока керування першим перетворювачем 21. Блок керування першим перетворювачем 21 формує сигнал керування ключами тиристорів по фазам А, В, С: ua2 1 u 1/ 2 b2 uc 2 1/ 2 30 35 0 cos( ) sin( ) uM2 , 3 / 2 sin( ) cos( ) u T2 3 / 2 (11) цей сигнал є опорним для першого перетворювача 17. Перший перетворювач 17 колом постійної напруги паралельно з'єднаний з конденсаторним накопичувачем 26. Конденсаторний накопичувач 26 з'єднаний з другим перетворювачем 27 паралельно з датчиком напруги конденсаторного накопичувача 28, вихід якого з'єднаний з другим входом блока керування напругою конденсатора 29. Перший вхід блока керування напругою конденсатора 29 з'єднаний з виходом блока задання напруги конденсатора 30, на якому діє сигнал uref . В блоці керування напругою конденсатора c 29 порівнюють сигнал з датчика напруги конденсаторного накопичувача 28 uc і сигнал заданої 40 напруги конденсатора блока задання напруги конденсатора 30 uref . На виході блока керування c напругою конденсатора 29 формується сигнал заданої складової активного струму другого перетворювача 27 iref k .pu k .i udt , y.27 (12) 5 UA 119595 U де k .p k C ; k .i k C ; C - ємність конденсатора; k - коефіцієнт передачі другого 2 3Tk 12Tk перетворювача за керуючою напругою; Tk - мала некомпенсована стала часу контуру напруги. 5 10 При цьому задана складова реактивного струму другого перетворювача iref покладається x .27 нульовою. Другий перетворювач 27 фазними виводами через блок датчиків струму мережі 31, мережевий фільтр 32, блок датчиків напруги мережі 33 та другий автоматичний вимикач 34 з'єднаний з мережею 7. Паралельно джерелу живлення 7 через блок датчиків струму додаткового навантаження 35 підключено додаткове навантаження 8. Вихід блока датчиків струму додаткового навантаження 35, на якому діє сигнал iabc.ld , з'єднаний з входом другого координатного перетворювача 36, на виході якого формують сигнал i.ld 2 i.ld 3 i .ld 0 15 1 3 1 3 i a.ld ib.ld . i 3 c.ld 1 3 1 (13) Вихід блока датчиків напруги мережі 33, на якому діє сигнал uabc.ld , з'єднаний з входом третього координатного перетворювача 37, на виході якого формують сигнал u.ld . u.ld,u.ld T ua.ld,ub.ld,uc.ld T . (14) Блок розрахунку потужності 38 другим входом з'єднаний з другим координатним перетворювачем 36, а першим входом з третім координатним перетворювачем 37. На виході 20 блока розрахунку потужності формують струм iref iref 1 2 2 ref i u.ld u.ld u.ld u.ld ~ld p u . .ld u.ld qld (15) Компоненти активної pld та неактивної qld потужностей pld u.ldi.ld u.ldi.ld ; (16) qld u.ldi.ld u.ldi.ld . (17) 25 Регулювання коефіцієнта потужності перетворювача здійснюють шляхом формування певного співвідношення між заданими значеннями активної і реактивної складових вхідного струму 30 i ref ref x.27, iy.27 . При iref 0 другий перетворювач 27 обмінюється з мережею тільки x.27 активною енергією. Компоненти потужності генеровані другим перетворювачем 27 повинні виключати складові потужності вищих гармонік, і реактивної потужності, тобто p27 ~ p 35 (18) q27 qld ( q ~) . q (19) Вихід блока розрахунку потужності 38 з'єднаний з першим входом четвертого координатного перетворювача 39, другий вхід якого з'єднаний з виходом блока керування напругою конденсатора 29. На виході четвертого координатного перетворювача 39 формують сигнал, який залежить від поточної фази напруги : 6 UA 119595 U iref cos sin iref 0 x.27 ref . iref sin cos iref i y.27 y.27 (20) Вихід блока датчиків струму мережі 31 з'єднаний з п'ятим координатним перетворювачем 40, на виході якого формується сигнал ixy.27 ix.27 2 2 2 ; ia cos ib cos( ) ic cos( ) 3 3 3 (21) iy.27 2 2 2 . ia sin ib sin( 3 ) ic sin( 3 ) 3 (22) 5 Вихід блока датчиків напруги мережі 33 з'єднаний з входом шостого координатного перетворювача 41, на виході якого формується сигнал u xy.27 ux.27 (23) uy.27 10 2 2 2 ; ua cos ub cos( 3 ) uc cos( 3 ) 3 2 2 2 . ua sin ub sin( ) uc sin( ) 3 3 3 (24) Перший вхід блока керування вектором струму мережі 42 з'єднаний з виходом п'ятого координатного перетворювача струму 40, на якому діє сигнал ixy.27 . Другий вхід блока керування вектором струму мережі 42 з'єднаний з виходом шостого координатного перетворювача 41, на якому діє сигнал u xy.27 . Третій вхід блока керування вектором струму мережі 42 з'єднаний з виходом четвертого координатного перетворювача 39, на якому діє 15 сигнал iref.27 . xy На підставі поточних складових струмів та напруг мережі з урахуванням відхилення поточних складових струму мережі від заданих i x.27 iref i x.27 ; x.27 ref iy.27 iy.27 iy.27 ; 20 (25) (26) та поточних складових вектора напруги u xy.27 визначають задані складові вектора напруги другого перетворювача 27 uref.27 з урахуванням компенсації перехресного зв'язку за напругою xy k uref ux.27 kc.pix.27 kc.i ix.27dt iref jLf iy.27 x.27 y.27 uref uy.27 y.27 c.p iy.27 kc.i iy.27dt iref jLf ix.27 , x.27 (27) (28) Lf Rf ; k cc.i ; Tkc T27.c ; L f , R f - індуктивність та активний опір 2Tксk 27.с 2Tксk 27.с мережевого фільтра 32; Tкс - некомпенсована стала часу другого перетворювача 27; k 27.с коефіцієнт передачі другого перетворювача 27; - частота напруги мережі. Блок керування вектором струму мережі 42 з'єднаний з сьомим координатним де k cc.i 25 перетворювачем 43, на виході якого діє сигнал uref .27 . abc uref uref cos uref sin ; a.27 x y (29) 30 7 UA 119595 U uref uref cos( b.27 x 2 2 ; ) uref sin( ) y 3 3 uref (uref uref ) . c.27 a b 5 20 2 t arctg tg ; t mod 2 2 (32) з відносним значенням заданої напруги керування генераторним перетворювачем в системі координат а, в, с, зокрема для фази А uout..a 15 (31) Вихід сьомого координатного перетворювача 43 з'єднаний з першим входом блока широтноімпульсної модуляції 44. Другий вхід блока широтно-імпульсної модуляції 44 з'єднаний з входом блока задання напруги конденсатора 30. Вихідну напругу блоку широтно-імпульсної модуляції 44 отримують шляхом порівняння опорної напруги: ucarr 10 (30) 1 при ucarr uref uref a.27 c 0 при ucarr uref uref a.27 c , (33) для фаз в та с аналогічним чином. Вихід блока широтно-імпульсної модуляції 44 з'єднаний з керуючим входом другого перетворювача 27. Розроблена структура системи керування мережевим перетворювачем відповідно до основних положень p q теорії, шляхом формування складової реактивного струму у каналі керування, забезпечує режим другого перетворювача, який додатково забезпечує компенсацію неактивних складових потужності вузла мережі з асинхронним генератором з фазним ротором. Керуючи струмом фазного ротора асинхронного генератора з фазним ротором реалізують задані рівні активної та неактивної потужності статора. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 35 40 45 50 Пристрій керування неактивною потужністю асинхронного генератора з фазним ротором, який містить приводний двигун, механічно з'єднаний з валом асинхронного генератора з фазним ротором, фази ротора асинхронного генератора з фазним ротором через буферну індуктивність з'єднані з першим перетворювачем, який колом постійного струму з'єднаний з другим перетворювачем, який відрізняється тим, що введено датчик швидкості, механічно з'єднаний з валом асинхронного генератора з фазним ротором, блок датчиків струму статора з'єднаний з фазами статора асинхронного генератора з фазним ротором та блоком датчиків напруги статора, який послідовно з першим автоматичним вимикачем з'єднаний з джерелом живлення, детектор, перший вхід якого з'єднаний з виходом блока датчиків напруги статора, блок розрахунку потоку повітряного зазору, перший вхід якого з'єднаний з виходом блока датчиків напруги статора, другий вхід детектора та другий вхід блока розрахунку потоку повітряного зазору з'єднані з виходом блока датчиків струму статора, третій вхід детектора та третій вхід блока розрахунку потоку повітряного зазору з'єднані з виходом датчика швидкості, перший суматор, першим входом з'єднаний з першим виходом детектора, другий вхід першого суматора з'єднаний з виходом блока заданої реактивної потужності, другий вихід детектора з'єднаний з першим входом другого суматора, другий вхід якого з'єднаний з виходом блока заданої активної потужності, вихід першого суматора з'єднано з першим регулятором струму, вихід другого суматора з'єднано з другим регулятором струму, датчик струму ротора вихід якого з'єднаний з другим входом першого координатного перетворювача, перший вхід якого з'єднаний з другим виходом блока розрахунку потоку повітряного зазору, перший вихід блока розрахунку потоку повітряного зазору з'єднаний з другим входом блока керування першим перетворювачем, перший вихід першого координатного перетворювача з'єднаний з другим входом третього суматора перший вхід якого з'єднаний з виходом другого регулятора струму, другий вихід першого координатного перетворювача з'єднаний з другим входом четвертого суматора, перший вхід якого з'єднаний з виходом першого регулятора струму, вихід третього суматора, з'єднаний з входом першого регулятора напруги, вихід першого регулятора напруги з'єднаний з 8 UA 119595 U 5 10 15 20 25 першим входом блока керування першим перетворювачем, вихід четвертого суматора, з'єднаний з входом другого регулятора напруги, вихід другого регулятора напруги з'єднаний з третім входом блока керування першим перетворювачем, блок керування першим перетворювачем з'єднаний з керуючим входом першого перетворювача, конденсаторний накопичувач, паралельно з'єднаний з другим перетворювачем та датчиком напруги конденсаторного накопичувача, другий перетворювач фазними виводами через блок датчиків струму мережі та мережевий фільтр з'єднаний з блоком датчиків напруги мережі, другим автоматичним вимикачем який послідовно з'єднаний з джерелом живлення, до джерела живлення через блок датчиків струму додаткового навантаження підключене додаткове навантаження, вихід датчика напруги конденсаторного накопичувача з'єднаний з другим входом блока керування напругою конденсатора, перший вхід блока керування напругою конденсатора з'єднаний з виходом блока задання напруги, вихід блока датчиків струму додаткового навантаження з'єднаний з входом другого координатного перетворювача, вихід якого з'єднаний з другим входом блока розрахунку потужності, перший вхід якого з'єднаний з виходом третього координатного перетворювача, вхід якого з'єднаний з блоком датчиків напруги мережі, вихід блока розрахунку потужності з'єднаний з першим входом четвертого координатного перетворювача, другий вхід якого з'єднаний з виходом блока керування напругою конденсатора, вихід блока датчиків струму мережі з'єднаний з п'ятим координатним перетворювачем, вихід блока датчиків напруги мережі з'єднаний з входом шостого координатного перетворювача, блок керування вектором струму мережі, перший вхід якого з'єднаний з виходом п'ятого координатного перетворювача, другий вхід блока керування вектором струму мережі з'єднаний з виходом шостого координатного перетворювача, третій вхід блока керування вектором струму мережі з'єднаний з виходом четвертого координатного перетворювача, вихід блока керування вектором струму мережі з'єднаний з входом сьомого координатного перетворювача, вихід якого з'єднаний з першим входом блока широтно-імпульсної модуляції, другий вхід якого з'єднаний з виходом блока задання напруги, вихід блока широтно-імпульсної модуляції з'єднаний з керуючим входом другого перетворювача. Комп’ютерна верстка А. Крижанівський Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 9
ДивитисяДодаткова інформація
МПК / Мітки
МПК: H02P 9/44, H02M 11/00, H02P 9/00
Мітки: фазним, генератора, пристрій, потужністю, асинхронного, керування, неактивною, ротором
Код посилання
<a href="https://ua.patents.su/11-119595-pristrijj-keruvannya-neaktivnoyu-potuzhnistyu-asinkhronnogo-generatora-z-faznim-rotorom.html" target="_blank" rel="follow" title="База патентів України">Пристрій керування неактивною потужністю асинхронного генератора з фазним ротором</a>
Пристрій керування потоками потужності асинхронного генератора з компенсацією неактивних складових потужності мережі
Номер патенту: 113688
Опубліковано: 10.02.2017
Автори: Бялобржеський Олексій Володимирович, Євтушенко Любов Геннадіївна
МПК: H02M 11/00, H02P 9/00
Мітки: керування, генератора, неактивних, компенсацією, асинхронного, потоками, мережі, потужності, складових, пристрій
Формула / Реферат:
Пристрій керування потоками потужності асинхронного генератора з компенсацією неактивних складових потужності мережі, який містить приводний двигун, з'єднаний через датчик швидкості механічно з валом асинхронного генератора, три фази статорної обмотки асинхронного генератора з'єднані з входом генераторного перетворювача, який колом постійної напруги з'єднаний з конденсатором, паралельно до конденсатора приєднаний датчик напруги, який...
Пристрій пусковий асинхронного двигуна з фазним ротором
Номер патенту: 68039
Опубліковано: 12.03.2012
Автор: Чуйко Віктор Андрійович
МПК: H02K 17/00, H02K 17/02
Мітки: асинхронного, ротором, пристрій, пусковий, двигуна, фазним
Формула / Реферат:
Пристрій пусковий асинхронного двигуна з фазним ротором, що містить трифазний випрямляч в колі ротора, пусковий реостат із декількох ступенів, тиристори прискорення і лінійний, реле керування тиристорами і резистори, який відрізняється тим, що герконові реле керування тиристорами прискорення за числом ступенів реостату ввімкнуті на вихід випрямляча, а нормально замкнуті контакти окремого реле - в коло керування відповідного тиристора, при...
Пристрій імпульсного керування процесами перетворення енергії в асинхронному двигуні з фазним ротором
Номер патенту: 64126
Опубліковано: 25.10.2011
Автори: Коцур Ігор Михайлович, Коцур Михайло Ігорович, Андрієнко Петро Дмитрович
МПК: H02P 27/05
Мітки: імпульсного, двигуні, асинхронному, керування, процесами, пристрій, перетворення, фазним, ротором, енергії
Формула / Реферат:
Пристрій імпульсного керування процесами перетворення енергії в асинхронному двигуні з фазним ротором, що містить некерований випрямляч, до якого підключено виводи обмотки ротора асинхронного двигуна, катодні та анодні групи яких, відповідно, приєднані до силового ключа, при цьому виводи статорної обмотки асинхронного двигуна приєднано до мережі електропостачання, який відрізняється тим, що силовий ключ виконано у вигляді транзистора та...
Пристрій для пуску асинхронного двигуна з фазним ротором”
Номер патенту: 4829
Опубліковано: 28.12.1994
Автори: Калюжний Володимир Владиславович, Плугатар Олексій Петрович, Волков Ігор Володимирович, Гольцев Володимир Іванович, Спікторенко Микола Федірович, Ісаков Володимир Миколайович
МПК: H02P 21/06, H02K 17/24
Мітки: асинхронного, пуску, пристрій, ротором, фазним, двигуна
Формула / Реферат:
Устройство для пуска асинхронного двигателя с фазным ротором, содержащее первый трехфазный мостовой выпрямитель, блок формирования тока роторной цепи асинхронного двигателя, точки соединения анодов и катодов диодов каждой фазы первого трехфазного мостового выпрямителя снабжены зажимамидля подключения выводов роторной обмотки асинхронного двигателя, катоды и аноды диодов первого трехфазного мостового выпрямителя объединены и подключены...
Пристрій для електродинамічного гальмування асинхронного електродвигуна з фазним ротором
Номер патенту: 7984
Опубліковано: 26.12.1995
Автори: Кулібанов Вячеслав Іванович, Півень Іван Миколайович, Шустов Борис Миколайович
МПК: H02P 3/18
Мітки: фазним, ротором, асинхронного, пристрій, електродвигуна, електродинамічного, гальмування
Формула / Реферат:
Устройство для электродинамического торможения асинхронного электродвигателя с фазным ротором, содержащее трехфазный двухпо-лупериодный выпрямительный мост, выходкоторого через коммутационный элемент подключен к двум выводам обмоток статора, а вход - к выводам обмоток ротора, и источник энергии, отличающееся тем, что в качестве источника энергии использована конденсаторная батарея, подключенная пофазно к выводам обмоток статора.
Попередній патент: Екстремальний регулятор потужності сонячної батареї
Наступний патент: Спосіб підсилення анальгетичної дії центрального генезу мелоксикаму
Випадковий патент: Клиновий коуш